1. Introduction
In the literature describing the problems of planning unmanned systems missions, there are theoretical algorithms for determining unmanned aerial vehicle (UAV) flight routes for individual UAVs or UAV swarms that cooperate together. A detailed introduction to the issues of route planning along with the presentation of the taxonomy of the problem is given in the paper by Coutinhoa et al. [
1]. Yang et al. [
2] present a detailed description of robot 3D path planning algorithms that have been developed in recent years for universally applicable algorithms which can be implemented in aerial robots and ground robots. Depending on the level of route planning details, these algorithms can be divided into general mission performance plans and detailed mission schedules that contain accurate information about flight routes.
The general plans include the allocation of targets for each of the UAVs available during the mission, but they do not specify how to fly to and between destinations. Examples of articles dealing with this type of a problem are given in the paper by Stecz, Gromada [
3]. The work in [
3] focuses on presenting how to plan fixed-wing UAV missions using SAR during reconnaissance. The concept of mapping flight paths taking into account terrain obstacles was presented. Exact algorithms that can solve this problem were shown in contrast to heuristic methods described in most of papers. On the basis of the presented examples, it has been proved that it is possible to very precisely define the UAV mission plan, taking into account the parameters of its payload.
A specific approach to route planning is a Computational-Intelligence-based (CI) UAV path planning presented in the paper by Zhao et al. [
4]. They present different CI algorithms utilized in UAV path planning and the types of environment models, namely, 2D and 3D.
Another type of a route planning problem, where a sensor use is not usually considered, is route planning in real-time. An example is the paper by Schellenberg et al. [
5], in which the genetic algorithm implemented on the aerial platform is used to observe volcanic eruptions. The article also introduces the classification of algorithms for unmanned systems, dividing UAVs into Remotely Controlled Systems, Automated Systems, Autonomous Non-Learning Systems, and Autonomous Learning Systems with the ability to modify rules defining their behaviors. Using the classification presented in this work, it can be said that determining optimal UAV flight trajectories for the purpose of target recognition assigns the systems of this type to the Automated Systems’ group.
Detailed schedules determine the exact flight routes along which the UAV should fly, and additionally they take into account the parameters of the sensor assigned to the target [
6,
7]. This task group includes the recognition planning tasks using a sensor of a specific type for recognition of targets located in a predefined area. There is a wide collection of articles describing tasks in this group, an example of which is the article by Vasquez-Gomez et al. [
8].
Preparation of a detailed mission plan for tactical class UAVs was discussed in the article written by Stecz, Gromada [
3]. The article presents a way of building a mission plan including a UAV flight, which is to recognize the largest number of the highest priority targets, to which Synthetic Aperture Radar (SAR) has been assigned.
From the optimization theory point of view, when planning a mission based on recognition orders, the global task Vehicle Routing Planning with Time Windows (VRPTW) [
9,
10,
11] is usually solved. The solution of this task guarantees UAV flight between all major targets. A concise overview of exact, heuristic and metaheuristic methods was presented by El-Sherbeny [
9]. More advanced models were presented by Schneider [
10] and Hu et al. [
11]. Schneider [
10] presented a variant of the VRPTW that uses specific service times to model the familiarity of the different drivers with the customers to visit. Hu et al. [
11] presented how to deal with uncertain travel times. However, the models presented in the articles by Stecz, Gromada [
3] and Mufalli et al. [
6] did not take into account the way each target was identified, because all available UAV sensors and threats that UAV might encounter during a reconnaissance mission were not taken into account. Detailed guidelines related to the quality of the recognition material that should be obtained were not also taken into account. The quality of the material is determined in the case of EO/IR systems on the The National Imagery Interpretability Rating Scale (NIIRS) (see in [
12]), which can be adapted to SAR. From the point of view of optimization principles, therefore, no procedures were presented for solving the local task, i.e., planning the flight trajectory to recognize each of the targets in its location.
This article presents an in-depth analysis of the mission planning method for tactical class fixed-wing UAV and introduces new algorithms related to determining the UAV flight trajectory in the neighborhood of the recognized target. The results of our experience, as part of the construction work on tactical class fixed-wing UAV, are described. The article presents the algorithms for planning the detailed flight trajectory of a fixed-wing UAV, which uses EO/IR and SAR for recognition. As the work concerns tactical class UAVs, the trajectories for the SAR must be particularly carefully defined. Even slight deviations from the designated traffic section may make the prepared SAR scan unreadable. Thus, the task of determining the correct trajectory including terrain obstacles becomes critical. So far, the assumption is that a short-range tactical class system, that operates on a ceiling of 1000–5000 m above the ground level, is considered. By default, its flight length is no more than 6–8 h. This class of systems includes, for example, Hermes 450, which is a tactical class system project.
In the first part of the article, in
Section 2.1, the requirements related to the quality of recognition data that should be obtained by UAVs are discussed. In the case of optoelectronic systems, the data quality is described by the NIIRS [
12,
13]. In the case of SAR, the quality can be expressed in NIIRS or the resolution of the obtained scan [
12,
13,
14]. Principles of flight planning in the neighborhood of the target were discussed when the planner has a terrain map with an altitude grid DTED (for more information about DTED see in [
3]). The similarity of the NIIRS to the method of assessing the quality of SAR scans by its resolution was shown.
The second part of the article (
Section 4) presents an extended model of building a UAV mission plan, which was presented in the work by Stecz, Gromada [
3]. The construction of the mission plan, understood as the determination of flight routes between the reconnaissance targets, requires the preparation of a complicated network whose vertices model the UAV flight direction or sensor parameter settings change points, and the network arcs model the route segments on which the reconnaissance is carried out or the route segments of the flight between successive targets. Network construction requires the use of the advanced GIS (Geographic Information System) tools to analyze the area of visibility (related to Line of Sight, see in [
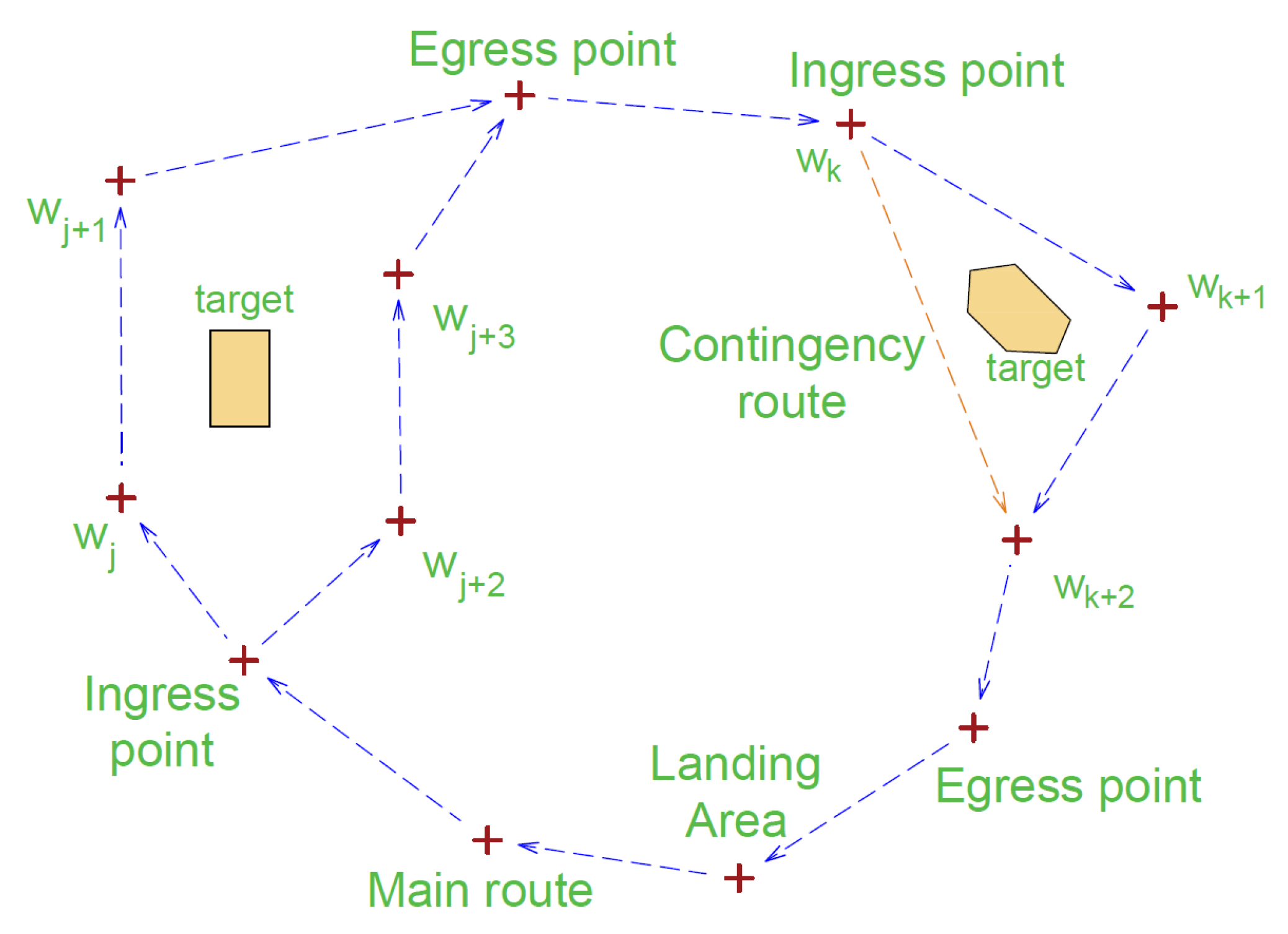
3]). In the case of determining the flight path for recognition of a single target, it is assumed that the start and end points of the recognition were determined (so-called ingress and egress points, see
Figure 1). The modified model, presented in
Section 4.1, takes into account the situation shown in
Figure 1, when there is more than one possible UAV flight route in the neighborhood of the recognized target. In the case shown in the figure, the first target can be recognized by UAVs flying one of the route segments
or
. The route planning algorithm indicates the preferred route segment, but this can be changed after solving the optimization task (local task presented in
Section 4.2).
The third part of the article in
Section 4.2 presents the method of determining a detailed UAV flight route in the neighborhood of the target (flight trajectory), based on the general UAV flight plan. The type of a sensor used for recognition is taken into account.
Figure 1 shows that flight routes are determined between the entry point (ingress point) to the reconnaissance area and the vertex
or
and the end point of the reconnaissance
or
and the exit point (egress point) from the recognition area.
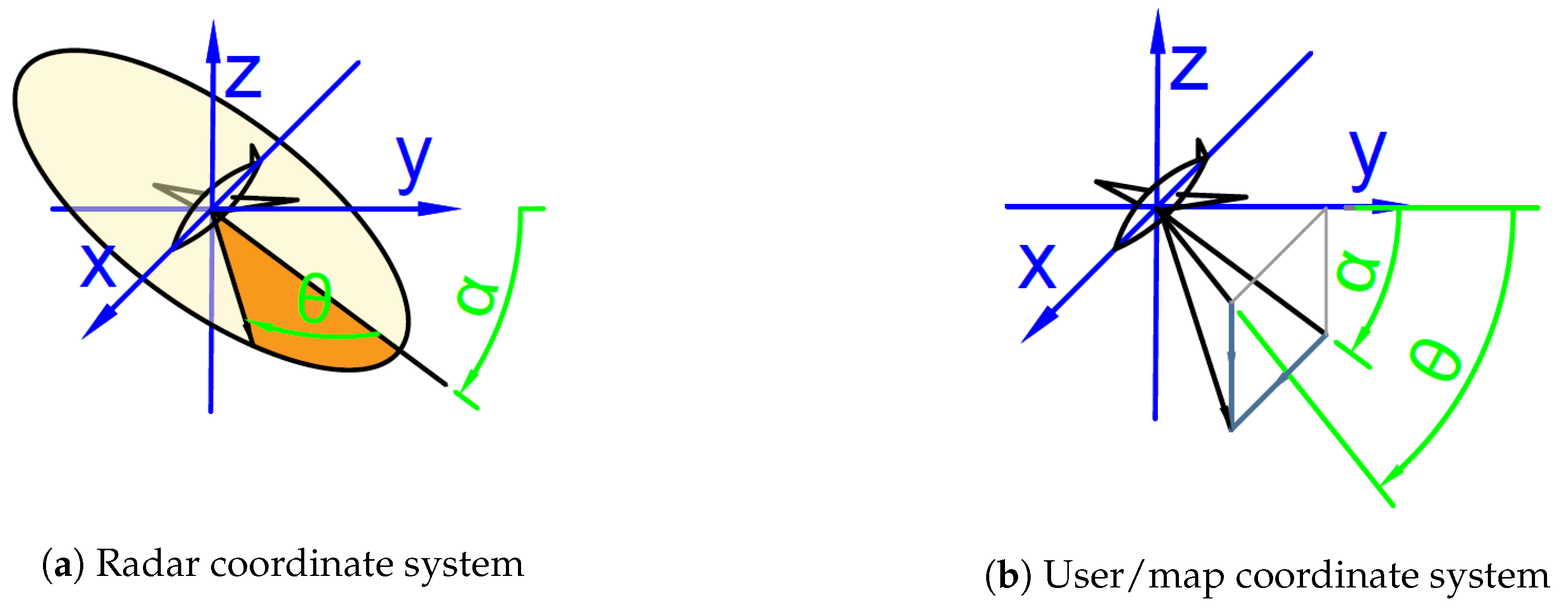
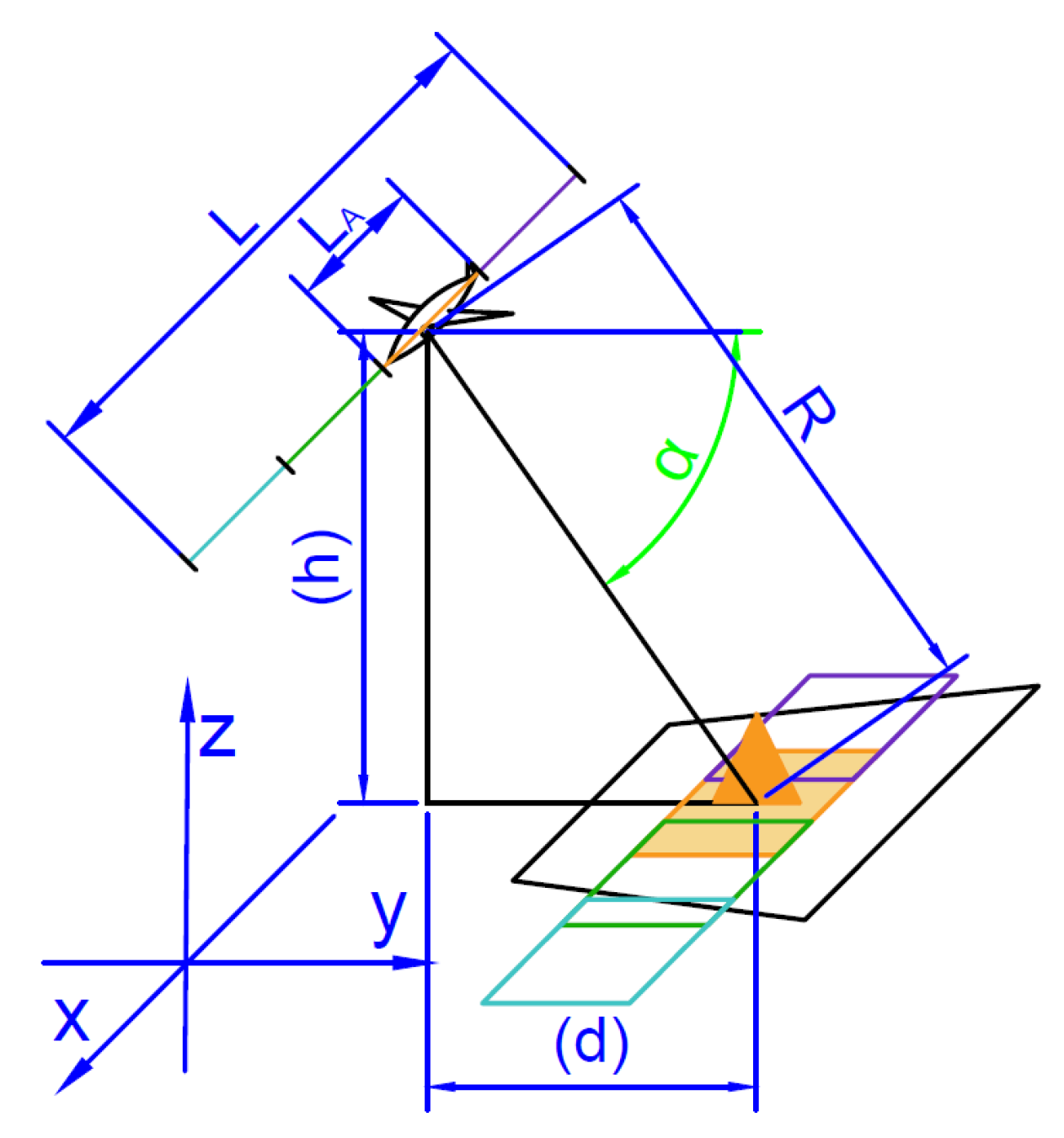
When determining the flight trajectory for UAV target recognition, a set of constraints related to battlefield recognition is defined that should be taken into account when planning the flight trajectory. The most important constraints taken into account include the type of a sensor to be used, the quality of the recognition material to be obtained (set on the NIIRS), and the parameters of the UAV itself. In the case of UAV parameters, the most important are operational speed, operational flight altitude, available payload useful for recognition, and time to reach the optimum altitude for the recognition with a given type of a sensor. For these systems, meteorological conditions prevailing in the recognition area (mainly wind speed and cloud cover) are extremely important. This applies also to SAR.
There are several approaches in the literature to solve the local task of UAV flight trajectory optimization. One of them was presented in the work by Stecz, Gromada [
3], when the algorithm of modification of the real length of the flight path between points was presented. At that time, it was assumed that the obstacles are convex polygons. For hazards modeled in the form of hemispheres in 3D or circles in 2D, it is better to use dynamic optimization. Models of this class are often converted to MILP models, as shown in the work by Pytlak [
15].
For an advanced overview of dynamic optimization rules, see Pytlak [
15]. An alternative approach is to use heuristics construction algorithms [
16,
17,
18]. The limitations of these methods are related to the lack of solvers to facilitate the construction and solution of these algorithms.
The rest of the article shows the methods of smoothing the flight trajectory to reflect the real flight trajectory of a given class platform. Due to the size of the platform (tactical class includes UAV up to 150 kg total weight), turning radius and turning time are not negligible. The article presents a new algorithm for the construction of real trajectories of tactical platforms. Based on the definitions introduced by Coutinhoa et al. [
1], it can be said that the article presents the problem of planning flight routes and determining the UAV flight trajectory operating alone in which a Dubin’s vehicle model has been used. The flight dynamics is neglected. Multiple waypoints must be visited. The obstacles are present and they are presented as halfspheres. Flight times, velocities, and accelerations are optimization variables.
A novelty of the approach presented in the paper is the integration of the task of global mission planning with local tasks of determining the trajectory of flights between waypoints. In addition, an efficient algorithm for calculation of the actual flight trajectories of the tactical platform having a turning radius exceeding 100 m was presented. All models are MILP models, which guarantee the determination of the optimal solution, if any. In addition, the wide availability of solvers for these tasks allows for the implementation of these algorithms on UAV also for on-line calculation.
Finally, it is worth noting that the UAV system class cannot be detached from the route planning algorithms and the UAV flight trajectory algorithms. In particular, when it is planned to use the sensors of a particular type. Otherwise, simplifying the model makes it useless. In the case of a tactical class system, the most important elements determining the efficiency of its recognition are the operational speed and the maximum flight parameters (speed and height of flight), which are up to 200 [km/h] and 5000 [m] above ground level, respectively.
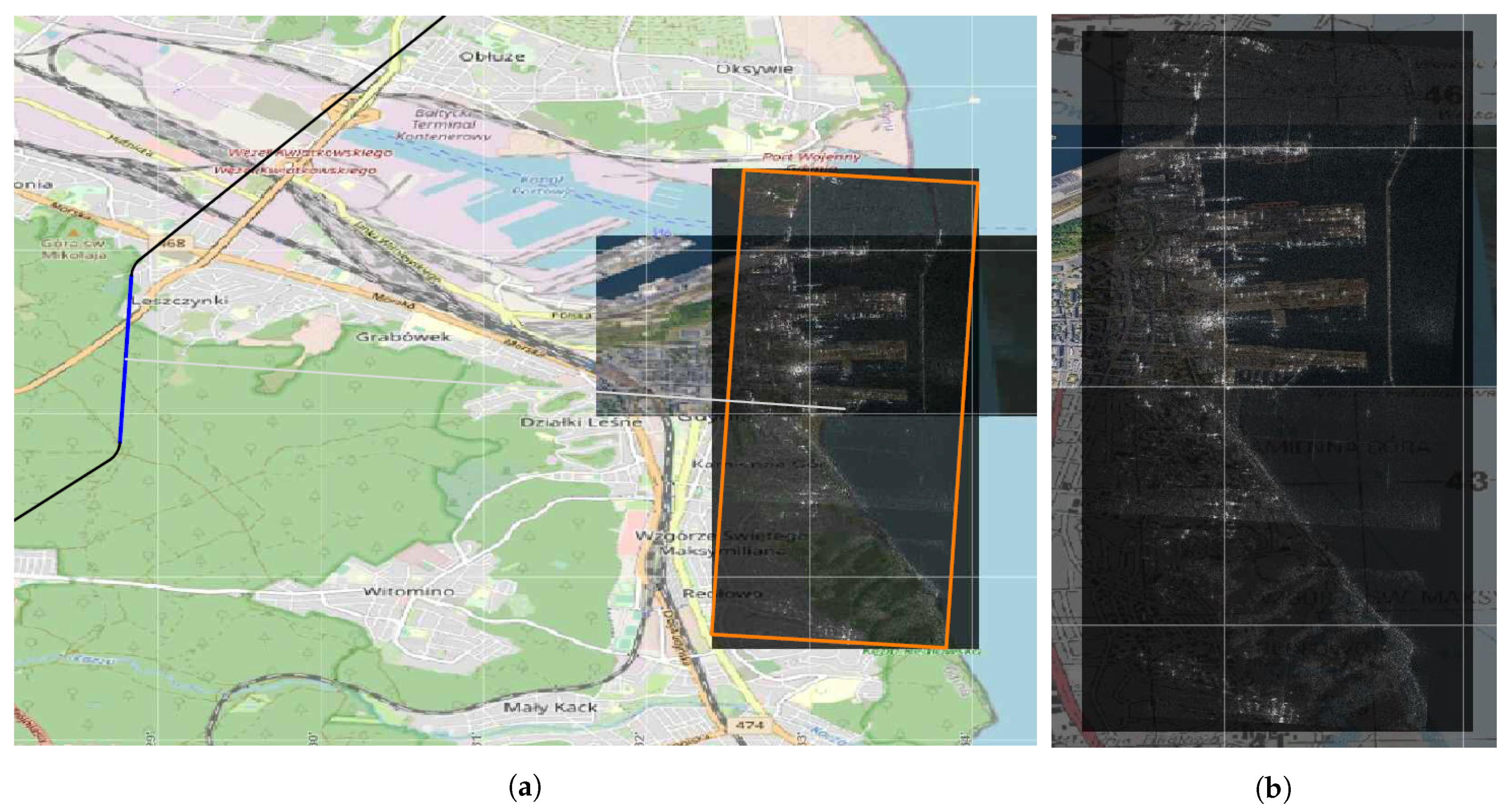
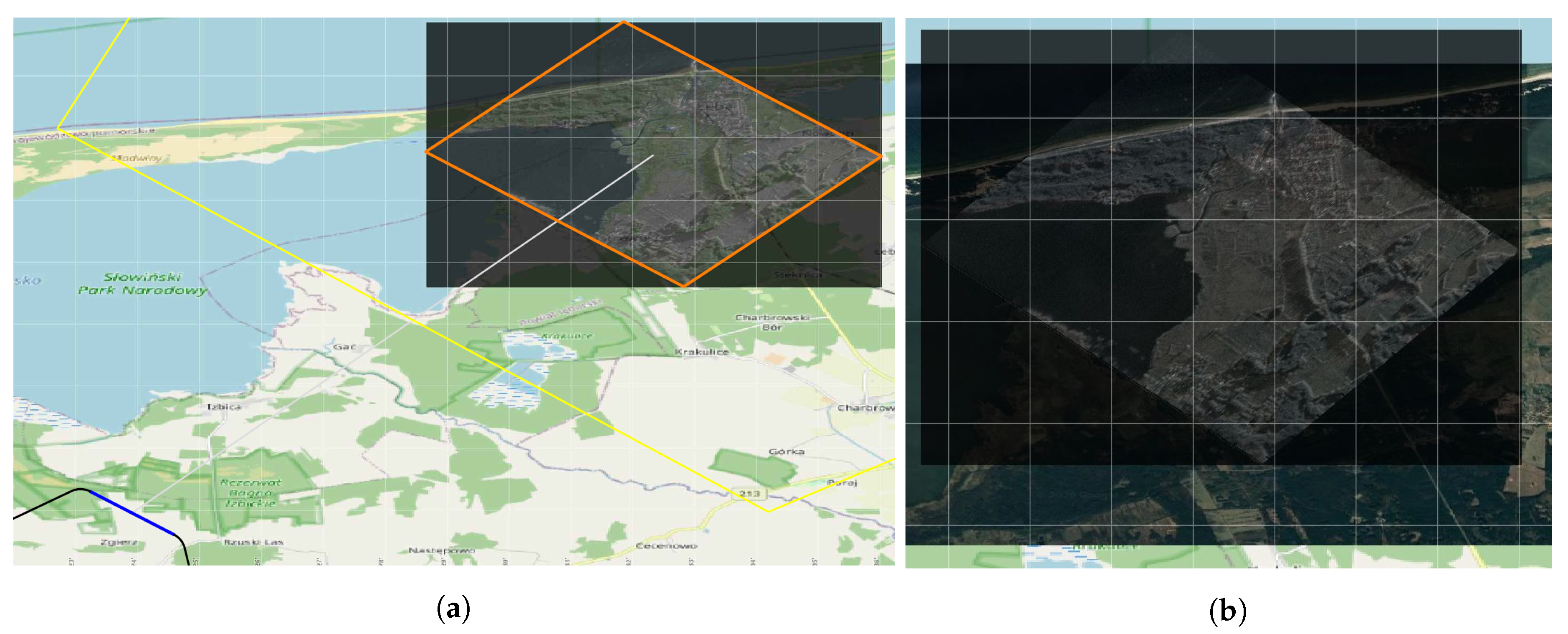
For each of the presented tasks, exemplary results are provided along with examples of recognition materials collected at the designated trajectories.
4. UAV Flight Planning Procedure Using Sensors to Recognize Targets
For the purpose of solving the route planning problem, the network
is introduced that models the area of UAV activity. The vertices
model the waypoints of the network
, the arcs
model the route segments that can be used by UAV when flying from the point number
to the point number
where
. The reference network model for route modeling is shown in STANAG 4586 ([
25]). The targets are near some network arcs what was presented in
Section 2.1. Due to their recognition capabilities, tactical UAVs do not need to fly directly above the recognized target.
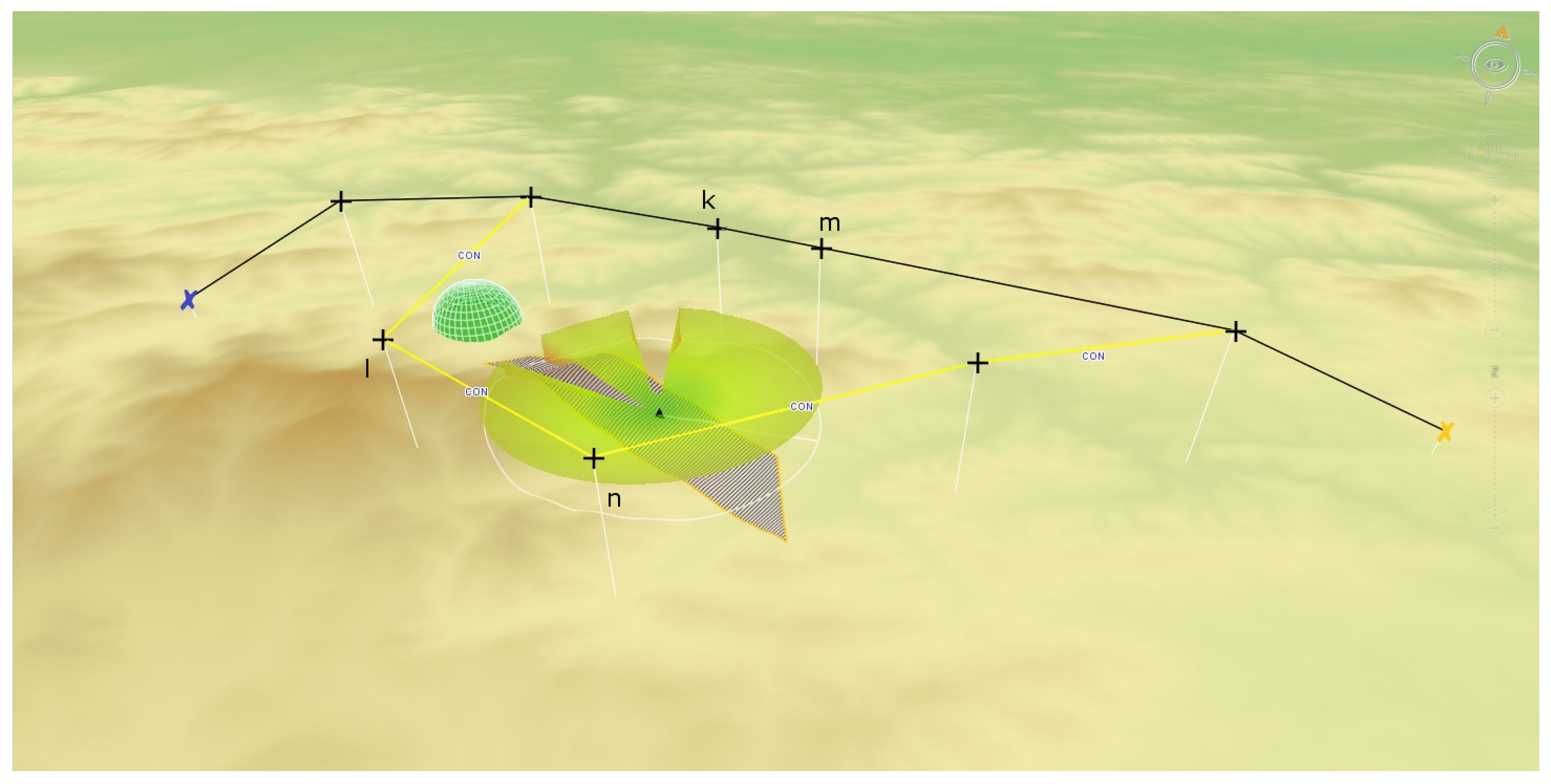
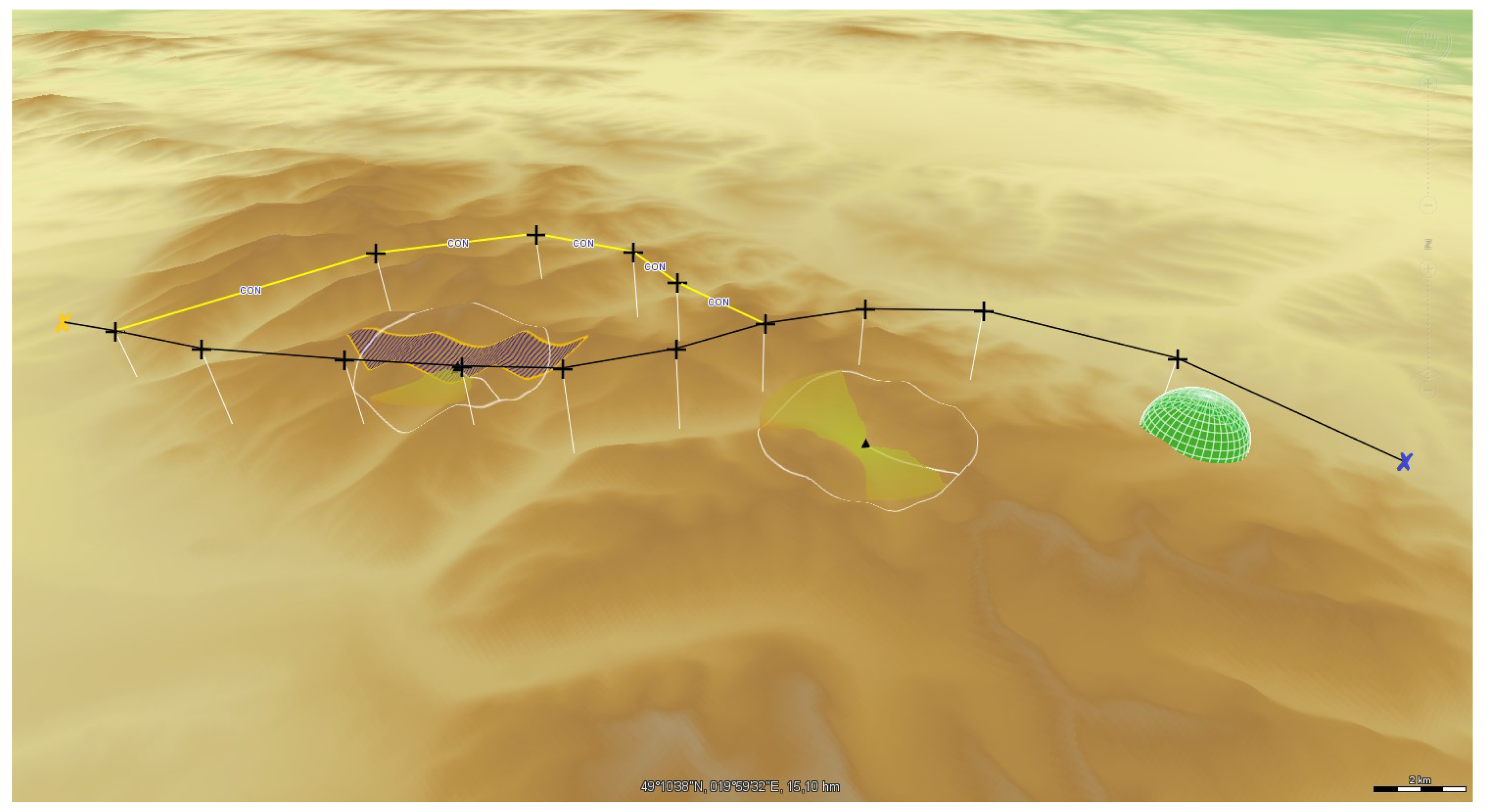
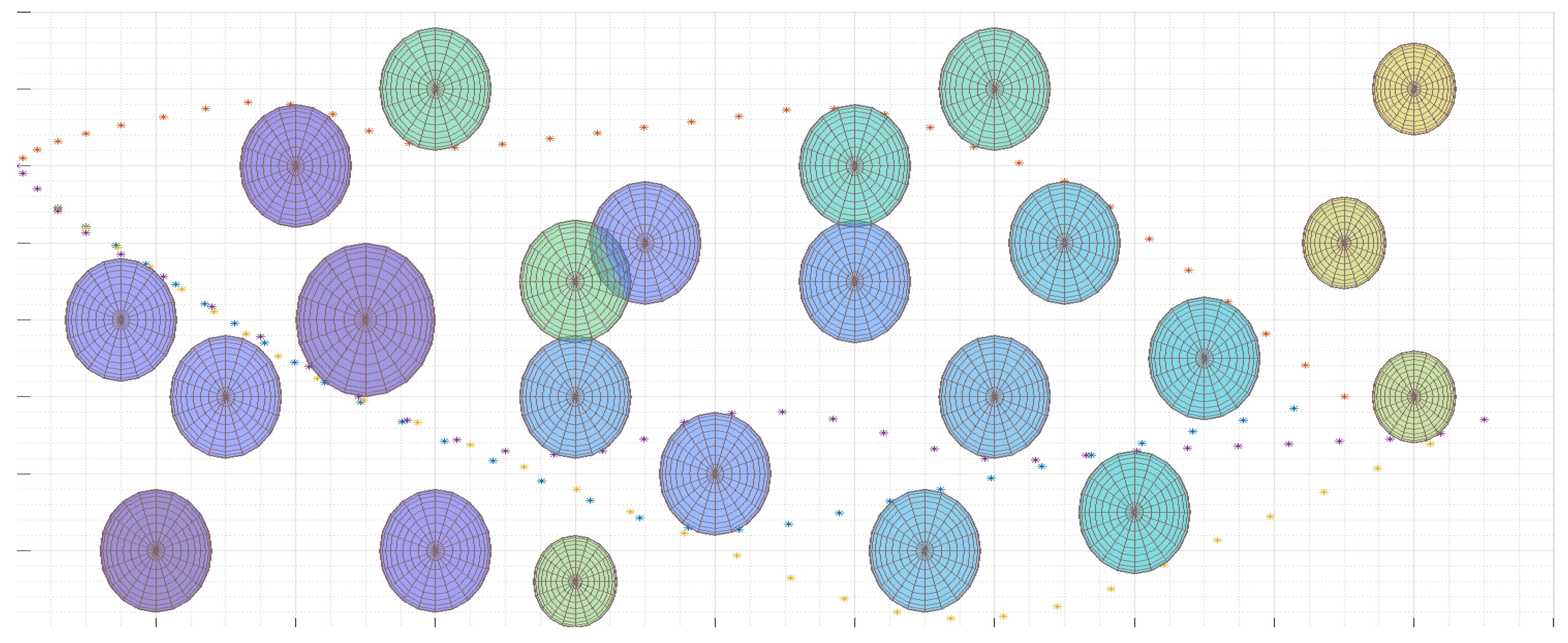
Figure 7 shows an example network.
The presented mission planning problem is to find the routes for UAV, that minimizes flight time and/or ensures recognition of the most important targets. Many constraints affecting the implementation of the mission are taken into account. For example: the UAV parameters like maximum range, the presence of threats, the required time windows in which UAV should reach their destination. These constraints are included in the model presented in the paper in the form of a Mixed Integer Linear Problem (MILP) task in
Section 4.1.
The presented procedure for preparing the mission plan has three main steps and it is presented in Algorithm 3.
| Algorithm 3 Route planning algorithm |
- 1:
Import data: (set of targets), (set of danger zones), (set of airfields) - 2:
Select the route segments assigned to all targets and sensors used to recognise target ( Section 2.1) - 3:
Find feasible route plan for UAV between airfields on - 4:
Update distances among vertices of using algorithm presented in [ 3] or algorithm from Section 4.2 using information about obstacles - 5:
- 6:
Transform generated path into a feasible trajectories - 7:
- 8:
|
At the first step all data is imported. When planning a real mission, obstacles that threaten UAVs must be imported. All targets that UAVs must recognize are also loaded into the model.
Next, for all the targets, the sensors used for recognition of each target are assigned with predefined quality of images that must be collected as described in
Section 2.1. For each target, which will be recognized using a given type of sensor, the UAV flight segment modeled by arc
of
is chosen. The UAV flight segment in the neighborhood of the recognized target must be located at the optimal distance for reconnaissance. According to
Section 2.1, for each arc
, describing the flight segment near the target, a set of predefined flight parameters are set.
In the third step all the possible route segments between all pairs of vertices are selected. The vertices model the points lying near the targets to be recognized. For determining the shortest paths between pair of vertices, the Dijkstra algorithm can be used.
Next, at the fourth step, the distances between all pairs of waypoints are updated. The reason is that the network
must be updated with the real travel times for UAV. Therefore, one has to use one of the algorithms described in literature. In the paper by Stecz, Gromada [
3], a version of distance calculation for any pair of vertices was presented, where the obstacles were convex polygons. This version is very convenient to use where there is a small number of obstacles according to a number of waypoints. Other way of calculating real flight routes is presented in
Section 4.2.1. This approach is based on optimal control problems theory presented in Pytlak [
15]. There are some other approaches which use triangulation and Voronoi diagrams ([
26]). One of these methods is presented in Xin et al. [
18] and Kim [
17]. Xin et al. presented a method that plans the paths in 3D space. This method includes two steps: the construction of network and path searching. The construction of network proceeds in three phases and after these phases a net for a path planning is prepared. More complicated version of network construction plausible for path planning is presented by Kim [
17]. In this article, multi-robot strategies of terrain exploration is presented in a cooperative manner. The presented strategies do not require global localization of a robot, but each robot builds its own Voronoi diagram as a topological map of the environment.
It is assumed that a robot can communicate. As the sensor network built by one robot meets the network built by another robot, the robots exchange the information with each other. The method presented by Zhang et al. [
27] is also worth noting. This paper presents an improved heuristic algorithm based on Sparse
Search for UAV path planning problem.
As a result of determining the shortest paths between the pairs of vertices, the square matrix is defined, where in any cell of matrix the flight time between the vertices is recorded.
At the fifth step, the routing problem VRPTW is solved. If exists the feasible solution, this solution is also optimal. The details of VRPTW were shown in the paper by Stecz, Gromada [
3]. In this paper, one important modification is presented. This additional constraint allow to choose one of alternative route segments assigned to a target, what was shown in
Section 2.1. Being able to choose one of the alternative flight paths near your destination is critical to successful mission performance.
In the last step, the optimal trajectories are calculated. This process is divided into two parts.
Section 4.2.1 discusses the determination of optimal UAV flight trajectories during reconnaissance of a target between the so-called ingress points and egress points. The presented method allows for determining the optimal flight trajectory between any pair of vertices. Each network vertex has the predefined location
. This is used not only for calculating flight times between destinations but also when the real trajectories are calculated in the second part of an algorithm.
4.1. VRPTW Model Redefinition
The section presents the modified version of the VRPTW model for determining UAV flight routes which was originally presented in Stecz, Gromada [
3]. The model extensions allow the solver to choose one of the available UAV flight segments during target recognition, which is extremely important in reconnaissance tasks in which UAVs can be destroyed by enemy forces.
Figure 1 presents an example of a fragment of the network
on which the optimal flight path is determined. The VRPTW problem is presented in the form of a MILP formulation, so when a solution is found, this solution is feasible and optimal one. The presented model also includes the use of a specific type of sensor for recognition.
Model parameters:
—set of indices of waypoints () elements.
Each waypoint is described by the vector , where elements of this vector means: —waypoint coordinates, e—earliest date when an operation or task can start, d—date when a planned task should be completed, p—priority.
—set of all waypoints and landing bases’ indices.
—travel time matrix, where each element represents a time that UAV needs to fly from to .
—ISR matrix where each waypoint has predefined time needed for recognition tasks as a sensor configuration.
Model variables:
—1 if UAV travels from to ; 0 otherwise,
—1 if target assigned to the route segment is recognized with the sensor by any UAV; 0 otherwise
—1 if UAV travels through the waypoint ,
—arrival time of UAV to the waypoint ,
An optimization task based on the minimization of the travel time of the UAVs:
subject to:
The optimization function is presented in (
19). This function has two parts. One part with
, as the an optimization coefficient (
) models the travel times of UAVs. Next part models the profits from visiting some number of the targets with the predefined priorities. It is up to the analyst, to prefer the minimization of UAV flight time or prefer the maximization of recognized targets.
Constraint (
20) ensures that each target is recognized up to once. It is not necessary to carry out a reconnaissance of the destination if it was not specified in the order [
28].
Constraint (
21) means that if a target is recognized by UAV, then a proper sensor must be chosen for recognition. This sensor is predefined during a mission plan preparation.
Constraint (
22) means that the flights within the same vertex are not allowed. This also applies to landing sites. It should be noted that in the presented model the start and end landing sites always describe a different network vertex of
.
In the article, there is an assumption that every UAV must fly on a mission. This is a technical constraint. In a real situation, there is no need to begin a mission for each UAV. The presented situation is modeled by a constraint (
23).
A classical flow preservation requirement for any net is presented as a constraint (
24). When the UAV flew into the vertex, it must fly out of the vertex.
Each UAV, that has begun its mission, must return to the landing base
(
25).
In the case of the VRPTW problem, additional time window constraints should be added. The time window for recognition is the time it takes for the target to be recognized in order to obtain reliable and useful information. Time window constraints are presented in Equations (
26)–(
28).
A time of UAV arrival to the waypoint
from the waypoint
is presented in constraint (
26). This time must be greater than the time of arrival to the waypoint
plus a travel time between both waypoints and a time needed for reconnaissance task. Constraint (
27) prevents UAV from starting the task before the earliest possible date and constraint (
28) prevents from starting the task to late.
Figure 7 shows the situation when the planner has identified two possible ways to recognize the target by UAV. In the first case, the UAV can fly after the route segment
, in the second case, the route segment
. UAV can start recognition by flying from any vertex
or
(analogously for the second route segment). This maintains the planner flexibility, while planning of target recognition, assuming that the target can be recognized by a UAV flying from several directions.
Figure 7 shows this situation for the case of diagnosis using SAR. Constraint (
29) forces a solver to choose one of two defined edges to fly through this
. Constraints (
30) and (
31) apply to the requirement to fly over the specified edge. The constraints enforce flight on the indicated edge, but they do not enforce the flight direction.
It should be remembered that the task of VRPTW will be solved correctly if for the indicated network arcs, which have been designated as route segments of the potential UAV flight over the target, the higher priority will be set than for other sections of the route.
Next two constraints are technical constraints that forces solver to choose the proper vertices and edges. Constraint (
32) ensures that when UAV travels from
to
then
equals 1. And when
equals 1, then the both waypoints
must be visited (constraint (
33)). These constraints are obligatory when constraints (
29)–(
31) are used.
The constraints commonly used to eliminate subtours in VRP were omitted. They were presented in Stecz, Gromada [
3] and they are widely known. The first description of them was presented in Miller et al. [
29]. Some other simple constraints, like the maximum travel time of UAV, stating that UAV flight time cannot be longer than its maximum possibility were omitted too.
4.2. Optimal Trajectory Calculation
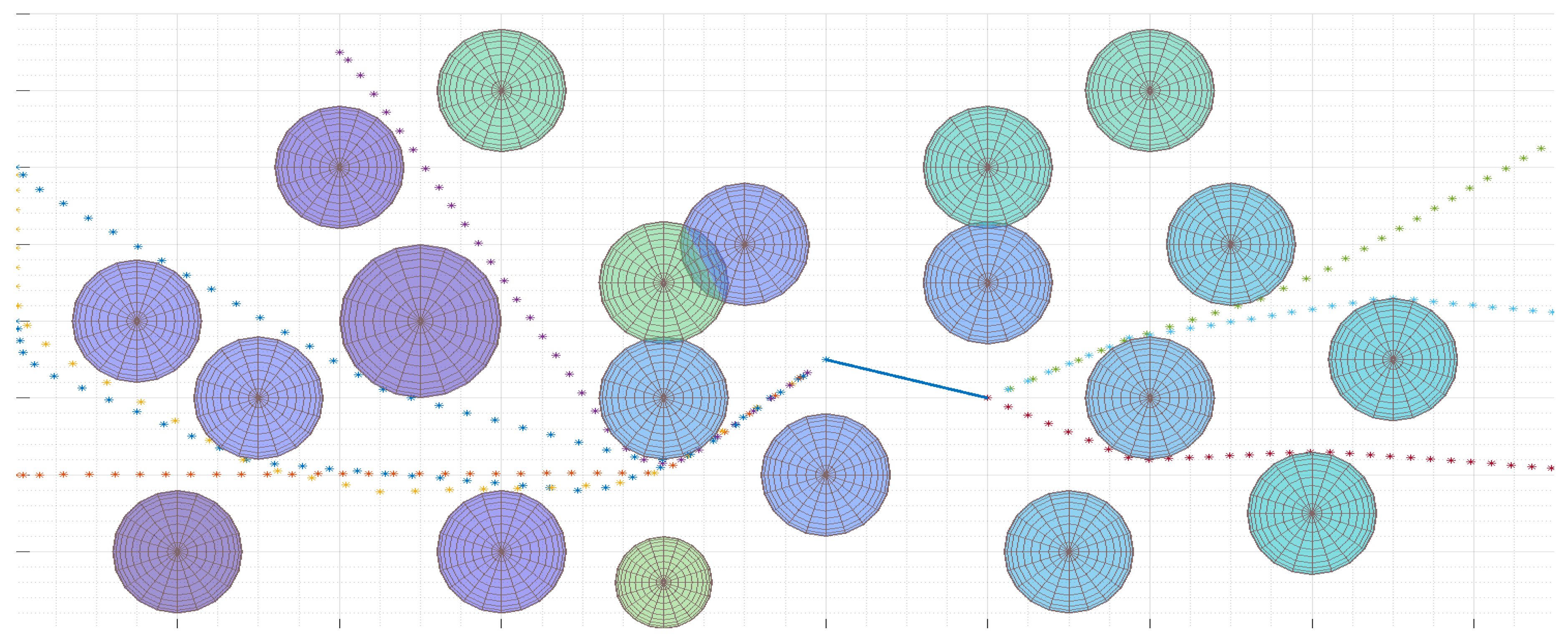
The essential part of determining the optimal trajectory for the UAV recognizing the target is to determine the possible trajectory based on the mathematical model presented below. The model takes into account the movement of UAVs in the area where there is probably a threat that is modeled in the form of hemispheres in 3D or circles in 2D. The 2D model is used when it is assumed that the UAV moves at a given height, which is not being changed. These types of threats are most common in practice and they are usually modeled in this way.
The UAV path planning problem is an optimization problem to obtain an optimal cost value under limited constraints, and it is usually modeled as a nonlinear optimal control problem. A good introduction to solving this type of task is the book written by Pytlak [
15].
However, some of these tasks can be discretized and solved by classical linear integer methods, as shown in the article in
Section 4.2.1. The presented model in the form of a MILP task is used to determine the possible UAV flight path without specifying the exact flight profile. The model allows the analyst to check if the UAV can fly between the inlet point of the recognition area (ingress point) and the start point of recognition. Similarly, the model allows for verification of the possibility of flight between the recognition end point and the exit point from the recognition area (so called egress point), which was described earlier in
Section 4 and presented in
Figure 1.
As a result of solving the above task, one get two initial UAV flight trajectories. In order to accurately determine the real UAV flight trajectory along predetermined routes, these trajectories should be smoothed, which is presented in
Section 4.2.2. Such trajectories show only the actual flight profile of the unmanned platform under optimal conditions, i.e., without taking into account a wind force. However, in order for winds to be taken into account, it is necessary to determine the optimal trajectories for the conditions favorable for carrying out the mission.
4.2.1. Trajectory Calculation
In the described problem, we assume that UAV may encounter obstacles modeled in the form of hemispheres on their flight path. To simplify the description in the article, obstacles are modelled in the form of circles, which means that changes in a flight altitude are not included. This means that the task has a constraint in the form: , where means the number of the next waypoint and means the index of the terrain obstacle modeled with a circle.
This type of a constraint is a non-linear one and it requires linearization, as described in Parikshit et al. [
30] and Lin et al. [
31]. To linearize MILP formulation, the non-convex constraint is replaced by a series of linear constraints and binary logical constraints presented in a model formulation (
41)–(
46).
In the further part of the paper, the waypoints () and the obstacles () are modeled in 2D. This does not limit the considerations, but it simplifies the form of the model. Therefore, the variable description means the i-th coordinate of the point t-th and the variable means the o-th obstacle center in 2D.
Model variables:
—optimization goal of the problem,
—UAV position at modeled by a waypoint,
—acceleration at ,
—velocity at ,
—1 if a UAV position is inside the obstacle o for linearization l; 0 otherwise,
—1 if a constraint is active for linearization n and obstacle o at time step t; 0 otherwise.
The value of
indicates an active constraint, which is necessary for a correct formulation of the model. For the task of determining the trajectory to be a linear task, the constraint of the form
should be replaced by four inequalities, one of which is active in subsequent iterations of the algorithm (see the constraints (
41)–(
44)).
Optimization task based on the minimization of the travel time of the UAVs:
subject to:
where:
and
.
Formula (
34) is the cost function that considers the control changes only. The calculations also used the quadratic function of the form given in Formula (
47):
Constraints (
35)–(
36) are linked with an optimization function. They provide that optimization function adds absolute values of control signal values (acceleration). Constraints (
37) and (
38) are system Equations of the UAV. Constraint (
39) ensures that an acceleration and a velocity will not exceed the predefined ranges (they are lower and upper bound constraints of velocity and acceleration). Constraints (
40) are initial and finial state boundary constraints. Constraints (
41)–(
44) are the obstacle avoidance constraints after linearization. Constraint (
45) means that for any obstacle and all of the linearizations for any time step if one
, then the trajectory point is outside the circle. And this is preferred situation, i.e., if all the points are outside the circles, then solution is feasible. Constraint (
46) guarantees that one of the constraints (
41)–(
44) will be satisfied. These four constraints are transformation of the absolute value function (
) derived from
, so only one
can be positive.
4.2.2. Smoothing the Trajectory—UAV Crossing the Waypoint
In order to prepare an efficient path plan, optimal turning approaches must be researched. Every proposed flight order has to be modeled with regard to dynamic limitations of the platform. Otherwise, the quality (cost function) of a path would base on The Euclidean distance. This is very coarse assumption viable only for trajectories, where the turn radius R is at least two times smaller than minimal travel distance between two consecutive waypoints. For realization of a trajectory might require additional maneuvers in narrow turns to reach the required altitude or distance for correct maneuver.
There are analytical algorithms for path planning like Fast Marching (
[
32], which does not consider turning radius and other kinematic boundaries,
[
32]—creates continuous trajectories, but generated values might exceed UAVs limitations. Thus they can be assigned to path planning algorithms in the areas with dense population of obstacles. Different approach is presented in the paper Janjoš et al. [
33] using Quartic Splines an RRTs, but it is defined for a multirotor drone, which carries different dynamic limitation. Adjusting to fixed wing dynamics would affect the quality of the output trajectory.
There are several commonly described algorithms for passing-point maneuvers like: simple past-target turn, which is the simplest one, popular in military aviation, but not intuitive for the planner due to a continual trajectory offset from a line segment directly connecting waypoints; single turn before waypoint (also called “short turn”)—fastest presented by Anderson et al. [
34], but does not pass over a waypoint; 3-turn Dubin curve presented by Noonan et al. [
35] and an algorithm introduced by Anderson et al. [
34], which is close to a given path and optimal but a calculation is more complex. In the paper, the modified version of 3-arc Dubin algorithm is presented.
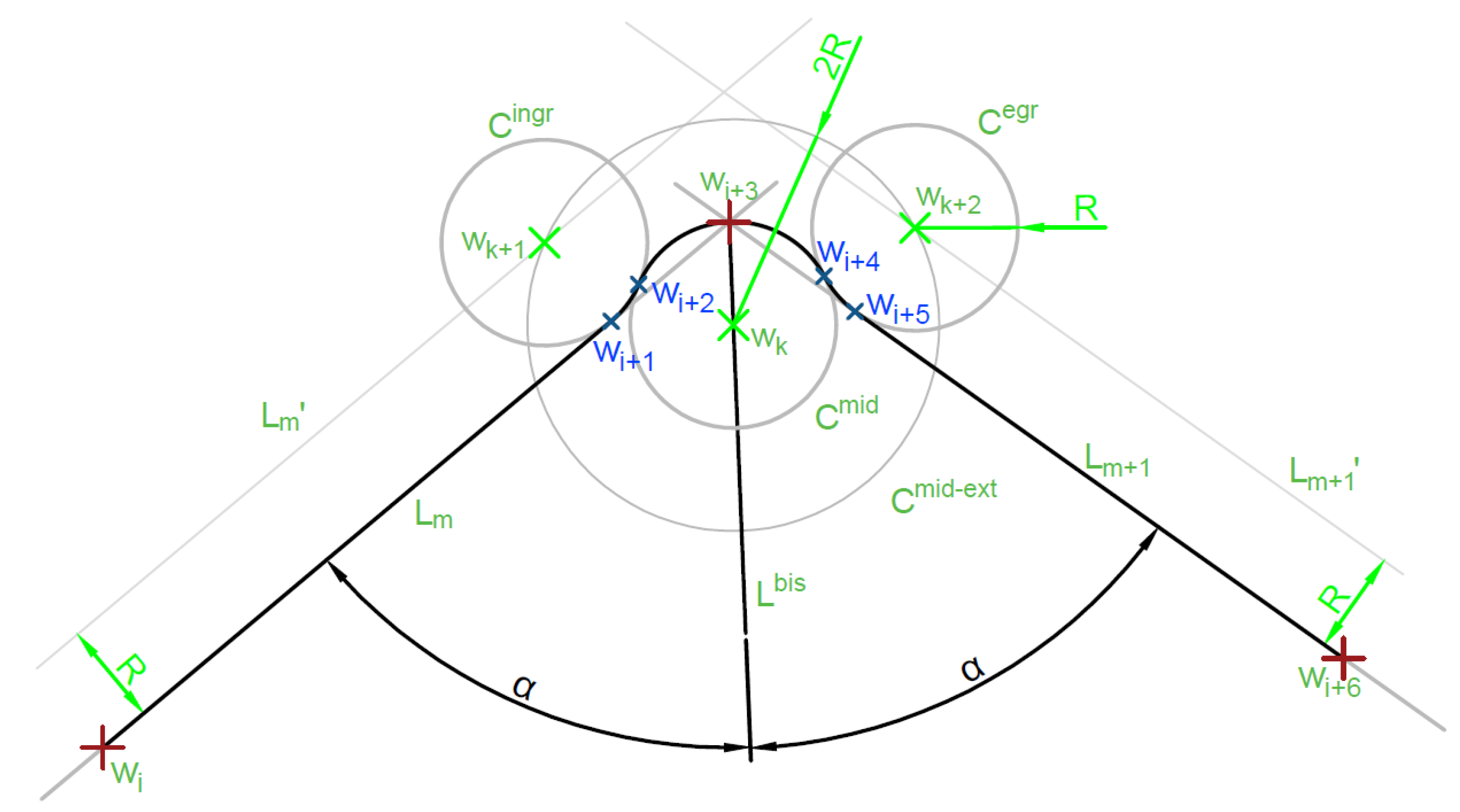
It should be noted that the waypoints generated in the process of determining the flight trajectory, show the optimal UAV flight path. Therefore, after calculations, the number of the route points W increases significantly. But we must keep in mind the UAV maneuverability, so in the process of smoothing the flight path, the number of waypoints is minimized. In this section, for the sake of simplicity and without loss of generality, we assume that the waypoint is described in 2D by the coordinates (x, y).
In the further part, for ease of understanding, an acute or obtuse angle () side is considered to be the inner side of the turn. For there is no need for any maneuver.
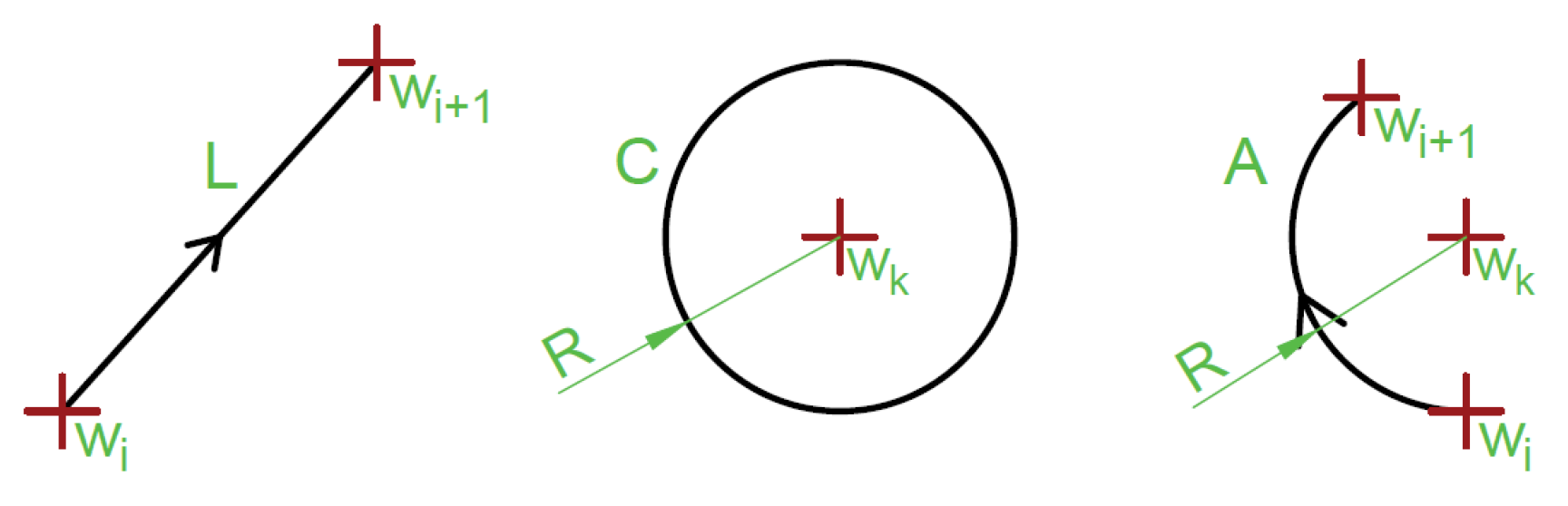
In this paragraph, a set of geometry shapes is described. For the higher description precision will be defined using a symbol and an explicit vector of attributes, except for the points (
w) and the lines (
L) (as their form depends only on the used metrics). The line segment
L is defined by a pair of the waypoints
referred to as
. The circle C is defined by a pair of waypoints and the radius
referred to as
. The circle arc is defined here as a circle and two waypoints corresponding to the ingress and egress points
referred to as
. All definitions are shown in
Figure 8.
The algorithm that determines how the turn will be executed by the UAV that passes through the waypoint is shown in Algorithm 4.
Figure 9 shows graphically how to determine the trajectory in the case of flight through a given waypoint. With this algorithm, the UAV begins turning before the waypoint to minimize the deviation from the optimal flight path.
| Algorithm 4 3-arc Dubin curve calculation |
- 1:
Calculate line going through target and ingress point also through and egress point (line ), - 2:
Calculate 2 lines , equations parallel adequately to and offset by R to the outside of the turn, - 3:
Find bisector line of angle , - 4:
Find point on bisector in distance R to the inner side of the angle, - 5:
Draw circle and , - 6:
Find crossing points and of with adequately , , - 7:
Find points of tangency with − and − , - 8:
Find points and for adequately, - 9:
Draw line segment , arc , arc , arc , line segment .
|
Algorithm 4 has the lowest integral quality index among the described algorithms, which is formulated as
where
is the minimal distance between the calculated trajectory fragment
and
line segments connecting the ingress point with the middle point and the middle point with the egress. Another advantage of this algorithm is its, as previously described, an intuitive trajectory. UAV will be flying on the shortest line segment between two points for most of the time. While the overshoots on the turns will be the lowest from the mentioned maneuver types.
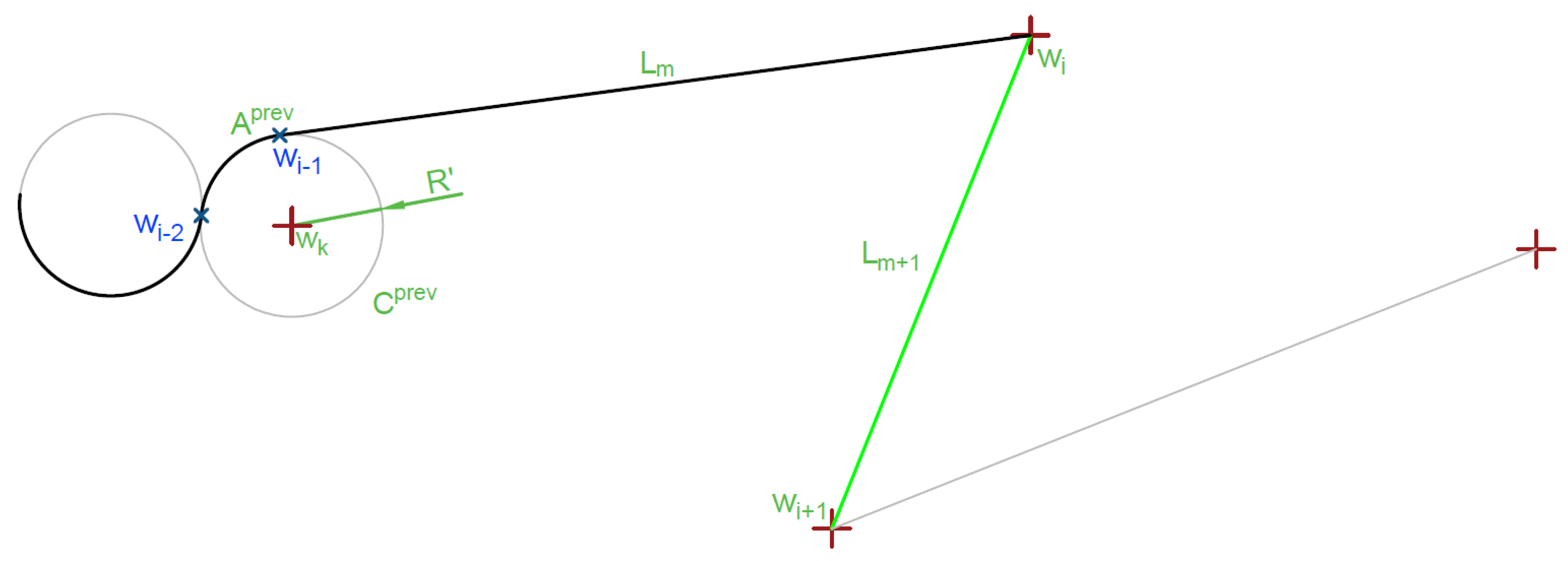
4.2.3. Smoothing the Trajectory—UAV Crossing a Segment
In this algorithm, it is assumed that there was the previous maneuver calculated accordingly to the algorithms described for point (Algorithm 4) and segment targets (Algorithms 5 and 6). This requirement induces the existence of a post-maneuver arc. That allows for creation of a single, universal rule to adjust movement to the next target.
An algorithm for through-line-segment trajectory generation is described in Algorithm 5 and shown in
Figure 10 and
Figure 11.
It is important to note that in case of long distances between waypoints, UAV maneuverability and atmospheric conditions can differ considerably. That is why in this algorithm two separate turn radiuses’ symbols are used. R is the radius for maneuver with current speed and is the radius of the last turn taken (), usually .
For this algorithm, also the direction of an arc has to be defined. Direction defines right (clockwise) and left (counterclockwise) turn type using a classical vector Equation (
49):
Turn is clockwise if dir (
z axis value of vector multiplication) is lower than 0. Turn is counter clockwise for
.
means
should not occur.
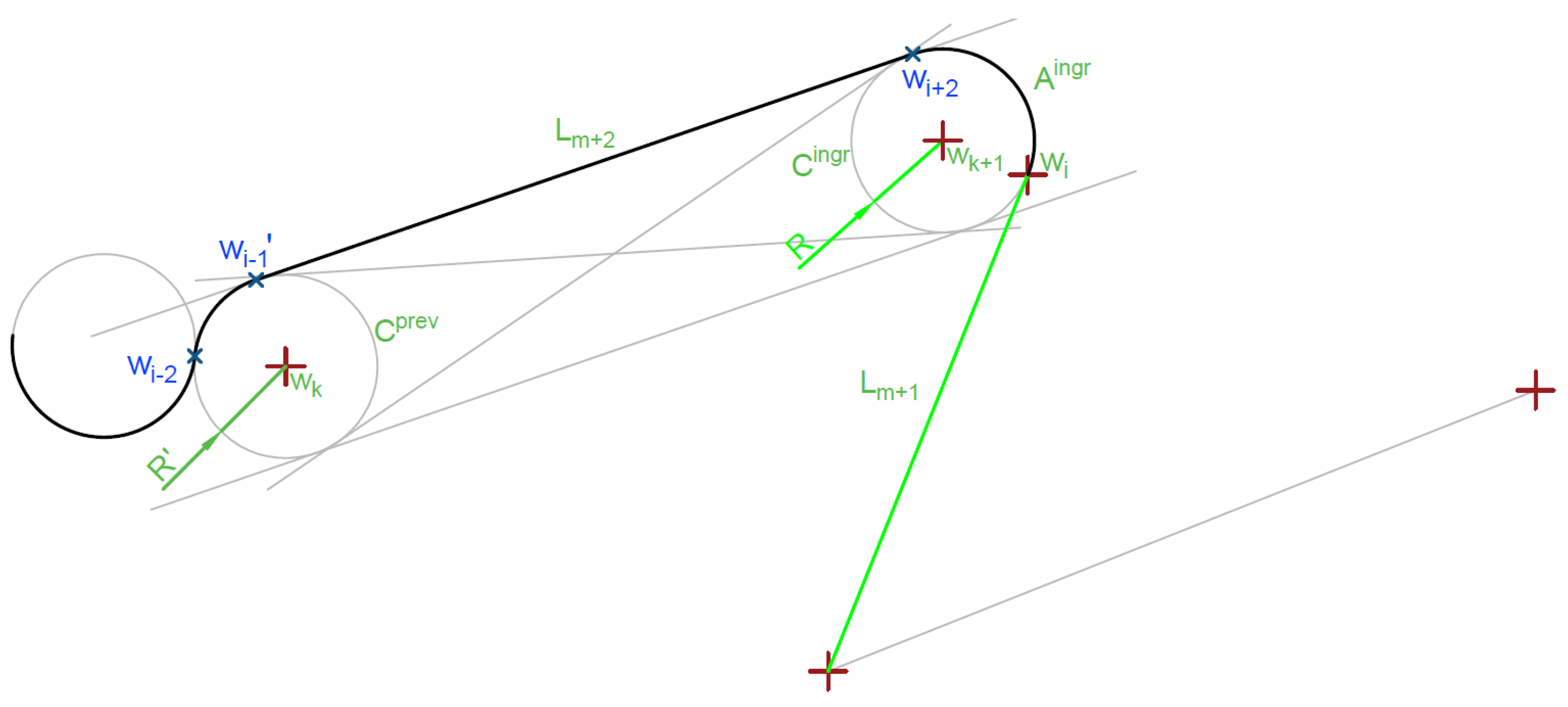
| Algorithm 5 Ingress arc calculation for line segment target |
- 1:
if last maneuver is line segment ( Figure 10) then - 2:
Delete last maneuver (), - 3:
Find circle corresponding to previous maneuver-arc turn () - 4:
Find circle ( ) tangent to the beginning of target line segment ( ) on the side of previous target (shown in Figure 11), - 5:
if distance and direction ≠ direction then - 6:
Replace circle () with tangent to the beginning () of target line segment () on the side further from previous target, - 7:
Find all tangent lines to and , - 8:
Select tangent segment corresponding to direction of both arcs, - 9:
Adjust previous arc () exit point to , - 10:
Add segment to maneuver list, - 11:
Add arc to maneuver list.
|
Algorithm 5 introduces offset between the expected target (beginning of the segment ) and the real target (tangent point on the circle , that is why the previous arc () must be adjusted and the last segment replaced.
In
if condition (line 5), an argument distance is compared to
not
as previous maneuver could be flown with different parameters—described earlier. This condition checks if there is enough space to execute proper maneuvers connecting both curves. If arc’s directions correspond and
(due to a very short distance between arcs, speed cannot change significantly) there will be always 2 tangent segments correctly connecting arcs.
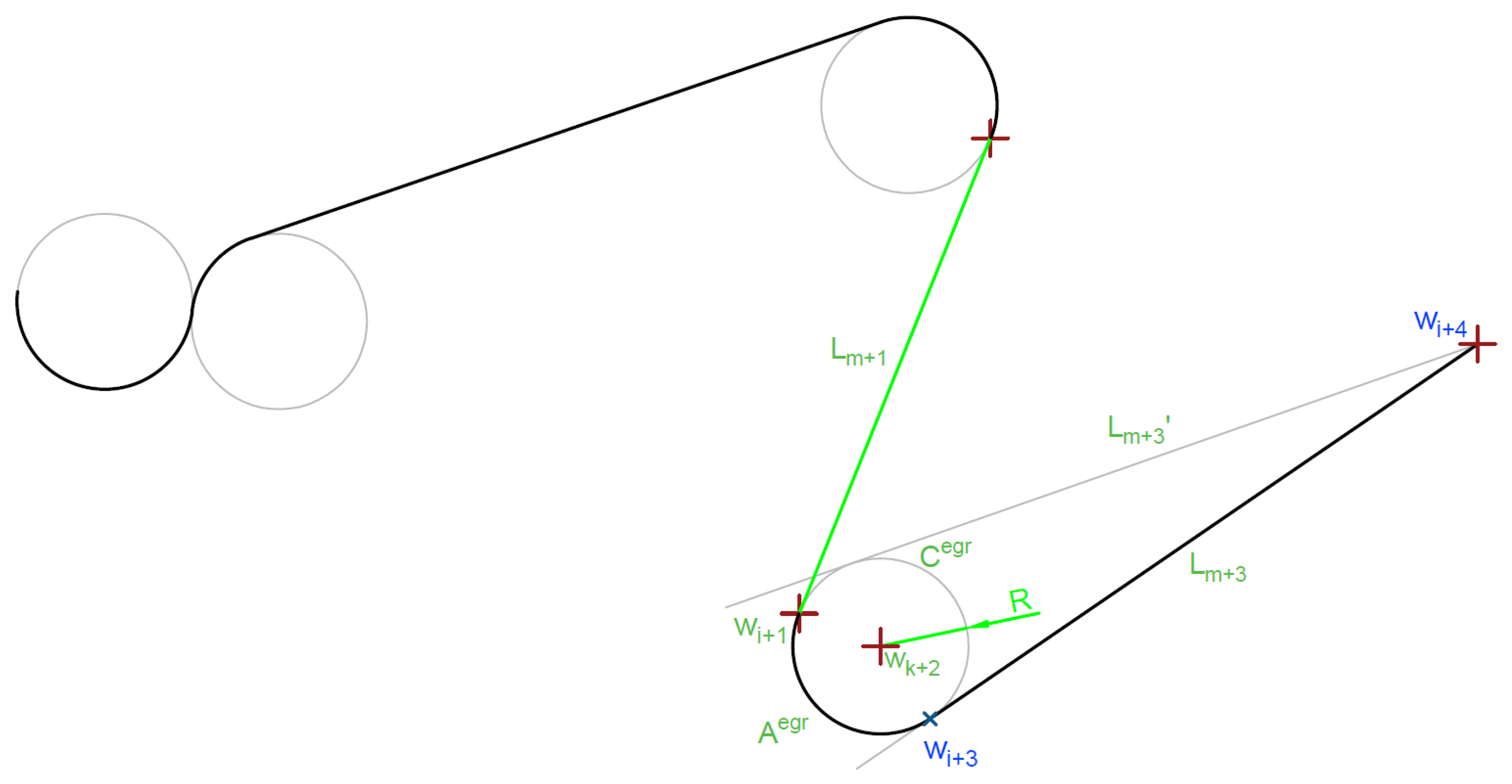
| Algorithm 6 Egress arc calculation for line segment target |
- 1:
Find circle ) tangent to the end ( ) of target line segment on the side of next waypoint ( Figure 12), - 2:
ifthen - 3:
Replace circle () with tangent to the end of target line segment () on the side further from next target, - 4:
Find 2 tangents (, ) to egress circle going through , - 5:
Select tangent segment co-directional with , - 6:
Add arc to maneuver list, - 7:
Add segment to maneuver list.
|
The egress arc Algorithm 6 is simpler because it points at the expected next target, which is precise for the point targets. For the segment target, if needed, will be adjusted as shown in Algorithm 5. If the next mission target requires flight on the line segment
and
, it will be adjusted in the next step as described in Algorithm 5. The algorithm is presented graphically in
Figure 12.
Figure 12.
Single arc out segment curve calculation
Figure 12.
Single arc out segment curve calculation
6. Conclusions
The procedure of determining the flight trajectory for a short-range tactical UAV, described in the article, was actually implemented in one of the projects in which the authors participated. The procedure is a part of the construction of the so-called Mission Plan, which consists of a set of routes that UAV can follow during the mission. In the mission plan, methods of using payload used for reconnaissance are also being developed. From the point of view of the optimization task, which is the preparation of the mission plan, in the case of determining the flight trajectory to recognize a target, one can talk about solving the local task. The global task is to determine a flight plan that ensures recognition of all major targets.
The article discussed an algorithm used for detailed flight route planning, which takes into account the payload installed on the UAV. The optimization algorithm was presented, used to determine the exact flight trajectory. Detailed algorithm for determining the turns in flight was presented also. The latter algorithm belongs to the group of algorithms for plotting a trajectory based on Dubin curves, but it is very easy to implement, unlike many others presented in the literature. The set of algorithms presented allows for the implementation of the flight routing subsystem for one or several UAVs that use payload for target recognition. Therefore, the article contains a complete set of algorithms that allow detailed mission planning on the air platform using available commercial or non-commercial solvers.
Further work is associated with the implementation of methods for dynamic change of a UAV flight plan, which is a difficult task because tactical class systems are not equipped with appropriate number of sensors. In addition, it should be noted that UAV that performs reconnaissance tasks, is not usually integrated with other sources of reconnaissance data. In terms of optimization, especially the graph and network theory, to perform this task, the presented model should be extended with mechanisms for efficient modification of the connection network, i.e., the construction of the so-called ad hoc networks.
The need to expand the presented model with elements of network modification in the ad hoc mode forces the use of video tracking mechanisms in practical operational activities. In this case, the algorithms of the EO/IR alone are insufficient (for SAR, such algorithms are not yet implemented, although researches are ongoing) and the mechanisms of flight route planning should be modified due to the mutual positioning of the UAV and the tracked target.
Considering the dynamics of changes in the battlefield situation and the fact that tactical class UAVs are the outermost operational element, it will be required to increase their recognition capabilities through the use of ELINT electronic reconnaissance subsystems on board UAVs.
It is also worth emphasizing the important issue mentioned in the paper. The issue involves the need to build models for specific classes of unmanned systems. Each optimization model presented in the paper for solving the route planning task and determining flight trajectories concerned a tactical class system. Detachment from the UAV class and its equipment is too much simplification of the problem and usually makes models purely theoretical.
It is only when the flight trajectories are planned in detail for the UAV mission that it is possible to start further tasks related to the location of the unmanned platform in the field in the event of loss of GPS signal. It is currently one of the most strongly developed directions of work in the field of building intelligent flying systems.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















