Detection of Direction-Of-Arrival in Time Domain Using Compressive Time Delay Estimation with Single and Multiple Measurements



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. DOA Detection in the Time Domain Using Single Measurement
2.1. The MF and Its Application to DOA Estimation
2.2. Compressive TDE and Its Application to DOA Estimation
Grid-Free Compressive TDE
3. DOA Detection in the Time Domain Using Multiple Measurements
3.1. Conventional Exploitation of Multiple Measurement for DOA Estimation
3.2. Multiple Measurement for Grid-Free Compressive TDE: Common Time Delay
3.3. Examination of CIR Estimation Using Extended Grid-Free Compressive TDE
3.4. Frequency Shift of a High Frequency Source
4. SAVEX15: Experimental Results
4.1. Low Frequency: 0.5–2 kHz
4.2. High Frequency: 11–31 kHz
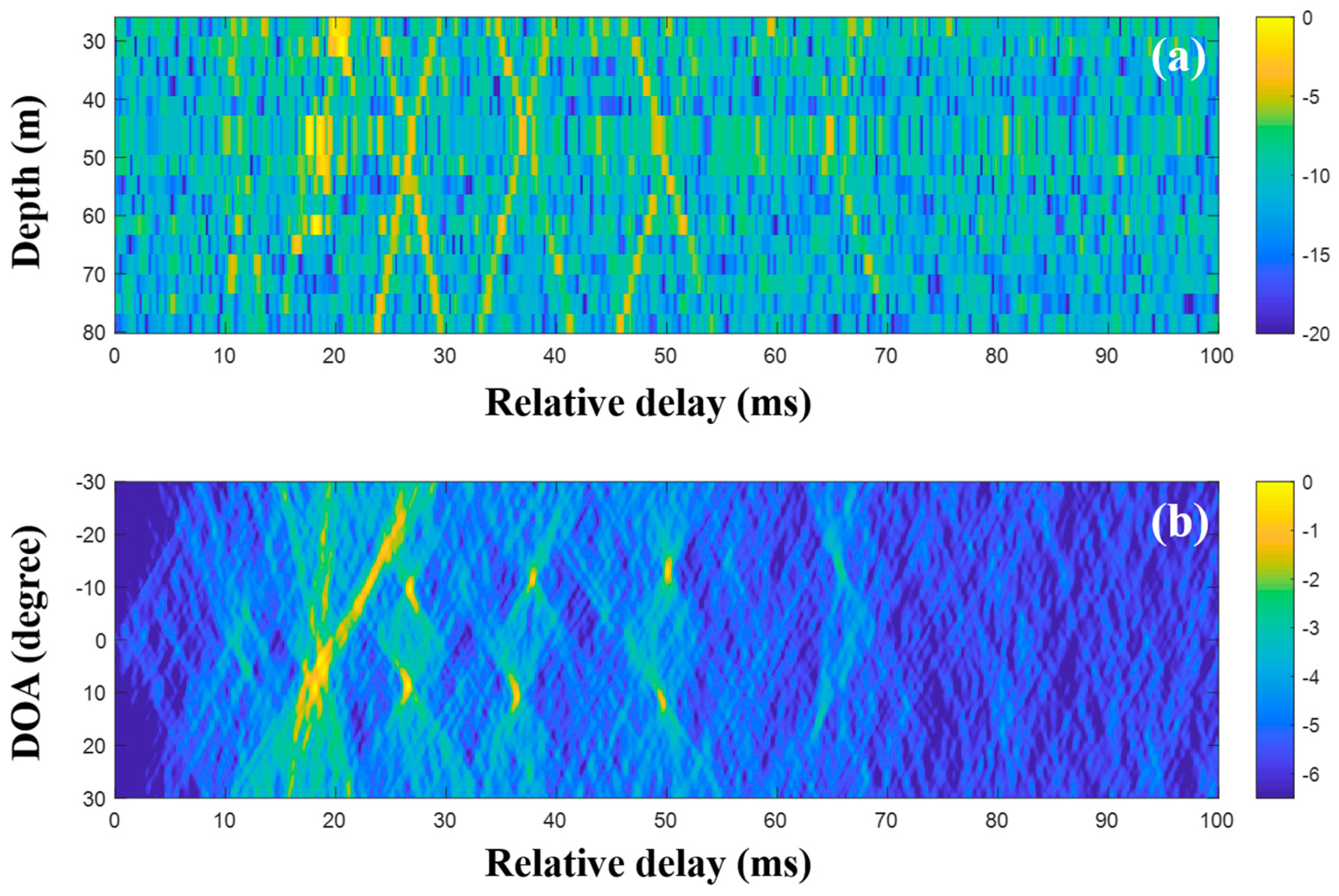
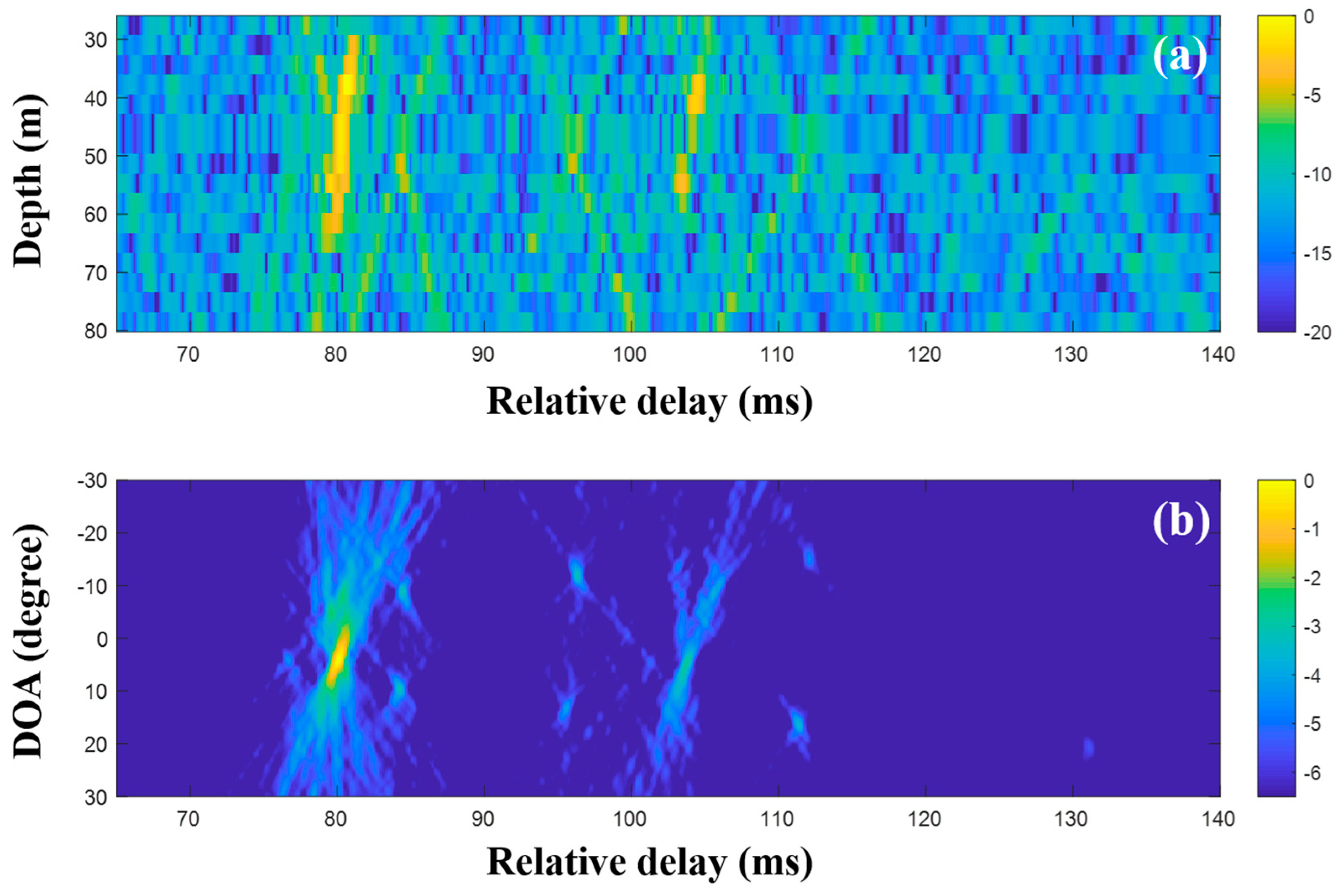
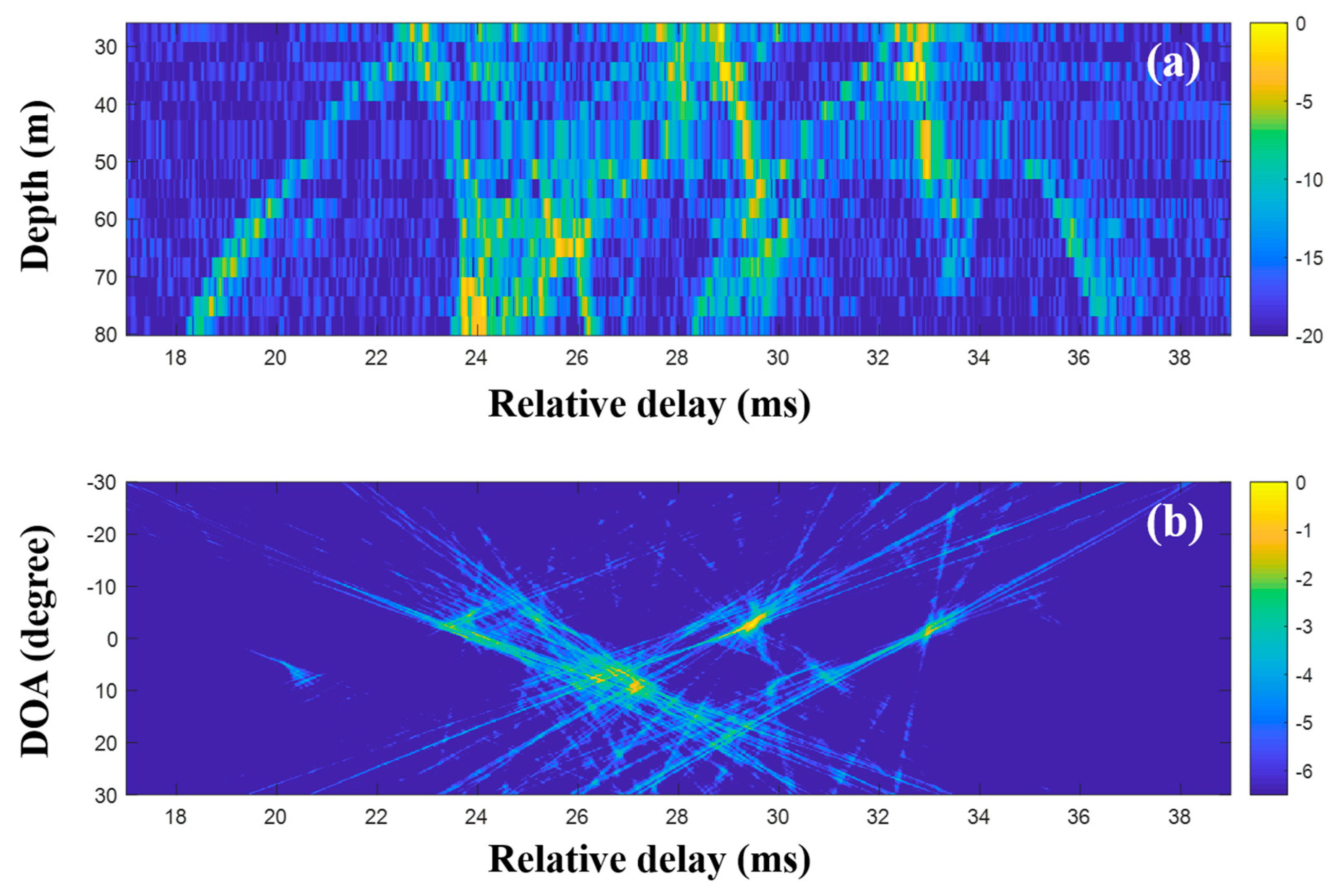
4.2.1. DOA Detection Using MF with Single and Multiple Measurements
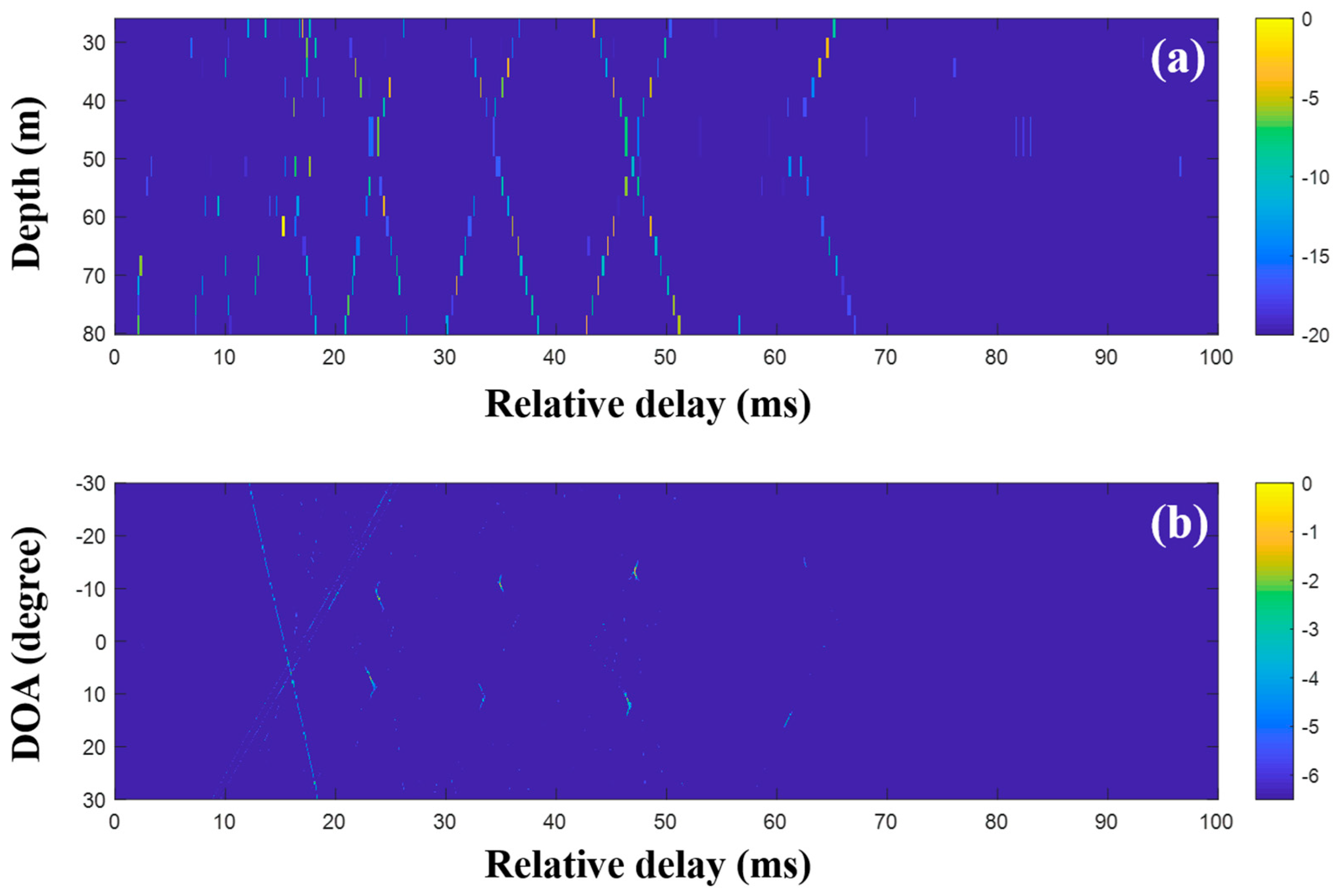
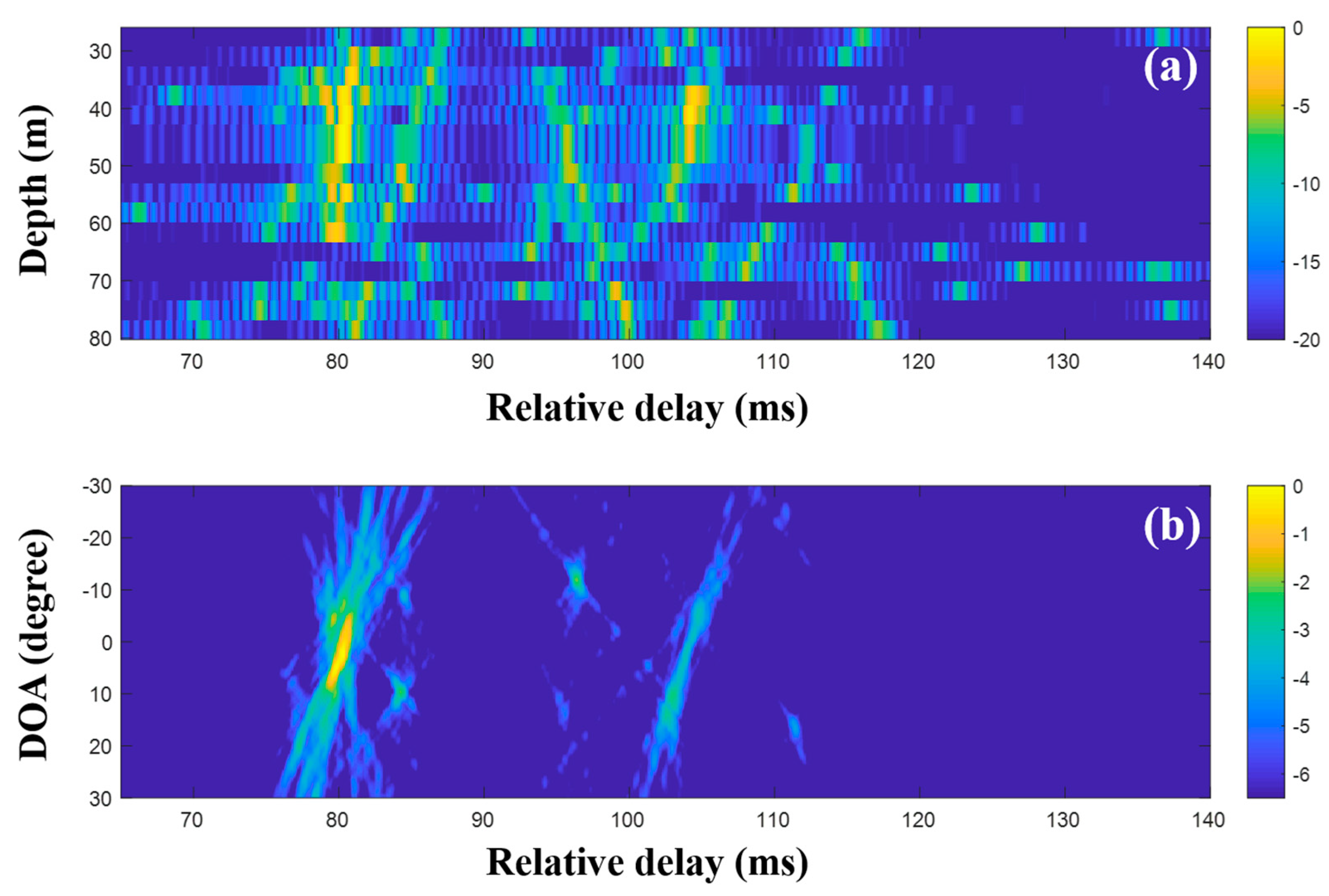
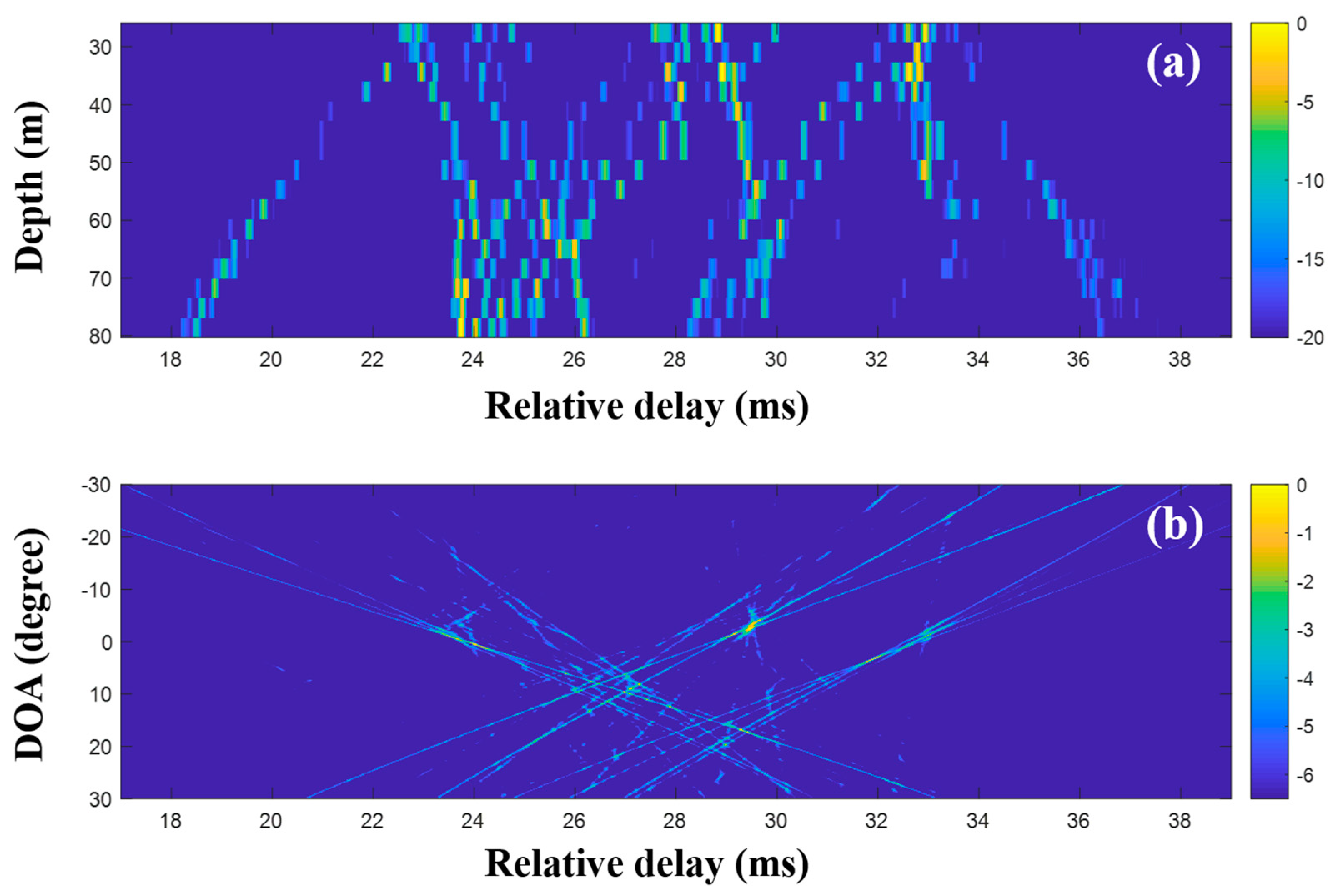
4.2.2. Detection of DOAs Using CS with Single and Multiple Measurements
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jensen, F.B.; Kuperman, W.A.; Porter, M.B.; Schmidt, H. Computational Ocean Acoustics; Springer: New York, NY, USA, 2011; pp. 3–10. [Google Scholar]
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, R.O. A Signal Subspace Approach to Multiple Emitter Location and Spectral Estimation. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 1982. [Google Scholar]
- Gerstoft, P.; Mecklenbräuker, C.F.; Seong, W.; Bianco, M. Introduction to compressive sensing in acoustics. J. Acoust. Soc. Am. 2018, 143, 3731–3736. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Malioutov, D.; Çetin, M.; Willsky, A. A sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Signal Process. 2005, 53, 3010–3022. [Google Scholar] [CrossRef] [Green Version]
- Edelmann, G.F.; Gaumond, C.F. Beamforming using compressive sensing. J. Acoust. Soc. Am. 2011, 130, 232. [Google Scholar] [CrossRef] [Green Version]
- Xenaki, A.; Gerstoft, P.; Mosegaard, K. Compressive beamforming. J. Acoust. Soc. Am. 2014, 136, 260–271. [Google Scholar] [CrossRef] [Green Version]
- Gerstoft, P.; Xenaki, A.; Mecklenbräuker, C.F. Multiple and single snapshot compressive beamforming. J. Acoust. Soc. Am. 2015, 138, 2003–2014. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Candes, E.; Wakin, M.B. An Introduction to Compressive Sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Elad, M. Sparse and Redundant Representations: From Theory to Applications in Signal and Image Processing; Springer: Mew York, NY, USA, 2010; pp. 1–3. [Google Scholar]
- Chi, Y.; Scharf, L.L.; Pezeshki, A.; Calderbank, A.R. Sensitivity to Basis Mismatch in Compressed Sensing. IEEE Trans. Signal Process. 2011, 59, 2182–2195. [Google Scholar] [CrossRef]
- Tang, G.; Bhaskar, B.N.; Shah, P.; Recht, B. Compressed Sensing Off the Grid. IEEE Trans. Inf. Theory 2013, 59, 7465–7490. [Google Scholar] [CrossRef] [Green Version]
- Candès, E.; Fernandez-Granda, C. Towards a Mathematical Theory of Super-resolution. Commun. Pure Appl. Math. 2013, 67, 906–956. [Google Scholar] [CrossRef] [Green Version]
- Candés, E.J.; Fernandez-Granda, C. Super-Resolution from Noisy Data. J. Fourier Anal. Appl. 2013, 19, 1229–1254. [Google Scholar] [CrossRef] [Green Version]
- Fernandez-Granda, C. Super-resolution of point sources via convex programming. Inf. Inference A J. IMA 2016, 5, 251–303. [Google Scholar] [CrossRef] [Green Version]
- Xenaki, A.; Gerstoft, P. Grid-free compressive beamforming. J. Acoust. Soc. Am. 2015, 137, 1923–1935. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Park, Y.; Choo, Y.; Seong, W. Multiple snapshot grid free compressive beamforming. J. Acoust. Soc. Am. 2018, 143, 3849–3859. [Google Scholar] [CrossRef] [Green Version]
- Berger, C.R.; Wang, Z.; Huang, J.; Zhou, S. Application of compressive sensing to sparse channel estimation. IEEE Commun. Mag. 2010, 48, 164–174. [Google Scholar] [CrossRef]
- Ekanadham, C.; Tranchina, D.; Simoncelli, E.P. Recovery of Sparse Translation-Invariant Signals With Continuous Basis Pursuit. IEEE Trans. Signal Process. 2011, 59, 4735–4744. [Google Scholar] [CrossRef] [Green Version]
- Fyhn, K.; Duarte, M.F.; Jensen, S.K. Compressive Parameter Estimation for Sparse Translation-Invariant Signals Using Polar Interpolation. IEEE Trans. Signal Process. 2014, 63, 870–881. [Google Scholar] [CrossRef] [Green Version]
- Byun, S.-H.; Seong, W.; Kim, S.-M. Sparse Underwater Acoustic Channel Parameter Estimation Using a Wideband Receiver Array. IEEE J. Ocean. Eng. 2013, 38, 718–729. [Google Scholar] [CrossRef]
- Park, Y.; Seong, W.; Choo, Y. Compressive time delay estimation off the grid. J. Acoust. Soc. Am. 2017, 141, EL585–EL591. [Google Scholar] [CrossRef]
- Song, H.C.; Cho, C. Array invariant-based source localization in shallow water using a sparse vertical array. J. Acoust. Soc. Am. 2017, 141, 183–188. [Google Scholar] [CrossRef]
- Song, H.; Cho, C.; Hodgkiss, W.; Nam, S.; Kim, S.-M.; Kim, B.-N. Underwater sound channel in the northeastern East China Sea. Ocean Eng. 2018, 147, 370–374. [Google Scholar] [CrossRef]
- Yardim, C.; Gerstoft, P.; Hodgkiss, W.S.; Traer, J. Compressive geoacoustic inversion using ambient noise. J. Acoust. Soc. Am. 2014, 135, 1245–1255. [Google Scholar] [CrossRef]
- Grant, M.; Boyd, S.; Ye, Y. CVX: Matlab Software for Disciplined Convex Programming, Version 2.1. Available online: http://cvxr.com/cvx (accessed on 21 August 2020).
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: New York, NY, USA, 2004; p. 5. [Google Scholar]
- Kwon, S.; Wang, J.; Shim, B. Multipath Matching Pursuit. IEEE Trans. Inf. Theory 2014, 60, 2986–3001. [Google Scholar] [CrossRef] [Green Version]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed Optimization and Statistical Learning via the Alternating Direction Method of Multipliers. Found. Trends® Mach. Learn. 2010, 3, 1–122. [Google Scholar] [CrossRef]
- Park, J.; Seong, W.; Yang, H.; Nam, S.; Lee, S.-W.; Choo, Y. Broadband acoustic signal variability induced by internal solitary waves and semidiurnal internal tides in the northeastern East China Sea. J. Acoust. Soc. Am. 2019, 146, 1110–1123. [Google Scholar] [CrossRef]
- Park, J.; Seong, W.; Yang, H.; Nam, S.; Lee, S.-W. Array tilt effect induced by tidal currents in the northeastern East China Sea. Ocean Eng. 2019, 194, 106654. [Google Scholar] [CrossRef]


















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choo, Y.; Park, Y.; Seong, W. Detection of Direction-Of-Arrival in Time Domain Using Compressive Time Delay Estimation with Single and Multiple Measurements. Sensors 2020, 20, 5431. https://doi.org/10.3390/s20185431
Choo Y, Park Y, Seong W. Detection of Direction-Of-Arrival in Time Domain Using Compressive Time Delay Estimation with Single and Multiple Measurements. Sensors. 2020; 20(18):5431. https://doi.org/10.3390/s20185431
Chicago/Turabian StyleChoo, Youngmin, Yongsung Park, and Woojae Seong. 2020. "Detection of Direction-Of-Arrival in Time Domain Using Compressive Time Delay Estimation with Single and Multiple Measurements" Sensors 20, no. 18: 5431. https://doi.org/10.3390/s20185431