Simulation Platform for SINS/GPS Integrated Navigation System of Hypersonic Vehicles Based on Flight Mechanics



Abstract
:1. Introduction
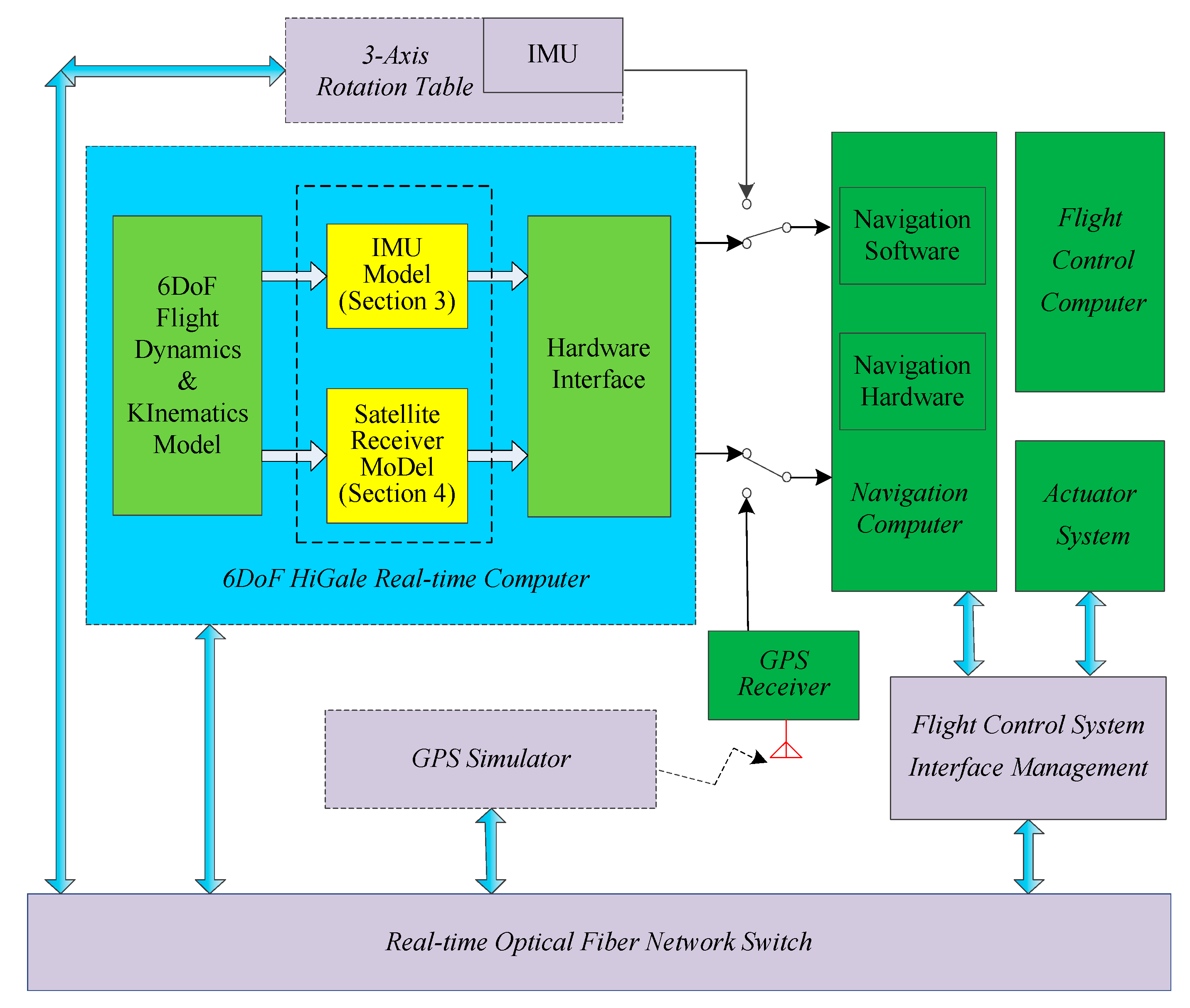
2. Integrated Navigation Simulation Platform
3. Inertial Measurement Unit (IMU) Model
3.1. Theoretical Input of Specific Force and Angular Velocity
3.2. Lever Arm Effects
3.3. Gyroscope and Accelerometer Error Models
3.4. Implementation of Integral Quantification
4. Satellite Receiver Simulation of Integrated Navigation
4.1. Satellite Receiver Simulation of Integrated Navigation
4.1.1. Tight Coupling Data Simulation
4.1.2. Loose Coupling Data Simulation
4.1.3. Geometric Dilution of Precision
4.2. Global Positioning System (GPS) Error
4.2.1. Ionospheric Error
4.2.2. Satellite Clock Correction
5. Simulation Verification
5.1. IMU Data Simulation
 is the output of the accelerometer pulse number. Due to the quantification process, the number of pulses is an integer;
is the output of the accelerometer pulse number. Due to the quantification process, the number of pulses is an integer;  is the accelerometer specific force. Accelerometer pulse equivalent is 0.0001 . The relationship between the number of gyroscope pulses and the angular velocity is depicted in Figure 10. is the output of the gyroscope pulse number and is the gyroscope angular velocity. Gyroscope pulse equivalent .
is the accelerometer specific force. Accelerometer pulse equivalent is 0.0001 . The relationship between the number of gyroscope pulses and the angular velocity is depicted in Figure 10. is the output of the gyroscope pulse number and is the gyroscope angular velocity. Gyroscope pulse equivalent .5.2. GPS Receiver Data Simulation
5.3. Strapdown Inertial Navigation Systems (SINS)/GPS Receiver Data Simulation
5.4. Time Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yan, J.; Yu, Y.; Fan, Y. Control Technology of Air-Breathing Hypersonic Vehicle, 1st ed.; Northwestern Polytechnical University Press: Xi’an, China, 2015; Volume 1, pp. 1–18. [Google Scholar]
- Xu, B.; Shi, Z. An overview on flight dynamics and control approaches for hypersonic vehicles. Sci. China Inf. Sci. 2015, 7, 1–19. [Google Scholar] [CrossRef]
- Bahm, C.; Baumann, E.; Martin, J.; Bose, D.; Beck, R.; Strovers, B. The X-43 A Hyper-X Mach 7 flight 2 guidance, navigation, and control overview and flight test results. In Proceeding of the AIAA/CIRA 13th International Space Planes and Hypersonics Systems and Technologies Conference, Capua, Italy, 16–20 May 2005. [Google Scholar]
- Hank, J.; Murphy, J.; Mutzman, R. The X-51A Scramjet Engine Flight Demonstration Program. In Proceeding of the 15th AIAA International Space Planes and Hypersonic Systems and Technologies Conference, Dayton, OH, USA, 28 April–1 May 2008. [Google Scholar]
- Walker, S.; Sherk, J.; Shell, D.; Schena, R.; Bergmann, J.; Gladbach, J. The DARPA/AF Falcon Program: The Hypersonic Technology Vehicle #2 (HTV-2) Flight Demonstration Phase. In Proceeding of the 15th AIAA International Space Planes and Hypersonic Systems and Technologies Conference, Dayton, OH, USA, 28 April–1 May 2008. [Google Scholar]
- Steffes, S. Real-Time Navigation Algorithm for the SHEFEX2 Hybrid Navigation System Experiment. In Proceeding of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012. [Google Scholar]
- Hu, G.; Gao, B.; Zhong, Y.; Ni, L.; Gu, C. Robust Unscented Kalman Filtering With Measurement Error Detection for Tightly Coupled INS/GNSS Integration in Hypersonic Vehicle Navigation. IEEE Access 2019, 7, 151409–151421. [Google Scholar] [CrossRef]
- Liu, K.; Wu, W.; Tang, K.; He, L. IMU Signal Generator Based on Dual Quaternion Interpolation for Integration Simulation. Sensors 2018, 18, 2721. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, S.; Wang, L.; Wei, B. Modeling and Simulation Method of Flight Trajectory for Ship-To-Air Missile Based on Vector Rotation. In Proceeding of the 2018 2nd International Conference on Data Mining, Communications and Information Technology (DMCIT 2018), Shanghai, China, 25–27 May 2018. [Google Scholar]
- Musick, S.H. PROFGEN-A Computer Program for Generating Flight Profiles; Air Force Avion. Lab: Wright-Patterson AFB, OH, USA, 1976. [Google Scholar]
- Yan, G.M.; Wang, J.L.; Zhou, X.Y. High-precision simulator for strapdown inertial navigation systems based on real dynamics from GNSS and IMU integration. In Proceeding of the China Satellite Navigation Conference (CSNC), Xi’an, China, 13–15 May 2015. [Google Scholar]
- McAnanama, J.G.; Marsden, G. An open source flight dynamics model and IMU signal simulator. In Proceeding of the 2018 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 23–26 April 2018. [Google Scholar]
- Chen, C. Design and Simulation of Trajectory Generator Based on UAV Inertial Navigation System. Radio Eng. 2019, 49, 880–885. [Google Scholar]
- Liu, K.; Wu, W. Trajectory generator for INS/GNSS integration simulation through real flight data interpolation. J. Natl. Univ. Def. Technol. 2018, 1, 20. [Google Scholar]
- Brunner, T.; Lauffenburger, J.; Changey, S.; Basset, M. Magnetometer- augmented IMU simulator: In-depth elaboration. Sensors 2015, 15, 5293–5310. [Google Scholar] [CrossRef] [PubMed]
- Chen, K.; Wei, F.; Zhang, Q.; Yu, Y.; Yan, J. Trajectory generator of SINS on flight dynamics with application in hardware-in-the-loop simulation. J. Chin. Inert. Technol. 2014, 22, 486–491. [Google Scholar]
- Keshmiri, S.; Colgren, R.; Mirmirani, M. Six-DOF modeling and simulation of a generic hypersonic vehicle for control and navigation purposes. In Proceeding of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006. [Google Scholar]
- Chen, K.; Zhou, J.; Shen, F.; Sun, H.; Fan, H. Hypersonic boost–glide vehicle strapdown inertial navigation system/global positioning system algorithm in a launch-centered earth-fixed frame. Aerosp. Sci. Technol. 2020, 98, 105679. [Google Scholar] [CrossRef]
- Zhang, W. Reentry Trajectory Planning and Attitude Control for Hypersonic Glide Vehicles. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, June 2017. [Google Scholar]
- Wu, H.; Zheng, X.; Lin, Y.; Ma, Z.; Jin, Z. Linear Parametric Amplification /Attenuation Without Spring Hardening /Softening Effect in MEMS Gyroscopes. In Proceeding of the 2020 IEEE 33rd International Conference on Micro Electro Mechanical Systems (MEMS), Vancouver, BC, Canada, 18–22 January 2020. [Google Scholar]
- Zhao, W.; Gao, J. The Theoretical Basis of Trajectory & Control of the Launch Vehicle, 1st ed.; China Machine Press: Beijing, China, 2020. [Google Scholar]
- Song, T.; Li, K.; Wu, Q.; Li, Q.; Xue, Q. An improved self-calibration method with consideration of inner lever-arm effects for a dual-axis rotational inertial navigation system. Meas. Sci. Technol. 2020, 31, 074001. [Google Scholar] [CrossRef]
- Tan, Q.; Cheng, Y.; Tang, B.; Zhou, H.; Li, Y. Compensation method of lever arm effect based on multi-accelerometers. IOP Conf. Series Mater. Sci. Eng. 2020, 768, 042052. [Google Scholar] [CrossRef]
- Remondi, B.W. Computing satellite velocity using the broadcast ephemeris. GPS Solut. 2004, 8, 181–183. [Google Scholar] [CrossRef]
- Liu, G.; Guo, J. Real-time determination of a BDS satellite’s velocity using the broadcast ephemeris. In Proceeding of the Fourth International Conference on Instrumentation & Measurement, Harbin, China, 18–20 September 2014. [Google Scholar]
- Arnas, D.; Casanova, D. Nominal definition of satellite constellations under the Earth gravitational potential. Celest. Mech. Dyn. Astron. 2020, 132, 1–20. [Google Scholar] [CrossRef]
- Rapinski, J.; Janowski, A. The Optimal Location of Ground-Based GNSS Augmentation Transceivers. Geosciences 2019, 9, 107. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Zhao, X.; Pang, C.; Feng, B.; Tong, H.; Zhang, L. BDS and GPS stand-alone and integrated attitude dilution of precision definition and comparison. Adv. Space Res. 2019, 63, 2972–2981. [Google Scholar] [CrossRef]
- Rovira-Garcia, A.; Ibáñez-Segura, D.; Orús-Perez, R. Assessing the quality of ionospheric models through GNSS positioning error: Methodology and results. GPS Solut. 2020, 24, 4. [Google Scholar] [CrossRef] [Green Version]
- Cwiklak, J.; Grzegorzewski, M.; Krasuski, K. Influence of the Ionospheric Delay on Designation of an Aircraft Position. Commun. Sci. Lett. Univ. Zilina 2020, 22, 3–10. [Google Scholar]
- Yang, H.; Yang, X.; Zhang, Z.; Sun, B.; Qin, W. Evaluation of the Effect of Higher-Order Ionospheric Delay on GPS Precise Point Positioning Time Transfer. Remote Sens. 2019, 12, 2129. [Google Scholar] [CrossRef]
- Wang, N.; Li, Z.; Yuan, Y.; Li, M.; Huo, X.; Yuan, C. Ionospheric correction using GPS Klobuchar coefficients with an empirical night-time delay model. Adv. Space Res. 2019, 2, 886–896. [Google Scholar] [CrossRef]
- Chen, K.; Shen, F.Q.; Sun, H.Y. Hypersonic Vehicle Navigation Algorithm in Launch Centered Earth-Fixed Frame. J. Astronaut. 2019, 10, 1212–1218. [Google Scholar]
- Zhao, W.H. Terminology of Marine Measurement and Control Technology, 1st ed.; National Defense Industry Press: Beijing, China, 2013; Volume 3, p. 201. [Google Scholar]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| latitude | 34.2° |
| longitude | 108.9° |
| height | 400 m |
| velocity | 0 m/s |
| launch angle | 200° |
| pitch angle | 90° |
| roll angle | 0° |
| yaw angle | 0° |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, K.; Shen, F.; Zhou, J.; Wu, X. Simulation Platform for SINS/GPS Integrated Navigation System of Hypersonic Vehicles Based on Flight Mechanics. Sensors 2020, 20, 5418. https://doi.org/10.3390/s20185418
Chen K, Shen F, Zhou J, Wu X. Simulation Platform for SINS/GPS Integrated Navigation System of Hypersonic Vehicles Based on Flight Mechanics. Sensors. 2020; 20(18):5418. https://doi.org/10.3390/s20185418
Chicago/Turabian StyleChen, Kai, Fuqiang Shen, Jun Zhou, and Xiaofeng Wu. 2020. "Simulation Platform for SINS/GPS Integrated Navigation System of Hypersonic Vehicles Based on Flight Mechanics" Sensors 20, no. 18: 5418. https://doi.org/10.3390/s20185418