1. Introduction
High-speed maglev train is driven by linear synchronous motor and operates without contact with track by electromagnetic force suspension [
1,
2]. In order to realize accurate positioning and speed closed-loop control during driving, the speed measurement and positioning system is necessary to be installed on the maglev train [
3,
4,
5]. The existing speed and position measurement for maglev train include velocity measurement and absolute positioning based on radar [
6,
7], velocity measurement and relative positioning based on cross induction loop [
8,
9,
10], absolute positioning based on query transponder, absolute positioning based on pulse width coding, absolute positioning based on electromagnetic induction, velocity measurement, and absolute positioning based on inductive wireless communication [
11,
12,
13,
14].
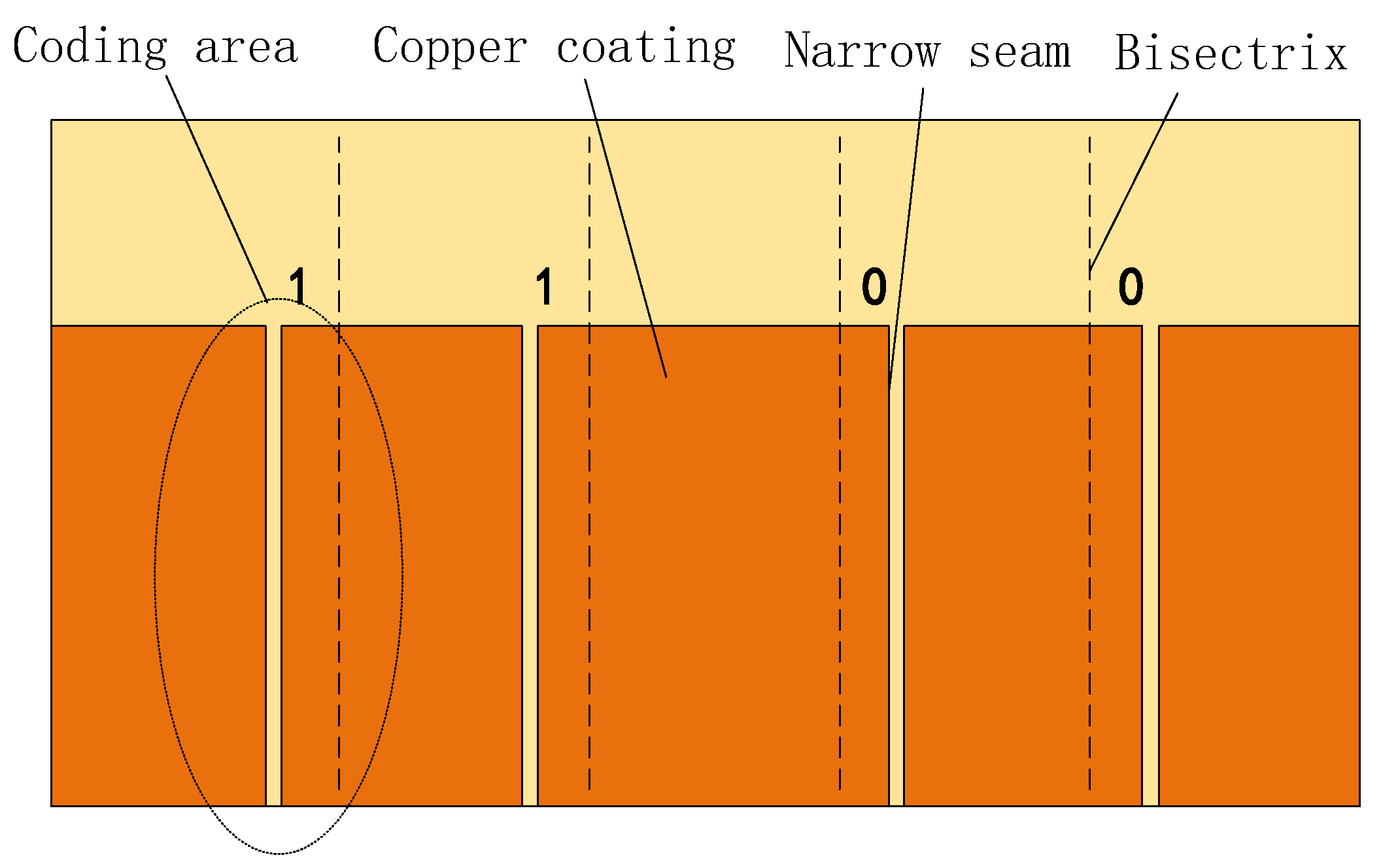
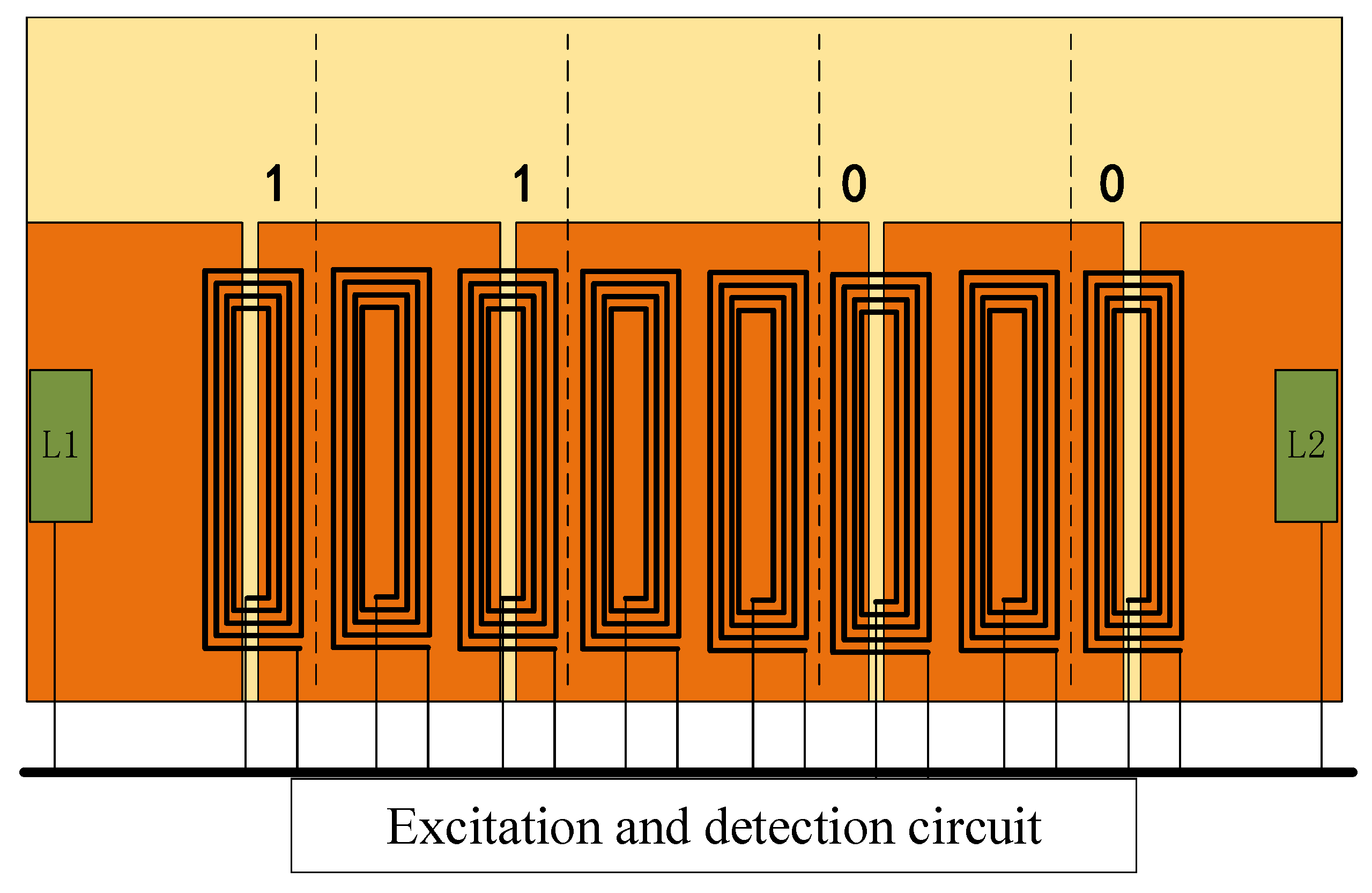
At present, the absolute positioning method based on electromagnetic induction is adopted for high-speed maglev train. Its working principle is to scan the passive position marker plate (hereinafter referred to as the marker plate) along the track through the onboard absolute positioning sensor, so as to obtain the position information [
15,
16,
17]. The position code on the marker plate is realized by special treatment on the copper coating of the marker plate. Each marker plate has a four-bit binary code, and the position of the narrow seam relative to the five-bisector of the marker plate indicates that the bit code is 1 or 0. As shown in
Figure 1, the code is 1100.
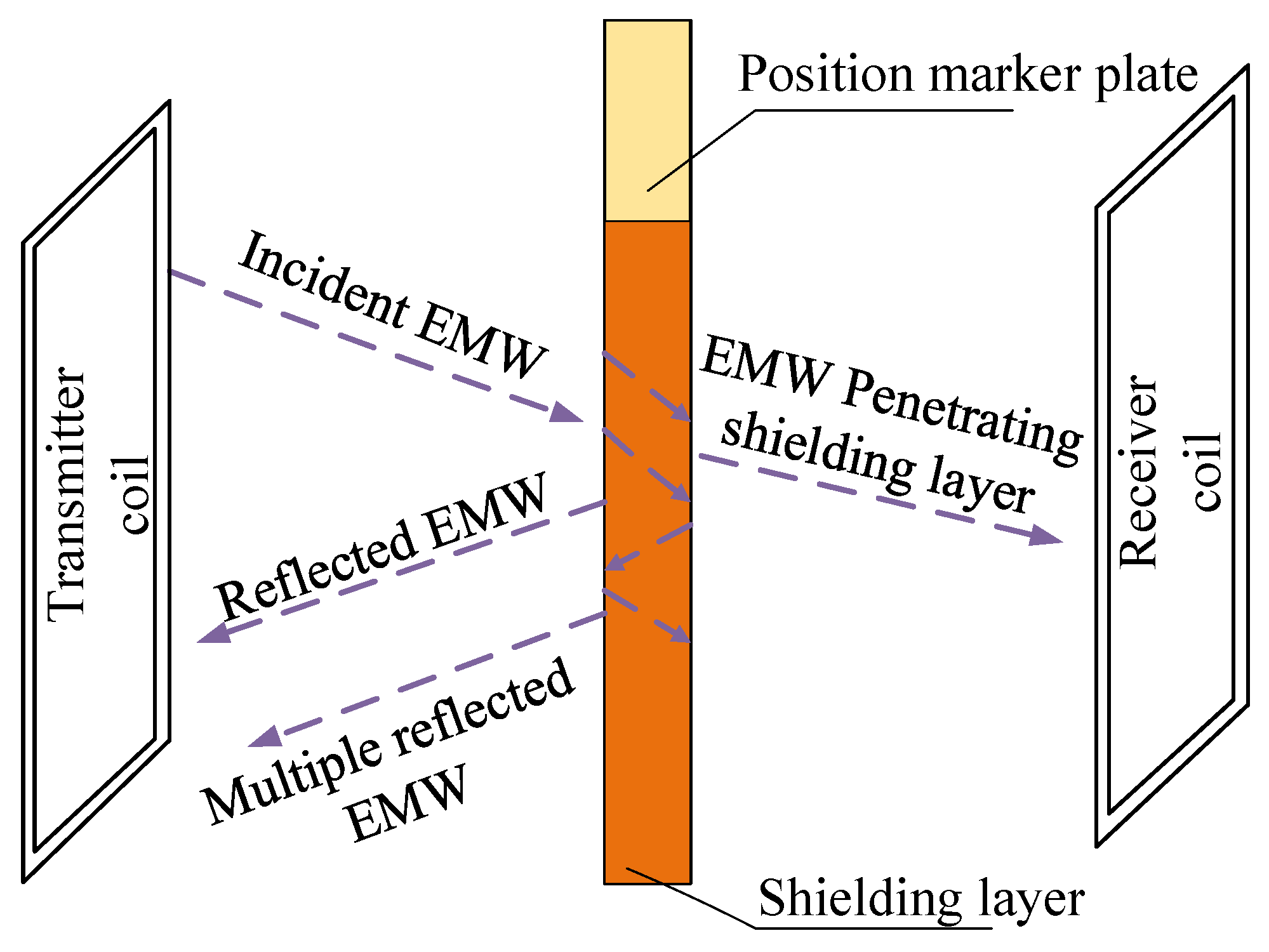
The copper layer of the marker plate can shield the magnetic field. Copper has a high conductivity, and the high-frequency magnetic field can be offset by the eddy current reverse magnetic field generated by the copper coating [
18,
19]. As shown in
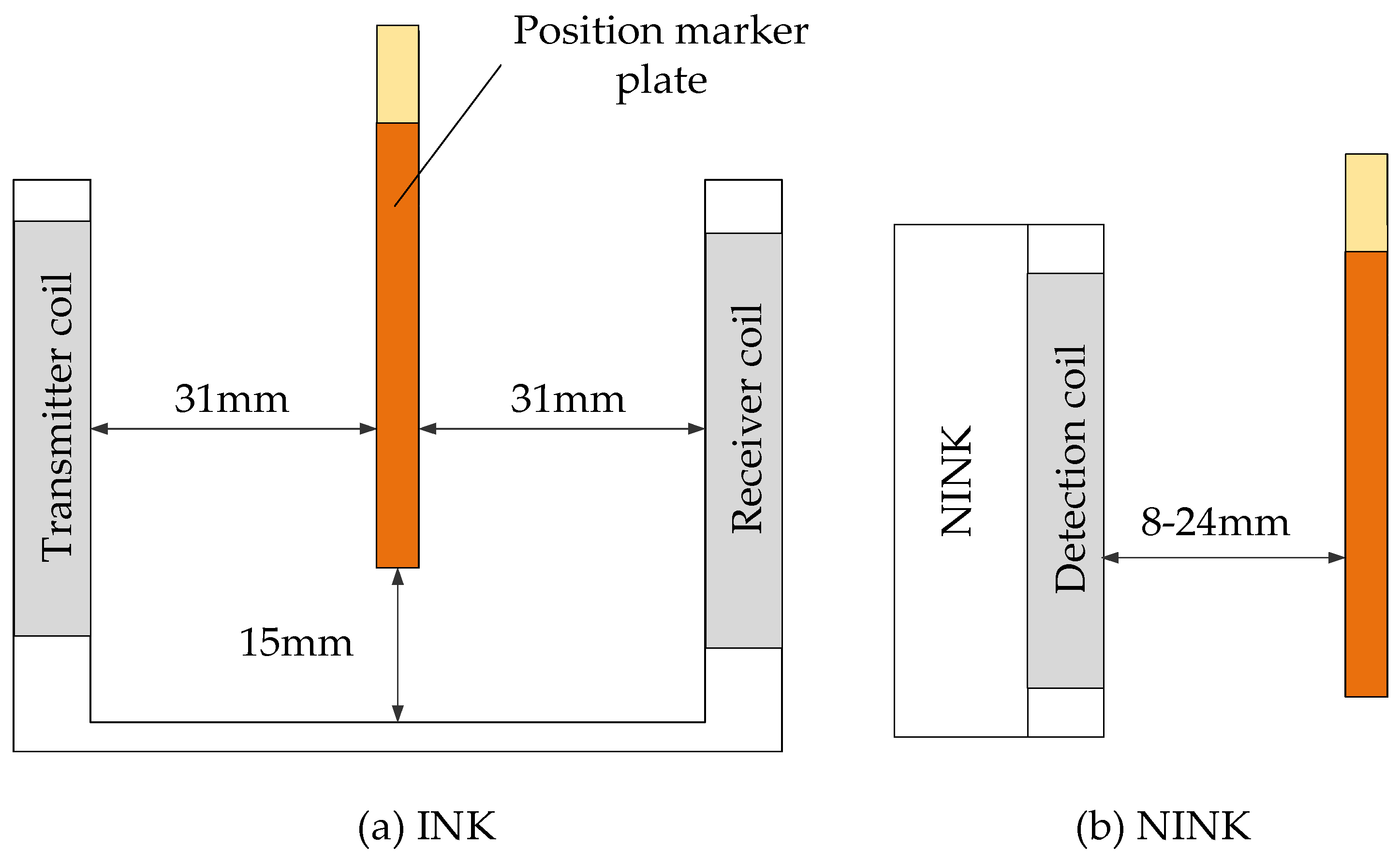
Figure 2, the electromagnetic wave (EMW) emitted by transmitter coil passes through the copper coating layer, the copper coating layer will absorb part of the electromagnetic wave, and the remaining electromagnetic wave will penetrate the shielding layer and be received by receiver coil. As the absolute positioning sensor currently used in high-speed maglev train, INK (the sensor was first developed by Germany, so the German name INK is still used in the field of maglev, which is the abbreviation of INKREFA_Messeinheit in German) uses the transmission detection principle, and adopts symmetrical transmitter coil and receiver coil to transmit and detect electromagnetic wave respectively. In the narrow seam of the marker plate, the incomplete copper coating leads to more electromagnetic wave transmission. Accordingly, the sensor will receive more electromagnetic waves at the seam, so as to identify the seam and read the position code of the marker plate [
20,
21].
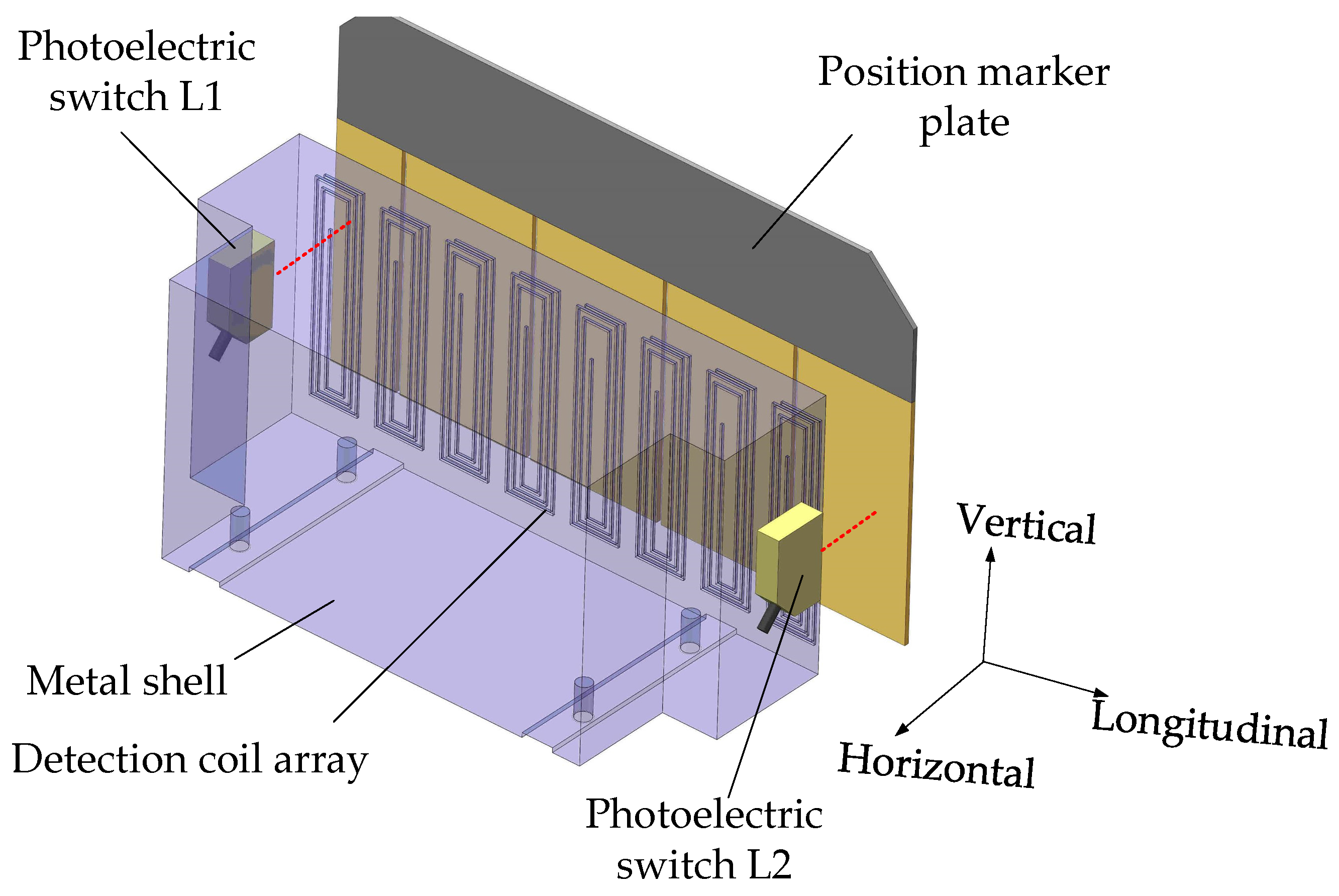
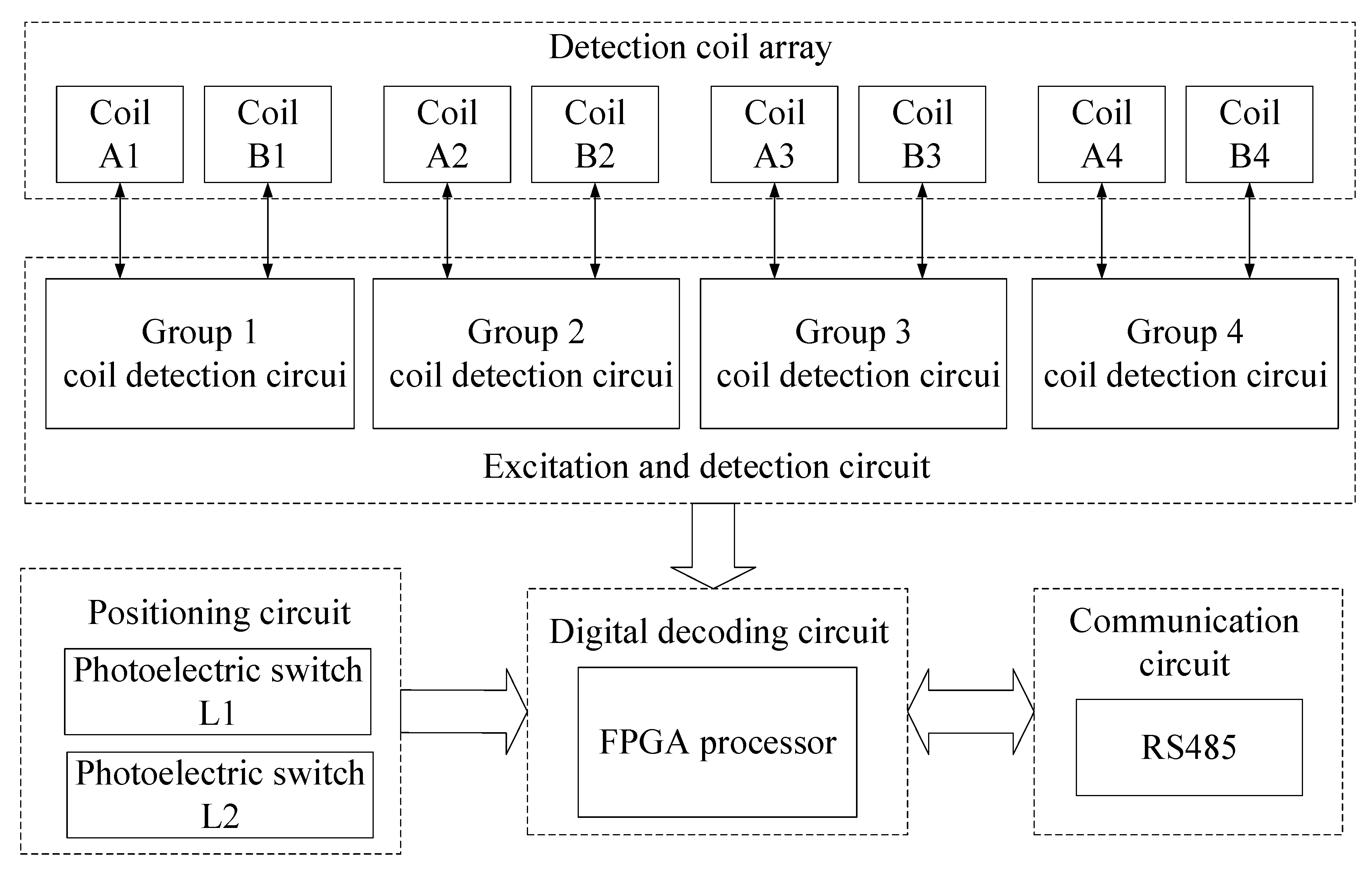
In this paper, a new type of absolute positioning sensor (Hereinafter referred to as NINK, add N before INK to represent the new type) based on eddy current reflection is studied. NINK uses photoelectric switch to position, and four groups of coplanar coils arranged in the same plane are used to detect the eddy current reverse magnetic field of the shielding layer of the marker plate. Therefore, NINK can read the four-bit code of the marker plate at the same time. Compared with INK, NINK changes the coil layout, positioning, and code-reading mode, and reduces the number of coils, so that the sensor has the advantages of simplified structure, small size, and light weight. In addition, it reduces the risk of collision between the sensor and the marker plate. In addition, whether NINK can adapt to the running environment of high-speed maglev trains is the focus of this paper.
The remaining parts of this paper are arranged as follows:
Section 2 introduces the structure and working principle of NINK. In
Section 3, the code-reading reliability index and speed adaptability index are proposed to evaluate the influence of vibration on code-reading result and the influence of speed on code-reading reliability. In
Section 4, the working performance of NINK is tested and analyzed, which verifies the working performance of NINK under the conditions of vehicle suspension and guiding fluctuation. In
Section 5, the platform is used to test the output of NINK at different detection distances and attitude angles, and the comparison is made with INK. At last,
Section 6 concludes this paper.
3. Performance Evaluation Index of NINK
The correct address code output by NINK is very important for train operation and control. When the maglev train is running, the levitation and guidance fluctuation will cause the detection coil of NINK to deviate from the ideal position when reading code, which may cause wrong code-reading. Because the output of NINK has only two states: right and wrong, it can be considered that the output of NINK has no concept of error, so the general performance evaluation index in sensor field cannot be directly applied to NINK. In this section according to the working principle of NINK, two indexes are proposed to evaluate the performance of the sensor, which can assist its design and test. First of all, this section puts forward the code-reading reliability index to evaluate the impact of vehicle body vibration on the reliability of code-reading results. Then, for the positioning error caused by vehicle speed change, the speed adaptability index is proposed to quantify the impact of vehicle speed on code-reading reliability.
3.1. Code-Reading Reliability Index
By comparing the peak voltage of the two detection coils, NINK can determine the relative position of the narrow seam; thus, reading the address code of the marker plate. However, due to the levitation and guidance fluctuation of maglev train during operation, the position of NINK relative to the marker plate is dislocated up and down, and the detection distance changes; thus, changing the equivalent inductance of the detection coil. These influencing factors make the detection result of the sensor uncertain, so the code-reading reliability index is proposed to make a quantitative evaluation of the reliability degree of the detection result.
Let the central line position of coil
A be
, the Central Line position of coil
B be
, the center distance between the two coils be
, and the voltage difference between coil
A and coil
B be
:
The larger the voltage difference
is, the more obvious the feature of the narrow seam is, indicating the sensor has higher code-reading credibility. It is known from experience that the peak value of coil terminal voltage is the highest when the coil is facing the narrow seam, and the lowest when the coil is facing the complete copper coating. As shown in
Figure 9, the position of coil
A facing the narrow seam is
, and the position of coil
B is
, then the maximum value of the voltage difference is
In practice, the voltage difference
may be too small due to the influence of external interference magnetic field, detection circuit error, detection distance or position offset exceeding the limit, etc. If
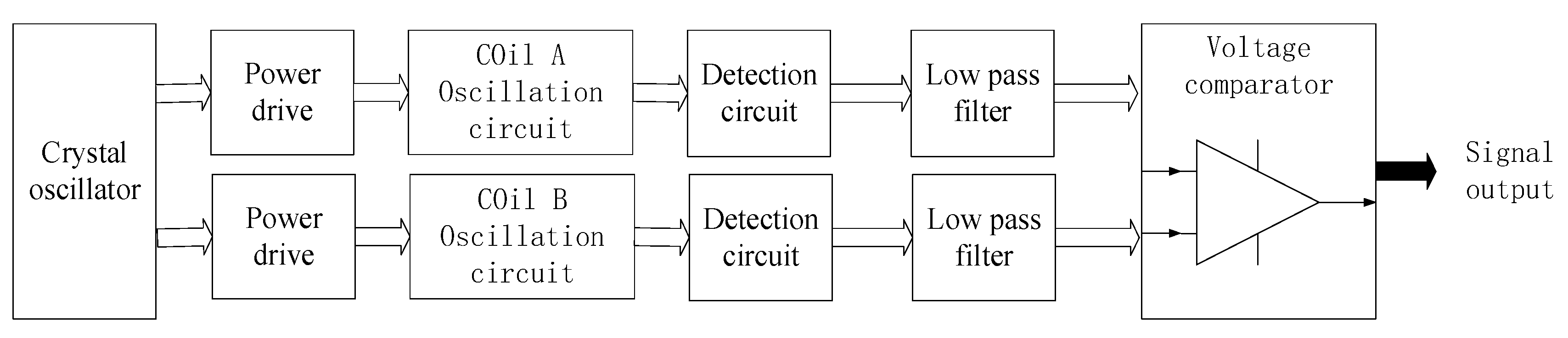
fluctuates near zero, the output of the voltage comparator changes frequently, causing the processor to mistakenly decode. Therefore, NINK uses a voltage comparator with hysteresis characteristics, whose output signal only jumps when
reaches the voltage threshold of the comparator. Using this kind of voltage comparator can compare the voltage state of coil
A and
B more accurately; thus, improving the reliability of the output results. The reliability index of code-reading is defined as
:
where
is the hysteresis voltage of the comparator, and the hysteresis voltage in this paper is 80 mV.
According to Equation (3), greater than 0 indicates that the test result is reliable. The larger C is, the more reliable the reading code is. The larger the , the higher the reliability of code-reading.
3.2. Speed Adaptability Index
The impact of train running speed (detection speed) on code-reading reliability must be considered since NINK is installed on maglev trains. Due to the response time of NINK’s photoelectric switch, oscillation circuit, detection circuit and filter circuit, the delay in code-reading process is inevitable. Because the sensor works in motion state, the system delay can be expressed in spatial scale, which is called geometric delay. The higher detection speed is, the greater the geometric delay will be. Record the geometric delay as
:
where
,
,
are respectively the response time of oscillation circuit, filter circuit, and photoelectric switch.
Geometric delay is manifested as positioning error of NINK, which is the deviation between the actual reading position and the standard reading position. The standard reading position is the position when the center line of the detection coil coincides with the center line of the narrow seam,
causes the actual read position to be ahead of the standard position, while
and
mean that the actual read position lags behind the standard position,
Figure 9 shows the intuitive expression of the geometric delay. The geometric delay causes the detection coil to deviate from the standard read position, which in turn causes the equivalent inductance and terminal voltage of the coil to change. In order to quantify the impact of speed on code-reading reliability, a speed adaptability index,
, is proposed:
In order to meet the maximum detection speed of 600 km/h, speed adaptability index
is specifically defined:
where,
represents the geometric delay of the system when the detection speed is 600 km/h. Considering the dynamic response characteristics of photoelectric switch, oscillation circuit, detection circuit and filter circuit, the total delay of NINK in this paper is about 40 μs, by substituting the total delay into Equation (4), the geometric delay under 600 km/h can be obtained as follows:
When NINK is in the maximum geometric delay, if the ratio of coil voltage difference to hysteresis voltage is large, it indicates that NINK’s code-reading reliability is still high, and it is considered that the sensor has good high-speed adaptability within the detection speed range of 600 km/h.
4. Performance Analysis of NINK
Since the working performance of NINK is affected by train suspension, guidance fluctuation and running speed, the code-reading reliability and speed adaptability indexes proposed in
Section 3 are used to evaluate the working performance of the sensor. In order to analyze the working performance of NINK in the case of vehicle suspension and guidance fluctuation, the equivalent inductance and terminal voltage change of the detection coil are simulated and tested, and the performance is quantified based on the code-reading reliability and speed adaptability index. Finally, the code-reading reliability of NINK under different detection distance and attitude changes is verified by using the test platform.
In the narrow seam position of the sign board, the detection coil works in an asymmetric working state because the detection surface is an incomplete copper coating surface. It is complex to solve the inductance and voltage parameters of the coil by using the analytical method. Therefore, the finite element simulation and actual measurement are used for simple analysis. This paper first simulated the equivalent inductance of the detection coil under different longitudinal positions and detection distances, as shown in
Figure 10. Zero millimeters represents the position where the detection coil is aligned with the narrow seam of the marker plate (the position of coil A in
Figure 9,
), where the equivalent inductance of the coil is the largest. The equivalent inductance is larger when the detection distance is larger, and the equivalent inductance is up to 4.12 μH when the detection distance is 24 mm. In addition, if the detection distance is increased, the curve of equivalent inductance changes with longitudinal position becomes flat.
In order to show the working performance of NINK more intuitively, the actual measurement data are used to explain the change of detection coil voltage with positioning error, detection distance and suspension fluctuation.
Figure 11 shows the variation of the terminal voltage of coil A and B along with the longitudinal position when the detection distance is 10 mm. The two voltage variation curves are arched, which are consistent with the equivalent inductance variation characteristics. In this figure, positions 0 mm and 26 mm (blue dotted line) correspond to positions
and
, respectively, where coil A and coil B have the maximum terminal voltage. However, the terminal voltage of the two coils at 13 mm (green dotted line) is nearly equal, and NINK cannot accurately read the code at this position due to the inability to compare the size of the two voltage.
The voltage variation of coils
A and
B at different detection distances is shown in
Figure 12. Since coil A is facing the narrow seam and coil B is facing the complete copper coating, the voltage of coil A is always greater than that of coil B. Large voltage difference is helpful to identify the narrow seam of the marker plate. When the detection distance is 8 mm, the voltage difference is the largest, so the characteristics of the narrow seam can be fully confirmed. The greater the detection distance is, the closer the voltage of the two coils will be, resulting in the decrease of the code-reading reliability index. When the detection distance is 8 mm, the code-reading reliability is as high as 52, while when the detection distance is 24 mm, the code-reading reliability is less than 5. Obviously, reducing the detection distance can increase the voltage difference and thus increase the code-reading reliability. However, the detection distance should be greater than 8 mm in order to avoid collision between the sensor and the marker plate.
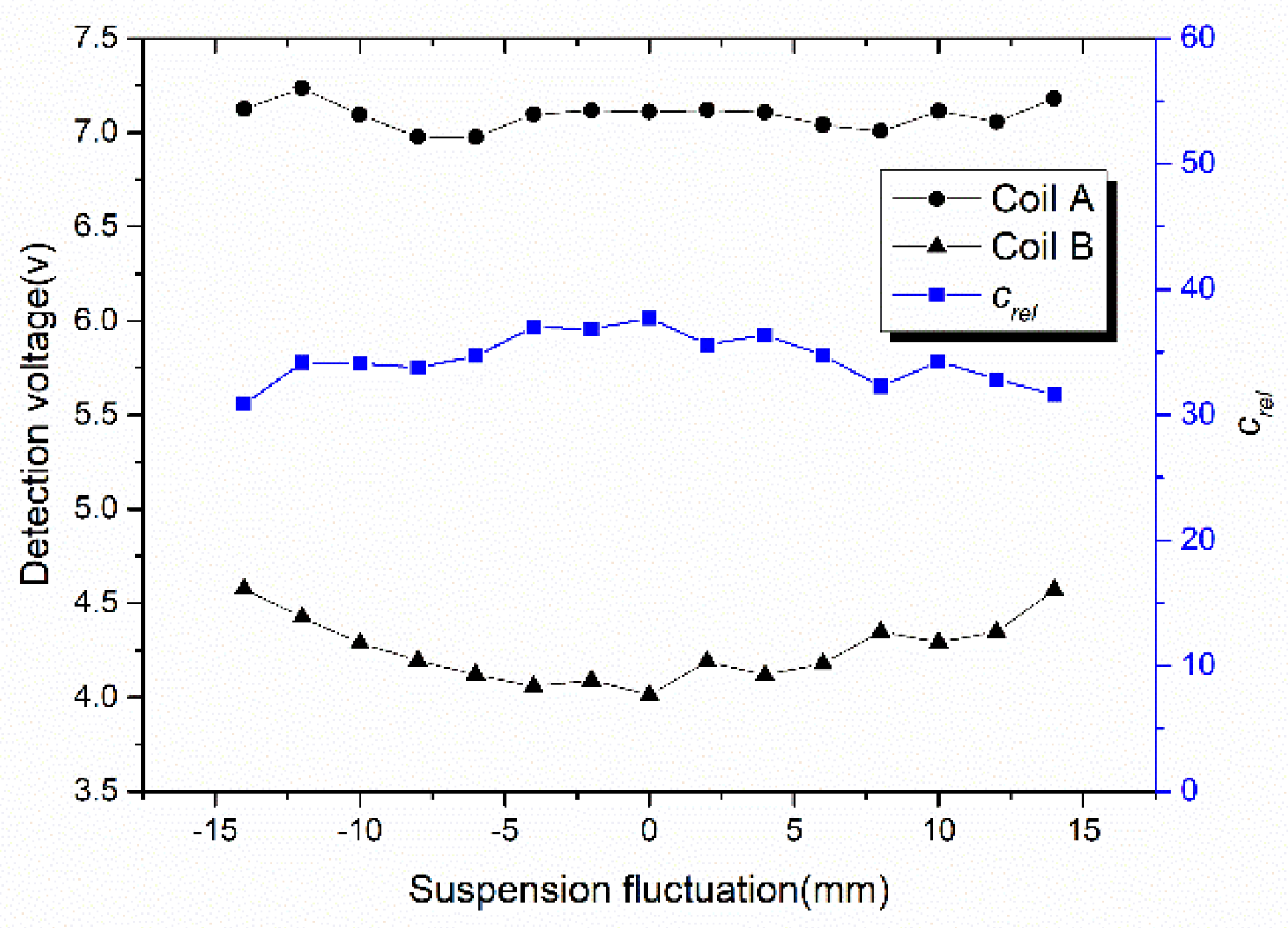
Affected by the suspension fluctuation of maglev train, the terminal voltage change of NINK’s detection coils is shown in
Figure 13. The voltage of the two coils varies little with the suspension fluctuation, but the voltage difference is always large. The code-reading reliability is all higher than 30, which indicates that the sensor is not significantly affected by the suspension fluctuation of the train.
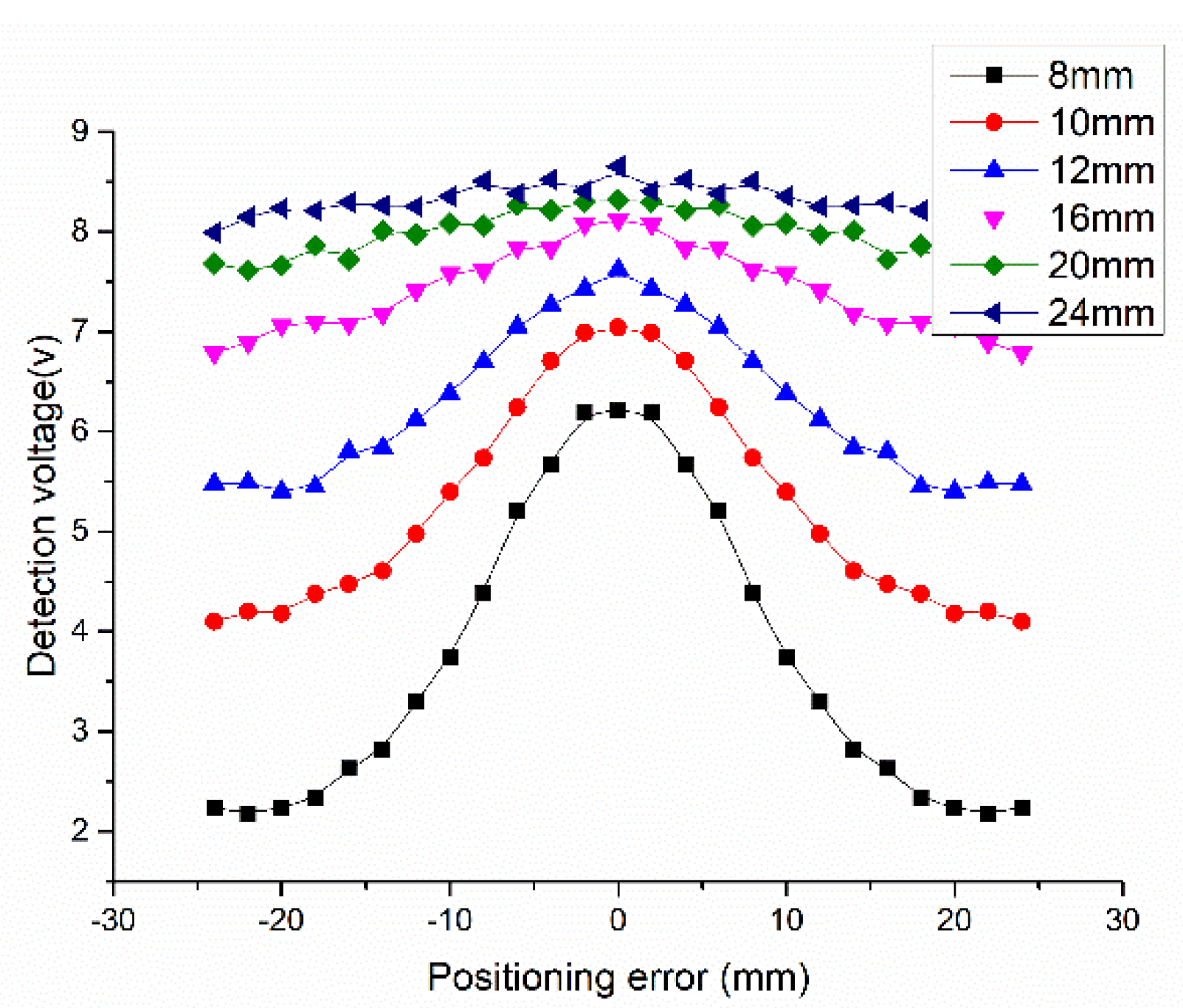
Due to the geometric delay of NINK with the change of speed, different positioning errors are caused.
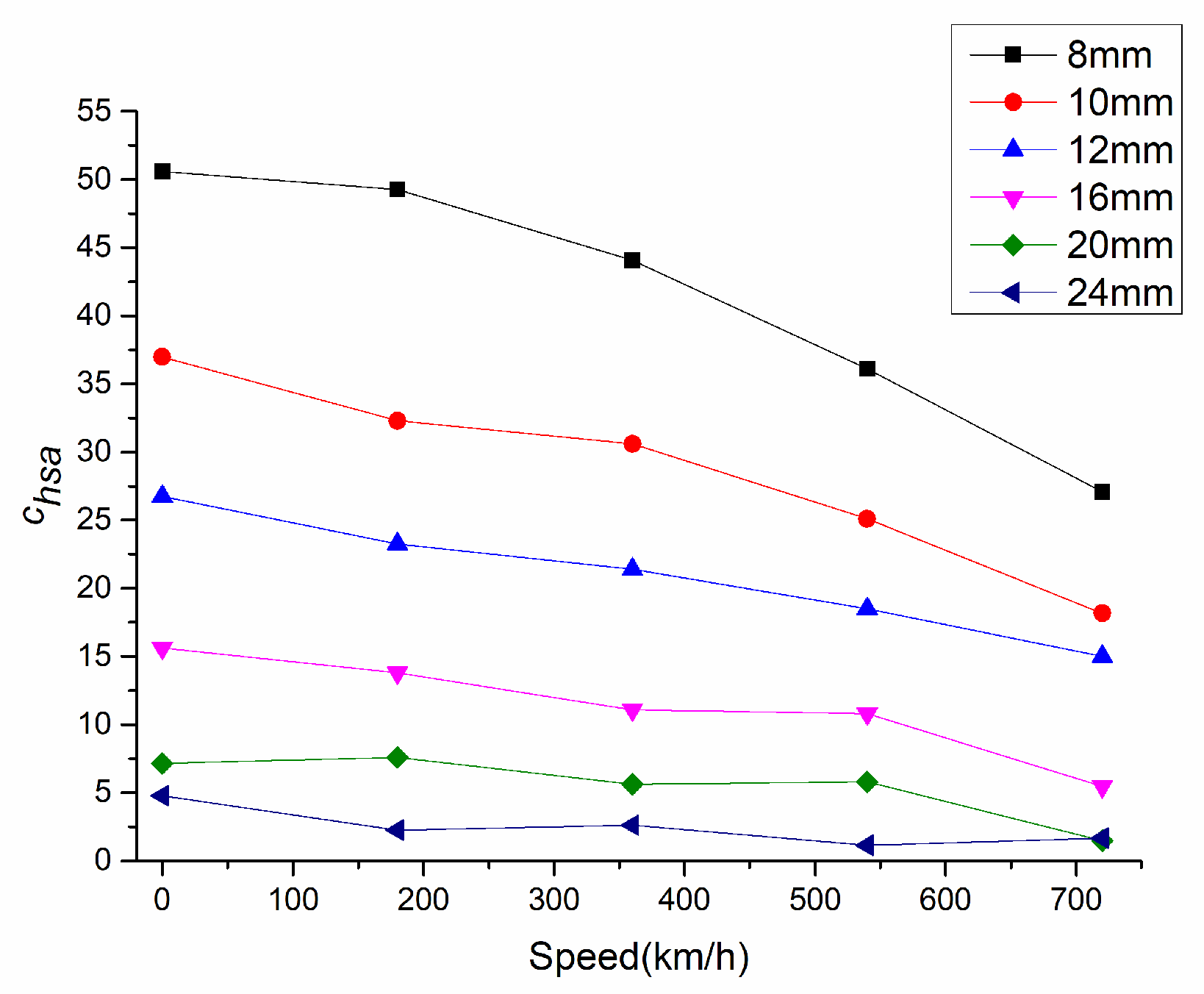
Figure 14 shows the relationship between the positioning error and the terminal voltage of the coil A. When the positioning error increases, the terminal voltage decreases, and correspondingly, the speed adaptability of NINK also decreases at high speed, as shown in
Figure 15. Detection distance has great influence on speed adaptability. At the detection distance of 24 mm, the speed adaptability is lower than five. In this case, although the code can be read correctly, the reliability is not high.
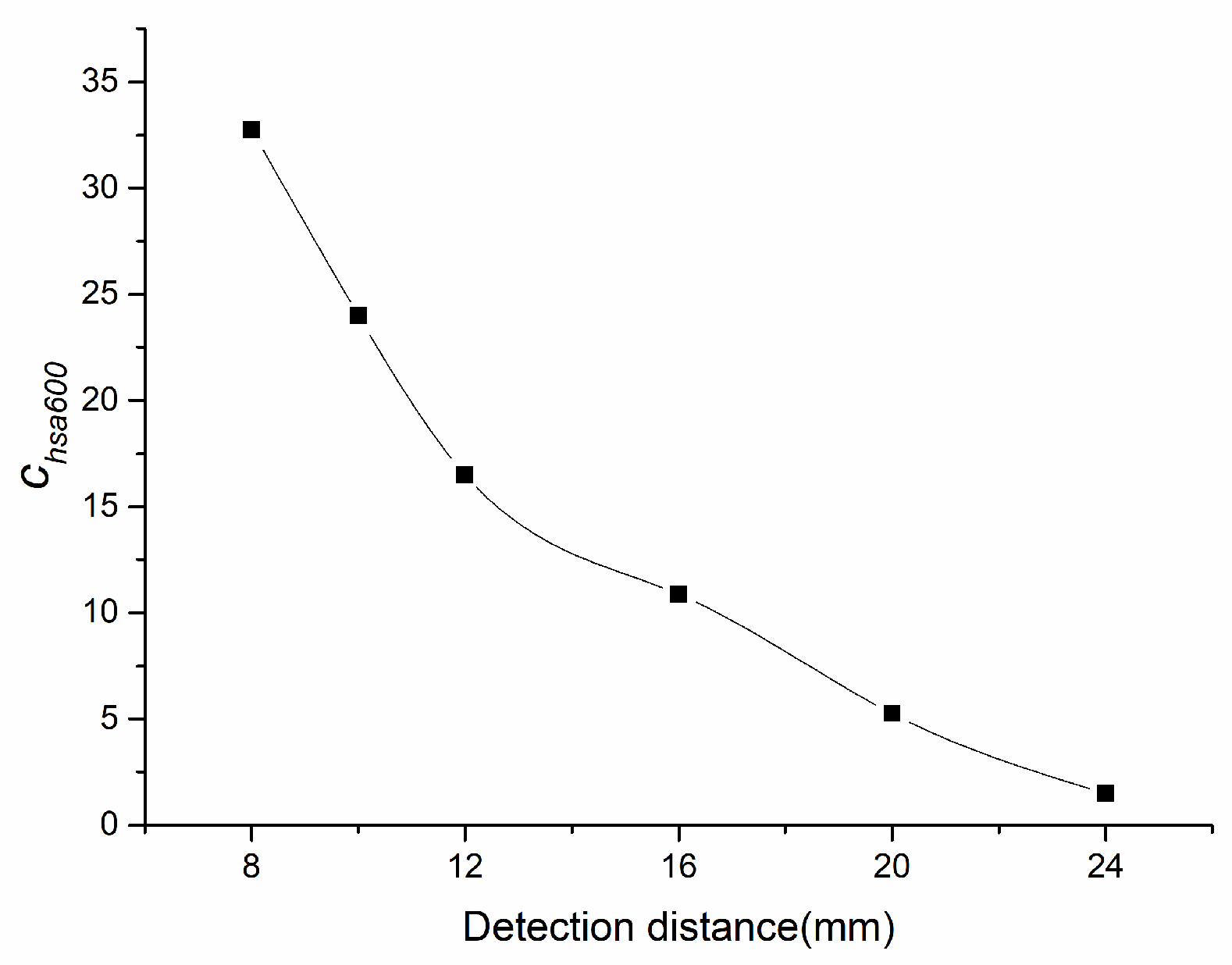
Figure 16 shows the changes of speed adaptability of 600 km/h at different detection distances. The speed adaptability at detection distance of 24 mm is close to one. Therefore, it is considered that the detection distance should not exceed 20 mm.
5. Testing of NINK
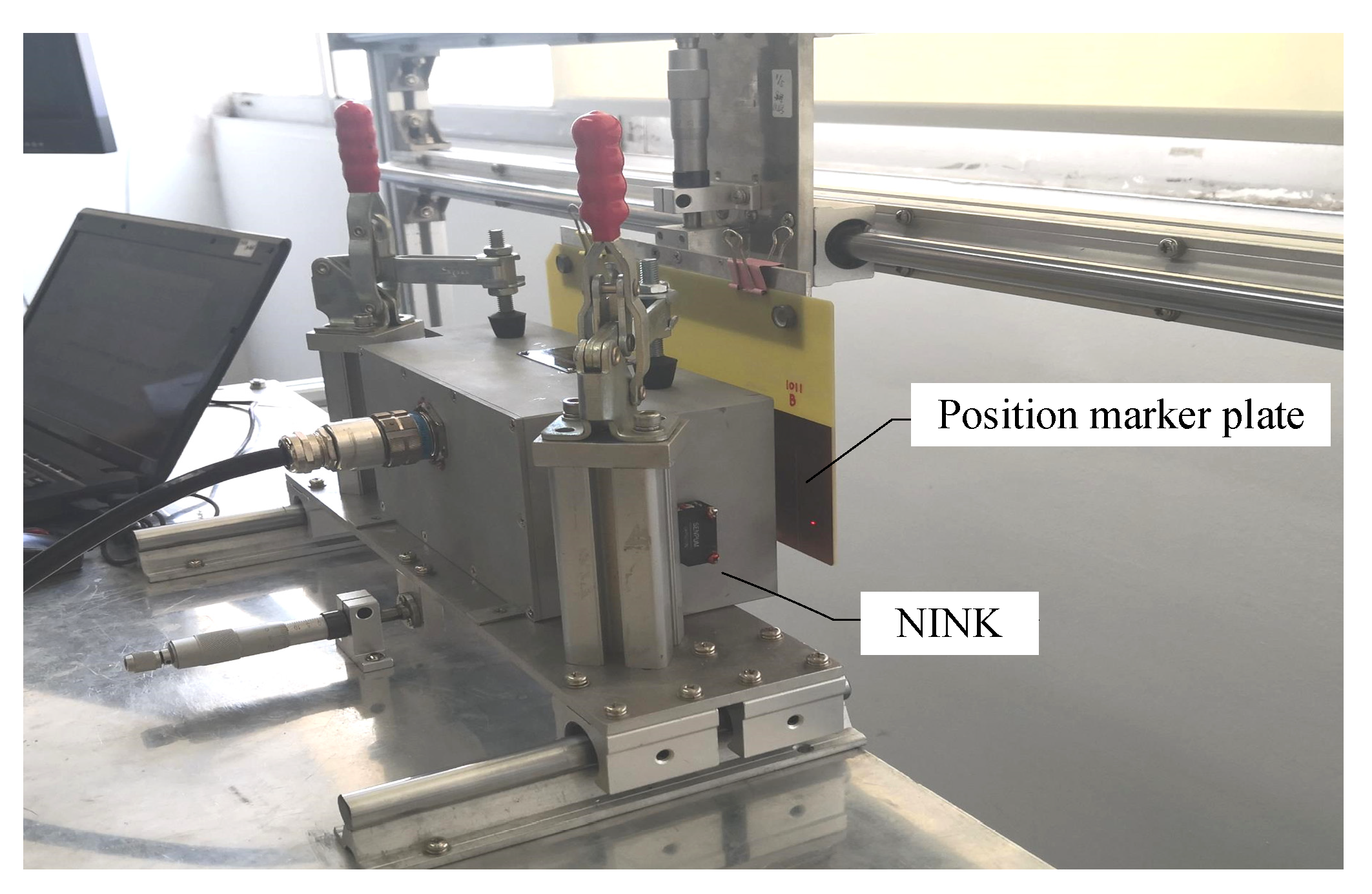
It can be seen from the above analysis that the guidance fluctuation has a greater impact on the code-reading reliability than the suspension fluctuation. In order to test NINK’s performance during train guided vibration, NINK is fixed on the test platform for simulation test, as shown in
Figure 17 (The prototype of NINK is shown in
Figure 18). Change the distance between the marker plate and NINK’s detection surface, test and read the output signal. By comparing with the real code of the marker plate, the result of the sensor is judged to be accurate. Test results for INK are also listed in the table to compare with NINK.
The test results of the two sensors at different detection distance are shown in
Table 1, which shows that NINK can read the code accurately within the detection distance of 20 mm. Since the guidance fluctuation range of the train is ±2 mm, the detection distance of NINK is 10–14 mm correspondingly. Therefore, NINK can meet the requirements of accurate code-reading under normal train operation conditions. Through comparison with INK, it is concluded that the performance of NINK is approximately close to INK.
Whether it can adapt to the change of train attitude is also an important index to evaluate the working performance of NINK. Due to the change of train attitude, the angle between NINK’s detection surface and the marker plate changes, and the detection distance between each coil and the marker plate also changes; thus, affecting the code-reading reliability. In this paper, the test results of NINK under different attitude angles are given directly in
Table 2. Compared with the roll Angle and pitch Angle, the sensor is more affected by the change of yaw Angle. According to the results in the table, NINK can correctly read the code within a yaw Angle of 1° and detection distance of 20 mm. When the yaw Angle is 2° degrees and the detection distance is less than 16 mm, NINK can also read the code correctly. Compared with INK, NINK is more sensitive to the change of train attitude angle. However, as the attitude angle of the train is usually less than 2°, NINK can still work well when the train is in normal operation.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}