1. Introduction
The vehicle active obstacle avoidance system is one of the core issues in the research of autonomous vehicle (AV) control [
1,
2]. A safe and reasonable obstacle avoidance trajectory planning in real time based on accurate obstacle information perception through multiple sensors can promote trajectory tracking technology, which can effectively improve the intelligent level of the autonomous system and reduce the frequency of traffic accidents [
3,
4,
5]. As one of the key technologies of an active obstacle avoidance system for vehicles, the local trajectory replanning refers to designing a safe trajectory that enables AVs to promptly and accurately bypass obstacles based on global path planning [
6]. Under the premise of satisfying multiple constraints, the designed trajectory should also comply with human drivers’ driving characteristics of obstacle avoidance. Therefore, active obstacle avoidance trajectory planning and control have become a difficulty in vehicle lateral control. Determining how to ameliorate the human-like degree of trajectory planning and tracking is the basis for achieving obstacle avoidance control, and is also an effective way for improving the safety and acceptability of AVs [
7].
At present, the methods of local trajectory planning mainly include the fuzzy logic (FL) method, genetic algorithm (GA), neural network (NN) method, A* algorithm, rapidly exploring random tree (RRT), state-space trajectory-generation (ST), and artificial potential field (APF) method. The FL method is combined with the perception action of fuzzy control and replaces mathematical variables with linguistic variables [
8]. Fuzzy control conditional statements describe the complex relationships between variables. Although the accuracy of the designed trajectory is improved, the FL algorithm itself lacks flexibility. The fuzzy rules and membership degree cannot change with the environment. The GA seeks the optimal solution by imitating the mechanism of selection and inheritance in nature, and then plans the trajectory through coding, crossover, mutation, and the construction of fitness function [
9]. However, the programming implementation is relatively complex, and it is difficult to ensure real-time performance. The NN method uses a biologically-inspired NN method to establish an obstacle avoidance trajectory planning model. This method treats each grid as a neuron and the motion space of the vehicle is regarded as a topological NN [
10]. Through training the grid, the parameters of the NN model can be adjusted to adapt to different scenarios. Therefore, the algorithm has good learning ability and stability, though the interpretability of the model is insufficient.
The heuristic search method represented by the A* algorithm has the characteristics of fast calculation speed and good flexibility [
11]. Weight A* and ARA* accelerate the search direction to the target position by introducing and adjusting the weight value of the heuristic function [
12]. A*-Connect adopts a bidirectional search strategy to obtain higher search efficiency [
13]. Hybrid A* uses the variant of the A* search to plan trajectories that conform to kinematic constraints based on the three-dimensional motion state space, achieving local optimization through numerical nonlinear optimization [
14]. By considering the vehicle motion direction information and the forward and backward movement patterns, a four-dimensional search space is constructed through this algorithm. The RRT method is an efficient planning method in multi-dimensional space [
15]. RRT* adopts the tree node in the neighborhood with the lowest total generation value as the parent node, and reconnects the tree nodes in the neighborhood in each iteration, allowing the path on the random tree to always be progressively optimal. Informed-RRT* establishes an ellipsoid with the initial point and the target point as the focus [
16]. This ellipsoid is employed as the search domain to gradually optimize the path, and the area of the ellipsoid decreases during the search process. Finally, the ellipsoid converges into the optimal path. Reachability-guided RRT reduces the sensitivity of systems with different constraints to random sampling for measurements in the extended tree, and it is only possible to select the node when the distance from the sampling point to the node is greater than the distance from the sampling point to the accessible set of the node [
17]. Continuous-curvature RRT adopts a target-biased sampling strategy, a node connection mechanism based on a reasonable metric function, and a post-processing method that satisfies vehicle motion constraints to improve the speed and quality of planning [
18].
The APF method was first proposed by Khatib in the study regarding the obstacle avoidance trajectory planning of robots [
19]. It has the characteristics of a small amount of calculation, short planning time, and high execution efficiency. In recent years, it has been gradually applied to the local trajectory planning of intelligent vehicles [
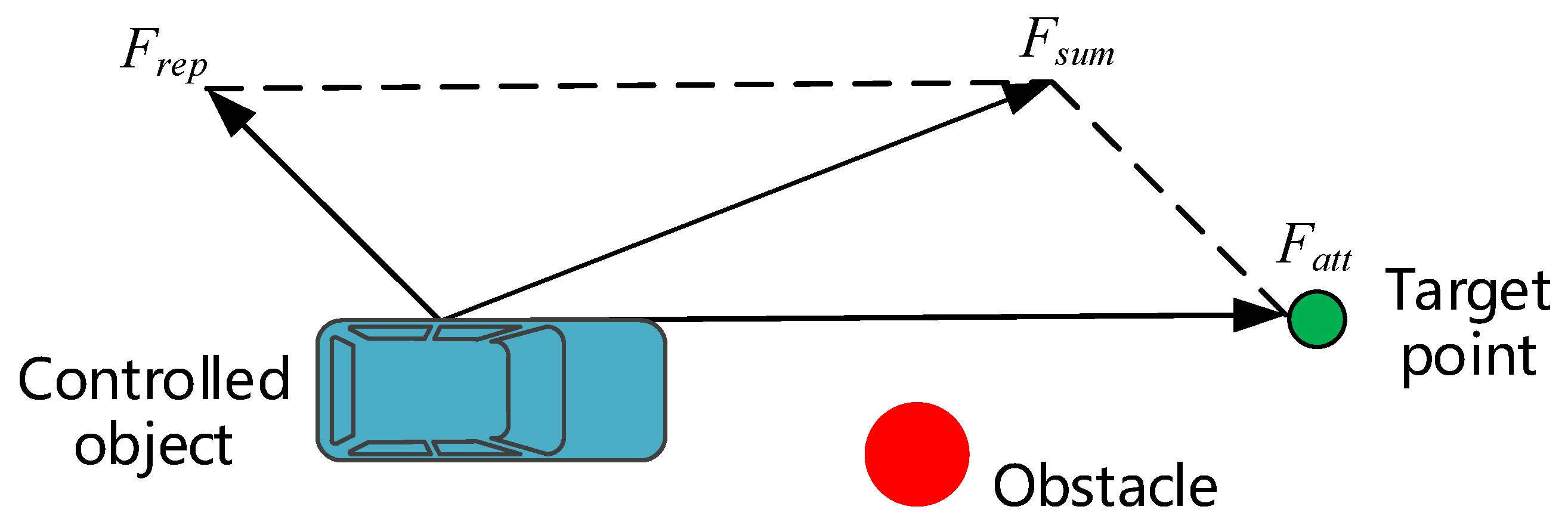
20]. The basic theory is to establish an obstacle repulsive potential field and a target point gravitational potential field through the sensor’s perception of the environment, as well as to find the descending path of the total potential field as the obstacle avoidance path in the compound potential field [
21]. However, the traditional APF method has problems such as local minimum points, and the obstacle avoidance trajectory planning for the robot does not consider the robot’s own size range and boundary environment. The intelligent vehicle’s obstacle avoidance is also constrained by the size of the vehicle and obstacles and the road boundary [
22]. In addition, the planning trajectory should also meet the actual dynamic and kinematic constraints. Therefore, the traditional APF method needs to be improved to satisfy the need for trajectory planning for AVs. Tokson et al. [
23] used the gradient descent algorithm of the potential field to find an effective path in the potential energy field, and added repulsive potential energy when the vehicle failed into a minimum point, to construct a modified potential field to make the controlled object continue to move towards the target point. Bounini et al. [
24] proposed the concept of the steering potential field. The steering potential field is established by issuing steering commands to intelligent vehicles through remote control stations or vehicle-mounted navigation systems. Then, the obstacle repulsion potential field is established according to obstacle data. Raja et al. [
25] introduced a gradient function in the traditional APF method, which was composed of gravity, repulsion, tangential force, and gradient force according to a certain weight to form a modified potential field function. The gradient force is the function of vehicle yaw and pitch angle at a specific position, which ensures that the vehicle does not drive in the direction of high gradient force, thus obtaining the expected obstacle avoidance trajectory. Zhang et al. [
26] employed the elliptic distance to replace the actual distance in the traditional repulsion potential field, and comprehensively considered the influence of lane lines, obstacles, and the road boundary potential energy field on vehicles to obtain a smoother local obstacle avoidance trajectory. Kenealy et al. [
27] proposed an enhanced space-based potential field model to realize through the exploration of complex environments for autonomous robots.
Trajectory tracking has been the subject of numerous empirical studies that have investigated different control algorithms to establish an autonomous control model. The commonly used tracking control algorithms mainly include the proportion integration differentiation (PID) control algorithm, optimal preview control (OPC) algorithm, fuzzy control algorithm, sliding mode control (SMC) algorithm, linear quadratic regulator (LQR) control algorithm, and model predictive control (MPC) algorithm. The traditional PID control mainly relies on adjusting the gains of the three parts of the proportional unit, integral unit, and differential unit to set its characteristics [
28]. This algorithm is simple and easy to operate, but has poor adaptability in trajectory tracking under complex conditions. The OPC algorithm sets a preview point on the forward road of the vehicle, and realizes the tracking control of the expected trajectory by reducing the lateral deviation between the preview point and the expected road center line [
29]. Liu et al. [
30] improved the preview distance based on longitudinal speed and steering angle feedback, and designed a trajectory tracking controller according to the preview error model to make the change of steering angle more stable. Park et al. [
31] applied the proportion integration control in the lateral offset to reduce tracking error and alleviate the impact of preview distance with velocity change. The fuzzy control algorithm is mainly divided into three parts: input fuzzy, fuzzy reasoning, and defuzzification [
32]. The trajectory tracking is realized by designing different membership functions. The increment of the front wheel angle was taken as the output of the controller for the controller designed by Trabia et al. [
33], which included a steering fuzzy module and an obstacle avoidance fuzzy module. This algorithm reduced the computation of the controller. The SMC algorithm, also known as variable structure control, can dynamically change based on the current state of the system to achieve the goal of gradually stabilizing to the equilibrium point according to the predetermined state trajectory [
34]. The MPC algorithm has advantages in dealing with linear and nonlinear systems with constraints [
35]. Kong et al. [
36] designed MPC controllers based on vehicle kinematics and dynamics, and implemented tests to compare the prediction errors of the two controllers. The results demonstrated that the MPC controller based on kinematics had better performance and less computation under the low speed condition. Zanon et al. [
37] combined the nonlinear MPC with the moving vision estimation method to solve the problem of poor trajectory tracking accuracy on the road with a low friction coefficient.
How to improve the real-time performance and human-like degree is the difficulty and kernel of trajectory planning research. The trajectory planning model based on machine learning and deep learning algorithm can take into account the above two key points, but the inexplicability of the model still cannot be effectively solved. The heuristic search method represented by the A* algorithm has the characteristics of fast calculation speed. However, there are some differences between the planned trajectory and the actual driving trajectory derived from human drivers, since this type of algorithm relies more on the data processing method of computer and lacks a mechanism model similar to driver behavior. The traditional APF model could simulate the obstacle avoidance behavior of drivers, but how to prompt the human-like degree and some defects of the algorithm still need further study. In the actual driving process, the driver will control the vehicle in advance through preview behavior, and MPC algorithm can simulate the preview behavior of the driver by adjusting the prediction time domain. Existing research combines the APF trajectory planning model with the MPC algorithm to achieve obstacle avoidance. Due to the complexity of the vehicle dynamic model and considering the real-time requirements, the prediction time domain in the MPC algorithm cannot set too large. In addition, the vehicle kinematic model is frequently ignored in the control models. On the one hand, the human-like degree of the obstacle avoidance control would be weakened, and on the other hand, the comfort and smoothness of the planned trajectory would be influenced.
To address the deficiencies in the obstacle avoidance trajectory planning model based on the APF algorithm and the trajectory tracking model based on the MPC algorithm, a modified APF algorithm was proposed in the present research by establishing a road boundary repulsion potential field and an obstacle repulsion potential field with variable parameter. To make the planned obstacle avoidance trajectory meet the vehicle kinematics constraints and ameliorate the human-like degree, the APF algorithm was combined with the MPC algorithm to construct the obstacle avoidance trajectory replanning controller. Considering that there are many kinds of constraints during vehicle lateral control and for the sake of guaranteeing the real-time capability, accuracy, and robustness of the trajectory tracking control algorithm at different speeds, a linear time-varying model predictive trajectory tracking controller was established based on linearizing the vehicle monorail dynamic model. The controller on the basis of MPC determined the vehicle front wheel angle as the control variable, and multiple constraints for the vehicle dynamics and kinematics were combined to design the objective function that can achieve the requirements of fast and accurate tracking of the desired trajectory. In addition, this work implemented driver obstacle avoidance experiments under different speeds based on a driving simulator with six degrees of freedom to ensure that the established trajectory planning model was consistent with a human driver’s obstacle avoidance characteristics; that is, the planning trajectory was similar to the driver operation trajectory. Two pivotal parameters in the APF algorithm were determined to enhance the human-like degree of planned trajectory and the trajectory characteristics derived from human drivers were extracted to provide a basis for the parameters design of the proposed trajectory planning model for AVs. Finally, the co-simulation model based on CarSim/Simulink was established for the off-line simulation testing of the obstacle avoidance trajectory planning controller and the trajectory tracking controller designed in this study.
The remainder of the paper is organized as follows.
Section 2 details the obstacle avoidance trajectory planning model based on the APF algorithm and the MPC algorithm.
Section 3 provides detailed information on the trajectory tracking model based on the linear time-varying MPC algorithm.
Section 4 presents the experimental design, process, equipment, and feature analysis of the human driver’s obstacle avoidance trajectory. The co-simulation results of the proposed trajectory planning controller and trajectory tracking controller are introduced in
Section 5. Finally, conclusions are presented in
Section 6. The main framework of this study is presented in
Figure 1.
3. Obstacle Avoidance Trajectory Tracking Model
The MPC algorithm can use the dynamic prediction model to obtain the future vehicle state in a limited time domain based on the current vehicle motion state. This method has a strong ability to deal with multi-objective constraints [
40]. In this work, a linear time-varying MPC controller was established to track the trajectory from the obstacle avoidance trajectory planning model.
3.1. Vehicle Dynamic Model
Considering that the longitudinal speed remains unchanged and only the front wheel angle is controlled during obstacle avoidance, the following assumptions are made in the modeling process.
(1) The lateral forces and slip angles on the left and right tires of the vehicle are symmetric and equal in the vehicle coordinate system.
(2) The test sections are all flat roads, ignoring the influence of slope and other factors on the vertical movement of vehicles.
(3) The front wheel angle is small, and the lateral force of the tire is approximately linear with the slip angle of the tire.
(4) The influence of the suspension system, transmission system, air resistance, and the longitudinal and lateral coupling force of the tire is ignored.
The monorail dynamics model is established as shown in
Figure 6, and the dynamic equation of the model can be described as follows:
where
and
represent the longitudinal and lateral speed in the geodetic coordinate system,
,
, and
represent the longitudinal speed, lateral speed, and heading angle in the vehicle coordinate system,
represent vehicle mass,
and
represent the distance from the center of mass to the front and rear axles,
,
,
, and
represents the longitudinal and lateral forces of the front and rear axles, and
represent the moment of inertia.
The state variables was determined as
, and the control variable was selected as
. To satisfy the real-time requirements of the trajectory tracking controller when the vehicle is traveling at high speeds, the nonlinear dynamic model is linearized to obtain the linear time-varying equation:
where
, and
.
Using the first-order difference quotient to discretize Equation (22), the discrete state space expression can be obtained:
where
,
,
, and
is unit matrix.
3.2. Objective Function
To ensure that the trajectory tracking controller can promptly and smoothly track the expected trajectory, the following form of objective function is adopted:
where
and
are the prediction step size and control step size of the controller respectively;
and
are the weight coefficients,
is the relaxation factor,
is the relaxation coefficient, and
is the expected trajectory from the trajectory planning controller.
In Equation (24), the first item on the right side of the equal sign reflects the degree of tracking accuracy of the system; the second item is the constraint on the change of control quantity and increment of control quantity, reflecting the vehicle’s ability to maintain stability; the third item is the relaxation factor, which prevents the objective function from having no solution in the real-time calculation process.
In the objective function, it is necessary to calculate the output of the vehicle in the predictive time domain based on the linear error model, and Equation (23) was converted into:
where
,
,
,
is the dimension of state quantity, and
is the dimension of control quantity.
To simplify the calculation, assume
, and the predicted output expression of the system can be deduced as follows:
where
,
,
, and
By substituting Equation (26) into Equation (24), the complete objective function can be obtained.
3.3. Constraint Condition
One of the advantages of the MPC controller is its ability to handle multiple target constraints. On the one hand, the design of the constraints in the optimization solution should match the mechanical design constraints of the vehicle steering mechanism. On the other hand, it should also satisfy the needs of vehicle smooth control. The vehicle dynamic constraints need to be considered in the actual trajectory tracking control process, and the specific constraints include the centroid slip angle constraint, tire slip angle constraint, and road adhesion condition.
During the obstacle avoidance process, the front wheel angle and the increment of front wheel angle should satisfy the following constraints:
The centroid slip angle directly affects the vehicle’s driving stability and is an important reference index in vehicle stability control. The empirical formula of the centroid slip angle constraint is expressed as follows:
where
is the coefficient of road adhesion.
According to the relationship between the centroid slip angle and the front wheel angle, the tire slip angle can be expressed as:
There is a linear relationship between the slip angle and the corresponding lateral force of tire when the tire slip angle is relatively small. Hence, the front tire slip angle constraint can be expressed as:
The road adhesion condition determines the range of vehicle lateral force that can be provided, and it also affects vehicle control stability. The following constraints should be met between the vehicle lateral acceleration and the road adhesion condition:
Therefore, the specific optimization problem can be equivalent to the multi-constraint quadratic programming problem, which can be expressed as:
By solving Equation (32), the increment sequence of the control quantity can be expressed as:
On this basis, the first increment of control quantity in Equation (33) is taken as the actual output and is superimposed with the actual output control quantity in the previous period to obtain the actual control output quantity in the current period:
The actual output control quantity was implemented on the system, and the objective function was resolved based on the feedback state quantity in the next control cycle. Therefore, the incremental sequence of the control quantity was constantly updated to achieve the purpose of rolling optimization. Finally, the above optimization solution process was repeated to complete the vehicle trajectory tracking control.
6. Conclusions
In this work, an obstacle avoidance trajectory planning controller based on a modified APF algorithm and the MPC algorithm and a trajectory tracking controller based on the linear time-varying MPC algorithm were designed for the AV to realize the active obstacle avoidance function. The modified APF model proposed in this paper added a road boundary repulsive potential field and ameliorated the obstacle repulsive potential field based on the traditional APF model, overcoming some defects of the traditional model. To make the modified APF model satisfy the kinematic constraints of the vehicle, the MPC algorithm was combined with the modified APF model, and a reasonable objective function was constructed to minimize the deviation between the planning trajectory of the modified APF model and the predicted trajectory of the MPC algorithm. Considering that there were many kinds of constraints during vehicle lateral control and for the sake of guaranteeing real-time capability, accuracy, and robustness of the trajectory tracking control algorithm at different speeds, a linear time-varying model predictive trajectory tracking controller was established on the basis of linearizing the vehicle monorail dynamic model. The controller determined the vehicle front wheel angle as the control variable, and multiple constraints of vehicle dynamics and kinematics were combined to design the objective function that could achieve the requirements of fast and accurate tracking of the desired trajectory.
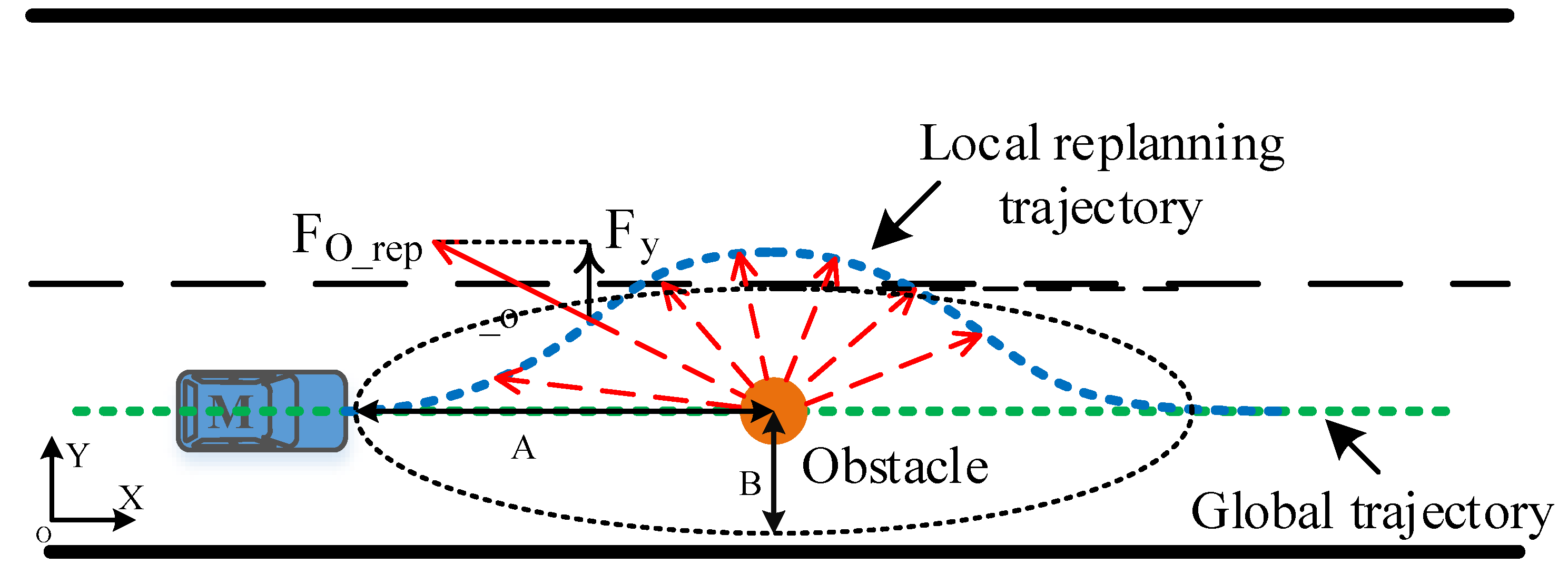
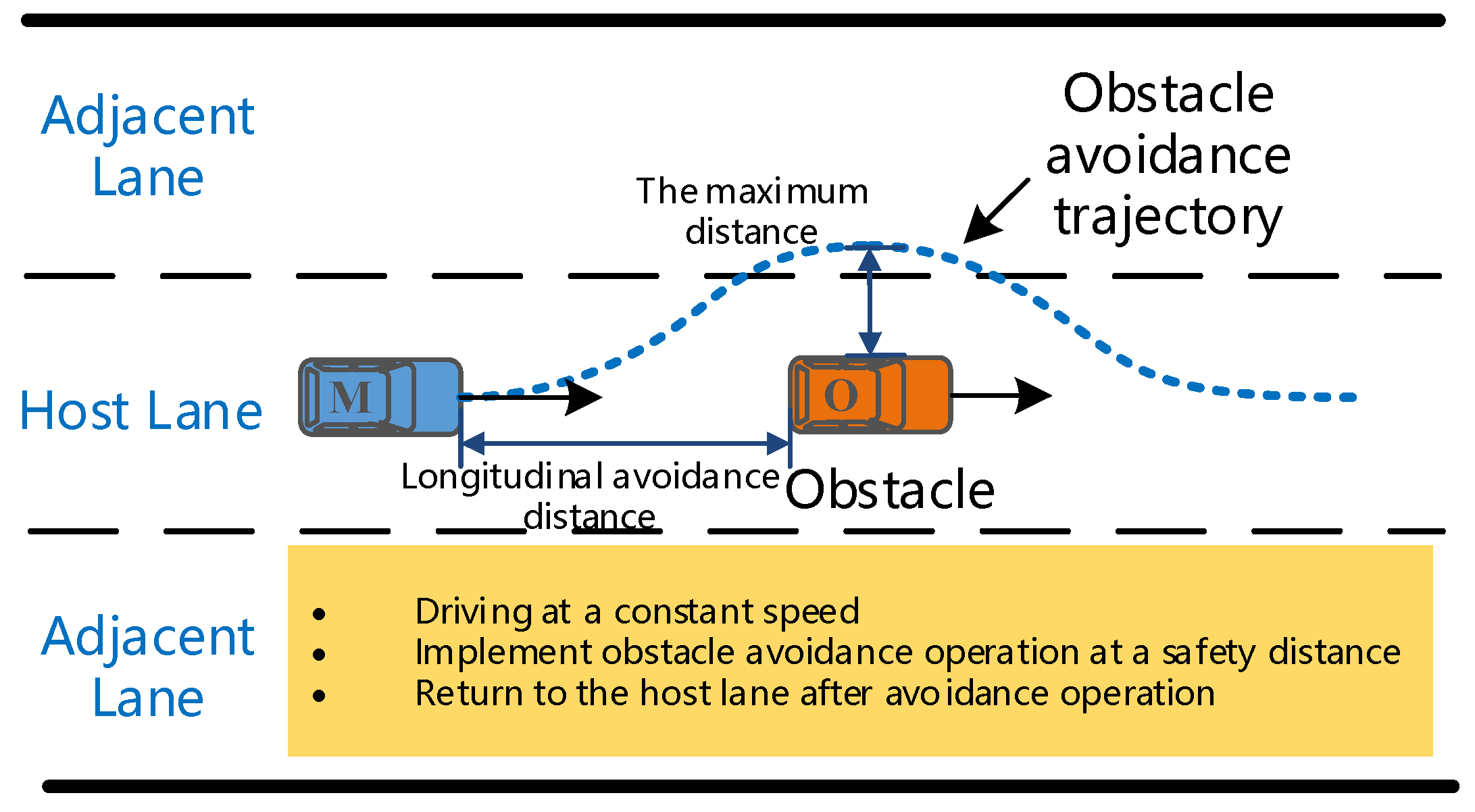
Ameliorating the human-like degree of the planning trajectory is the core of improving the acceptance of the autonomous driving system. Therefore, in this study, a human driver’s obstacle avoidance experiment was implemented based on a six-degree-of-freedom driving simulator equipped with multiple sensors, including a steering wheel angle sensor, accelerator pedal sensor, brake pedal sensor, virtual millimeter wave radar sensor, and virtual LIDAR sensor. The obstacle avoidance trajectories under different speeds from different drivers were collected, and the longitudinal distance at the beginning of the obstacle avoidance operation and the maximum distance during the obstacle avoidance process underwent statistical analysis. These two parameters can provide a basis for the determination of the A value and B value in the elliptical repulsive potential field (shown in
Figure 4), making the planned trajectory more human-like.
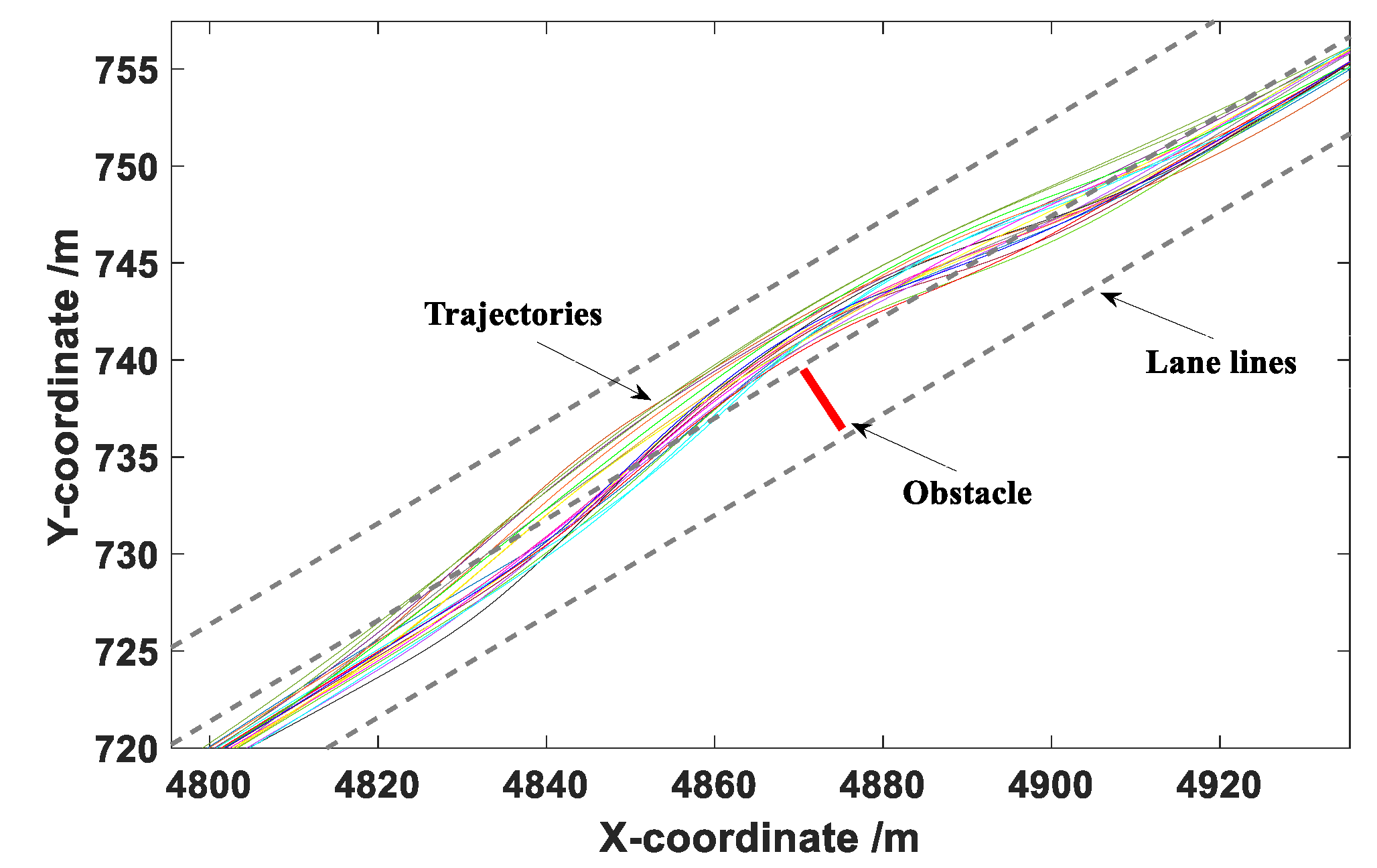
Finally, a co-simulation model based on CarSim/Simulink was established for the off-line simulation testing of the obstacle avoidance trajectory planning controller and the trajectory tracking controller designed in this study. The co-simulation results demonstrated that the vehicles could smoothly avoid obstacles under different speeds. The results of relevant parameters during the obstacle avoidance process were in accordance with the human drivers’ obstacle avoidance trajectory characteristics in
Section 4, which indicated that the proposed trajectory planning controller and the trajectory tracking controller were more human-like under the premise of ensuring the safety and comfort of the obstacle avoidance operation.
A few deficiencies in this study need to be improved in the future work. Different road environments may have an impact on driver’s obstacle avoidance behavior. A future study will pay close attention to collect the driver’s operation data under different road environments and analyze the difference. In addition, the parameters of the obstacle avoidance controller in complex scenarios need to be further optimized.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}