Illumination Adaptation in a Multi-Wavelength Opto-Electronic Patch Sensor

 , ,
, , 
Abstract
:1. Introduction
2. Implementation of Multi-Wavelength Opto-Electronic Patch Sensor
2.1. Overview of mOEPS Operation
2.2. Multiplexing Four Wavelength Illuminations and Demultiplexing Mixture of Received PD Signals
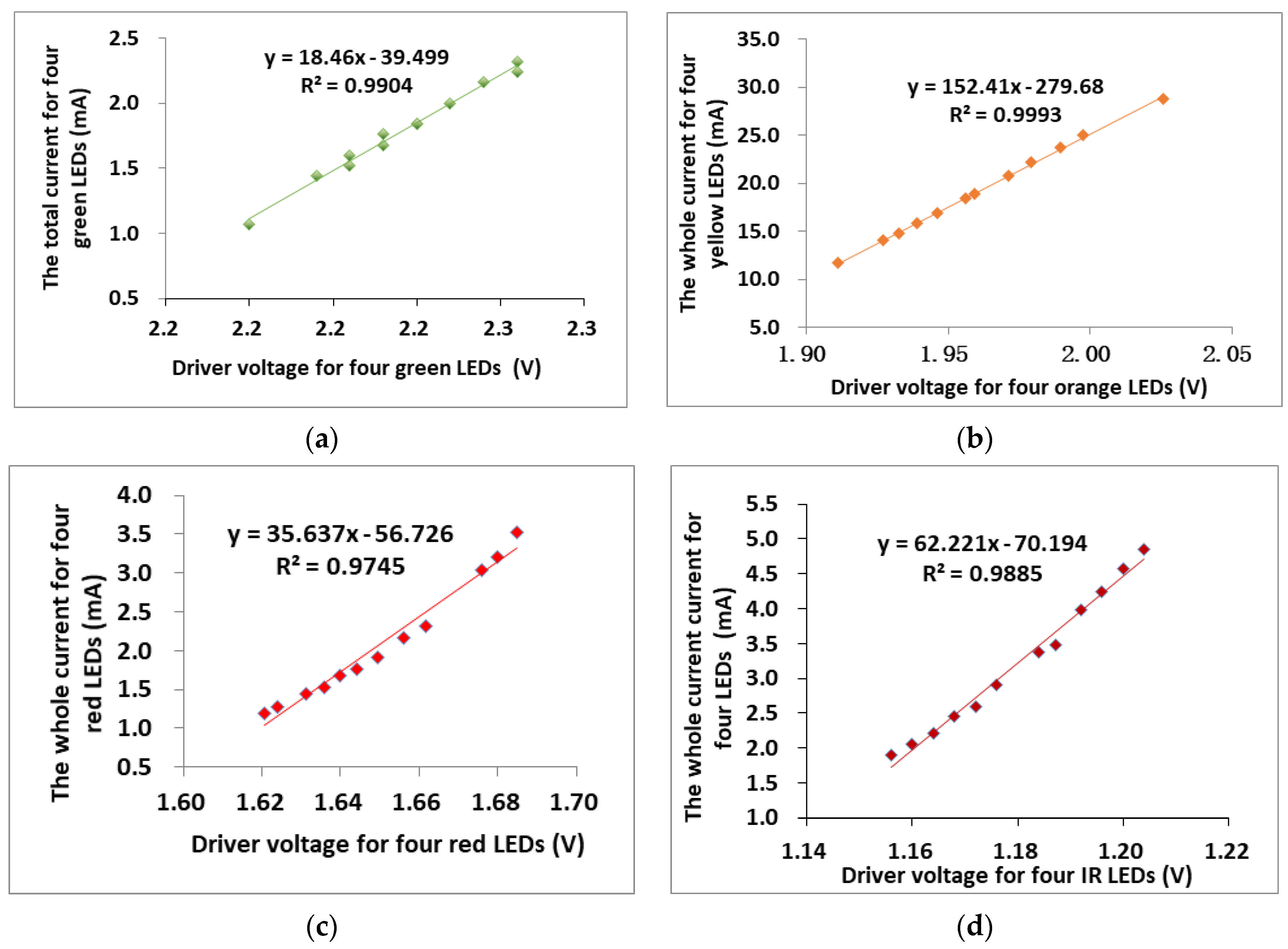
2.3. LED Driver
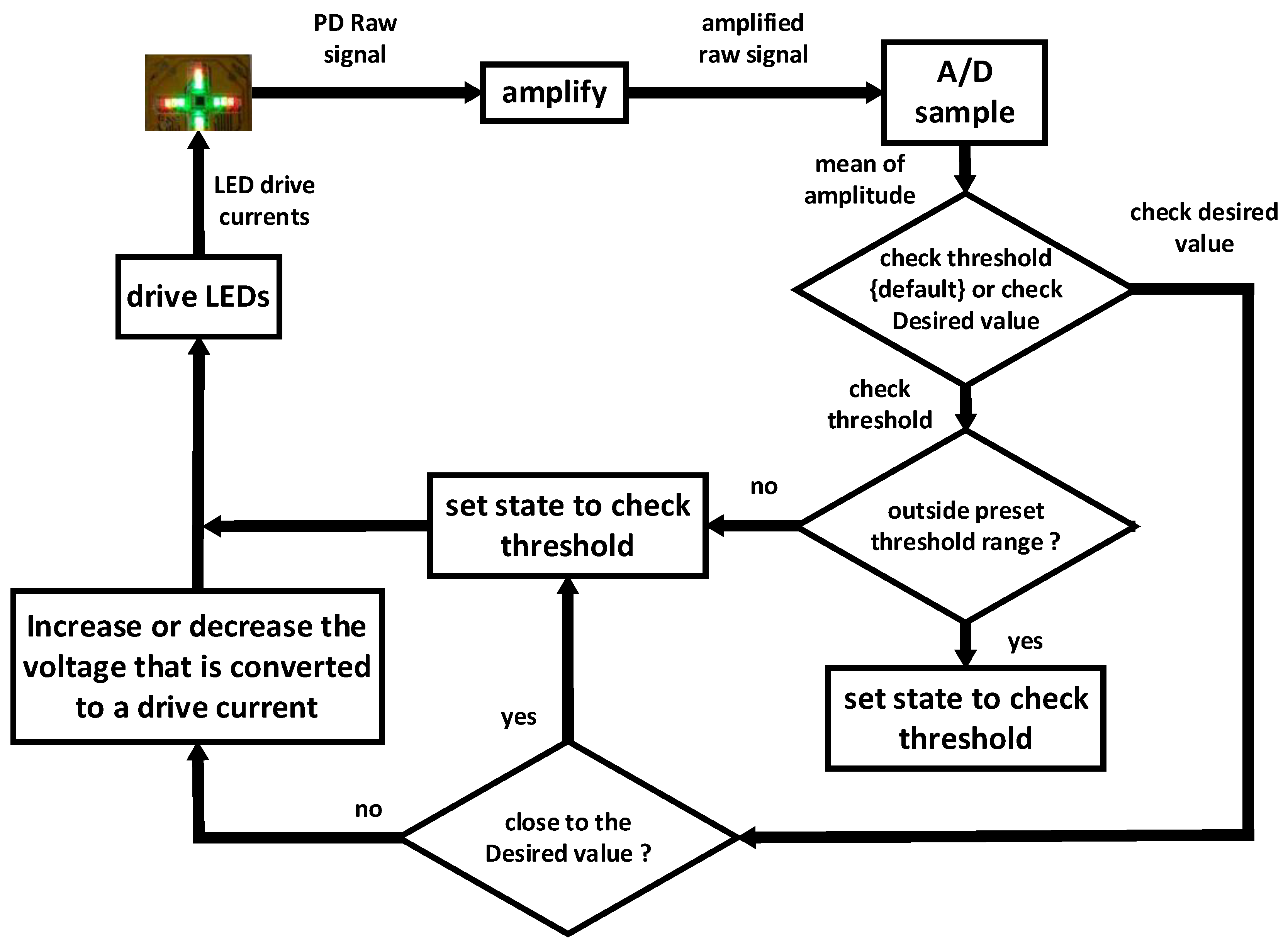
2.4. Automated Adjustment of the LED Intensity
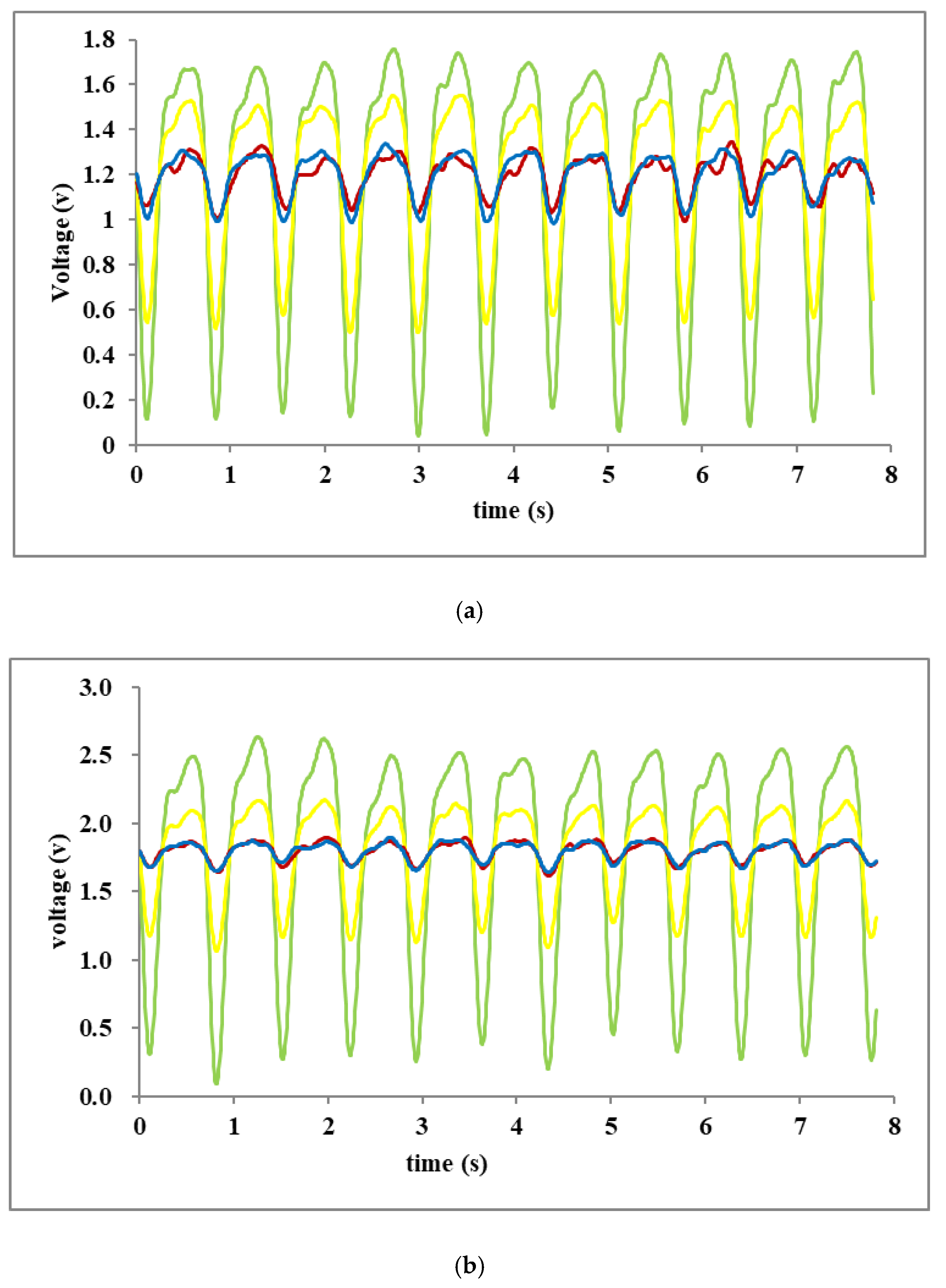
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Allen, J. Photoplethysmography and its application in clinical physiological measurement. Physiol. Meas. 2007, 28, R1–R39. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abay, T.Y.; Kyriacou, P.A. Reflectance photoplethysmography as noninvasive monitoring of tissue blood perfusion. IEEE Trans. Biomed. Eng. 2015, 62, 2187–2195. [Google Scholar] [CrossRef] [PubMed]
- Stojanović, R.; Karadaglic, D. Design of an oximeter based on LED-LED configuration and FPGA technology. Sensors 2013, 13, 574–586. [Google Scholar] [CrossRef] [PubMed]
- Ruiz, L.M.; Manzo, A.; Casimiro, E.; Cárdenas, E.; González, R. Heart Rate Variability Using Photoplethysmography with Green Wavelength. In Proceedings of the 2014 IEEE Int’l Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 5–7 November 2014; pp. 1–5. [Google Scholar]
- Asada, H.H.; Shaltis, P.; Reisner, A.; Rhee, S.; Hutchinson, R.C. Mobile monitoring with wearable photoplethysmographic biosensors. IEEE Eng. Med. Biol. Mag. 2003, 22, 28–40. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Patterson, J.A.; McIlwraith, D.C.; Yang, G.Z. A flexible, Low Noise Reflective PPG Sensor Platform for ear-Worn Heart Rate Monitoring. In Proceedings of the 2009 6th Int’l. Workshop Wearable and Implantable Body Sensor, Berkeley, CA, USA, 3–5 June 2009; pp. 286–291. [Google Scholar]
- Wu, W.; Stapelfeldt, F.N.; Weimann, T.; Hinze, P.; Dziomba, T.; Bodermann, B.; Kroker, S.; Wasisto, H.S.; Waag, A. Method for Non-Invasive Hemoglobin Oxygen Saturation Measurement Using Broadband Light Source and Color Filters. In Proceedings of the European Conference on Biomedical Optics 2019, Munich, Germany, 23–25 June 2019. [Google Scholar] [CrossRef]
- Hong, S.; Park, K.S. Unobtrusive photoplethysmographic monitoring under the foot sole while in a standing posture. Sensors 2018, 18, 3239. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hernando, A.; Peláez, M.D.; Lozano, M.T.; Aiger, M.; Gil, E.; Lázaro, J. Finger and Forehead PPG Signal Comparison for Respiratory Rate Estimation Based on Pulse Amplitude Variability. In Proceedings of the 2017 25th European Signal Processing Conference (EUSIPCO), Kos Island, Greece, 28 August–2 September 2017; pp. 2076–2080. [Google Scholar]
- Phan, D.; Siong, L.Y.; Pathirana, P.N.; Seneviratne, A. Smartwatch: Performance Evaluation for Long-Term Heart Rate Monitoring. In Proceedings of the 2015 Int’l symp bioelectronics bioinformatics (ISBB), Beijing, China, 5–7 January 2015; pp. 144–147. [Google Scholar]
- Hung, K.; Lee, C.; Chan, W.; Choy, S.-O.; Kwok, P. Development of novel wearable sensors for mobile health. In Proceedings of the 2012 IEEE-EMBS Int’l. Conf. Biomed. Health Informatics, Hong Kong, China, 5–7 January 2012; pp. 745–747. [Google Scholar]
- Nishikawa, M.; Ishizuka, Y.; Matsuo, H.; Shigematsu, K. An LED Drive Circuit with Constant-Output-Current Control and Constant-Luminance Control. In Proceedings of the INTELEC 06 -Twenty-Eighth International Telecommunications Energy Conference, Providence, RI, USA, 10–14 September 2006; pp. 1–6. [Google Scholar]
- Mu, H.; Geng, L.; Liu, J. A High. Precision Constant Current Source Applied in LED Driver. In Proceedings of the 2011 Symp. Photonics Optoelectronics (SOPO), Wuhan, China, 16–18 May 2011; pp. 1–4. [Google Scholar]
- Hsieh, Y.T.; Liu, B.D.; Wu, J.F.; Fang, C.L.; Tsai, H.H.; Juang, Y.Z. A high current accuracy boost white led driver based on offset calibration technique. IEEE Trans. Circuits Syst. II Express Briefs 2011, 58, 244–248. [Google Scholar] [CrossRef]
- Chen, C.; Gao, H.; Leng, Y.; Xi, J.; He, L.; Sun, K. A Constant Current LED Driver Based on Flyback Structure with Novel Primary Side Control. In Proceedings of the 2015 International SoC Design Conference (ISOCC), Gyungju, Korea, 2–5 November 2015; pp. 119–120. [Google Scholar]
- Wang, Y.; Gao, M.; Guo, D. Design of 16-Bits Constant-Current LED Driver. In Proceedings of the 2010 Int’l. Conf. Anti-Counterfeiting, Security and Identification, Chengdu, China, 18–20 July 2010; pp. 53–56. [Google Scholar]
- Hu, Y.; Jovanovic, M.M. A Novel LED Driver with Adaptive Drive Voltage. In Proceedings of the 2008 Twenty-Third Annual IEEE Applied Power Electronics Conference and Exposition, Austin, TX, USA, 24–28 February 2008; pp. 565–571. [Google Scholar]
- Zhang, J.; Xu, L.; Wu, X.; Qian, Z. A Precise passive current balancing method for multioutput LED drivers. IEEE Trans. Power Electron. 2011, 26, 2149–2159. [Google Scholar] [CrossRef]
- Wu, X.; Zhang, J.; Qian, Z. A simple two-channel LED driver with automatic precise current sharing. IEEE Trans. Ind. Electron. 2011, 58, 4783–4788. [Google Scholar] [CrossRef]
- Saadeh, W.; Aslam, S.Z.; Hina, A.; Asghar, F. In A 0.5 V PPG-Based Heart Rate and Variability Detection System. In Proceedings of the 2018 IEEE Biomedical Circuits and Systems Conference (BioCAS), Cleveland, OH, USA, 17–19 October 2018; pp. 1–4. [Google Scholar]
- Atef, M.; Wang, M.; Wang, G. A Fully integrated high-sensitivity wide dynamic range ppg sensor with an integrated photodiode and an automatic dimming control LED driver. IEEE Sensors J. 2017, 18, 652–659. [Google Scholar] [CrossRef]
- Luo, Q.; Zhao, B.; Zou, C.; Zhi, S.; Zhou, L. Analysis and design of a multi-channel constant current light-emitting diode driver based on high-frequency AC bus. IET Power Electron. 2013, 6, 1803–1811. [Google Scholar] [CrossRef]
- Zhao, C.; Xie, X.; Liu, S.R. Multioutput LED drivers with precise passive current balancing. IEEE Trans. Power Electron. 2012, 28, 1438–1448. [Google Scholar] [CrossRef]
- Sun, T.P.; Wang, C.H. Specially designed driver circuits to stabilize LED light output without a photodetector. IEEE Trans. Power Electron. 2011, 27, 4140–4152. [Google Scholar] [CrossRef]
- Hu, Y.; Jovanović, M.M. LED driver with self-adaptive drive voltage. IEEE Trans. Power Electron. 2008, 23, 3116–3125. [Google Scholar] [CrossRef]
- Hu, S.; Azorin-peris, V. Opto-Physiological Sensor and Method of Assembly. U.S. Patent 10327652B2, 25 June 2019. [Google Scholar]
- Alzahrani, A.; Hu, S.; Azorin-Peris, V. A comparative study of physiological monitoring with a wearable opto-electronic patch sensor (OEPS) for motion reduction. Biosensors 2015, 5, 288–307. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hayes, M.J.; Smith, P.R. Artifact reduction in photoplethysmography. Appl. Opt. 1998, 37, 7437–7446. [Google Scholar] [CrossRef] [PubMed]
- Kurylyak, Y.; Lamonaca, F.; Grimaldi, D.; Duro, F. Smartphone based photoplethysmogram measurement. In Digital Image, Signal and Data Processing for Measurement Systems; River Publishers: Gistrup, Denmark, 2012; pp. 135–164. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.02 | 12.05 | 12.03 | 0.67 | 0.60 | 0.60 | 0.60 | 0.60 |
| 0.04 | 12.05 | 12.01 | 1.33 | 1.30 | 1.30 | 1.30 | 1.30 |
| 0.06 | 12.05 | 11.99 | 2.00 | 2.00 | 2.00 | 2.00 | 2.00 |
| 0.08 | 12.05 | 11.97 | 2.67 | 2.60 | 2.60 | 2.60 | 2.60 |
| 0.10 | 12.05 | 11.95 | 3.33 | 3.30 | 3.30 | 3.30 | 3.30 |
| 0.12 | 12.05 | 11.93 | 4.00 | 4.00 | 4.00 | 4.00 | 4.00 |
| 0.14 | 12.05 | 11.91 | 4.67 | 4.60 | 4.60 | 4.60 | 4.60 |
| 0.16 | 12.05 | 11.89 | 5.33 | 5.30 | 5.30 | 5.30 | 5.30 |
| 0.18 | 12.05 | 11.87 | 6.00 | 6.00 | 6.00 | 6.00 | 6.00 |
| 0.20 | 12.05 | 11.85 | 6.67 | 6.60 | 6.60 | 6.60 | 6.60 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, L.; Yu, Y.; Hu, S.; Mulvaney, D.; Blanos, P.; Alharbi, S.; Hayes, M. Illumination Adaptation in a Multi-Wavelength Opto-Electronic Patch Sensor. Sensors 2020, 20, 4734. https://doi.org/10.3390/s20174734
Yan L, Yu Y, Hu S, Mulvaney D, Blanos P, Alharbi S, Hayes M. Illumination Adaptation in a Multi-Wavelength Opto-Electronic Patch Sensor. Sensors. 2020; 20(17):4734. https://doi.org/10.3390/s20174734
Chicago/Turabian StyleYan, Liangwen, Yue Yu, Sijung Hu, David Mulvaney, Panagiotis Blanos, Samah Alharbi, and Matthew Hayes. 2020. "Illumination Adaptation in a Multi-Wavelength Opto-Electronic Patch Sensor" Sensors 20, no. 17: 4734. https://doi.org/10.3390/s20174734