Collision-Free Transmissions in an IoT Monitoring Application Based on LoRaWAN


Abstract
:1. Introduction
2. Related Work
2.1. IoT Monitoring Applications
2.2. LoRaWAN and Its Reliability Problem
- Class A devices, with the basic set of features that all devices must implement. Hence, class A is the default class with the lowest power consumption class [7].
- Class B devices, in addition to the functionalities of Class A, can be accessed by the GW at some predefined time slots defined by Beacon messages periodically sent by the gateway [11].
- Class C devices are Continuously listening End Devices. Hence, they are accessible with low-latency but consume more energy than EDs of any other class [10].
2.3. Solutions Based on Time Slots
3. Framework for Performance Evaluation
3.1. Notations
3.2. General Architecture
- A1
- A single gateway (GW) exists in the monitoring area. It is located in the center of the monitoring area to reduce its distance to EDs, whose activity is ruled by their duty cycle limitation (i.e., 1%).
- A2
- This gateway has a number of frequency channels , 6 or 8. Three is the default number, whereas eight is the maximum number of frequency channels that a commercially available GW can listen to, see for instance the technical features of the SX1301 digital baseband chip [6].
- A3
- The gateway can simultaneously demodulate several messages using different spreading factors even on the same frequency channel. However, the gateway cannot demodulate more than messages simultaneously [6]. M is also called the number of receive paths in the literature.
- A4
- The monitoring area is split into angular sectors centered at the gateway as depicted in Figure 1. Each angular sector is called a cluster. Clusters are populated by End Devices (EDs), according to their geographical coordinates obtained when the EDs are deployed.
- A5
- All EDs are LoRaWAN [13] class A devices, which is the basic class and the most energy-efficient one.
- A6
- All EDs are one-hop away from the GW. In other words, the network topology is a star centered at the GW.
- A7
- Each ED uses a spreading factor that depends on its distance to the GW.
- A8
- Each ED transmits a single message per monitoring period, denoted . This message contains its monitoring report. This uplink traffic is not acknowledged (i.e., unconfirmed data type).
- A9
- Each ED transmits its monitoring message at a time and on a frequency channel assigned by the Network Server according to the solution considered (e.g., Algorithm 1 for FAPM in Section 5).
- A10
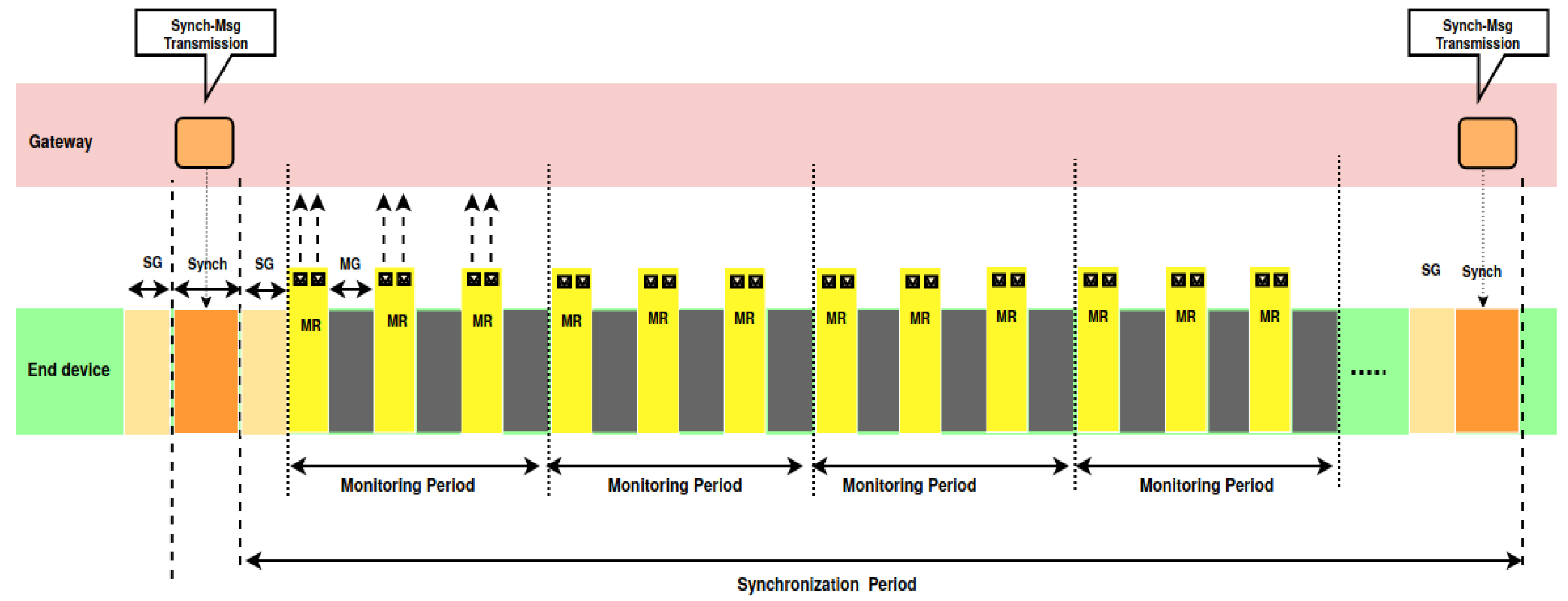
- All EDs are synchronized with regard to the reference time of the GW. All EDs are kept synchronized within from the GW. The synchronization period is denoted .
- the synchronization guard to avoid either the overlapping of either a previous uplink transmission and the downlink synchronization message, or the overlapping of a previous downlink synchronization message and an uplink transmission.
- the monitoring guard to avoid overlapping of two successive uplink transmissions made by two different EDs.
- Constraint C1:
- The synchronization period contains monitoring periods with :where is the Transmission on Air of the synchronization message.
- Constraint C2:
- The monitoring period allows each ED to transmit its monitoring report without collisions. The expression of this constraint depends on the solution adopted (e.g., OAPM_D, FAPM, etc.).
3.3. Performance Evaluation Criteria and Additional Assumptions
- A11
- All clusters have the same distribution of SFs.
- A12
- The synchronization message is broadcast with the maximum SF used in the configuration considered. It has a total size of 17 bytes, where 4 bytes are used for the GW timestamp.
- A13
- The synchronization period is set to 1602 s, corresponding to a maximum propagation delay of 18 s [32] associated with a radius of 6 km around the GW, ms, ms and ms. The monitoring period varies from 400 s to 1600 s.
- A14
- The monitoring report transmitted by each End Device (ED) has a message size of 21 bytes. In the monitoring message, each index of the six main air pollutants is coded on 10 bits, leading to 8 bytes of payload and a total of 21 bytes for the Monitoring message.
- A uniform configuration where the distribution of EDs within the monitoring area is uniform with regard to the different spreading factors. Each SF in {7,8,9,10,11,12} is used by 100/6 = 16.66% of the EDs in the monitoring area. Intuitively, this configuration has the same number of EDs in each concentric crown of width R around the GW, where R is the radio range of the smallest spreading factor. This means that the number of EDs with high spreading factors per unit of surface is reduced compared to the number of EDs with small spreading factors. It corresponds to a constant distribution of SFs.
- A non-uniform distribution where the minimum and the maximum SFs (i.e., SF7 and SF12) are used by 10% of the EDs, whereas the other SFs are used by 20% of the EDs. This configuration is close to the uniform one, except that the number of EDs very close and the number of EDs very far are smaller. This corresponds to a one-step distribution of SFs.
- A non-uniform distribution where the only SFs present in the monitoring area are SF7, SF8 and SF9, in the same ratio. This configuration corresponds to a “best case” deployment, where all EDs are close to the GW.
- A non-uniform distribution where the only SFs present in the monitoring area are SF10, SF11 and SF12, in the same ratio. This configuration corresponds to a “worst case” deployment, where all EDs are far from the GW, which could not be installed closer to the EDs for diverse reasons.
- a non-uniform distribution where all SFs are present but with different percentages. is used by 5% of EDs, by 15%, by 35%, by 30%, by 10% and by 5%. This configuration corresponds to a deployment, where some EDs are very close to the GW whereas others are very far, but most of them are at a medium distance from the GW. The SF distribution shape is closer to a bell.
4. OAPM_D, A TDMA-Based Solution
4.1. Presentation of OAPM_D
4.2. Presentation of OAPM_O
4.3. Theoretical Performances of OAPM_D and OAPM_O
4.3.1. Configuration
4.3.2. Configuration
4.3.3. Configuration
4.3.4. Configuration
4.3.5. Configuration
4.4. Discussion
5. FAPM, A FDMA-Based Solution
5.1. Description of FAPM
- -
- the number of receive paths assigned to the containing cluster, for all the four solutions. This number is reduced to one for FAPM.
- -
- the number of different SFs present in this sub-cluster, for OAPM_D and FAPM_O.
- -
- the number of different SFs present in this sub-cluster times the number of frequencies assigned to this sub-cluster, for OAPM_O.
5.2. System Behavior with FAPM
| Algorithm 1 End Devices Configuration (Run by the server to configure all End Devices) |
|
| Algorithm 2 Monitoring step (Run by any End Device ) |
|
5.3. Presentation of FAPM_O
5.4. Theoretical Performances of FAPM and FAPM_O
5.4.1. Configuration
| ED1 | SF12 | SF10 | SF8 |
| ED2 | SF11 | SF9 | SF7 |
| Time |
5.4.2. Configuration
| ED1 | SF7 | SF8 | SF9 | SF10 | SF11 |
| ED2 | SF8 | SF9 | SF10 | SF11 | SF12 |
| Time |
5.4.3. Configuration
| ED1 | SF7 | SF8 | SF9 |
| ED2 | SF9 | SF7 | SF8 |
| Time |
5.4.4. Configuration
| ED1 | SF10 | SF11 | SF12 |
| ED2 | SF12 | SF10 | SF11 |
| Time |
5.4.5. Configuration
| ED1 | SF7 | SF9 | SF11 | SF8 | SF10 | SF8 | SF9 | SF9 | SF9 | SF9 |
| ED2 | SF8 | SF10 | SF12 | SF9 | SF11 | SF9 | SF10 | SF10 | SF10 | SF10 |
| Time |
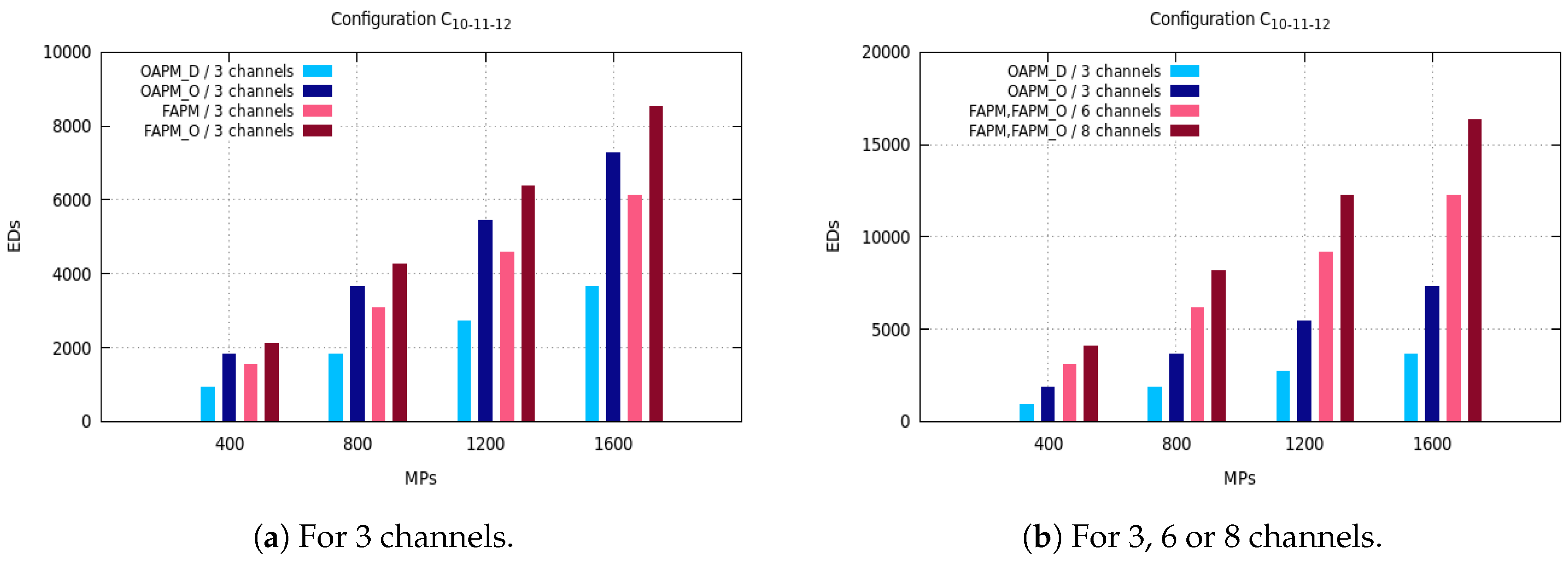
6. Comparative Performance Evaluation
6.1. Comparison of Theoretical Results
6.2. Simulation Parameters
6.3. Packet Delivery Ratio
6.4. Energy Consumption
- the energy consumed in transmitting its monitoring report once per monitoring period. Since the monitoring report message is not acknowledged and there is no retransmission, the energy consumed for the transmission in one synchronization period is equal to the Transmission Power, , times , the transmission duration of a monitoring report using the Spreading Factor of this ED, times the number of monitoring periods in a synchronization period. This energy is the same for all the solutions proposed.
- the energy consumed in listening to the medium, which is equal to the Idle power times the synchronization guard . Again, this energy is the same for all the solutions proposed.
- the energy consumed in receiving the synchronization message, which is equal to the Receive Power, , times the transmission duration of the synchronization message, which is the same for the solutions proposed.
7. Applicability of These Solutions
- the number of EDs deployed.
- the geographical coordinates of each ED. The spreading factor used by the ED considered is deduced from its distance to the GW. The cluster to which this ED belongs is computed from its geographical coordinates.
- the average delay between two consecutive application messages generated by the same ED, also called inter-arrival time, and the standard deviation.
- the message size.
- the maximum acceptable data latency, which is defined as the maximum time elapsed between the generation of the message including these data and its receipt by the GW.
- the reliability required, which is expressed by the PDR.
- the minimum lifetime of ED, which is requested by the application.
- the maximum duty cycle of ED, which is accepted by the application.
- the existence of an urgent traffic. If it exists, it should be described as the normal traffic is and the reliability and latency constraints should be expressed.
- the ED cost. In this paper, we assume that the ED cost is proportional to the complexity of the solution implemented in this ED.
- The coexistence with other applications sharing this GW.
7.1. Complexity
7.2. Data Gathering Duration
7.3. Data Latency
7.4. Urgent Traffic Support
- The first one is left to Urg_EDs. They are the only devices allowed to transmit in this part. They transmit an urgent message, if it exists, and a normal message otherwise. As a consequence, an Urg_ED has as many opportunities to transmit urgent messages as the number of urgent monitoring periods in a monitoring period.
- The second part is left to some Norm_EDs. Norm_EDs are assigned to urgent monitoring periods in such a way that each Norm_ED has a single opportunity to transmit in each monitoring period.
- This third part may be empty, it depends on the application requirements. In the third part, all devices are sleeping to save energy.
7.5. Probabilistic Traffic
8. A Hybrid Solution with FAPM_H
8.1. FAPM_H Solution of An Optimization Problem
- Minimize the transmission duration on any receive path assigned to any frequency channel:
- At any time t, any transmission not finished at the end of slot t is going on in slot on the same receive path and the same channel:
- At any time t, there are no more than F frequency channels used:
- At any time t, at most M messages are simultaneously decoded by the GW:
- At any time, at most 6 messages are simultaneously received by the GW on the same frequency.
- At any time, there are no two EDs that simultaneously transmit with the same SF and on the same frequency:
8.2. FAPM_H for the Uniform Configuration
| Freq 1 | Receive Path 1 | SF12 | SF9 | SF9 | SF8 | SF7 | SF7 |
| Receive Path 2 | SF11 | SF11 | SF8 | SF11 | |||
| Receive Path 3 | SF10 | SF10 | SF12 | ||||
| Freq 2 | Receive Path 4 | SF12 | SF9 | SF9 | SF8 | SF7 | SF7 |
| Receive Path 5 | SF11 | SF11 | SF8 | SF11 | |||
| Receive Path 6 | SF10 | SF10 | SF12 | ||||
| Freq 3 | Receive Path 7 | SF12 | SF9 | SF9 | SF8 | SF7 | SF7 |
| Receive Path 8 | SF10 | SF10 | SF12 | SF8 | |||
| Total Time | + |
8.3. FAPM_H for the Configuration
| Freq 1 | Receive Path 1 | SF12 | SF11 | SF9 | SF8 | SF8 | SF8 | SF7 | ||||
| Receive Path 2 | SF11 | SF10 | SF9 | SF9 | SF10 | SF10 | SF10 | |||||
| Freq 2 | Receive Path 3 | SF12 | SF11 | SF8 | SF8 | SF8 | ||||||
| Receive Path 4 | SF11 | SF9 | SF9 | SF9 | SF9 | SF9 | SF9 | SF9 | SF9 | SF9 | SF7 | |
| Receive Path 5 | SF10 | SF10 | SF10 | SF10 | SF10 | SF10 | SF10 | |||||
| Freq 3 | Receive Path 6 | SF12 | SF11 | SF8 | SF8 | SF8 | ||||||
| Receive Path 7 | SF11 | SF9 | SF9 | SF9 | SF9 | SF9 | SF9 | SF9 | SF9 | SF9 | SF7 | |
| Receive Path 8 | SF10 | SF10 | SF10 | SF10 | SF10 | SF10 | SF10 | |||||
| Time |
8.4. Conclusion on FAPM_H and the Other Solutions Studied
- When , FAPM, FAPM_O and FAPM_H which behave exactly the same, are optimal.
- When , only M frequencies can be used simultaneously. In such a case, FAPM, FAPM_O and FAPM_H which behave exactly the same, are optimal for this value of M.
- When , FAPM_H provides better results by combining inter-channel parallelism (i.e., several frequency channels) and intra-channel parallelism (i.e., several receive paths per channel) while trying to balance the total transmission duration on each receive path, which leads to a smaller data gathering duration.
9. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Citoni, B.; Fioranelli, F.; Imran, M.A.; Abbasi, Q.H. Internet of Things and LoRaWAN-Enabled Future Smart Farming. IEEE Internet Things Mag. 2019, 2, 14–19. [Google Scholar] [CrossRef]
- Singh, R.K.; Aernouts, M.; De Meyer, M.; Weyn, M.; Berkvens, R. Leveraging LoRaWAN Technology for Precision Agriculture in Greenhouses. Sensors 2020, 20, 1827. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Caubel, J.J.; Cados, T.E.; Preble, C.V.; Kirchstetter, T.W. A Distributed Network of 100 Black Carbon Sensors for 100 Days of Air Quality Monitoring in West Oakland, California. Environ. Sci. Technol. 2019, 53, 7564–7573. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Addabbo, T.; Fort, A.; Mugnaini, M.; Parri, L.; Parrino, S.; Pozzebon, A.; Vignoli, V. A low power IoT architecture for the monitoring of chemical emissions. ACTA IMEKO 2019, 8, 53–61. [Google Scholar] [CrossRef]
- Yu, F.; Zhu, Z.; Fan, Z. Study on the feasibility of LoRaWAN for smart city applications. In Proceedings of the 2017 IEEE 13th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Rome, Italy, 9–11 October 2017; pp. 334–340. [Google Scholar]
- Semtech, Wireless and Sensing Products Datasheet. Available online: https://www.semtech.com/products/wireless-rf/lora-gateways/sx1301#download-resources (accessed on 5 May 2020).
- Queralta, J.; Gia, T.; Zou, Z.; Tenhunen, H.; Westerlund, T. Comparative study of LPWAN technologies on unlicensed bands for M2M communication in the IoT: Beyond LoRa and LoRaWAN. Procedia Comput. Sci. 2019, 155, 343–350. [Google Scholar] [CrossRef]
- Zorbas, D.; Abdelfadeel, K.; Kotzanikolaou, P.; Pesch, D. TS-LoRa: Time-slotted LoRaWAN for the Industrial Internet of Things. Comput. Commun. 2020, 153, 1–10. [Google Scholar] [CrossRef]
- Haxhibeqiri, J.; Moerman, I.; Hoebeke, J. Low overhead scheduling of lora transmissions for improved scalability. IEEE Internet Things J. 2018, 6, 3097–3109. [Google Scholar] [CrossRef] [Green Version]
- Polonelli, T.; Brunelli, D.; Marzocchi, A.; Benini, L. Slotted aloha on lorawan-design, analysis, and deployment. Sensors 2019, 19, 838. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Adelantado, F.; Vilajosana, X.; Tuset-Peiro, P.; Martinez, B.; Melia-Segui, J.; Watteyne, T. Understanding the Limits of LoRaWAN. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef] [Green Version]
- Bor, M.C.; Roedig, U.; Voigt, T.; Alonso, J.M. Do LoRa Low-Power Wide-Area Networks Scale? In Proceedings of the 19th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems (MSWIM), Malta, Malta, 13–17 November 2016; pp. 59–67. [Google Scholar]
- LoRa Alliance. LoRaWAN 1.0.3 Specification. Available online: https://lora-alliance.org/resource-hub/lorawanr-specification-v103 (accessed on 25 January 2020).
- Davcev, D.; Mitreski, K.; Trajkovic, S.; Nikolovski, V.; Koteli, N. IoT agriculture system based on LoRaWAN. In Proceedings of the 2018 14th IEEE International Workshop on Factory Communication Systems (WFCS), Imperia, Italy, 13–15 June 2018; pp. 1–4. [Google Scholar]
- Basford, P.J.; Bulot, F.M.; Apetroaie-Cristea, M.; Cox, S.J.; Ossont, S.J. LoRaWAN for smart city IoT deployments: A long term evaluation. Sensors 2020, 20, 648. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Johnston, S.J.; Basford, P.J.; Bulot, F.M.; Apetroaie-Cristea, M.; Easton, N.H.; Davenport, C.; Foster, G.L.; Loxham, M.; Morris, A.K.; Cox, S.J. City scale particulate matter monitoring using LoRaWAN based air quality IoT devices. Sensors 2019, 19, 209. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- LoRa Alliance. What is LoRaWAN: A Technical Overview of LoRa and LoRaWAN. Available online: https://lora-alliance.org/resource-hub/what-lorawanrJan (accessed on 25 January 2020).
- CEPT, Electronic Communications Committee. ERC Recommendation 70-03. Available online: https://www.ecodocdb.dk/download/25c41779-cd6e/Rec7003e.pdf (accessed on 15 July 2020).
- Goursaud, C.; Gorce, J.M. Dedicated networks for IoT: PHY/MAC state of the art and challenges. EAI Endorsed Trans. Internet Things 2015. [Google Scholar] [CrossRef]
- Capuzzo, M.; Magrin, D.; Zanella, A. Confirmed traffic in LoRaWAN: Pitfalls and countermeasures. In Proceedings of the 2018 17th Annual Mediterranean Ad Hoc Networking Workshop (Med-Hoc-Net), Capri, Italy, 20–22 June 2018; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Iova, O.; Murphy, A.; Picco, G.P.; Ghiro, L.; Molteni, D.; Ossi, F.; Cagnacci, F. LoRa from the city to the mountains: Exploration of hardware and environmental factors. In Proceedings of the 2017 International Conference on Embedded Wireless Systems and Networks, Uppsala, Sweden, 20–22 February 2017. [Google Scholar]
- Petajajarvi, J.; Mikhaylov, K.; Roivainen, A.; Hanninen, T.; Pettissalo, M. On the coverage of LPWANs: Range evaluation and channel attenuation model for LoRa technology. In Proceedings of the 2015 14th International Conference on ITS Telecommunications (ITST), Copenhagen, Denmark, 2–4 December 2015; pp. 55–59. [Google Scholar]
- Bankov, D.; Khorov, E.; Lyakhov, A. On the limits of LoRaWAN channel access. In Proceedings of the 2016 International Conference on Engineering and Telecommunication (EnT), Dolgoprudny, Russia, 29–30 November 2016; pp. 10–14. [Google Scholar]
- Eletreby, R.; Zhang, D.; Kumar, S.; Yağan, O. Empowering low-power wide area networks in urban settings. In Proceedings of the Conference of the ACM Special Interest Group on Data Communication (SIGCOM), Los Angeles, CA, USA, 21–25 August 2017; pp. 309–321. [Google Scholar]
- Gadre, A.; Yi, F.; Rowe, A.; Iannucci, B.; Kumar, S. Quick (and Dirty) Aggregate Queries on Low-Power WANs. In Proceedings of the 2020 The 19th ACM/IEEE Conference on Information Processing in Sensor Networks (IPSN), Sydney, Australia, 21–24 April 2020. [Google Scholar]
- Dongare, A.; Narayanan, R.; Gadre, A.; Luong, A.; Balanuta, A.; Kumar, S.; Iannucci, B.; Rowe, A. Charm: Exploiting geographical diversity through coherent combining in low-power wide-area networks. In Proceedings of the 2018 17th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Porto, Portugal, 11–13 April 2018; pp. 60–71. [Google Scholar]
- Polonelli, T.; Brunelli, D.; Benini, L. Slotted aloha overlay on lorawan-a distributed synchronization approach. In Proceedings of the 2018 IEEE 16th International Conference on Embedded and Ubiquitous Computing (EUC), Bucharest, Romania, 29–31 October 2018; pp. 129–132. [Google Scholar]
- Ramirez, C.G.; Sergeyev, A.; Dyussenova, A.; Iannucci, B. LongShoT: Long-range synchronization of time. In Proceedings of the 18th International Conference on Information Processing in Sensor Networks (IPSN), Montreal, QC, Canada, 16–18 April 2019; pp. 289–300. [Google Scholar]
- Gao, S.; Zhang, X.; Du, C.; Ji, Q. A Multichannel Low-Power Wide-Area Network With High-Accuracy Synchronization Ability for Machine Vibration Monitoring. IEEE Internet Things J. 2019, 6, 5040–5047. [Google Scholar] [CrossRef]
- World Health Organization. Ambient Air Pollution: A Global Assessment of Exposure and Burden of Disease; World Health Organization: Geneva, Switzerland, 2016. [Google Scholar]
- US Environmental Protection Agency and US Environmental Protection Agency, Office of Air Quality Planning and Standards, Outreach and Information Division. Air Quality Index: A Guide to Air Quality and Your Health. EPA-456/F-14-002. Research Triangle Park, NC: 2014. Available online: https://www.airnow.gov/air-quality-index-publications/ (accessed on 25 January 2020).
- Rizzi, M.; Depari, A.; Ferrari, P.; Flammini, A.; Rinaldi, S.; Sisinni, E. Synchronization Uncertainty Versus Power Efficiency in LoRaWAN Networks. IEEE Trans. Instrum. Meas. 2019, 68, 1101–1111. [Google Scholar] [CrossRef]
- Magrin, D.; Centenaro, M.; Vangelista, L. Performance evaluation of LoRa networks in a smart city scenario. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–7. [Google Scholar]
- Ben Khalifa, A.; Stanica, R. Performance Evaluation of Channel Access Methods for Dedicated IoT Networks. In Proceedings of the 2019 Wireless Days (WD), Manchester, UK, 24–26 April 2019. [Google Scholar]
- Ortín, J.; Cesana, M.; Redondi, A. How do ALOHA and Listen Before Talk Coexist in LoRaWAN? In Proceedings of the 2018 IEEE 29th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Bologna, Italy, 9–12 September 2018. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel | Central Frequency (MHz) | Duty Cycle | Regulatory Regime | Max Effective Radiated Power (ERP) |
|---|---|---|---|---|
| 1 | 868.1 | |||
| 2 | 868.3 | 1% | h 1.5 | 14 dBm |
| 3 | 868.5 | |||
| 4 | 868.85 | 0.1% | h 1.6 | 14 dBm |
| 5 | 869.05 | |||
| 6 | 869.525 | 10% | h 1.7 | 27 dBm |
| MA | Monitoring Application |
|---|---|
| GW | Gateway |
| ED | End Device |
| NS | Network Sever |
| F | Number of frequency channels the GW simultaneously listens to, , 6 or 8 |
| M | Maximum number of messages simultaneously demodulated by the GW, also called number of receive paths of the GW, |
| Synchronization Period | |
| Monitoring Period | |
| Time Window | |
| Transmission Time | |
| The clock of any ED is synchronized within to the GW clock | |
| Synchronization guard time between a downlink synchronization message followed by an uplink monitoring message, or vice-versa | |
| Monitoring guard time between two uplink monitoring messages | |
| Spreading Factor, | |
| Transmission Time of a monitoring message using the spreading factor | |
| Maximum number of EDs supported by OAPM_D | |
| Maximum number of EDs supported by FAPM |
| Channels | Sub-Clusters | Members | Transmission Duration |
|---|---|---|---|
| 3, 6 or 8 | 1 | SF7, SF8, SF9, SF10, SF11, SF12, SF9, SF10 | |
| 2 | SF8, SF9, SF10, SF11, SF9, SF10, SF9, SF10 | ||
| 3 | SF8, SF9, SF10, SF9 |
| OAPM_D | OAPM_O | FAPM | FAPM_O | |
|---|---|---|---|---|
| TDMA Based | TDMA Based | FDMA Based | FDMA Based | |
| Channel | Only one channel is used: the same for all clusters | Several channels can be used by a same sub-cluster | One channel per cluster, at most M channels | One channel per cluster, at most M channels |
| Receive Path (RP) per channel | Up to six RPs (one per SF) in a same sub-cluster | Several RPs per channel in a same sub-cluster, total # of RPs | One RP per channel in each cluster | Several RPs per channel, total # of RPs , a single channel per cluster |
| Clusters | Yes | Yes | Yes | Yes |
| Sub-cluster | EDs with ≠ SFs | EDs with possible = SFs but ≠ channels | No sub-cluster | EDs with ≠ SFs |
| Transmissions of different clusters | Sequential | Sequential | Parallel | Parallel |
| Transmissions of sub-clusters in a same cluster | Sequential | Sequential | No sub-cluster | Sequential |
| Transmissions of EDs in a same sub-cluster | Up to min(# of RPs assigned to this sub-cluster, # of ≠ SFs in the sub-cluster) transmissions in parallel | Up to min(# of RPs assigned to this sub-cluster, # of ≠ SFs in the sub-cluster × # of Freq assigned to this sub-cluster) transmissions in parallel | Only one transmission | Up to min(# of RPs assigned to this sub-cluster, # of ≠ SFs in the sub-cluster) transmissions in parallel |
| Parameter | Value |
|---|---|
| Bandwidth | 125 KHz |
| Channels | Default Channels 868.1, 868.2, 868.3 MHz |
| Spreading Factors | 7, 8, 9, 10, 11, 12 |
| Battery capacity | 1000 mAh |
| TX Power | 14 dBm corresponding to mA |
| RX power | mA |
| Idle power | mA |
| Sleep power | A |
| Supply Voltage | V |
| Number of EDs | [0…5000] |
| Area radius | 6000 m |
| Data payload | 21 bytes |
| Uplink message Type | Unconfirmed |
| Monitoring Period | 400 s, 800 s, 1200 s, 1600 s |
| Synchronization Period | 1602 s |
| Simulation Time | 32,000 s |
| Spreading Factor | ED Duty_cycle (%) |
|---|---|
| 0.08 | |
| 0.09 | |
| 0.11 | |
| 0.15 | |
| 0.23 | |
| 0.39 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Haiahem, R.; Minet, P.; Boumerdassi, S.; Azouz Saidane, L. Collision-Free Transmissions in an IoT Monitoring Application Based on LoRaWAN. Sensors 2020, 20, 4053. https://doi.org/10.3390/s20144053
Haiahem R, Minet P, Boumerdassi S, Azouz Saidane L. Collision-Free Transmissions in an IoT Monitoring Application Based on LoRaWAN. Sensors. 2020; 20(14):4053. https://doi.org/10.3390/s20144053
Chicago/Turabian StyleHaiahem, Rahim, Pascale Minet, Selma Boumerdassi, and Leila Azouz Saidane. 2020. "Collision-Free Transmissions in an IoT Monitoring Application Based on LoRaWAN" Sensors 20, no. 14: 4053. https://doi.org/10.3390/s20144053