Doubly Covariance Matrix Reconstruction Based Blind Beamforming for Coherent Signals


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation
3. Proposed Approach
3.1. Doubly Covariance Matrix Reconstruction
3.1.1. Covariance Matrix Reconstruction of CDSP Interferences
3.1.2. Covariance Matrix Reconstruction of Normal Interferences
3.2. Unblinding Desired Coherent Signals
| Algorithm 1 Steps of doubly covariance matrix based blind beamforming approach. |
| Part 1: doubly covariance matrix reconstruction |
| 1. eigendecomposing the SCM . |
| 2. = minimum eigenvalue of . |
| 3. Q = number of spectrum peaks sufficiently larger than . |
| 4. = spectrum peaks of dominant value among Q peaks. |
| 5. reconstructing covariance matrix for the CDSP interferences as |
| 6. decomposing SCM with noise components removed as |
| 7. reconstructing covariance matrix for the normal interferences as |
| . |
| Part 2: unblinding desired coherent signals. |
| 8. reconstructing the INC matrix according to (16) and obtaining based on (17). |
| 9. estimating the CSV of desired coherent signals |
| . |
| Final calculating the weighting vector |
4. Simulation
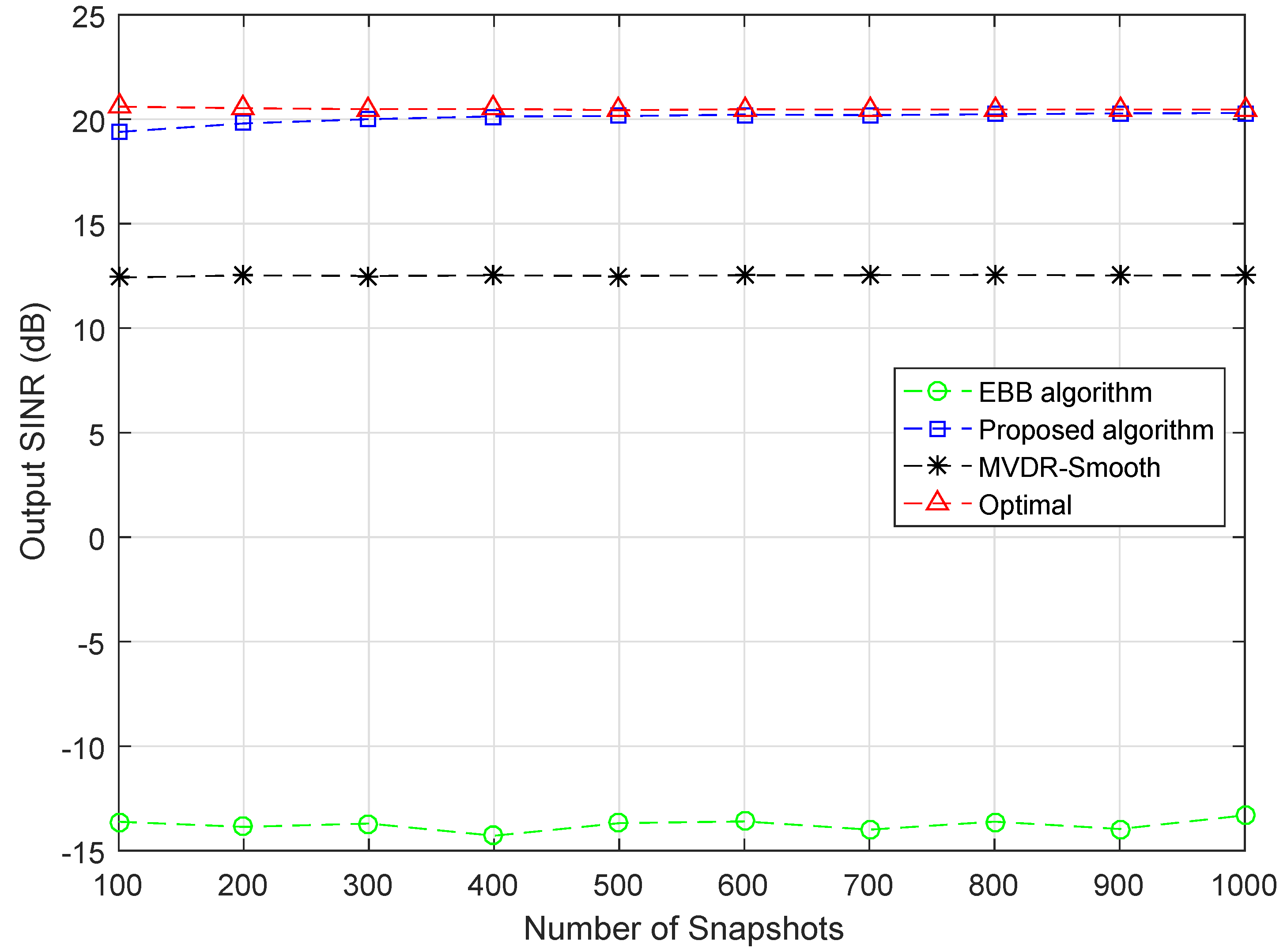
4.1. Simulation Example 1
4.2. Simulation Example 2
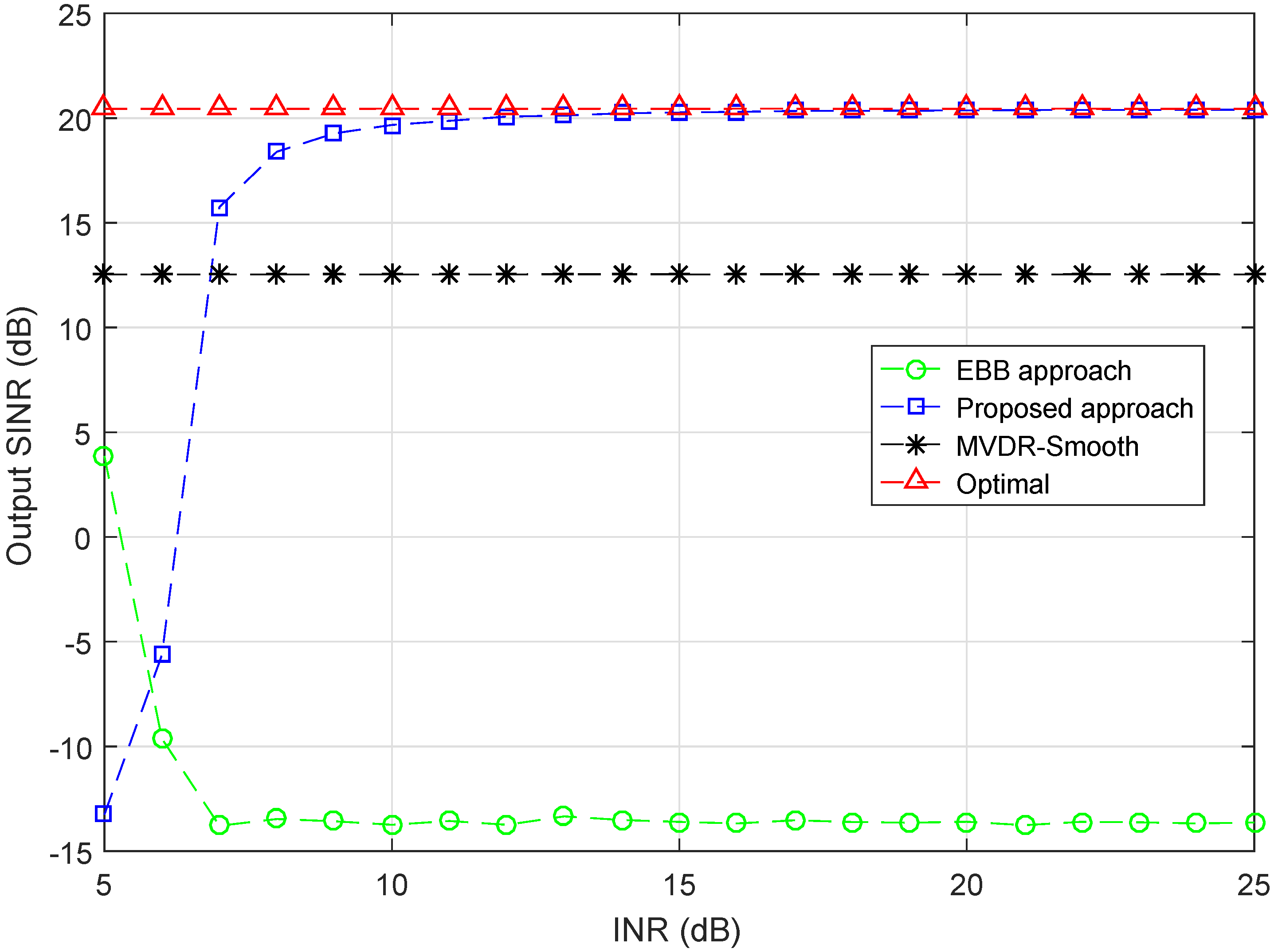
4.3. Simulation Example 3
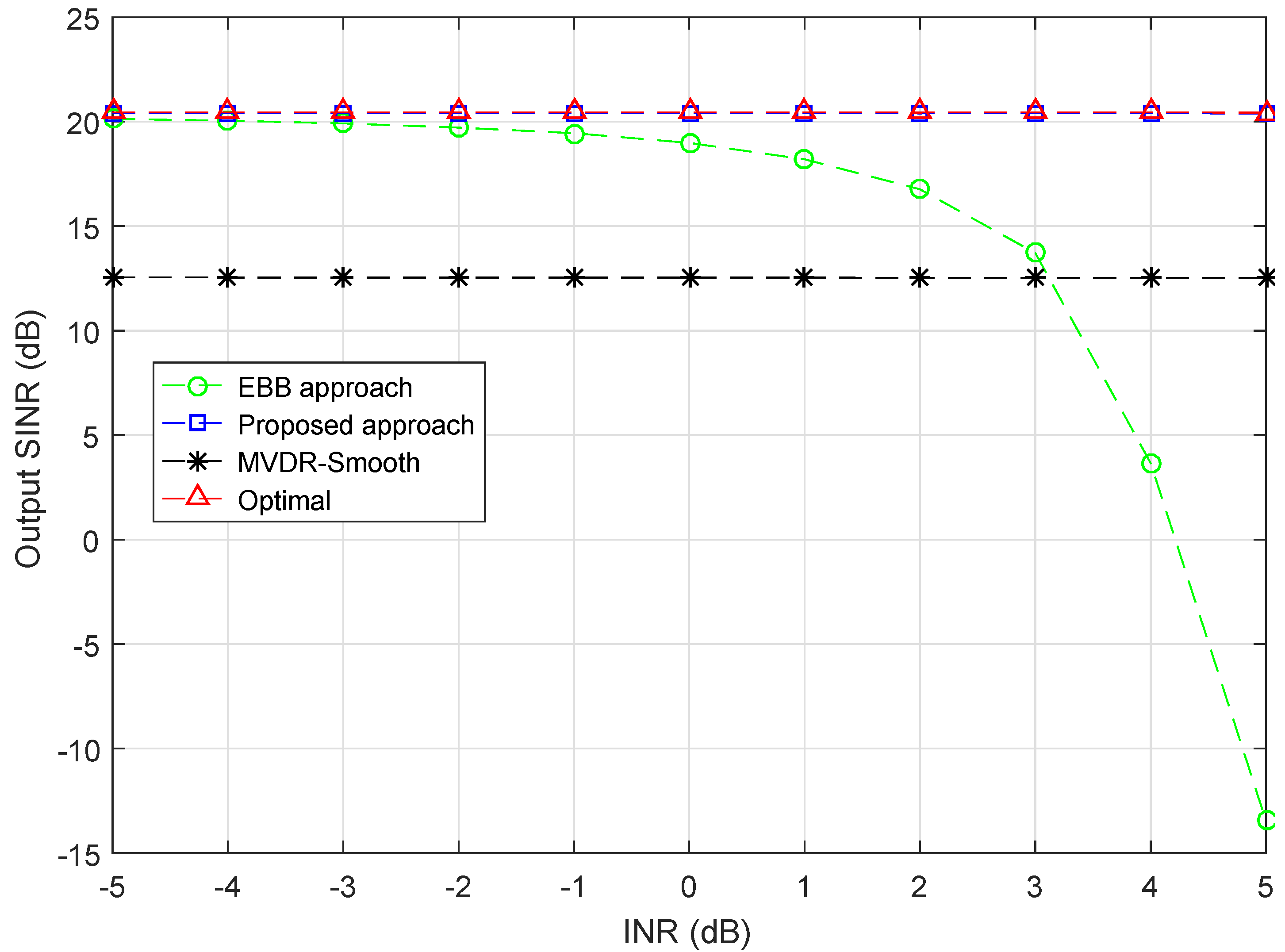
4.4. Simulation Example 4
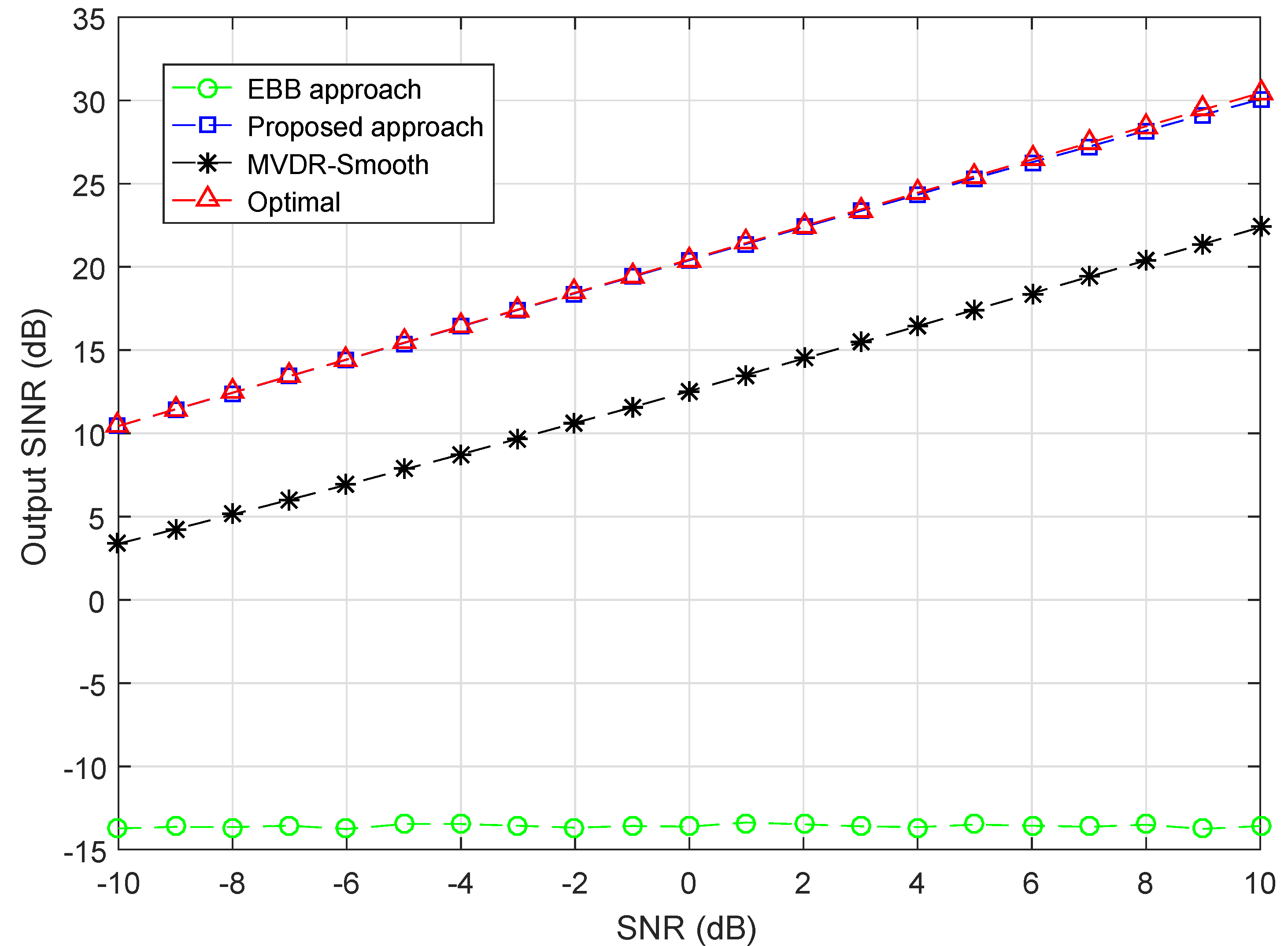
4.5. Simulation Example 5
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yang, X.; Xie, J.; Li, H.; He, Z. Robust adaptive beamforming of coherent signals in the presence of the unknown mutual coupling. IET Commun. 2017, 12, 75–81. [Google Scholar] [CrossRef]
- Li, W.; Yang, J.; Zhang, Y.; Lu, J. Robust wideband beamforming method for linear frequency modulation signals based on digital dechirp processing. IET Radar Sonar Navig. 2018, 13, 283–289. [Google Scholar] [CrossRef]
- Yu, H.; Feng, D.; Nie, W. Robust and fast beamforming with magnitude response constraints for multiple-input multiple-output radar. IET Radar Sonar Navig. 2016, 10, 610–616. [Google Scholar] [CrossRef]
- Xie, N.; Zhou, Y.; Xia, M.; Tang, W. Fast blind adaptive beamforming algorithm with interference suppression. IEEE Trans. Veh. Technol. 2008, 57, 1985–1988. [Google Scholar]
- Liao, B.; Tsui, K.; Chan, S. Robust beamforming with magnitude response constraints using iterative second-order cone programming. IEEE Trans. Antennas Propag. 2011, 59, 3477–3482. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Z.; Liu, K.; Wang, W.Q.; Yang, Y.; Yang, J. Robust adaptive beamforming against mutual coupling based on mutual coupling coefficients estimation. IEEE Trans. Veh. Technol. 2017, 66, 9124–9133. [Google Scholar] [CrossRef]
- Yu, L.; Liu, W.; Langley, R.J. Robust beamforming methods for multipath signal reception. Digit. Signal Process. 2010, 20, 379–390. [Google Scholar] [CrossRef]
- Agrawal, M.; Abrahamsson, R.; Åhgren, P. Optimum beamforming for a nearfield source in signal-correlated interferences. Signal Process. 2006, 86, 915–923. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, W. Robust beamforming for coherent signals based on the spatial-smoothing technique. Signal Process. 2012, 92, 2747–2758. [Google Scholar] [CrossRef]
- Gu, Z.; Gunawan, E. A performance analysis of multipath direction finding with temporal smoothing. IEEE Signal Process. Lett. 2003, 10, 200–203. [Google Scholar]
- He, J.; Ahmad, M.O.; Swamy, M. Joint space-time parameter estimation for multicarrier CDMA systems. IEEE Trans. Veh. Technol. 2012, 61, 3306–3311. [Google Scholar] [CrossRef]
- Cardoso, J.F.; Souloumiac, A. Blind beamforming for non-Gaussian signals. Proc. Inst. Elect. F 1993, 140, 362–370. [Google Scholar] [CrossRef] [Green Version]
- Van Der Veen, A.J. Algebraic methods for deterministic blind beamforming. Proc. IEEE 1998, 86, 1987–2008. [Google Scholar] [CrossRef]
- Shynk, J.J.; Gooch, R.P. The constant modulus array for cochannel signal copy and direction finding. IEEE Trans. Signal Process. 1996, 44, 652–660. [Google Scholar] [CrossRef]
- Chen, Y.; Le-Ngoc, T.; Champagne, B.; Xu, C. Recursive least squares constant modulus algorithm for blind adaptive array. IEEE Trans. Signal Process. 2004, 52, 1452–1456. [Google Scholar] [CrossRef]
- Van Der Veen, A.J.; Paulraj, A. An analytical constant modulus algorithm. IEEE Trans. Signal Process. 1996, 44, 1136–1155. [Google Scholar] [CrossRef] [Green Version]
- Van Der Veen, A.J. Analytical method for blind binary signal separation. IEEE Trans. Signal Process. 1997, 45, 1078–1082. [Google Scholar] [CrossRef] [Green Version]
- Van Der Veen, A.J. Asymptotic properties of the algebraic constant modulus algorithm. IEEE Trans. Signal Process. 2001, 49, 1796–1807. [Google Scholar] [CrossRef]
- He, Z.; Chen, Y. Robust blind beamforming using neural network. Proc. Inst. Electr. Eng. Radar Sonar Navig. 2000, 147, 41–46. [Google Scholar] [CrossRef]
- Alkhateeb, A.; Alex, S.; Varkey, P.; Li, Y.; Qu, Q.; Tujkovic, D. Deep Learning Coordinated Beamforming for Highly-Mobile Millimeter Wave Systems. IEEE Access 2018, 6, 37328–37348. [Google Scholar] [CrossRef]
- Castaldi, G.; Galdi, V.; Gerini, G. Evaluation of a Neural-Network-Based Adaptive Beamforming Scheme with Magnitude-Only Constraints. Prog. Electromagn. Res. B 2009, 11, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Tang, J. Blind beamforming technique for reception of multipath coherent signals. IEEE Commun. Lett. 2016, 20, 1453–1456. [Google Scholar] [CrossRef]
- Zhang, L.; Liao, B.; Huang, L.; Guo, C. An eigendecomposition-based approach to blind beamforming in a multipath environment. IEEE Commun. Lett. 2016, 21, 322–325. [Google Scholar] [CrossRef]
- Harmanci, K.; Tabrikian, J.; Krolik, J.L. Relationships between adaptive minimum variance beamforming and optimal source localization. IEEE Trans. Signal Process. 2000, 48, 1–12. [Google Scholar] [CrossRef]
- Gu, Y.; Leshem, A. Robust adaptive beamforming based on interference covariance matrix reconstruction and steering vector estimation. IEEE Trans. Signal Process. 2012, 60, 3881–3885. [Google Scholar]
- Gu, Y.; Goodman, N.A.; Hong, S.; Li, Y. Robust adaptive beamforming based on interference covariance matrix sparse reconstruction. Signal Process. 2014, 96, 375–381. [Google Scholar] [CrossRef]
- Van Trees, H.L. Optimum Array Processing; Wiley: New York, NY, USA, 2002. [Google Scholar]
- Bunch, J.R.; Nielsen, C.P.; Sorensen, D.C. Rank-one modification of the symmetric eigenproblem. Numer. Math. 1978, 31, 31–48. [Google Scholar] [CrossRef]





© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, Z.; Fan, C.; Zhu, J.; Huang, X. Doubly Covariance Matrix Reconstruction Based Blind Beamforming for Coherent Signals. Sensors 2020, 20, 3595. https://doi.org/10.3390/s20123595
Xie Z, Fan C, Zhu J, Huang X. Doubly Covariance Matrix Reconstruction Based Blind Beamforming for Coherent Signals. Sensors. 2020; 20(12):3595. https://doi.org/10.3390/s20123595
Chicago/Turabian StyleXie, Zhuang, Chongyi Fan, Jiahua Zhu, and Xiaotao Huang. 2020. "Doubly Covariance Matrix Reconstruction Based Blind Beamforming for Coherent Signals" Sensors 20, no. 12: 3595. https://doi.org/10.3390/s20123595