Towards Attention-Based Convolutional Long Short-Term Memory for Travel Time Prediction of Bus Journeys



Abstract
:1. Introduction
- (1)
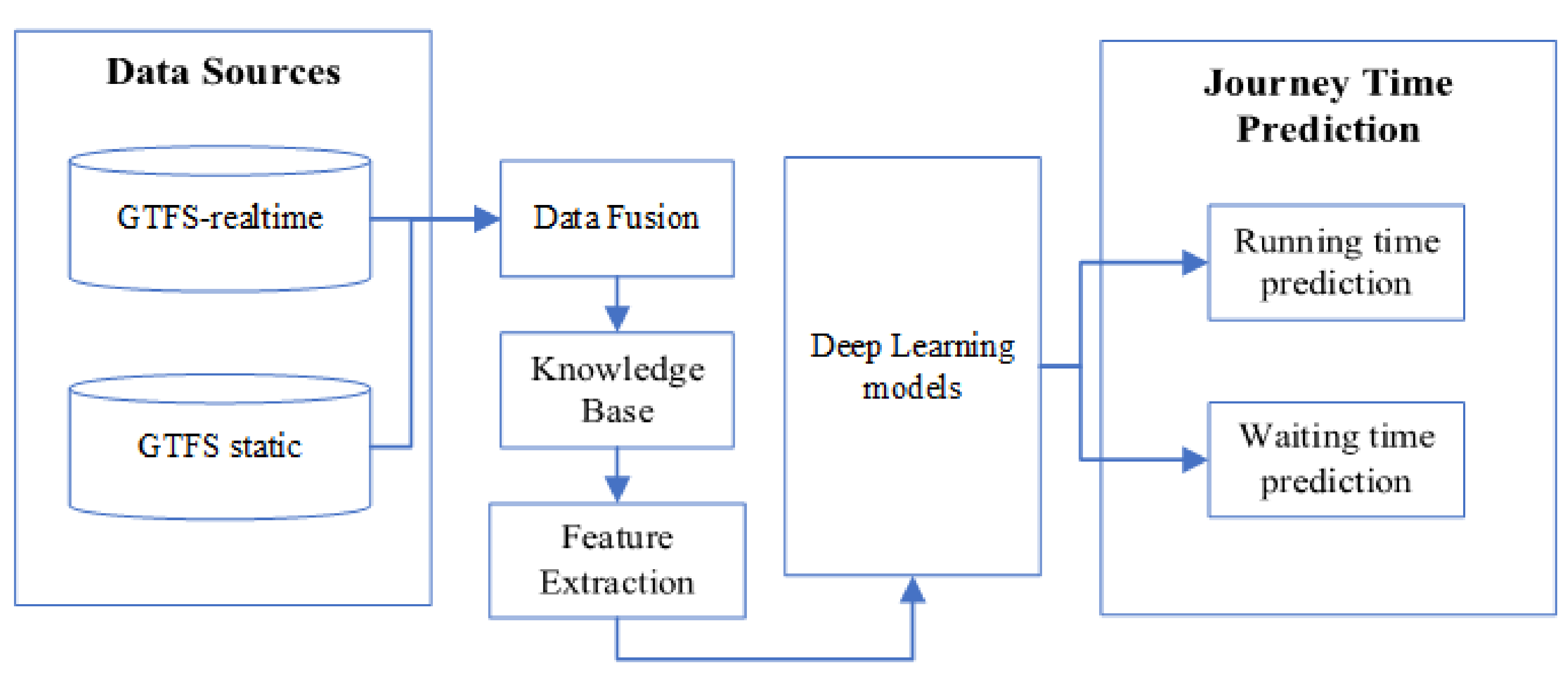
- We designed and developed an open-source data collection framework that can automatically collect and pre-process large amounts of high-quality data over a long period without involving personal privacy, for example, an entire season or even several years.
- (2)
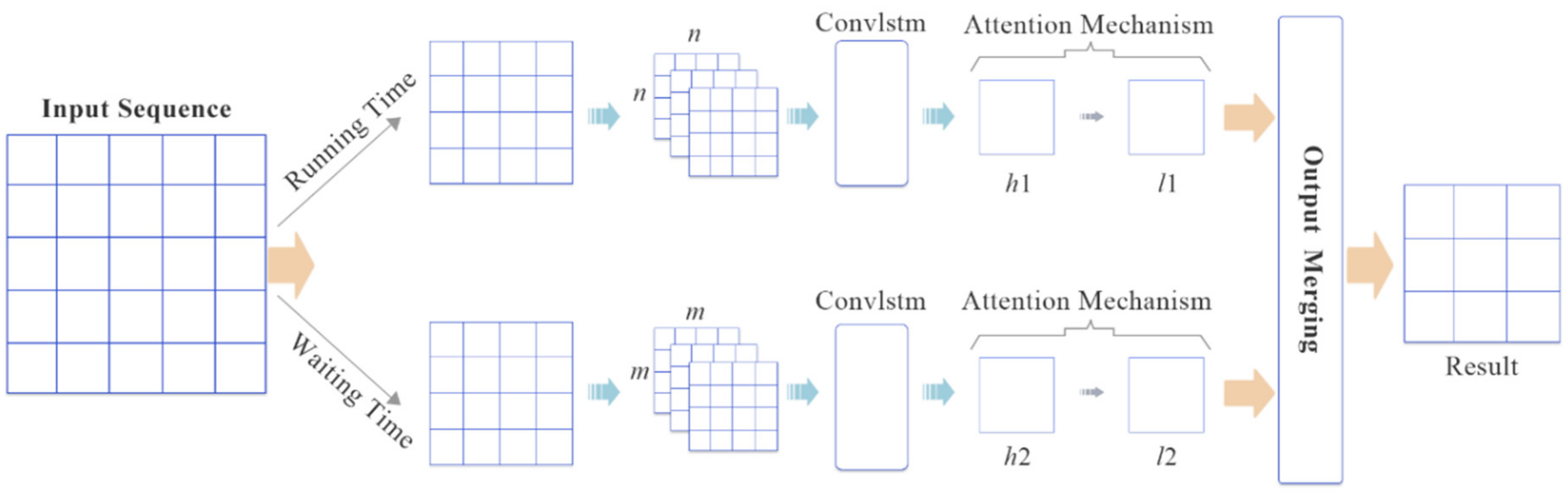
- This paper proposes a hybrid model that applies the ConvLSTM network with an attention mechanism to explore a suitable model for the bus journey time prediction on open data.
- (3)
- We also discuss input features for journey travel time prediction and suggest directions for future research.
2. Related Works
3. Methodology
3.1. Bus Travel Time
3.2. Leveraging Machine Learning and Logical Reasoning
3.3. Bus Journey Travel Time with Multi-Step Time Series Prediction
| Algorithm 1 Attention-Based ConvLSTM Training Algorithm |
| Require: |
| Historical running time and waiting time observations: |
| Sequence lenght: n; |
| Lengths of running time, waiting time: lR, lD; |
| running time: R; |
| waiting time: D. |
| Ensure: Attention-based ConvLSTM Model |
| for epoch = max–epoch do |
| Perform forward propagation recurrently using Equation (2)–(10) to |
| calculate |
| compute output error: |
| merging the predicted outputs to obtain the total travel time: |
| end for |
4. Experiments and Discussion
4.1. Dataset Description and Preprocessing
4.2. Evaluation Metrics and Results
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Stawiarska, E.; Sobczak, P. The impact of Intelligent Transportation System implementations on the sustainable growth of passenger transport in EU regions. Sustainability 2018, 10, 1318. [Google Scholar] [CrossRef] [Green Version]
- U.N. ESCAP Information and Communications Technology and Disaster Risk Reduction Division. Intelligent Transportation Systems for Sustainable Development in Asia and the Pacific. 2015. Available online: http://www.unescap.org/sites/default/files/ITS.pdf (accessed on 3 May 2020).
- Guerrero-Ibanez, J.A.; Zeadally, S.; Contreras-Castillo, J. Integration challenges of intelligent transportation systems with connected vehicle, cloud computing, and internet of things technologies. IEEE Wirel. Commun. 2015, 22, 122–128. [Google Scholar] [CrossRef]
- JSCE. Intelligent Transport Systems (ITS) Introduction Guide. 2016. Available online: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&cad=rja&uact=8&ved=2ahUKEwjvybLj_oXqAhXTiVwKHe5fBU0QFjABegQIAxAB&url=http%3A%2F%2Fwww.jsce-int.org%2Fsystem%2Ffiles%2FITS_Introduction_Guide_2.pdf&usg=AOvVaw3NJG9e6dawQZ9Aiw58szNY (accessed on 11 June 2020).
- Duan, Y.J.; Lv, Y.S.; Wang, F.-Y. Travel time prediction with LSTM neural network. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 1053–1058. [Google Scholar]
- Sullivan, A.O.; Pereira, F.C.; Zhao, J.; Koutso poulos, H.N. Uncertainty in Bus Arrival Time Predictions: Treating Heteroscedasticity with a Metamodel Approach. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3286–3296. [Google Scholar] [CrossRef] [Green Version]
- He, P.; Jiang, G.; Lam, S.-K.; Tang, D. Travel-Time Prediction of Bus Journey with Multiple Bus Trips. IEEE Trans. Intell. Transp. Syst. 2019, 20, 4192–4205. [Google Scholar] [CrossRef]
- Petersen, N.C.; Rodrigues, F.; Pereira, F.C. Multi-output bus travel time prediction with convolutional LSTM neural network. Expert Syst. Appl. 2019, 120, 426–435. [Google Scholar] [CrossRef] [Green Version]
- Ran, X.; Shan, Z.; Fang, Y.; Lin, C. An LSTM-based method with attention mechanism for travel time prediction. Sensors 2019, 19, 861. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Menouar, H.; Guvenc, I.; Akkaya, K.; Uluagac, A.S.; Kadri, A.; Tuncer, A. UAV-Enabled Intelligent Transportation Systems for the Smart City: Applications and Challenges. IEEE Commun. Mag. 2017, 55, 22–28. [Google Scholar] [CrossRef]
- Maimaris, A.; Papageorgiou, G. A review of Intelligent Transportation Systems from a communications technology perspective. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 54–59. [Google Scholar]
- Wu, J.; Huang, Y.; Kong, J.; Tang, Q.; Huang, X. A study on the dependability of software defined networks. In Proceedings of the International Conference on Materials Engineering and Information Technology Applications (MEITA 2015), Guilin, China, 30–31 August 2015; pp. 314–318. [Google Scholar]
- Patel, P.; Narmawala, Z.; Thakkar, A. A Survey on Intelligent Transportation System Using Internet of Things. In Emerging Research in Computing, Information, Communication and Applications; Springer: Berlin/Heidelberg, Germany, 2019; pp. 231–240. [Google Scholar]
- Zhang, J.; Wang, F.; Wang, K.; Lin, W.; Xu, X.; Chen, C. Data-Driven Intelligent Transportation Systems: A Survey. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1624–1639. [Google Scholar] [CrossRef]
- Qureshi, K.N.; Abdullah, A.H. A survey on intelligent transportation systems. Middle-East J. Sci. Res. 2013, 15, 629–642. [Google Scholar]
- Yuan, Y.; Wang, F.-Y. Towards blockchain-based intelligent transportation systems. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 2663–2668. [Google Scholar]
- Zhang, G.; Wang, Y. Machine Learning and Computer Vision-Enabled Traffic Sensing Data Analysis and Quality Enhancement. In Data-Driven Solutions to Transportation Problems; Elsevier: Amsterdam, The Netherlands, 2019; pp. 51–79. [Google Scholar]
- Zhu, L.; Yu, F.R.; Wang, Y.; Ning, B.; Tang, T. Big Data Analytics in Intelligent Transportation Systems: A Survey. IEEE Trans. Intell. Transp. Syst. 2019, 20, 383–398. [Google Scholar] [CrossRef]
- Duleba, S.; Moslem, S. Examining Pareto optimality in analytic hierarchy process on real Data: An application in public transport service development. Expert Syst. Appl. 2019, 116, 21–30. [Google Scholar] [CrossRef]
- El Faouzi, N.-E.; Leung, H.; Kurian, A. Data fusion in intelligent transportation systems: Progress and challenges—A survey. Inf. Fusion 2011, 12, 4–10. [Google Scholar] [CrossRef]
- Bachmann, C.; Abdulhai, B.; Roorda, M.J.; Moshiri, B. A comparative assessment of multi-sensor data fusion techniques for freeway traffic speed estimation using microsimulation modeling. Transp. Res. Part C Emerg. Technol. 2013, 26, 33–48. [Google Scholar] [CrossRef]
- Shahrbabaki, M.R.; Safavi, A.A.; Papageorgiou, M.; Papamichail, I. A data fusion approach for real-time traffic state estimation in urban signalized links. Transp. Res. Part C Emerg. Technol. 2018, 92, 525–548. [Google Scholar] [CrossRef]
- Chang, T.-H.; Chen, A.Y.; Chang, C.-W.; Chueh, C.-H. Traffic speed estimation through data fusion from heterogeneous sources for first response deployment. J. Comput. Civ. Eng. 2014, 28, 04014018. [Google Scholar] [CrossRef]
- Shen, L.; Hadi, M. Practical approach for travel time estimation from point traffic detector data. J. Adv. Transp. 2013, 47, 526–535. [Google Scholar] [CrossRef]
- Spring, G. Knowledge-based systems in transportation. In Artificial Intelligence in Transportation: Information for Application, Transportation Research Circular; No. E-C113; Transportation Research Board of the National Academies: Washington, DC, USA, 2007; pp. 7–16. [Google Scholar]
- Lee, W.-H.; Tseng, S.-S.; Tsai, S.-H. A knowledge based real-time travel time prediction system for urban network. Expert Syst. Appl. 2009, 36, 4239–4247. [Google Scholar] [CrossRef]
- Chow, A.; Dadok, V.; Dervisoglu, G.; Gomes, G.; Horowitz, R.; Kurzhanskiy, A.; Kwon, J.; Lu, X.-Y.; Muralidharan, A.; Norman, S. TOPL: Tools for operational planning of transportation networks. In Proceedings of the ASME 2008 Dynamic Systems and Control Conference, Ann Arbor, MI, USA, 20–22 October 2008; pp. 1035–1042. [Google Scholar]
- Ben-Akiva, M.; Bierlaire, M.; Burton, D.; Koutsopoulos, H.N.; Mishalani, R. Network state estimation and prediction for real-time traffic management. Netw. Spat. Econ. 2001, 1, 293–318. [Google Scholar] [CrossRef]
- DYNASMART-X Evaluation for Real-Time TMC Application: CHART Test Bed. Available online: https://d1wqtxts1xzle7.cloudfront.net/44371326/DYNASMART-X_EVALUATION_FOR_REAL-TIME_TMC20160403-26688-1fbhpxs.pdf?1459742206=&response-content-disposition=inline%3B+filename%3DDYNASMART_X_evaluation_for_real_time_TMC.pdf&Expires=1591969100&Signature=T1g3Zq8PpabOFTvtZAjj~ptFsB2blEeGyfiGklN~FdVm8OFkmSrjsVyd7~sv~XcC9kzN~lA9t1zVGdMlDHDoOe1oOWpYjjhUUIrnfLdPP7gWbCqSfJatQEjUKrQ7-yPC-Kd3eT7FkdZRAWCv6XBQWrm5WWToLYQuiSIk~hUh-PRp3qOTDjNZvQUpKeMCmHq3gCYyex4WIBUAmgpIdXVNzcaXSjpIAgg1mWPBeBlalYWv-3VdDSBPBzYFZXWioajX1aaQFo2ATaMxEyt50ePasxB9OxVRi-UmT0wAW1rmrHkVaS6GM8JfNEnx9w0Wcm9Kk0smNClhV4HRYJKsjCQF5w__&Key-Pair-Id=APKAJLOHF5GGSLRBV4ZA (accessed on 15 May 2020).
- Chrobok, R.; Hafstein, S.F.; Pottmeier, A. Olsim: A new generation of traffic information systems. Forsch. Wiss. Rechn. 2004, 63, 11–25. [Google Scholar]
- Casas, J.; Ferrer, J.L.; Garcia, D.; Perarnau, J.; Torday, A. Traffic simulation with aimsun. In Fundamentals of Traffic Simulation; Springer: Berlin/Heidelberg, Germany, 2010; pp. 173–232. [Google Scholar]
- Oh, S.; Byon, Y.-J.; Jang, K.; Yeo, H. Short-term travel-time prediction on highway: A review on model-based approach. KSCE J. Civ. Eng. 2018, 22, 298–310. [Google Scholar] [CrossRef]
- Kumar, V.; Kumar, B.A.; Vanajakshi, L.; Subramanian, S.C. Comparison of model based and machine learning approaches for bus arrival time prediction. In Proceedings of the 93rd Annual Meeting, Washington, DC, USA, 12–16 January 2014; pp. 14–2518. [Google Scholar]
- Hou, Y.; Edara, P. Network scale travel time prediction using deep learning. Transp. Res. Rec. 2018, 2672, 115–123. [Google Scholar] [CrossRef]
- Yu, B.; Wang, H.; Shan, W.; Yao, B. Prediction of bus travel time using random forests based on near neighbors. Comput. Aided Civ. Infrastruct. Eng. 2018, 33, 333–350. [Google Scholar] [CrossRef]
- Google. Google Transit APIs. Available online: https://developers.google.com/transit/ (accessed on 21 August 2019).
- Schmidtke, H.R. A survey on verification strategies for intelligent transportation systems. J. Reliab. Intell. Environ. 2018, 4, 211–224. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.-Y.; Wong, W.-K.; Woo, W.-C. Convolutional LSTM Network: A machine learning approach for precipitation nowcasting. In Proceedings of the 28th International Conference on Neural Information Processing Systems, Montréal, QC, Canada, 7–10 December 2015; pp. 802–810. [Google Scholar]
- Luong, T.; Pham, H.; Manning, C.D. Effective Approaches to Attention-based Neural Machine Translation. In Proceedings of the 2015 Conference on Empirical Methods in Natural Language Processing, Lisbon, Portugal, 17–21 September 2015; pp. 1412–1421. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 5998–6008. [Google Scholar]
- Chorowski, J.K.; Bahdanau, D.; Serdyuk, D.; Cho, K.; Bengio, Y. Attention-based models for speech recognition. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 577–585. [Google Scholar]
- Liang, Y.; Ke, S.; Zhang, J.; Yi, X.; Zheng, Y. GeoMAN: Multi-level Attention Networks for Geo-sensory Time Series Prediction. In Proceedings of the IJCAI, Stockholm, Sweden, 13–19 July 2018; pp. 3428–3434. [Google Scholar]
- Zheng, G.; Mukherjee, S.; Dong, X.L.; Li, F. Opentag: Open attribute value extraction from product profiles. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, London, UK, 19–23 August 2018; pp. 1049–1058. [Google Scholar]
- NSW, T.F. General Transit Feed Specification (GTFS) and GTFS-Realtime (GTFS-R). Available online: https://opendata.transport.nsw.gov.au/documentation (accessed on 21 August 2019).
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Devin, M.; Ghemawat, S.; Irving, G.; Isard, M.; et al. TensorFlow: A system for large-scale machine learning. In Proceedings of the 12th USENIX conference on Operating Systems Design and Implementation, Savannah, GA, USA, 2–4 November 2016; pp. 265–283. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv preprint, 2014; arXiv:1412.6980. [Google Scholar]
- Greff, K.; Srivastava, R.K.; Koutník, J.; Steunebrink, B.R.; Schmidhuber, J. LSTM: A Search Space Odyssey. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 2222–2232. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Zheng, Y.; Qi, D. Deep spatio-temporal residual networks for citywide crowd flows prediction. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017; pp. 1655–1661. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| T | bus trip id T |
| n | number of bus stops in T |
| S | a bus stop in a trip T |
| bus departure time from the station S | |
| bus arrival time at the station S | |
| total time of a trip T | |
| R | actual running time in T |
| D | actual waiting time in T |
| predicted running time in T | |
| predicted waiting time in T | |
| actual value of evaluation metrics | |
| predicted value of evaluation metrics |
| Variable | Value |
|---|---|
| learning rate | 0.001 |
| epochs | 20 |
| batch size | 16 |
| loss | Mean Squared Error |
| optimizer | Adam |
| Models | RMSE (s) | MAE (s) | ||
|---|---|---|---|---|
| Mean | SD | Mean | SD | |
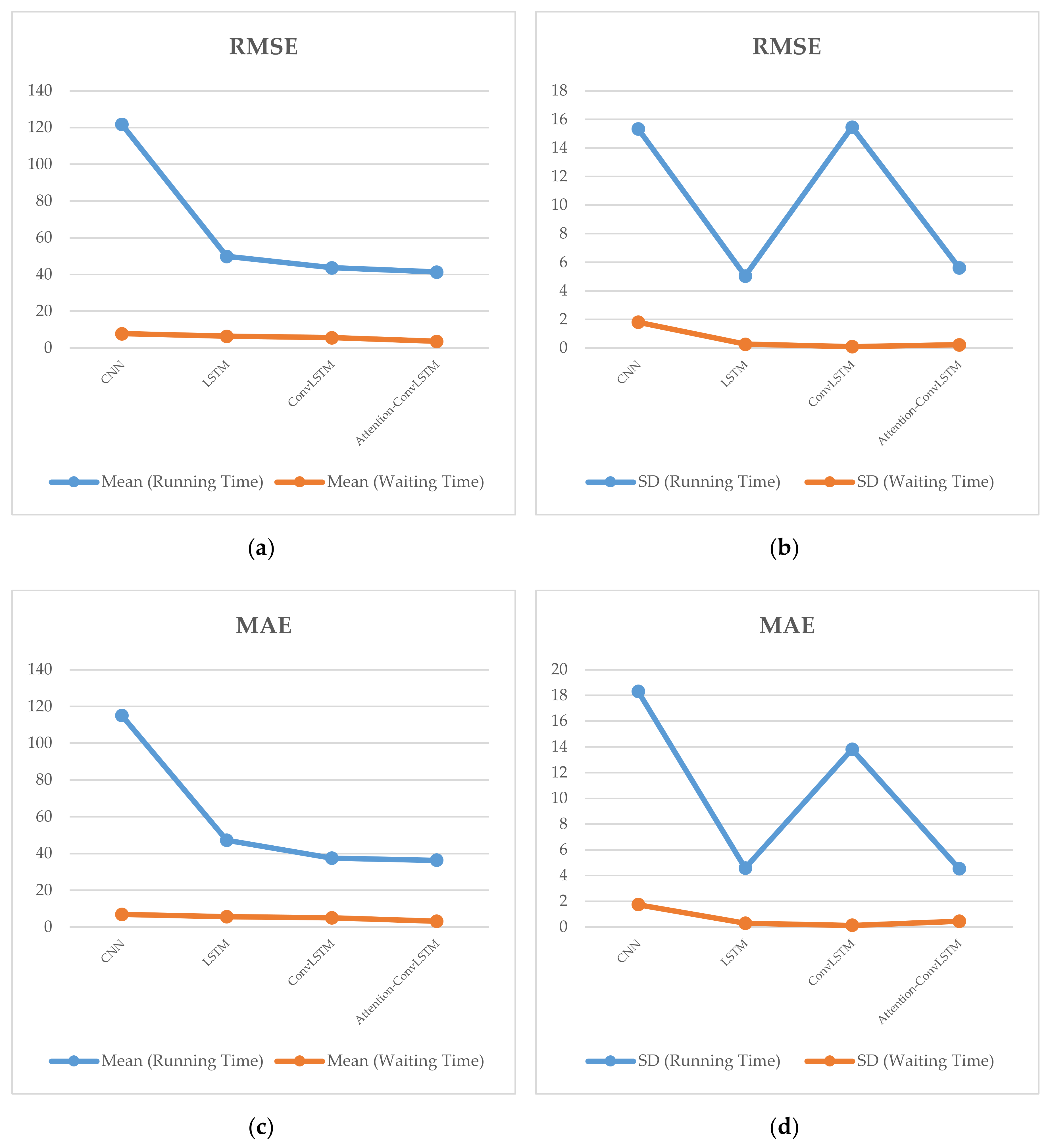
| CNN | 121.770 | 15.350 | 115.095 | 18.318 |
| LSTM | 49.849 | 5.046 | 47.146 | 4.583 |
| ConvLSTM | 43.720 | 15.468 | 37.533 | 13.821 |
| Attention-ConvLSTM | 41.449 | 5.623 | 36.328 | 4.539 |
| Models | RMSE (s) | MAE (s) | ||
|---|---|---|---|---|
| Mean | SD | Mean | SD | |
| CNN | 7.891 | 6.415 | 6.912 | 1.747 |
| LSTM | 6.415 | 0.283 | 5.544 | 0.284 |
| ConvLSTM | 5.683 | 0.113 | 5.060 | 0.134 |
| Attention-ConvLSTM | 3.740 | 0.227 | 3.166 | 0.441 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Wu, Q.; Shen, J.; Cai, C. Towards Attention-Based Convolutional Long Short-Term Memory for Travel Time Prediction of Bus Journeys. Sensors 2020, 20, 3354. https://doi.org/10.3390/s20123354
Wu J, Wu Q, Shen J, Cai C. Towards Attention-Based Convolutional Long Short-Term Memory for Travel Time Prediction of Bus Journeys. Sensors. 2020; 20(12):3354. https://doi.org/10.3390/s20123354
Chicago/Turabian StyleWu, Jianqing, Qiang Wu, Jun Shen, and Chen Cai. 2020. "Towards Attention-Based Convolutional Long Short-Term Memory for Travel Time Prediction of Bus Journeys" Sensors 20, no. 12: 3354. https://doi.org/10.3390/s20123354