A RPCA-Based ISAR Imaging Method for Micromotion Targets


Abstract
:1. Introduction
2. Signal Model and Problem Formulation
- 1.
- Point-scattering model can be satisfied, i.e., the radar echo is assumed to be a sum of dominant scatterers.
- 2.
- The radar echo satisfies the stop–go assumption, i.e., the target is assumed to be static during one pulse duration.
- 3.
- The 2-D imaging plane is unchanged in CPI.
- 4.
- The translational motion is compensated completely, thus, the target is equivalent to rotate around the image center, which indicates that the target can be stated as a turntable model.
- 5.
- The change of aspect angle of the target is so small that the instantaneous range can be approximated by its first-order Taylor expansion.
- 6.
- The range migration among the scatterers is so small that it can be ignored in CPI.
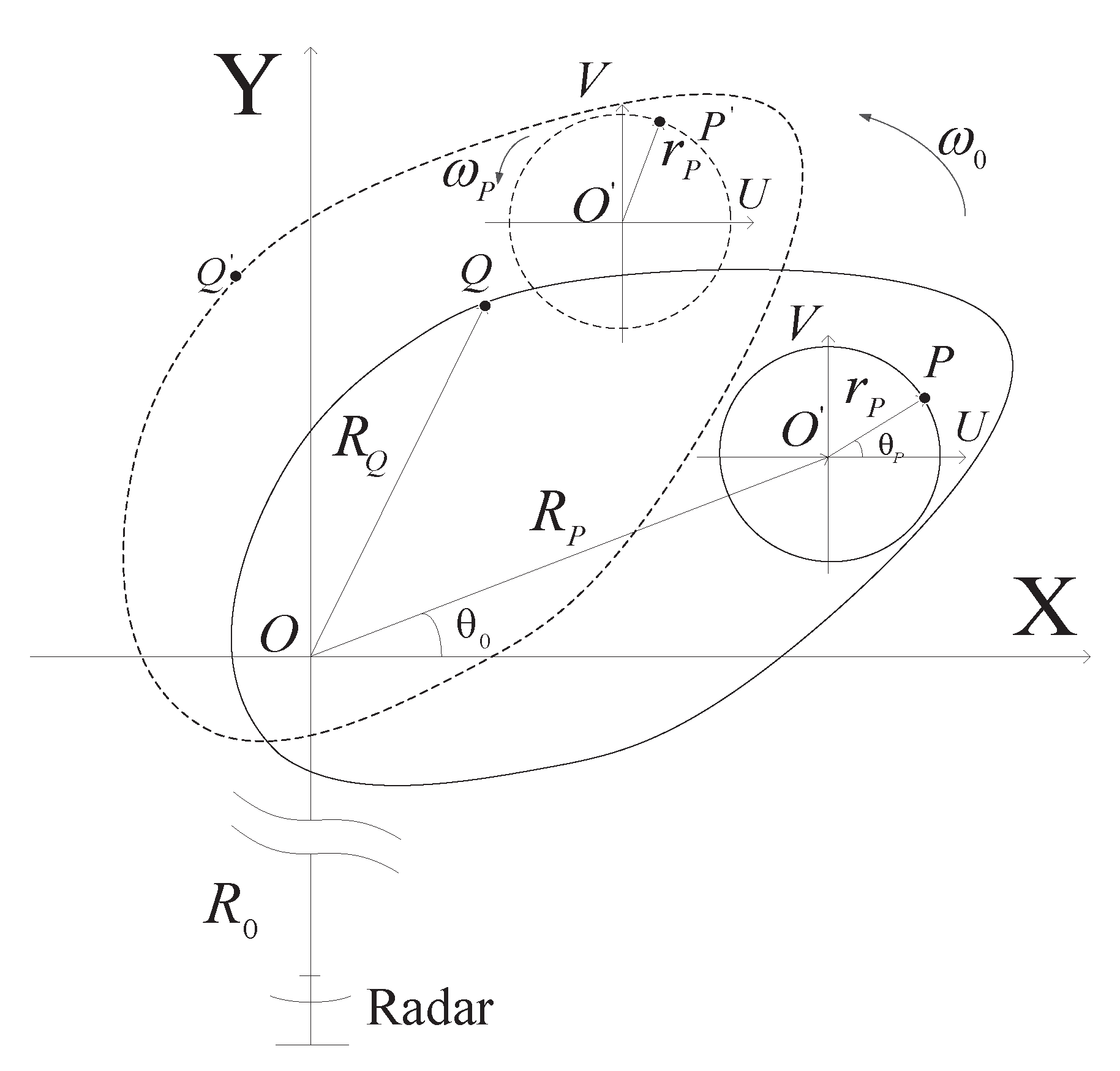
2.1. Signal Model
2.2. Preliminary
2.3. Proposed Optimization Problem
3. Proposed Algorithms
3.1. Algorithm 1
- 1.
- solution for (13)To solve the optimization problem (13), the ADMM method is employed, and the main procedures are derived in the following. For the sake of simplicity, the superscripts and are omitted.To apply the ADMM method, introducing an auxiliary variable and the Lagrange multiplier is required. Then we split the variable as , having the augmented Lagrangian function aswhere is a step size.Problem (16) involves a quadratic cost and leads to a closed-form solution, which can be obtained by setting the first-order derivative of its objective function with respect to as zero. We obtain
- 2.
- solution for (14)For the problem (14), the splitting variable and the Lagrange multiplier are required. Then we have the augmented Lagrangian function as:where is a stepsize.Problem (22) has a closed solution, which is represented asThe problem (23) involves a nuclear norm minimization problem, which can be solved by SVT computation in [30]:where , wherein is the SVD of .The whole algorithm is summarized in Algorithm 1 (Micro-doppler Extraction based on RPCA).
| Algorithm 1 ME-RPCA. |
|
3.2. Algorithm 2
- 3.
- solution for (28).The augmented Lagrangian form of (28), after simple mathematic manipulation, iswhere denotes Lagrange multiplier, is the stepsize.Obviously, all of the problems associated with (30), (31) and (32) are least squares problems, so that their optimal solutions can be obtained by setting the first-order derivative of corresponding objective functions with respect to the target variables. After some manipulations we haveThe whole algorithm is summarized in Algorithm 2 (Micro-doppler Extraction based on Low Complexity RPCA).
| Algorithm 2 ME-LCRPCA. |
|
3.3. Convergence Analysis
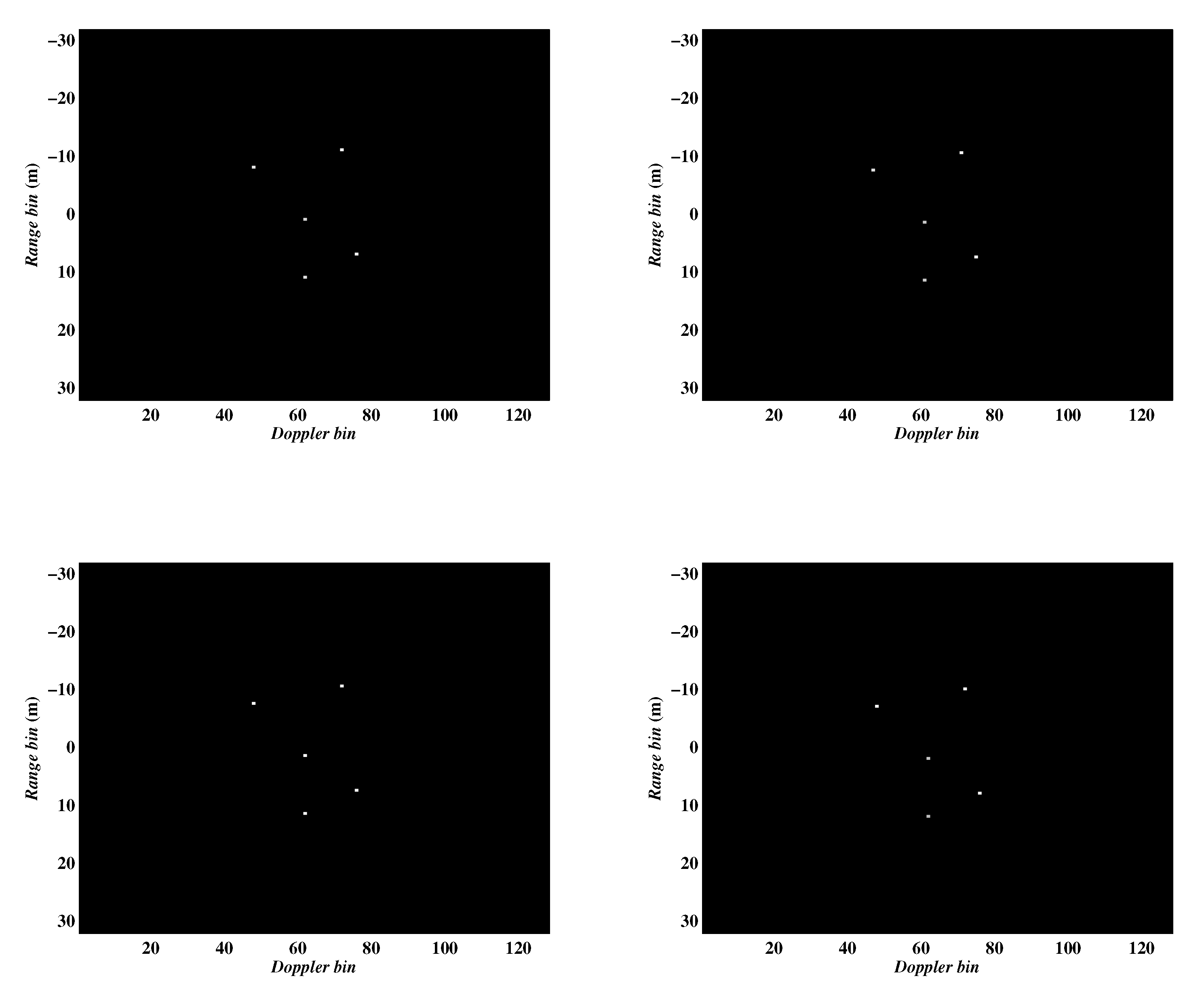
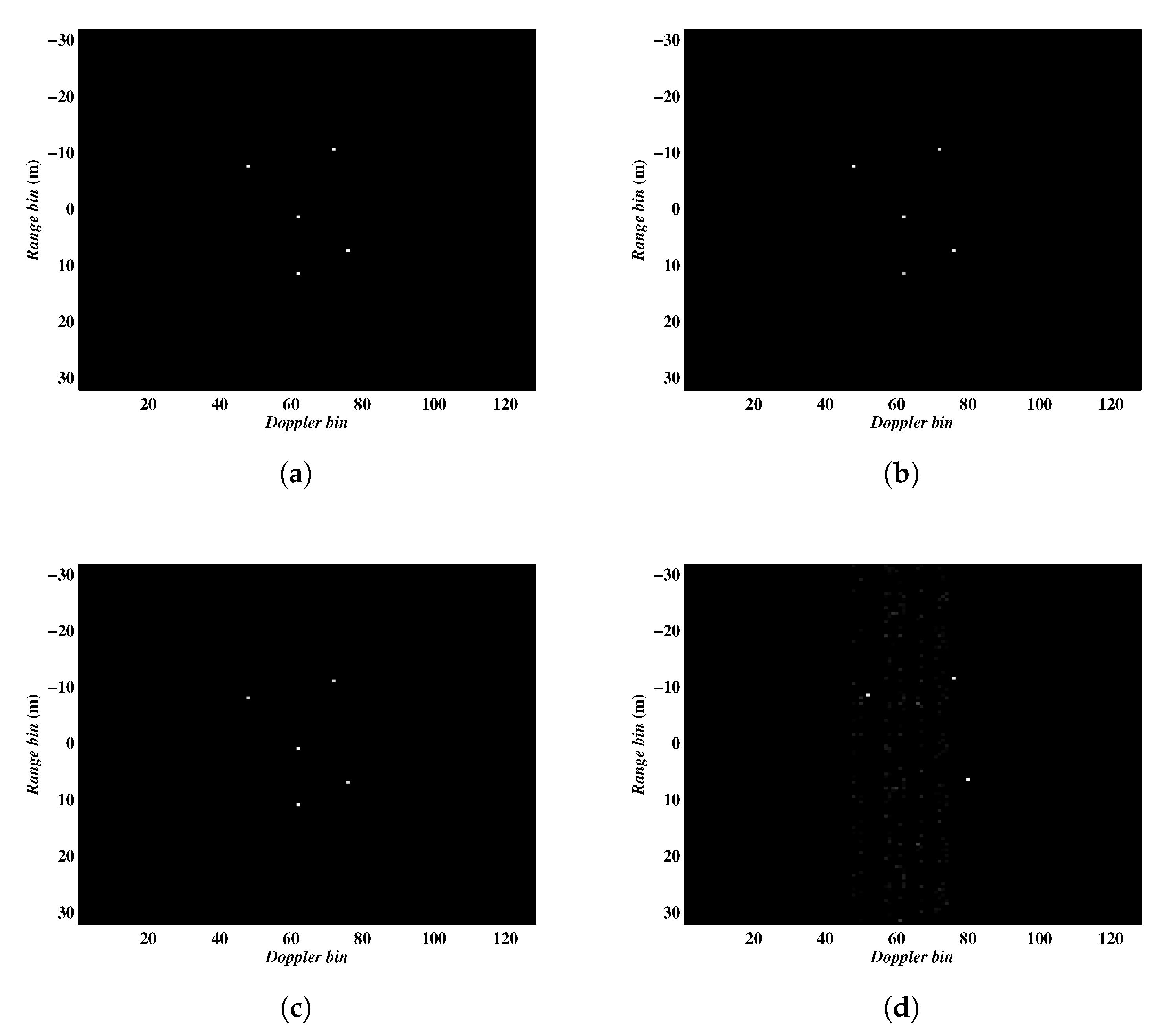
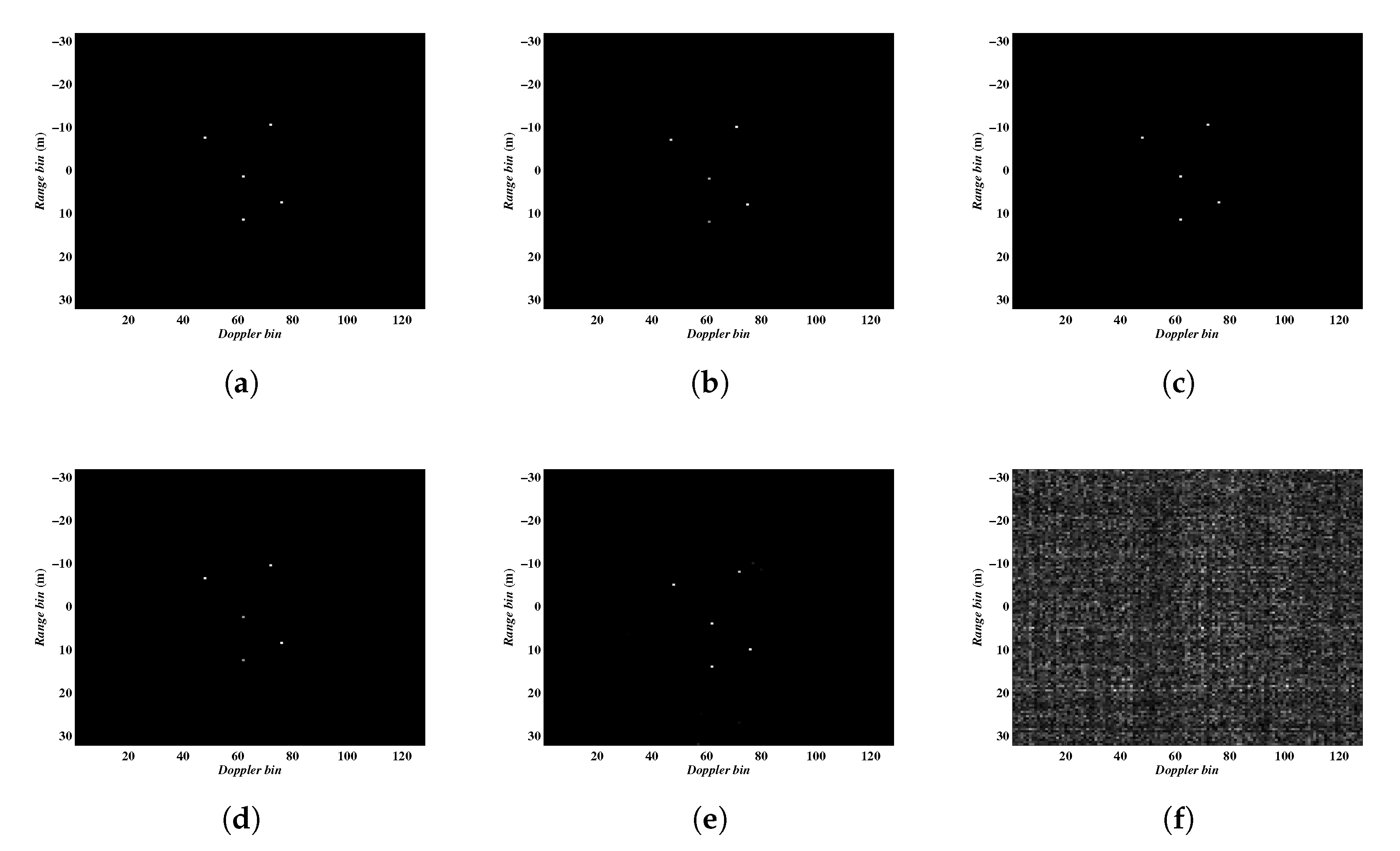
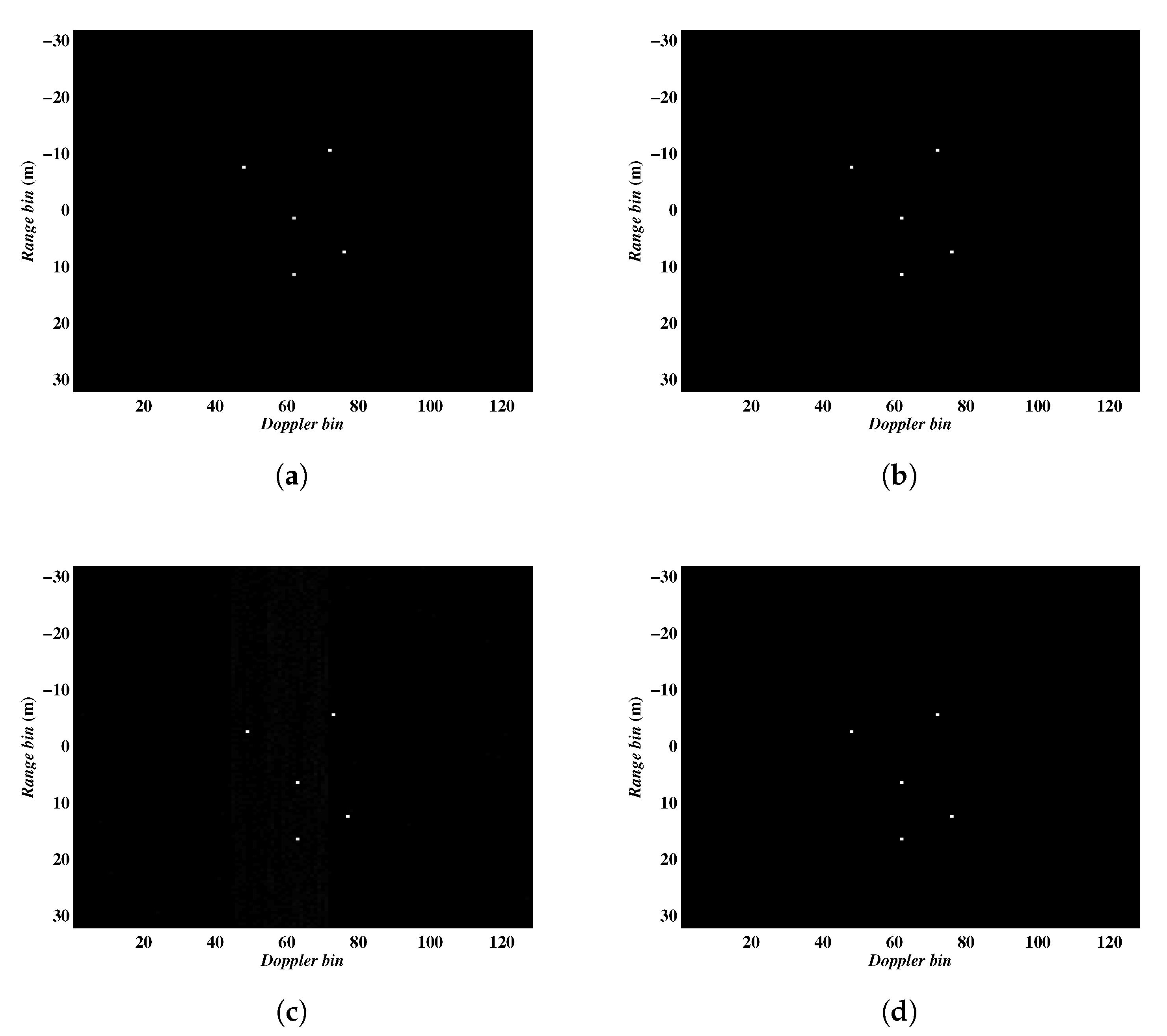
4. Experiments
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Chen, C.C.; Andrews, H. Target-Motion-Induced Radar Imaging. IEEE Trans. Veh. Technol. 1980, 1, 2–14. [Google Scholar] [CrossRef]
- Wu, H.; Grenier, D.; Delisle, G.; Fang, D. Translational motion compensation in ISAR image processing. IEEE Trans. Image Process. 1995, 4, 1561–1571. [Google Scholar]
- Zhang, S.; Liu, Y.; Xiang, L. Minimum entropy based ISAR motion compensation with low SNR. In Proceedings of the 2013 IEEE China Summit and International Conference on Signal and Information Processing, Beijing, China, 6–10 July 2013; pp. 593–596. [Google Scholar]
- Walker, J.L. Range-Doppler Imaging of Rotating Objects. IEEE Trans. Veh. Technol. 1980, 16, 23–52. [Google Scholar] [CrossRef]
- Jiao, Y.; Yu, J.; Che, R. Application of RELAX Algorithm to ISAR Superresolution Imaging. In Proceedings of the 2006 CIE International Conference on Radar, Shanghai, China, 16–19 October 2006. [Google Scholar]
- Palsetia, M.R.; Li, J. Using APES for interferometric SAR imaging. IEEE Trans. Veh. Technol. 1998, 7, 1340–1353. [Google Scholar] [CrossRef]
- Candès, E.J.; Wakin, M.B. An introduction to compressive sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar]
- Peng, C.; Cao, Z.; Chen, Z.; Wang, X. Off-Grid DOA Estimation Using Sparse Bayesian Learning in MIMO Radar With Unknown Mutual Coupling. IEEE Trans. Signal Process. 2019, 67, 208–220. [Google Scholar]
- Chen, P.; Cao, Z.; Chen, Z.; Yu, C. Sparse off-grid DOA estimation method with unknown mutual coupling effect. Digital Signal Process. 2019, 90, 1–9. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, H.; Qiao, Z.j. Resolution enhancement for ISAR imaging via improved statistical compressive sensing. J. Adv. Signal Process. 2016, 80. [Google Scholar] [CrossRef] [Green Version]
- Gang, X.; Xing, M.; Lei, Z.; Liu, Y.; Li, Y. Bayesian Inverse Synthetic Aperture Radar Imaging. IEEE Geosci. Remote Sens. Lett. 2011, 8, 1150–1154. [Google Scholar]
- Chen, V.C.; Li, F.; Ho, S.S.; Wechsler, H. Micro-Doppler effect in radar: Phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Li, J.; Ling, H. Application of adaptive chirplet representation for ISAR feature extraction from targets with rotating parts. IET Radar Sonar Navig. 2003, 150, 284–291. [Google Scholar] [CrossRef]
- Liu, H.; Jiu, B.; Liu, H.; Bao, Z. A Novel ISAR Imaging Algorithm for Micromotion Targets Based on Multiple Sparse Bayesian Learning. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1772–1776. [Google Scholar]
- Sun, L.; Lu, X.; Chen, W. Joint Sparsity-Based ISAR Imaging for Micromotion Targets. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1734–1738. [Google Scholar] [CrossRef]
- Zhang, Q.; Yeo, T.S.; Tan, H.S.; Luo, Y. Imaging of a Moving Target With Rotating Parts Based on the Hough Transform. IEEE Trans. Geosci. Remote Sens. 2007, 46, 291–299. [Google Scholar] [CrossRef]
- Li, K.M.; Liang, X.J.; Zhang, Q.; Luo, Y.; Li, H.J. Micro-Doppler signature extraction and ISAR imaging for target with micromotion dynamics. IEEE Geosci. Remote Sens. Lett. 2011, 8, 411–415. [Google Scholar] [CrossRef]
- Stankovic, L.; Orovic, I.; Stankovic, S.; Amin, M. Compressive Sensing Based Separation of Nonstationary and Stationary Signals Overlapping in Time-Frequency. IEEE Trans. Signal Process. 2013, 61, 4562–4572. [Google Scholar] [CrossRef]
- Zhang, R.; Li, G.; Zhang, Y.D. Micro-doppler interference removal via histogram analysis in time-frequency domain. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 755–768. [Google Scholar] [CrossRef]
- Sun, L.; Chen, W. Micro-Doppler Effect Removal in ISAR Imaging by Promoting Joint Sparsity in Time-Frequency Domain. Sensors 2018, 18, 951. [Google Scholar] [CrossRef] [Green Version]
- Cai, C.; Liu, W.; Fu, J.S.; Lu, L. Empirical mode decomposition of micro-Doppler signature. In Proceedings of the Radar Conference, 2005 IEEE International, Arlington, VA, USA, 9–12 May 2005. [Google Scholar]
- Tanaka, T.; Mandic, D. Complex empirical mode decomposition. IEEE Signal Process Lett. 2007, 14, 101–104. [Google Scholar] [CrossRef]
- Flandrin, P.; Rilling, G.; Goncalves, P. Complex empirical mode decomposition as a filter bank. IEEE Signal Process. Lett. 2004, 11, 112–114. [Google Scholar] [CrossRef] [Green Version]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Liu, G.; Lin, Z.; Yan, S.; Sun, J.; Yu, Y.; Ma, Y. Robust recovery of subspace structures by low-rank representation. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 171–184. [Google Scholar] [CrossRef] [Green Version]
- Wright, J.; Ganesh, A.; Rao, S.; Peng, Y.; Ma, Y. Robust Principal Component Analysis: Exact Recovery of Corrupted Low-Rank Matrices via Convex Optimization. In Proceedings of the Advances in Neural Information Processing Systems 22: 23rd Annual Conference on Neural Information Processing Systems 2009, Vancouver, BC, Canada, 7–10 December 2009. [Google Scholar]
- Emwas, A.H.M.; Salek, R.M.; Griffin, J.L.; Merzaban, J. NMR-based metabolomics in human disease diagnosis: Applications, limitations, and recommendations. Metabolomics 2013, 9, 1048–1072. [Google Scholar] [CrossRef]
- de la Barrière, F.; Druart, G.; Guérineau, N.; Taboury, J.; Primot, J.; Deschamps, J. Modulation transfer function measurement of a multichannel optical system. Appl. Opt. 2010, 49, 2879–2890. [Google Scholar]
- Ender, J.H.G. On compressive sensing applied to radar. Signal Process. 2010, 90, 1402–1414. [Google Scholar] [CrossRef]
- Cai, J.F.; Candès, E.J.; Shen, Z. A Singular Value Thresholding Algorithm for Matrix Completion. SIAM J. Optim. 2010, 20, 1956–1982. [Google Scholar] [CrossRef]
- Boyd S, P.N.; E, C. Distributed optimization and statistical learning via the alternating direction method of multipliers. Foundations Trends Mach. Learn. 2010, 3, 1–122. [Google Scholar] [CrossRef]
- Afonso, M.V.; Bioucas-Dias, J.; Figueiredo, M.A.T. Fast Image Recovery Using Variable Splitting and Constrained Optimization. IEEE Trans. Image Process. 2009, 19, 2345–2356. [Google Scholar] [CrossRef] [Green Version]
- Du, X.; Duan, C.; Hu, W. Sparse Representation Based Autofocusing Technique for ISAR Images. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1826–1835. [Google Scholar] [CrossRef]
- Srebro, N. Learning with Matrix Factorizations. Ph.D. Dissertation, Department of Electrical Engineering and Computer Science, Massachusetts Institute of Technology, Cambridge, MA, USA, 2004. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm 1 | Algorithm 2 | ||
|---|---|---|---|
| Continuously | Entropy | 1.61 | 1.61 |
| sampling | CPU time | 7.1 s | 4.6 s |
| Randomly | Entropy | 1.61 | 1.61 |
| sampling | CPU time | 7.3 s | 4.7 s |
| Figure 6a | Figure 6b | Figure 6c | Figure 6d | |
|---|---|---|---|---|
| Entropy | 1.61 | 1.60 | 1.53 | 3.97 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, L.; Chen, P.; Wu, L. A RPCA-Based ISAR Imaging Method for Micromotion Targets. Sensors 2020, 20, 2989. https://doi.org/10.3390/s20102989
Lu L, Chen P, Wu L. A RPCA-Based ISAR Imaging Method for Micromotion Targets. Sensors. 2020; 20(10):2989. https://doi.org/10.3390/s20102989
Chicago/Turabian StyleLu, Liangyou, Peng Chen, and Lenan Wu. 2020. "A RPCA-Based ISAR Imaging Method for Micromotion Targets" Sensors 20, no. 10: 2989. https://doi.org/10.3390/s20102989