Cognitive States Matter: Design Guidelines for Driving Situation Awareness in Smart Vehicles


Abstract
:1. Introduction
2. Methods
2.1. Background
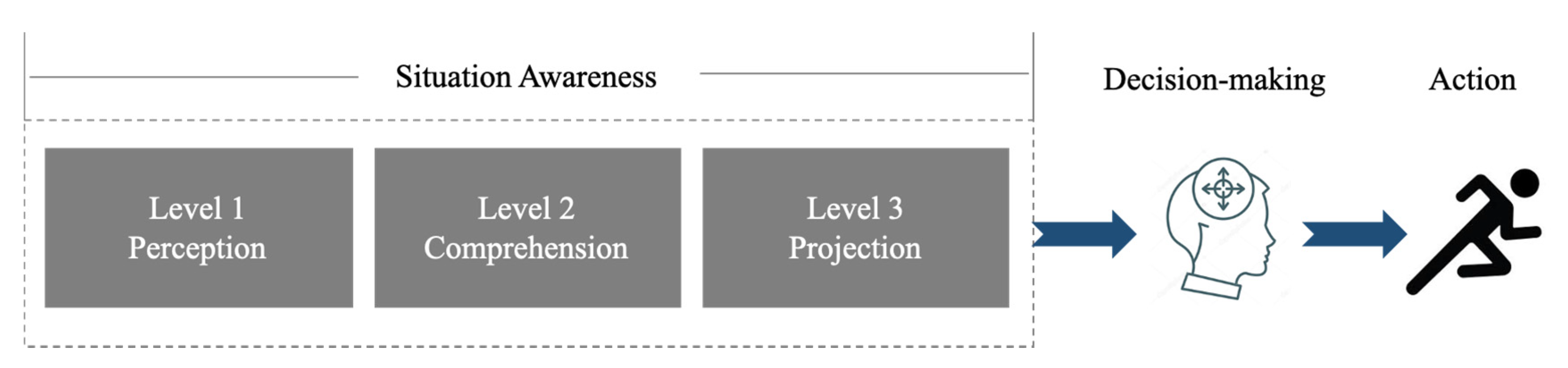
2.1.1. Situation Awareness and Human Errors
2.1.2. Endsley’s SA Design Principles
2.2. Design Guideline Development
2.2.1. Limitations of Ensley’s SA Principles for Vehicular SA Design
2.2.2. Design Guideline Development Methods
2.3. Case Study Design
2.3.1. Metrics
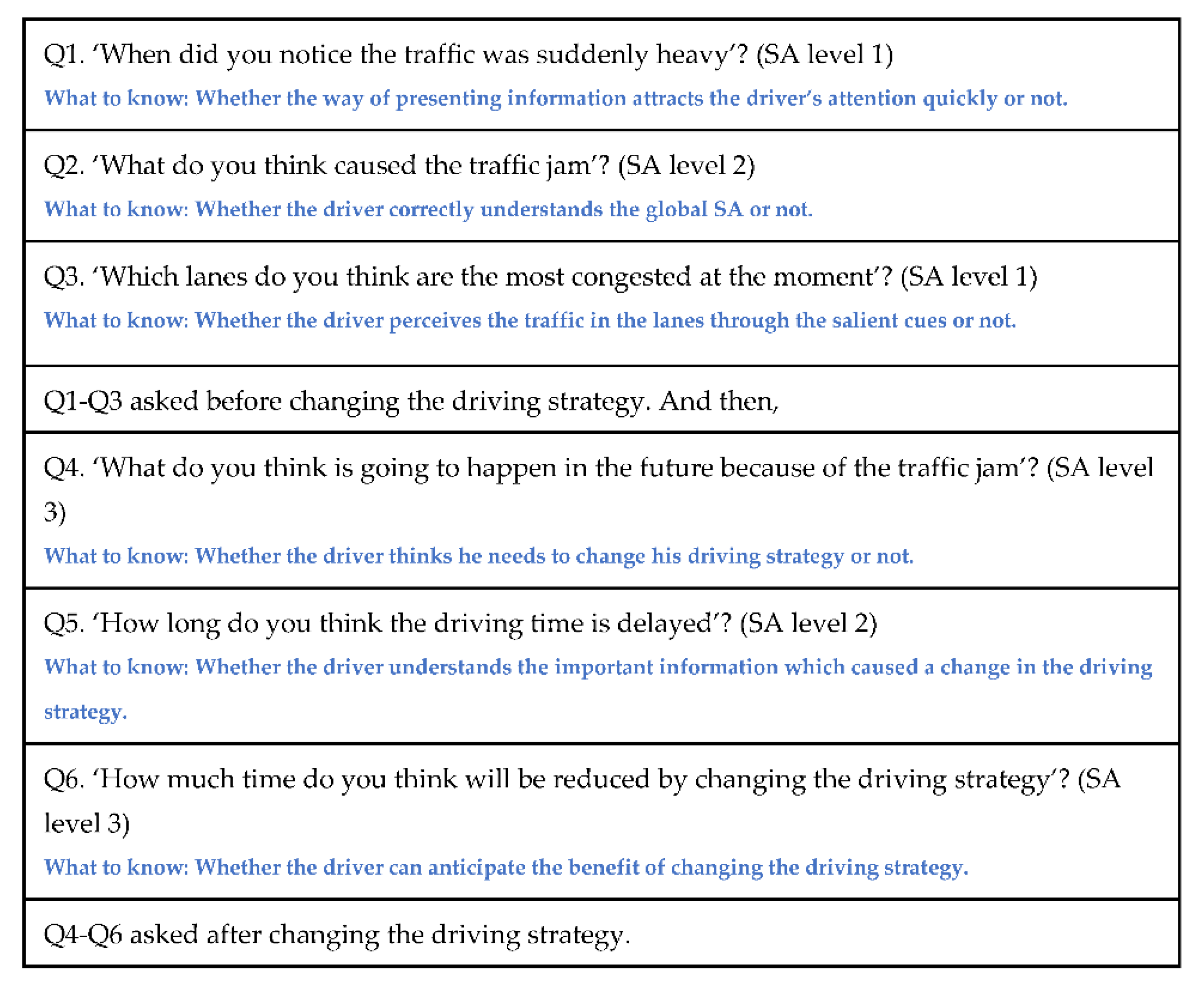
SAGAT
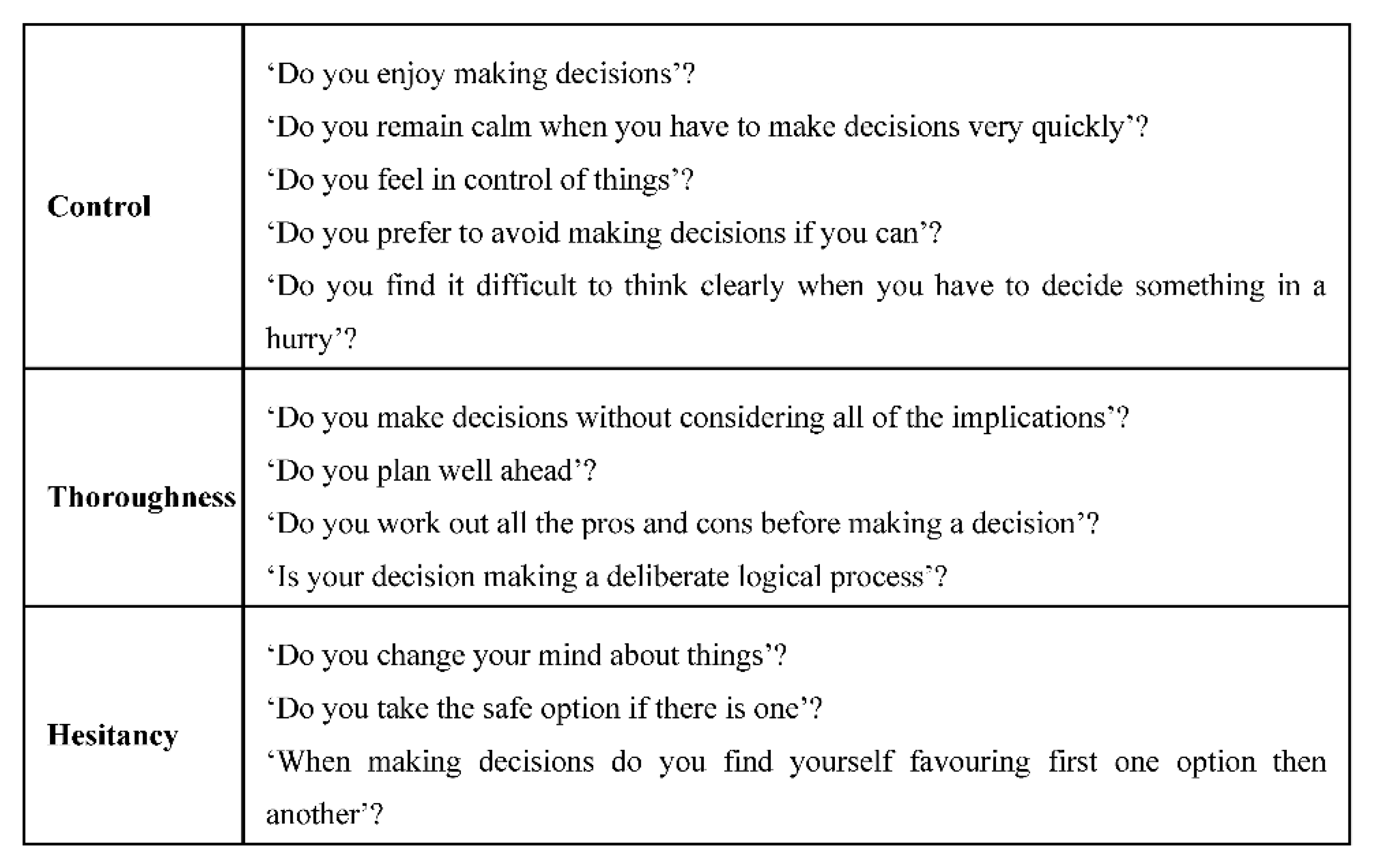
DMQ
2.3.2. Prototype Development Methods
3. Cognitive State-Aware SA Guidelines for the Driving Environment
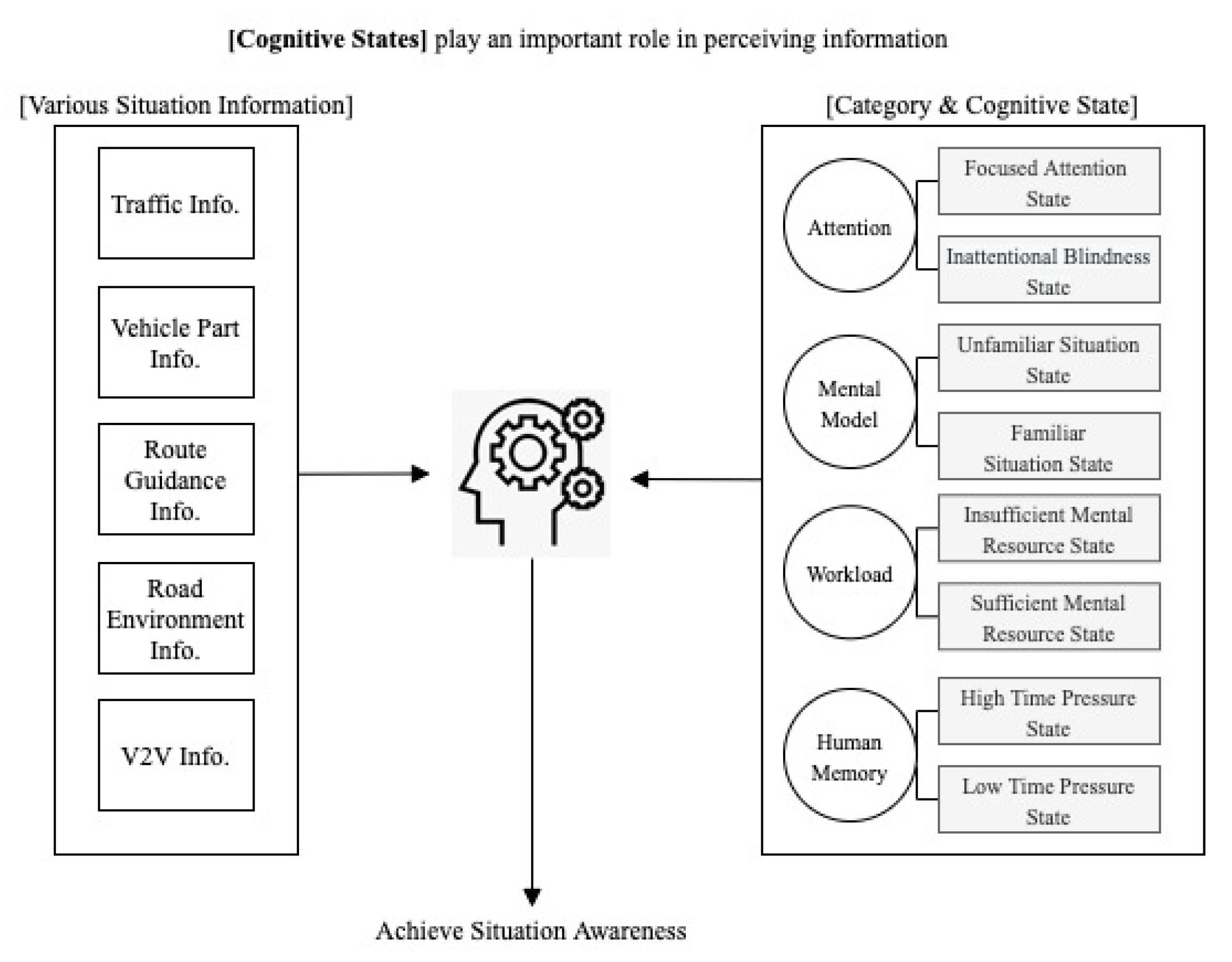
3.1. Major Cognitive States Categories
3.2. Cognitive State-Aware SA Guidelines
- Inattentional Blindness State
- Unfamiliar Situation State
- Familiar Situation State
- Insufficient Mental Resources State
- Sufficient Mental Resources State
- High Time Pressure State
- Low Time Pressure State
4. A Case Study for the Cognitive State-Aware SA Design Guidelines
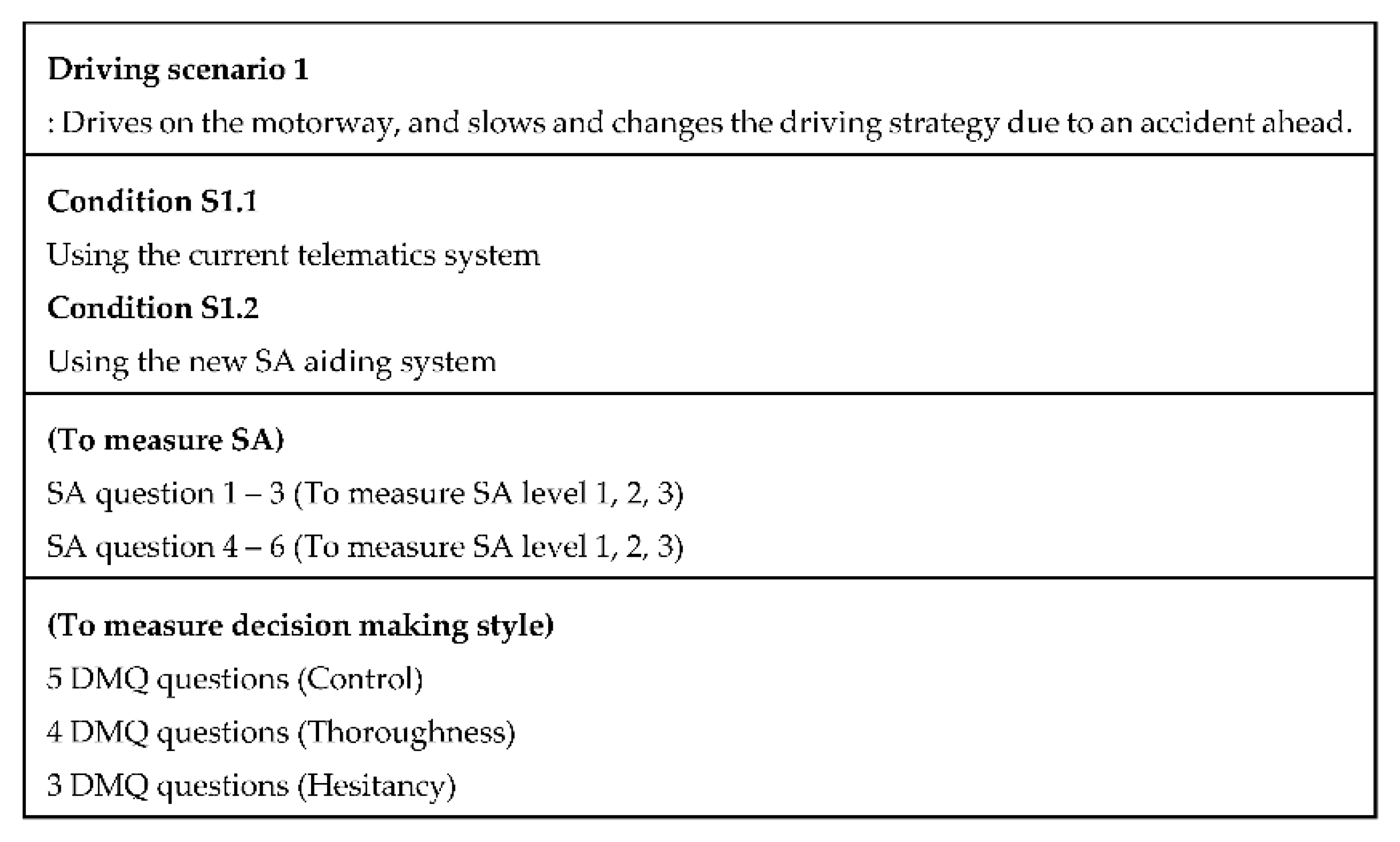
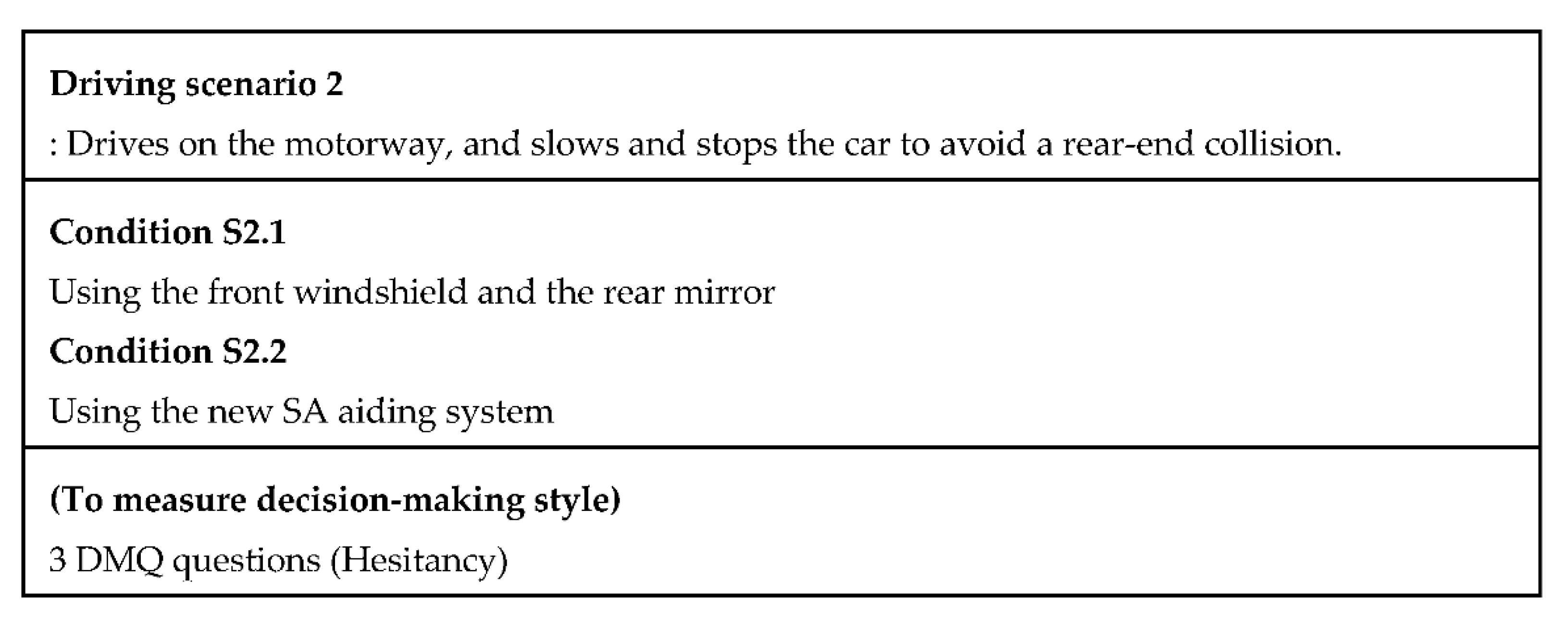
4.1. Case Study Scenarios
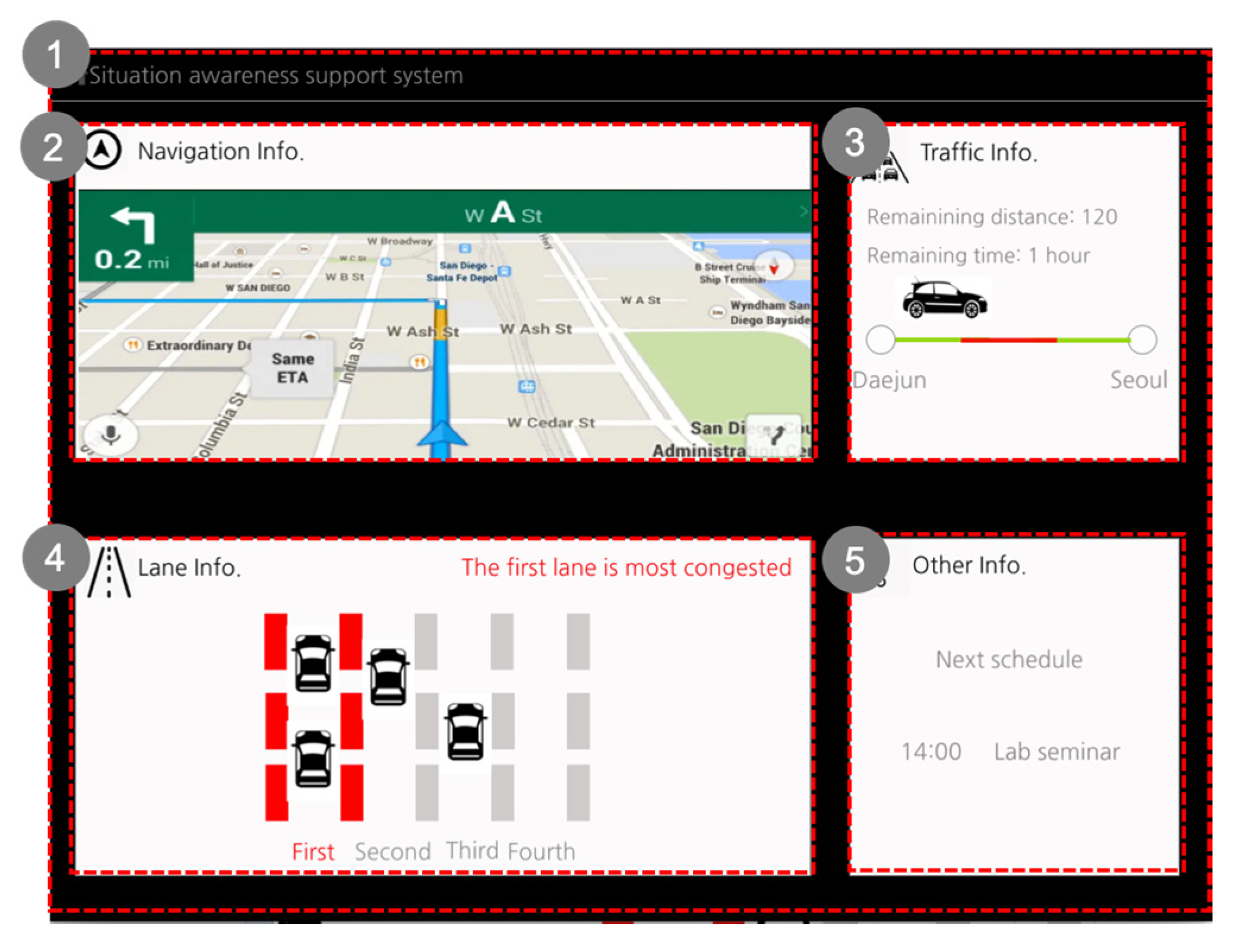
4.2. Descriptions of SA User Interfaces
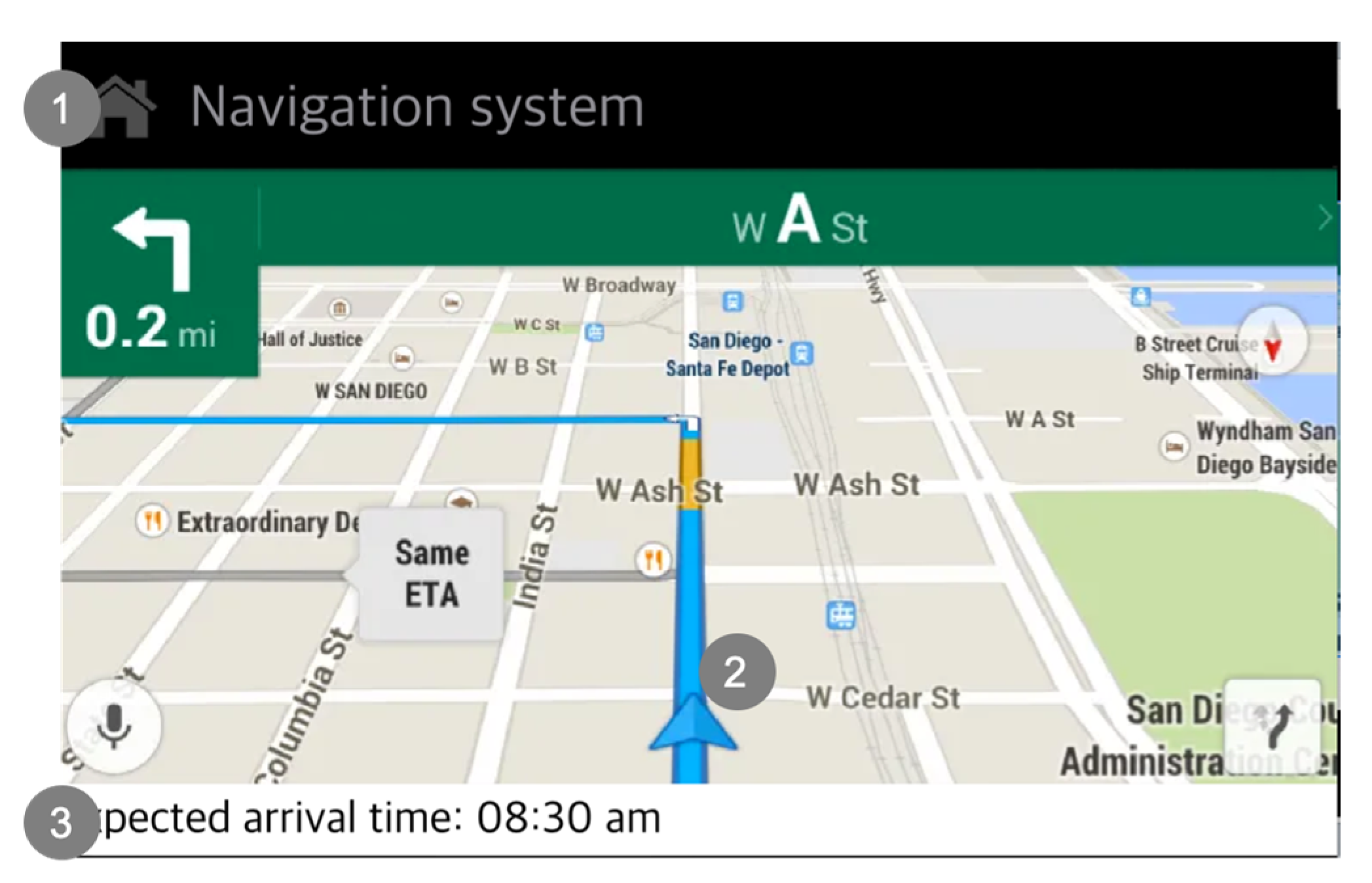
- The Current Telematics System
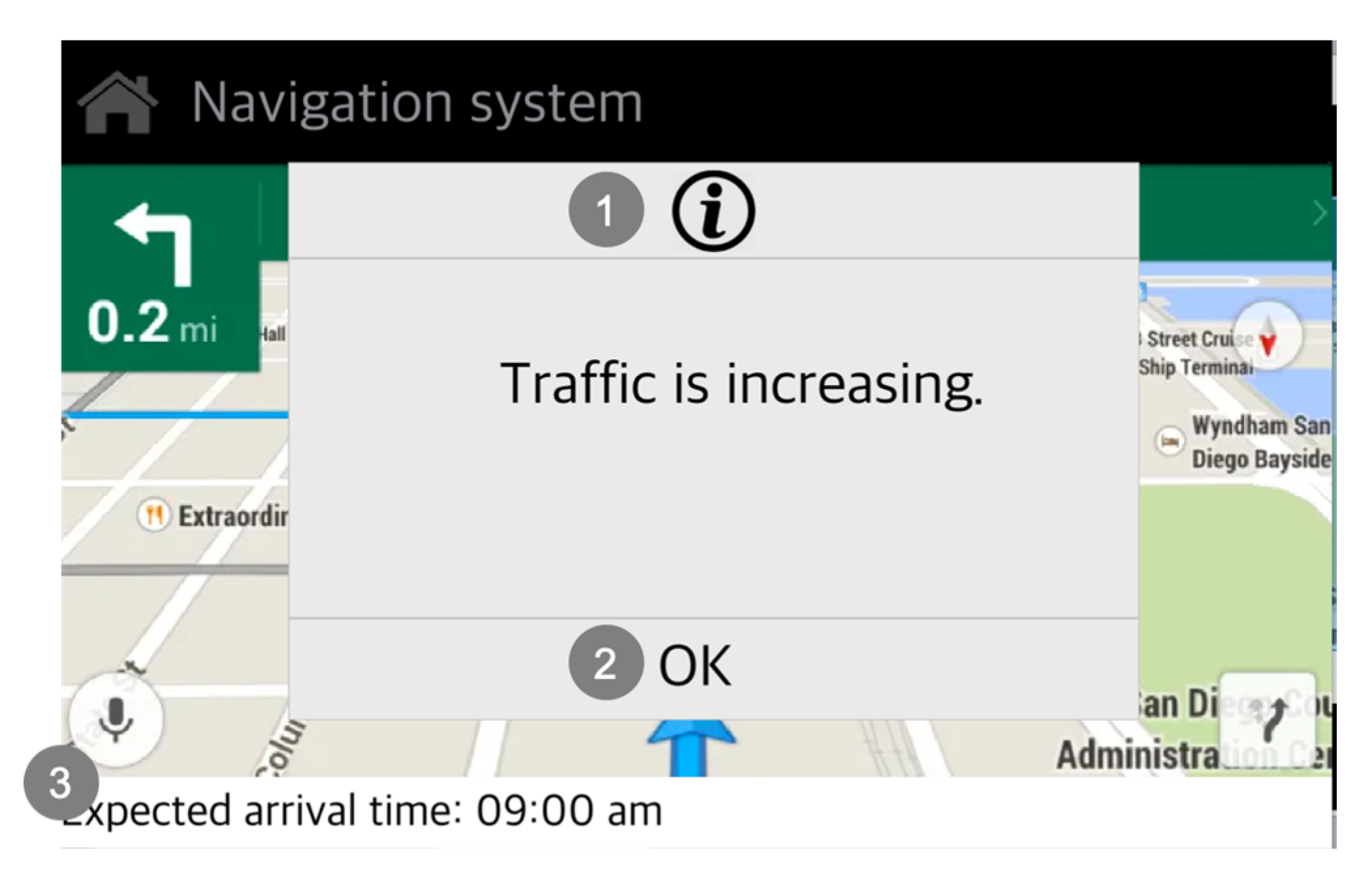
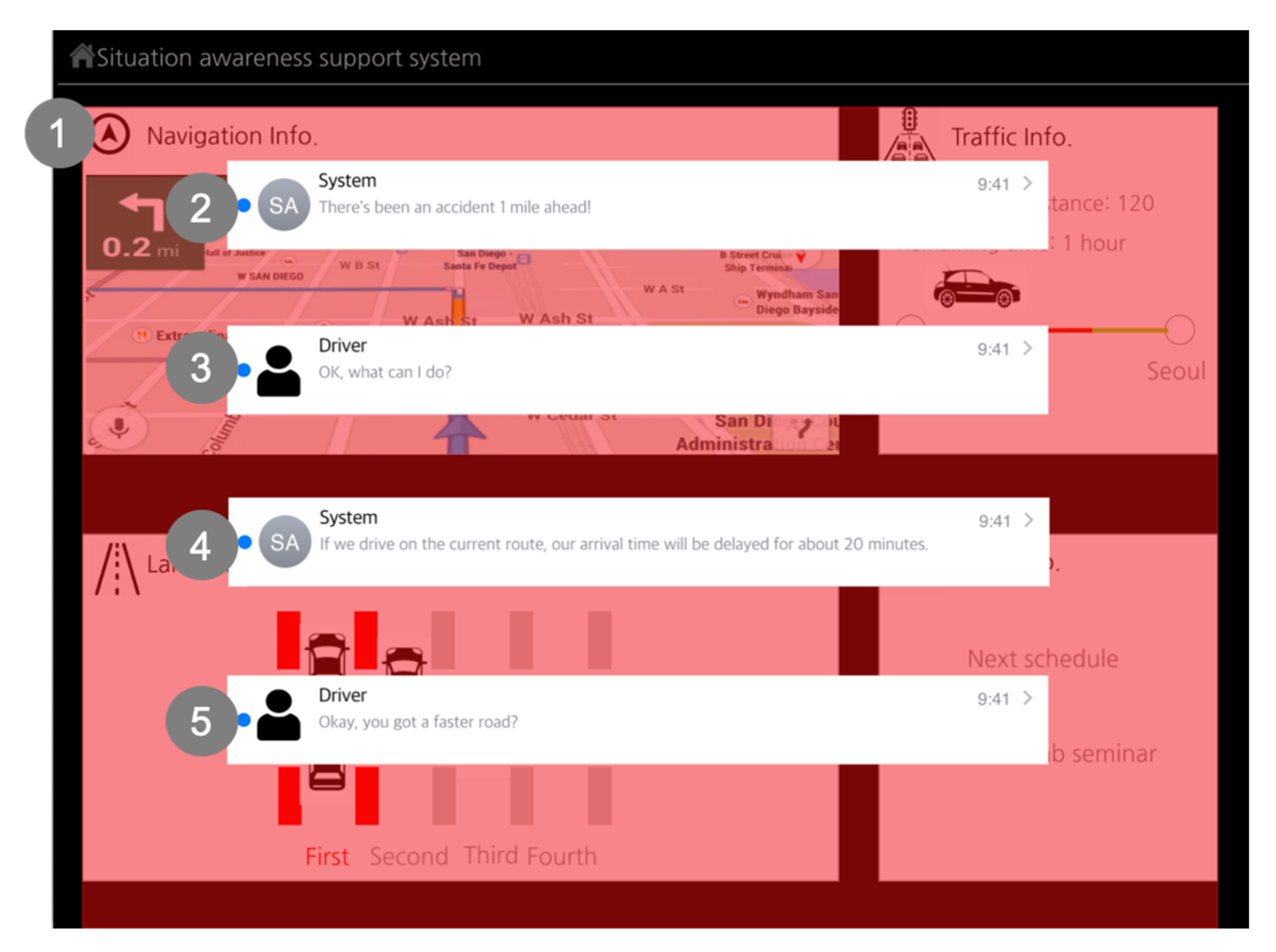
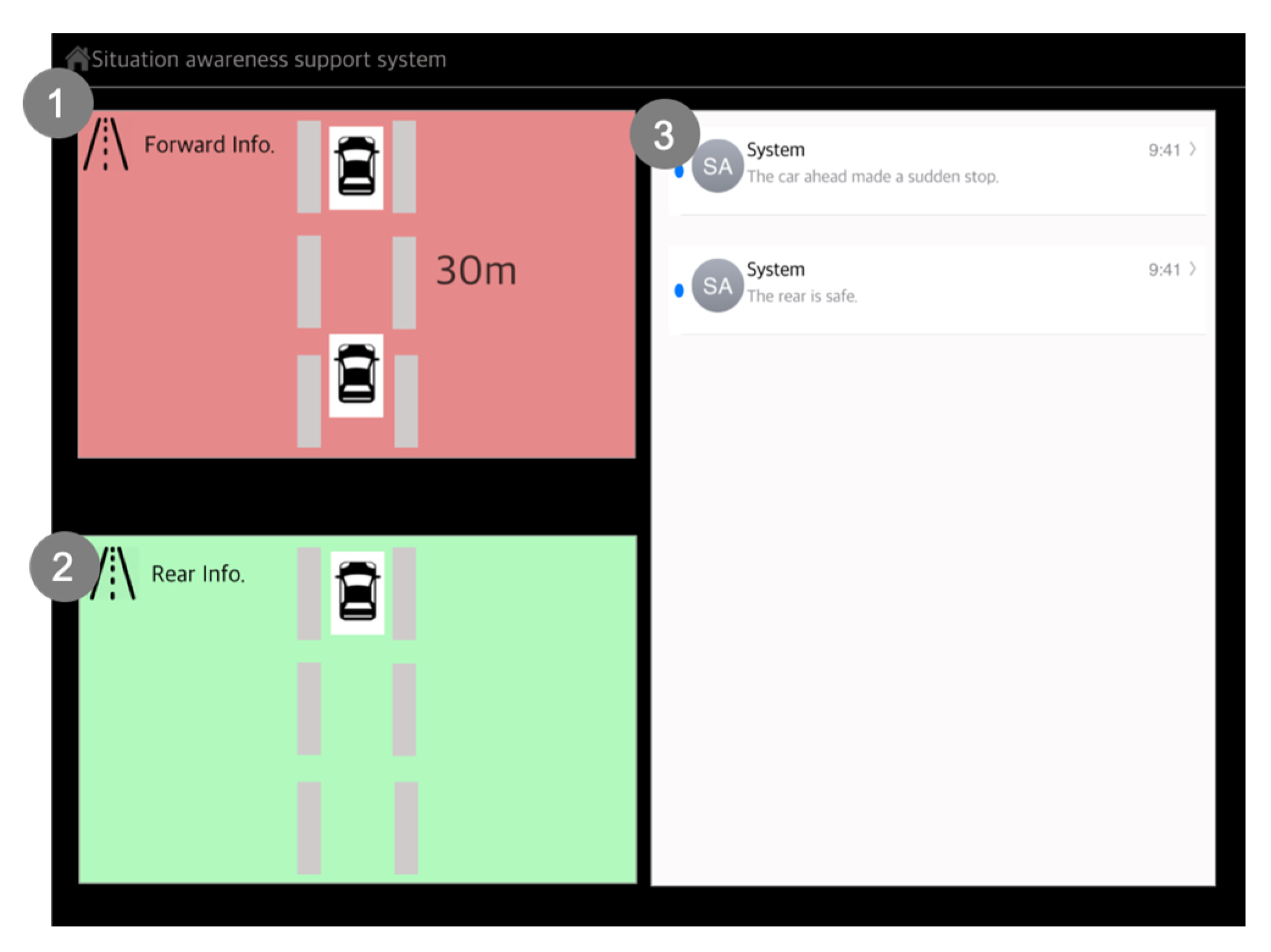
- The New SA Aiding System Prototype
4.3. Participants and Materials
4.4. The Case Study Procedure
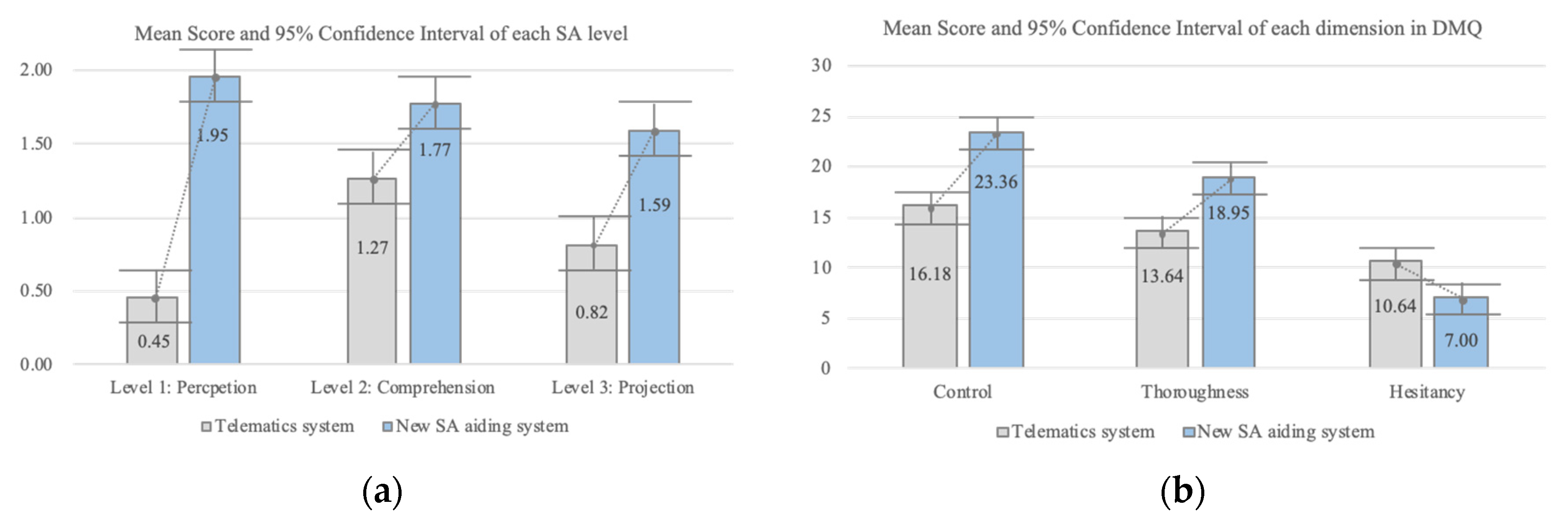
5. Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Endsley, M.R. Design and evaluation for situation awareness enhancement. Proc. Hum. Factors Soc. Annu. Meet. 1988, 32, 97–101. [Google Scholar] [CrossRef]
- Gugerty, L.; Fisher, D.L.; Lee, J.D.; Rizzo, M.; Caird, J. Situation awareness in driving. In Handbook of Driving Simulation for Engineering, Medicine and Psychology; CRC Press: Boca Raton, FL, USA, 2011; pp. 265–272. [Google Scholar]
- Endsley, M.R. Designing for Situation Awareness: An Approach to User-Centered Design; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Gottfredson, L.S. Mainstream science on intelligence: An editorial with 52 signatories, history, and bibliography. Intelligence 1997, 24, 13–23. [Google Scholar] [CrossRef]
- Endsley, M.R. Measurement of situation awareness in dynamic systems. Hum. Factors 1995, 37, 65–84. [Google Scholar] [CrossRef]
- Durso, F.T.; Gronlund, S.D. Situation awareness. In Handbook of Applied Cognition; Wiley: New York, NY, USA, 1999; pp. 283–314. [Google Scholar]
- Goettl, B.P. Situation awareness and executive control processes: Quot homines, tot sententiae. In Proceedings of the Human Factors and Ergonomics Society, 41st Annual Meeting, Albuquerque, NM, USA, 22–26 September 1997. [Google Scholar]
- Lyu, N.; Xie, L.; Wu, C.; Fu, Q.; Deng, C. Driver’s cognitive workload and driving performance under traffic sign information exposure in complex environments: A case study of the highways in China. Int. J. Environ. Res. Public Health 2017, 14, 203. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lintern, G. A comparison of the decision ladder and the recognition-primed decision model. J. Cogn. Eng. Decis. Mak. 2010, 4, 304–327. [Google Scholar] [CrossRef] [Green Version]
- French, D.J.; West, R.J.; Elander, J.; Wilding, J.M. Decision-making style, driving style, and self-reported involvement in road traffic accidents. Ergonomics 1993, 36, 627–644. [Google Scholar] [CrossRef] [PubMed]
- Jones, D.G.; Endsley, M.R. Sources of situation awareness errors in aviation. Aviat. Space Environ. Med. 1996, 67, 507–512. [Google Scholar]
- Endsley, M.R. Situation awareness and human error: Designing to support human performance. In Proceedings of the High Consequence Systems Surety Conference, Albuquerque, NM, USA, 14–17 November 1999. [Google Scholar]
- Schulz, C.M.; Burden, A.; Posner, K.L.; Mincer, S.L.; Steadman, R.; Wagner, K.J.; Domino, K.B. Frequency and Type of Situational Awareness Errors Contributing to Death and Brain Damage—A Closed Claims Analysis. Anesth. J. Am. Soc. Anesthesiol. 2017, 127, 326–337. [Google Scholar]
- Wickens, C.D.; Hollands, J.G.; Banbury, S.; Parasuraman, R. Engineering Psychology and Human Performance; Psychology Press: East Sussex, UK, 2015. [Google Scholar]
- Endsley, M.R.; Robertson, M.M. Training for situation awareness in individuals and teams. In Situation Awareness Analysis and Measurement; CRC Press: Boca Raton, FL, USA, 2000; pp. 349–366. [Google Scholar]
- Chuderski, A. When are fluid intelligence and working memory isomorphic and when are they not? Intelligence 2013, 41, 244–262. [Google Scholar] [CrossRef]
- Pesavento, L. Evaluating Situation Awareness Oriented Design Principles as a Design Tool; KTH Royal Institute of Technology: Stockholm, Sweden, 2015. [Google Scholar]
- Teegavarapu, S.; Summers, J.D.; Mocko, G.M. Case study method for design research: A justification. In Proceedings of the ASME 2008 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Brooklyn, NY, USA, 3–6 August 2008; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2008; pp. 495–503. [Google Scholar]
- Abercrombie, N.; Hill, S.; Turner, B.S. Dictionary of Sociology; Penguin: Harmondsworth, UK, 1984. [Google Scholar]
- Flinto. Available online: https://www.finto.com (accessed on 3 May 2020).
- AV Simulation. Available online: https://www.avsimulation.com (accessed on 3 May 2020).
- Rouse, W.B.; Morris, N.M. On looking into the black box: Prospects and limits in the search for mental models. Psychol. Bull. 1986, 100, 349. [Google Scholar] [CrossRef]
- Fernandes, A.; Braarud, P.Ø. Exploring measures of workload, situation awareness, and task performance in the main control room. Procedia Manuf. 2015, 3, 1281–1288. [Google Scholar] [CrossRef] [Green Version]
- Tsang, P.S.; Michael, A.V. Mental workload and situation awareness. In Handbook of Human Factors and Ergonomics; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006. [Google Scholar]
- Payne, J.; Bettman, J.R.; Johnson, E.J. The Adaptive Decision Maker; Cambridge University Press: Cambridge, UK, 1993. [Google Scholar]
- Leroy, S. Why is it so hard to do my work? The challenge of attention residue when switching between work tasks. Organ. Behav. Hum. Decis. Process. 2009, 109, 168–181. [Google Scholar] [CrossRef]
- Sperber, D.; Wilson, D. Relevance: Communication and Cognition; Harvard University Press: Cambridge, MA, USA, 1986. [Google Scholar]
- Groeger, J.A. Understanding Driving: Applying Cognitive Psychology to a Complex Everyday Task; Routledge: Abington, UK, 2013. [Google Scholar]
- Basil, M.D. Multiple resource theory I: Application to television viewing. Commun. Res. 1994, 21, 177–207. [Google Scholar] [CrossRef]
- Wickens, C.D. Processing resources and attention. In Multiple-Task Performance; CRC Press: Boca Raton, FL, USA, 1991; pp. 3–34. [Google Scholar]
- Flach, J.M.; Vicente, K.J. Complexity, Difficulty, Direct Manipulation and Direct Perception; University of Illinois: Champaign, IL, USA, 1989. [Google Scholar]
- Theeuwes, J. Workload Management. In Designing Safe Road Systems; CRC Press: Boca Raton, FL, USA, 2017; pp. 57–70. [Google Scholar]
- Cnossen, F.; Rothengatter, T.; Meijman, T. Strategic changes in task performance in simulated car driving as an adaptive response to task demands. Transp. Res. Part F Traffic Psychol. Behav. 2000, 3, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Norman, D. The Design of Everyday Things; Revised and Expanded Edition; Basic Books: New York, NY, USA, 2013. [Google Scholar]
- Moon, J.; Anderson, J.R. Timing in multitasking: Memory contamination and time pressure bias. Cogn. Psychol. 2013, 67, 26–54. [Google Scholar] [CrossRef] [PubMed]
- Zur, H.B.; Breznitz, S.J. The effect of time pressure on risky choice behavior. Acta Psychol. 1981, 47, 89–104. [Google Scholar]
- Bader, R.; Siegmund, O.; Woerndl, W. A study on user acceptance of proactive in-vehicle recommender systems. In Proceedings of the 3rd International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Salzburg, Austria, 30 November–2 December 2011; pp. 47–54. [Google Scholar]
- Sugiono, S.; Widhayanuriyawan, D.; Andriani, D.P. Investigating the impact of road condition complexity on driving workload based on subjective measurement using NASA TLX. In MATEC Web of Conference, Proceedings of the 2nd International Conference on Design, Mechanical and Material Engineering, Melbourne, Australia, 14–16 September 2017; Swinburne University of Technology: Melbourne, Australia, 2017; Volume 136, p. 02007. [Google Scholar]
- National Highway Traffic Safety Administration. Visual-Manual NHTSA Driver Distraction Guidelines for In-Vehicle Electronic Devices; National Highway Traffic Safety Administration (NHTSA), Department of Transportation (DOT): Washington, DC, USA, 2012.
- Zhang, Y.; Yuan, W.; Fu, R.; Wang, C. Design of an Energy-Saving Driving Strategy for Electric Buses. IEEE Access 2019, 7, 157693–157706. [Google Scholar] [CrossRef]
- Carretta, T.R.; Perry, D.C.; Ree, M.J. Predicting of Situational Awareness in F-15 Pilots. Int. J. Aviat. Psychol. 1996, 6, 21–41. [Google Scholar] [CrossRef]
- Underwood, G.; Ngai, A.; Underwood, J. Driving experience and situation awareness in hazard detection. Saf. Sci. 2013, 56, 29–35. [Google Scholar] [CrossRef]
- Sahayadhas, A.; Sundaraj, K.; Murugappan, M. Detecting driver drowsiness based on sensors: A review. Sensors 2012, 12, 16937–16953. [Google Scholar] [CrossRef] [Green Version]
- Dirican, A.C.; Göktürk, M. Psychophysiological measures of human cognitive states applied in human computer interaction. Procedia Comput. Sci. 2011, 3, 1361–1367. [Google Scholar] [CrossRef] [Green Version]
- Jin, L.; Niu, Q.; Hou, H.; Xian, H.; Wang, Y.; Shi, D. Driver cognitive distraction detection using driving performance measures. Discrete Dyn. Nat. Soc. 2012, 2012, 432634. [Google Scholar] [CrossRef]
- Oulasvirta, A.; Dayama, N.R.; Shiripour, M.; John, M.; Karrenbauer, A. Combinatorial optimization of graphical user interface designs. Proc. IEEE 2020, 108, 434–464. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Principle | Descriptions |
|---|---|---|
| 1 | Organize information around goals | Information should be organized according to the main objectives of the operator rather than expressed in a technology-oriented manner |
| 2 | Present Level 2 information directly—support comprehension | The degree to which integrated information satisfies level 2 SA will positively influence SA |
| 3 | Provide assistance for Level 3 situation awareness projections | The operator is required to develop a proper mental model to make projections about future states |
| 4 | Support global situation awareness | The operator should have a high-level overview of the situation related to the goals |
| 5 | Support trade-offs between goal-driven and data-driven processing | It deals with the tension between top-down processing and bottom-up processing when designing a system. |
| 6 | Make critical cues for schema activation salient | Activate cognitive functions by offering saliency in user interactions |
| 7 | Take advantage of parallel processing capabilities | The operator can share attention in SA |
| 8 | Use information filtering carefully | Cognitive overload could hinder situation awareness, and filtering can lower the cognitive workload |
| Cognitive State/Category | SA Problems | Guidelines |
|---|---|---|
| Focused attention state (Attention) | The driver’s attention is too narrow to perceive the overall situation around the event (perception error). | 1. The system provides global SA information for effective driving. |
| Inattentional blindness state (Attention) | The driver cannot recognize a cue even if he/she sees it (perception error). | 1. The system uses overt communication to attract the driver’s attention. |
| Unfamiliar situation state (Mental Model) | The driver cannot understand the cue or alert even if he sees it (comprehension error). Understanding, projection, decision-making, and action are relatively slow or inappropriate because the driver lacks an appropriate mental model, and it takes time to retrieve similar experiences or knowledge. | 1. The system presents information proactively to refocus the driver’s attention to the extent that it does not interfere with the driver’s primary task, giving them time to recall the proper knowledge to update the mental model and respond to the situation. 2. The system divides a large amount of information and provides it to the driver little by little to give the driver sufficient time and to help the driver to understand actions to perform. |
| Familiar situation state (Mental Model) | In a familiar and an anticipated situation, the driver performs a skill-based behavior. At this level, he may commit skill-based errors (slips or lapses) (action error) since the driver over-relies on the old version of the information in the model (projection error). | 1. The presented information needs to help the driver to update the mental model with new information to avoid over-rely on the old version of the information in the mental model and to project accurately the future situation. 2. The aiding system should indicate appropriate actions sequentially at the appropriate time to help the driver execute these actions. |
| Insufficient mental resources state (Workload) | The driver is unable to reflect deeply on the situation even though he/she detects a signal or cue because the situation is changing constantly (errors of perception, comprehension, projection, and decision). | 1. The system presents information which processed in information prioritization and summarization as salient for direct perception to the extent that it does not interfere with the driver’s primary task to not increase workload. |
| Sufficient mental resources state (Workload) | The driver is able to consider the situation in detail to understand it correctly. The driver’s workload may be increased depending on the amount of information given at a time, and the timing of presenting the information since the driver is focusing on performing the primary tasks (It leads the driver to enter an insufficient mental resource state). | 1. The system can present more detailed information to enhance Level 2 and Level 3 SA, but information should be configured and provided to avoid increasing the workload too much. 2. The system emphasizes information that needs to be known in the moment the extent that it does not interfere with the driver’s primary task. |
| High time pressure state (Human memory) | The driver can only focus on part of the phenomenon or task and does not care that he/she needs to focus on other elements. There is a risk that mistakes will be committed due to the urgency of the task (errors of perception, comprehension, projection, decision, and action). | 1. If the situation is very urgent, the system presents the information which is processed in information prioritization and summarization by using affordance for direct perception. 2. The information covers a broad range of situations, but focuses on those that are most important. |
| Low time pressure state (Human memory) | Since the driver is focusing on performing the primary tasks, the driver may enter a high time pressure state if the transfer of information is delayed. The driver can readily perceive the situation but may understand it incorrectly (errors of comprehension, projection, decision, and action). | 1. The system provides information proactively to avoid a high time pressure cognitive. 2. Provide more detailed information for correct situation awareness. |
| Correlation | F-Value | p-Value | |
|---|---|---|---|
| One-Way ANOVA: Total SA score | - | 80.42 | <0.01 |
| One-Way ANOVA: SA Level 1 | - | 162.19 | <0.01 |
| One-Way ANOVA: SA Level 2 | - | 10.29 | <0.01 |
| One-Way ANOVA: SA Level 3 | - | 14.84 | <0.01 |
| Correlation: driving experience and the telematics system | 0.34 | 3.12 | 0.09 |
| Correlation: driving experience and the new SA aiding system | 0.26 | 1.18 | 0.29 |
| Correlation | F-Value | p-Value | |
|---|---|---|---|
| One-Way ANOVA: Control | - | 40.64 | <0.01 |
| One-Way ANOVA: Thoroughness | - | 24.11 | <0.01 |
| One-Way ANOVA: Hesitancy | - | 13.79 | <0.01 |
| One-Way ANOVA: Hesitancy (Rear) | - | 15.27 | <0.01 |
| Correlation: driving experience and the telematics system (Control) | −0.25 | 1.32 | 0.26 |
| Correlation: driving experience and the telematics system (Thoroughness) | −0.14 | 0.40 | 0.53 |
| Correlation: driving experience and the telematics system (Hesitancy) | −0.04 | 0.04 | 0.85 |
| Correlation: driving experience and the telematics system (Hesitancy_Rear) | −0.22 | 1.02 | 0.33 |
| Correlation: driving experience and the SA aiding system (Control) | 0.19 | 0.78 | 0.39 |
| Correlation: driving experience and the SA aiding system (Thoroughness) | −0.05 | 0.04 | 0.84 |
| Correlation: driving experience and the SA aiding system (Hesitancy) | −0.18 | 0.68 | 0.42 |
| Correlation: driving experience and the SA aiding system (Hesitancy_Rear) | −0.17 | 0.57 | 0.46 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, D.; Yoon, W.C.; Lee, U. Cognitive States Matter: Design Guidelines for Driving Situation Awareness in Smart Vehicles. Sensors 2020, 20, 2978. https://doi.org/10.3390/s20102978
Park D, Yoon WC, Lee U. Cognitive States Matter: Design Guidelines for Driving Situation Awareness in Smart Vehicles. Sensors. 2020; 20(10):2978. https://doi.org/10.3390/s20102978
Chicago/Turabian StylePark, Daehee, Wan Chul Yoon, and Uichin Lee. 2020. "Cognitive States Matter: Design Guidelines for Driving Situation Awareness in Smart Vehicles" Sensors 20, no. 10: 2978. https://doi.org/10.3390/s20102978