Development of a Multi-Array Pressure Sensor Module for Radial Artery Pulse Wave Measurement


Abstract
:
1. Introduction
2. Materials and Methods
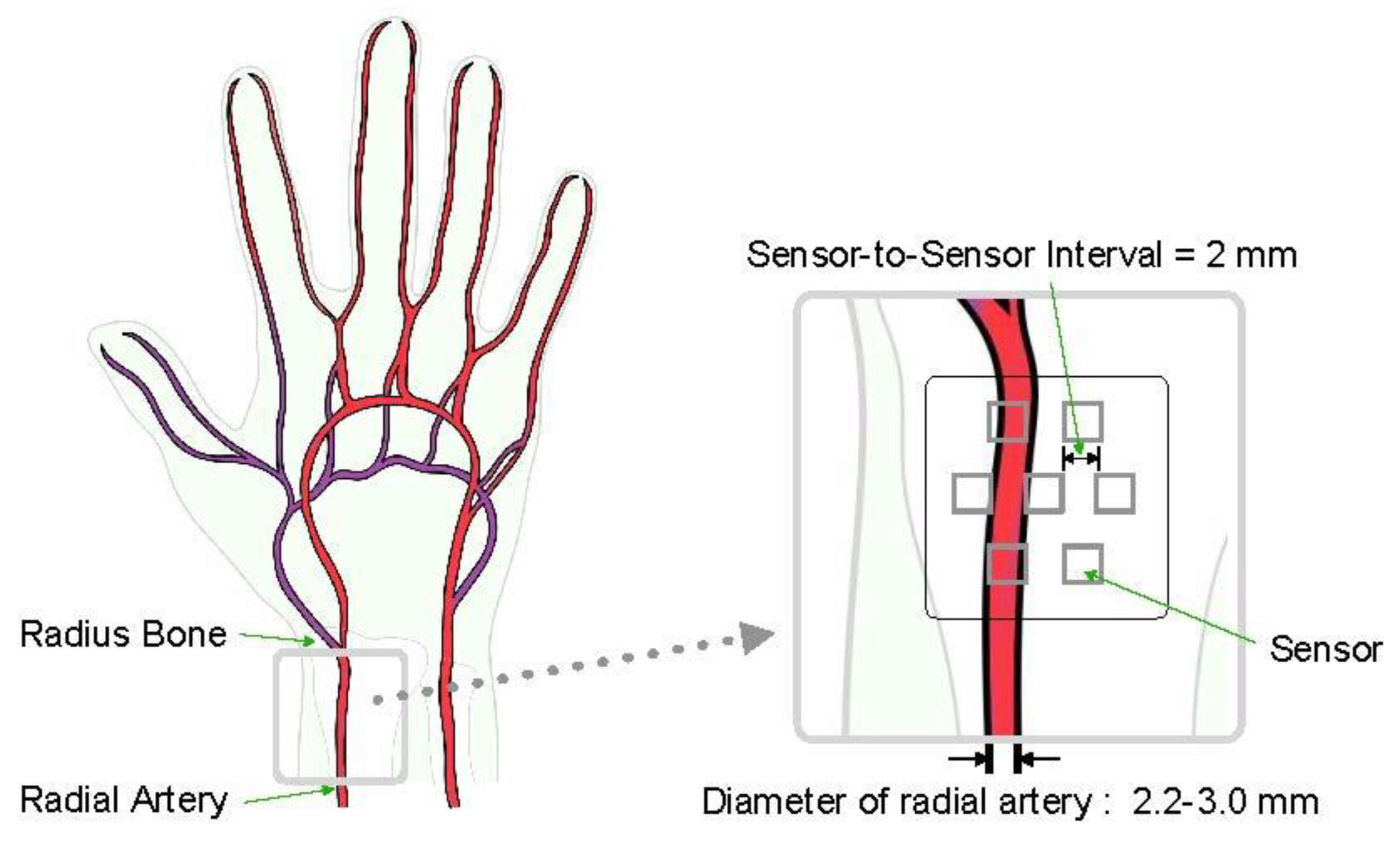
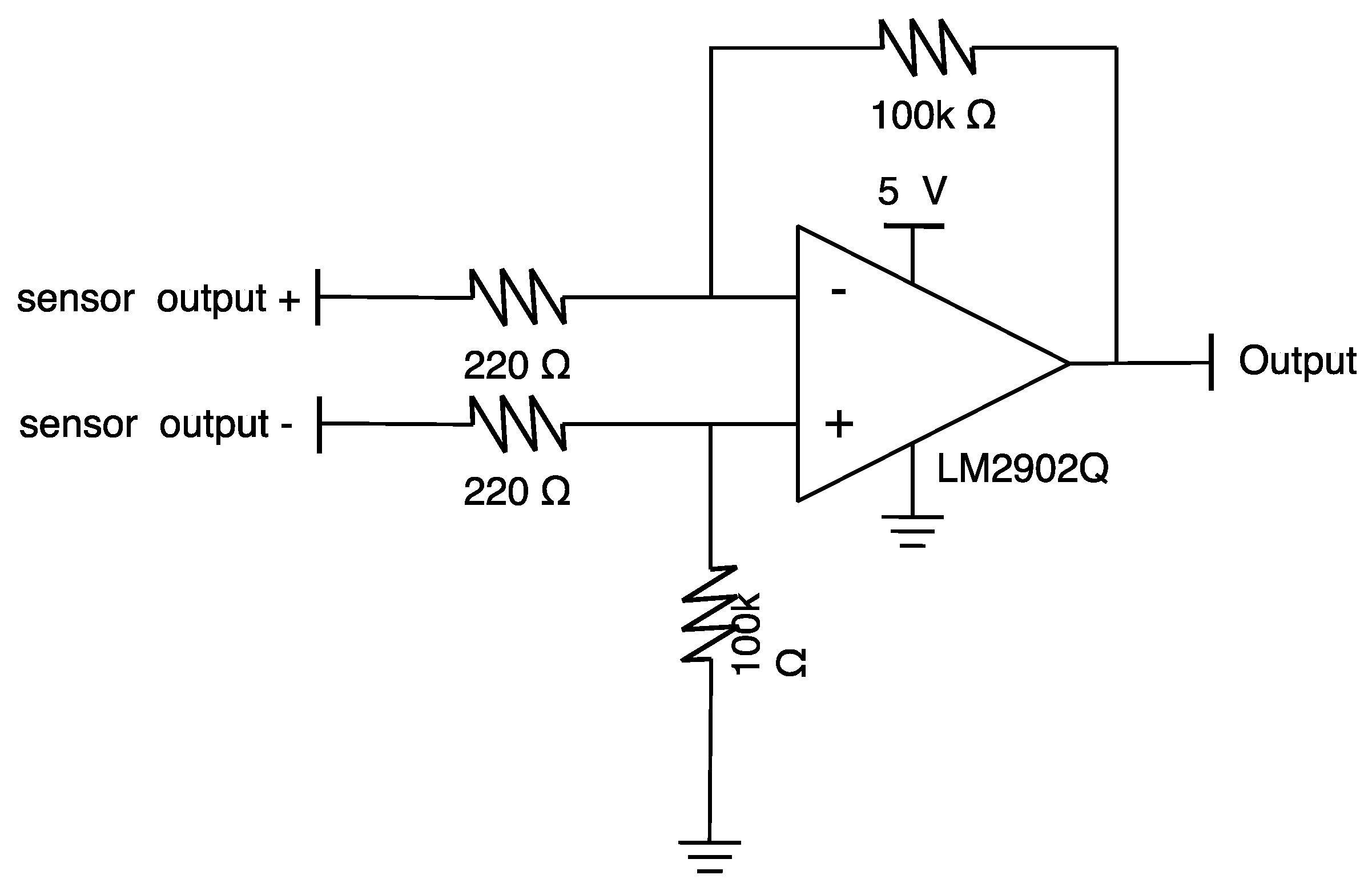
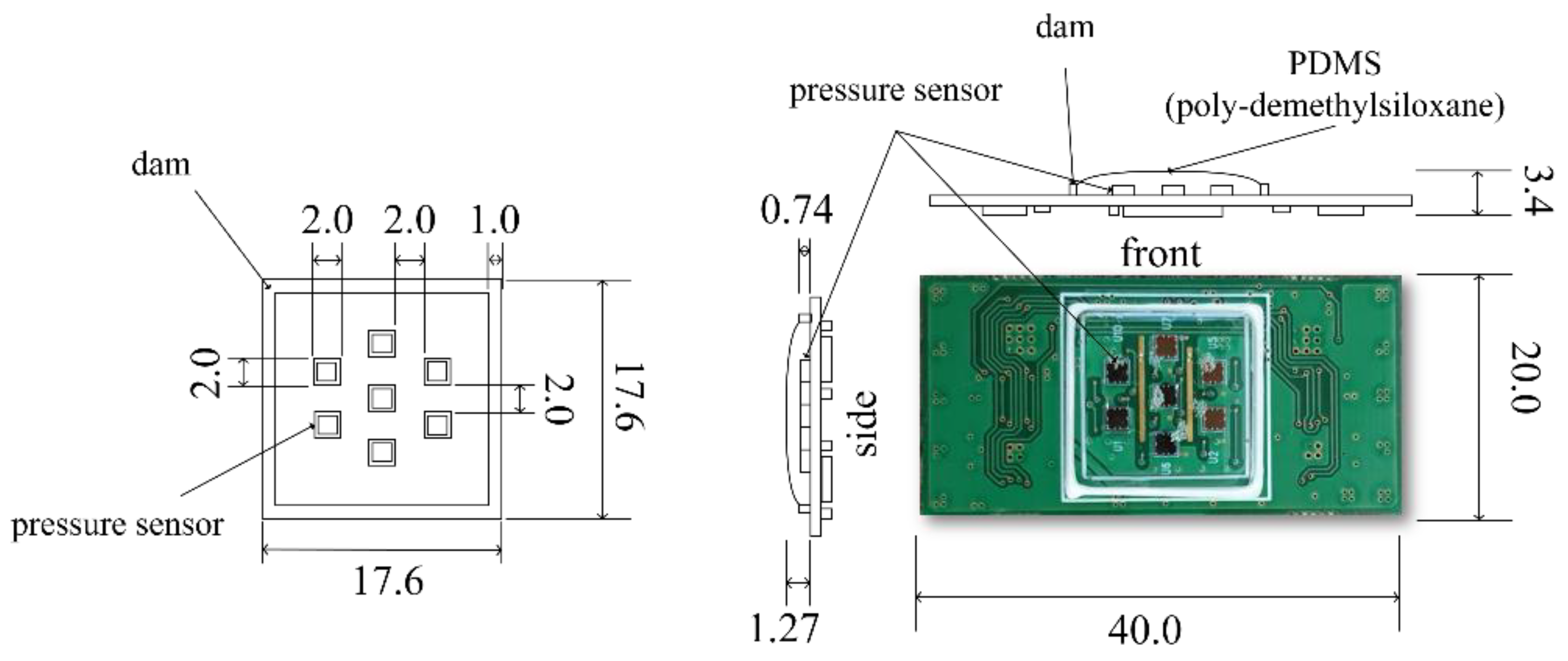
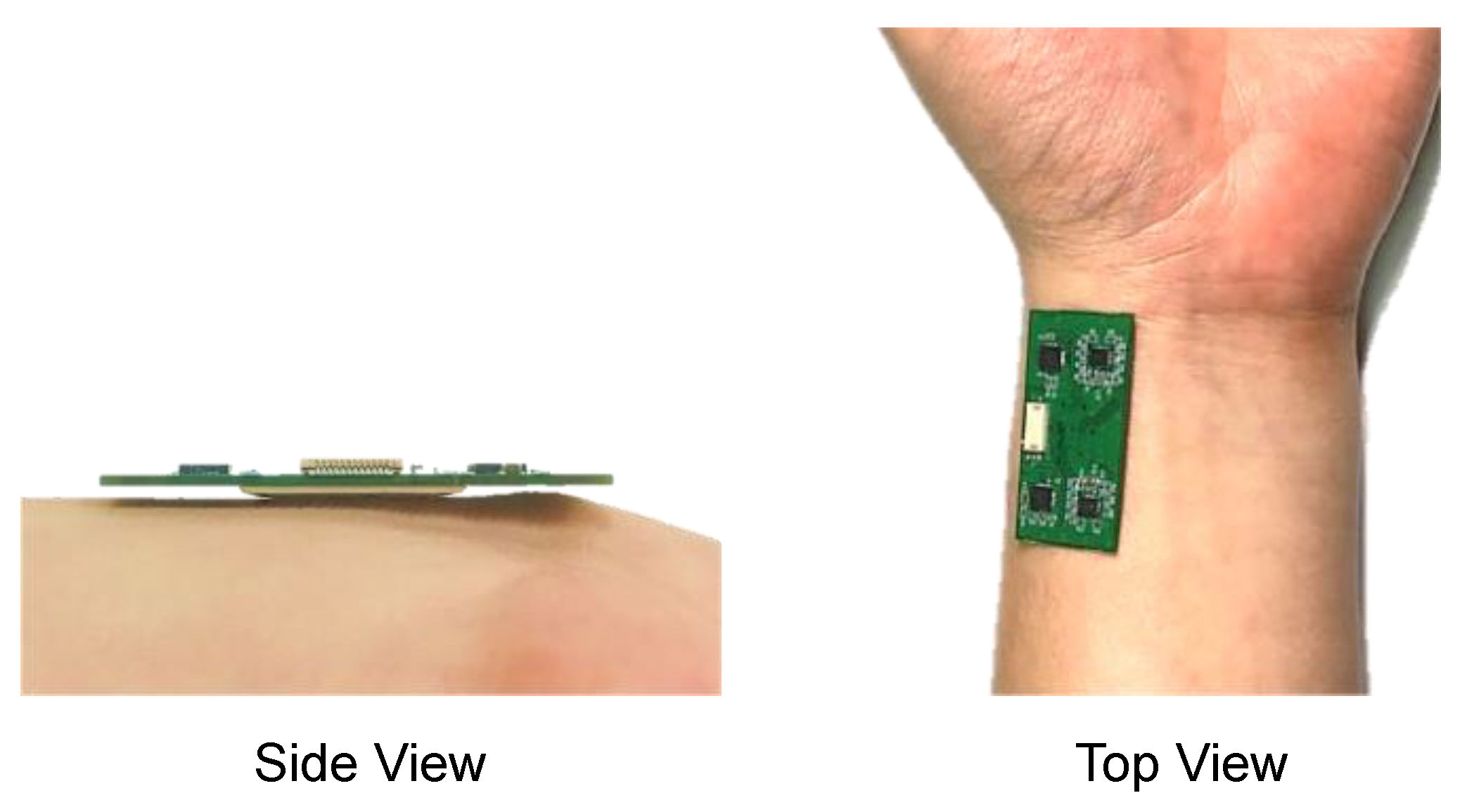
2.1. Development of Multi-Array Pressure Sensor Module
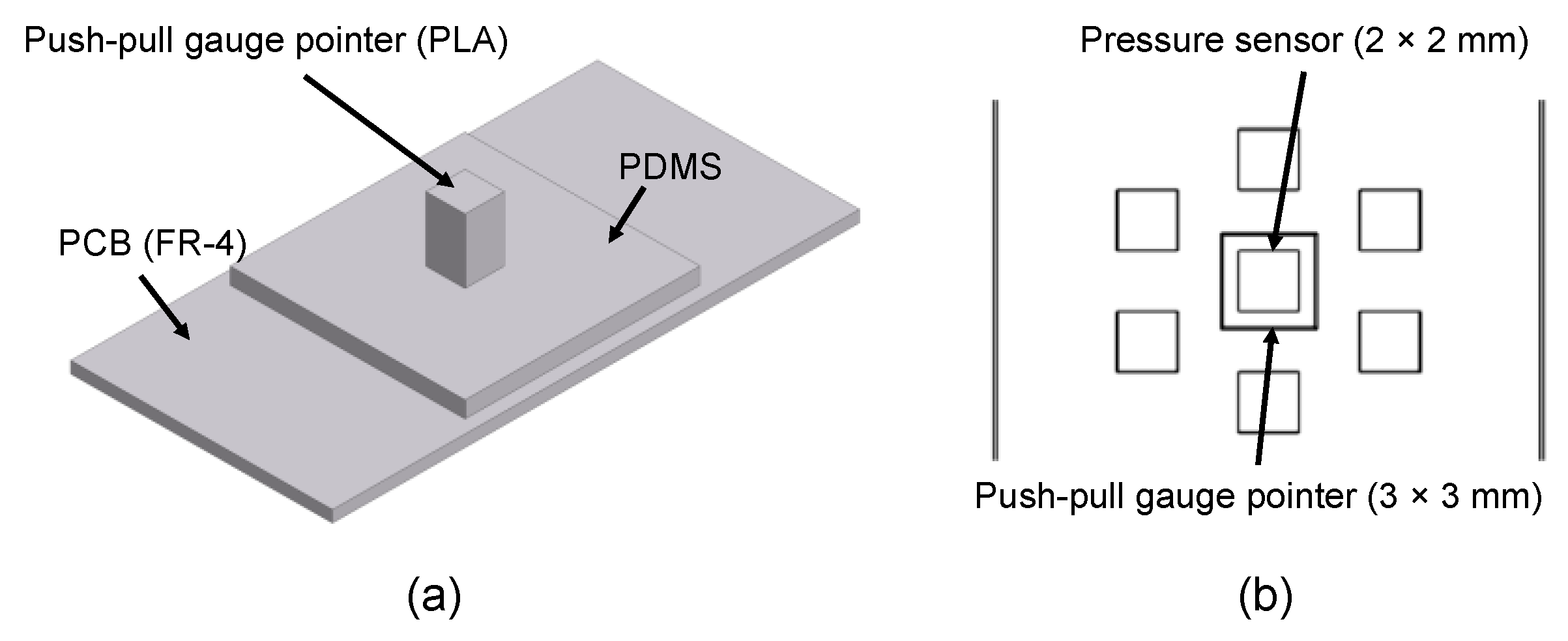
2.2. Finite Element Method Modeling for Sensor Evaluation
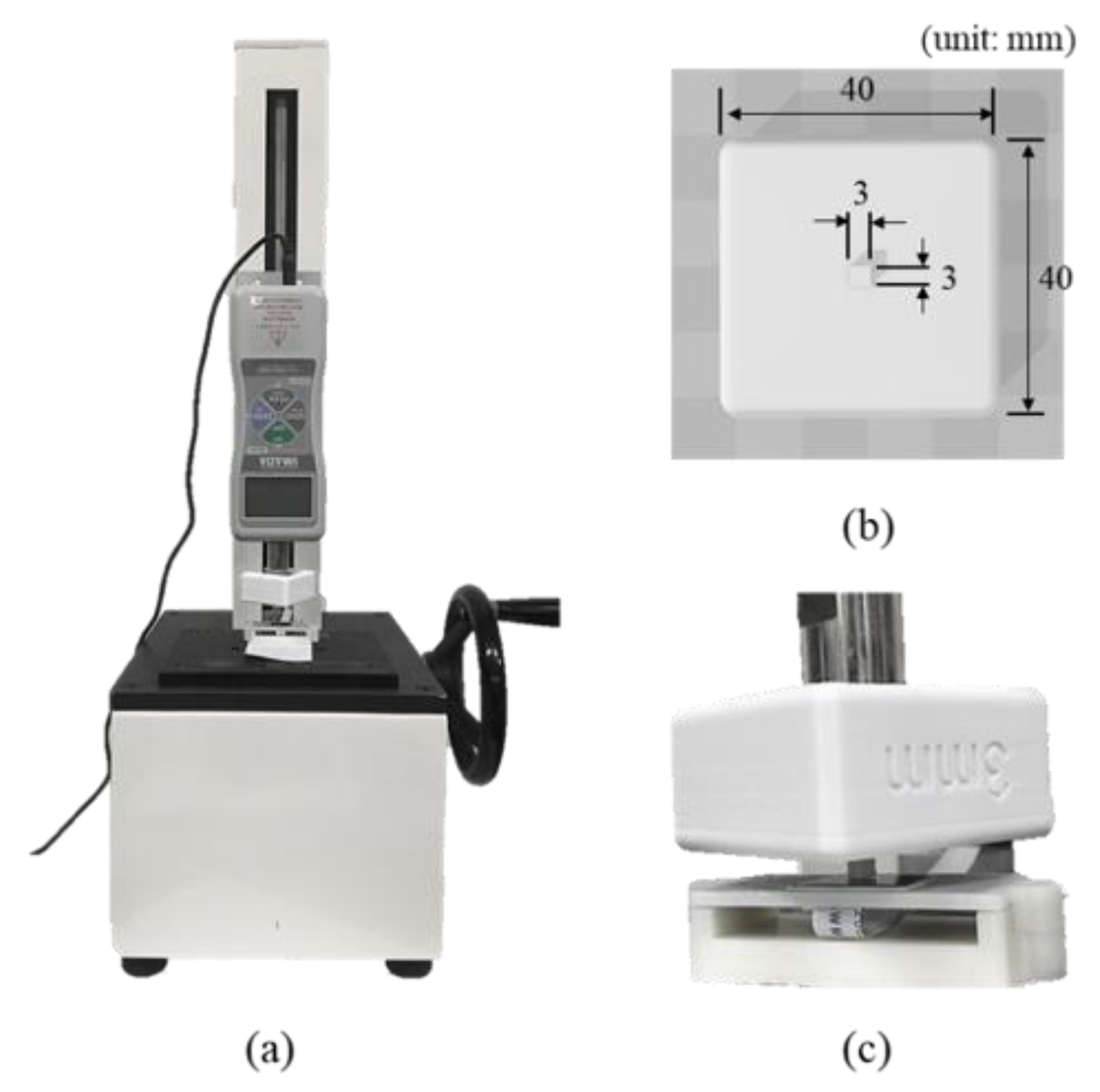
2.3. Pressure Test Using a Pointer Jig
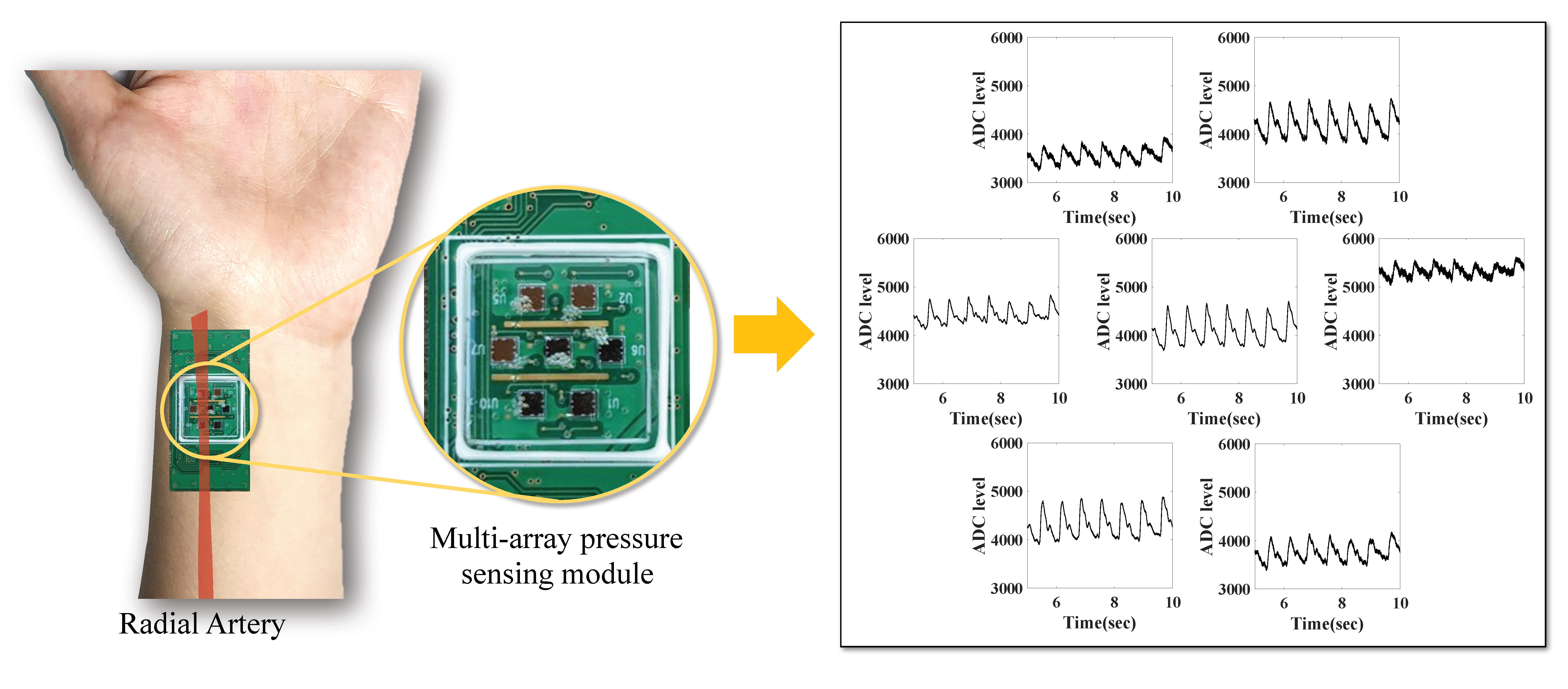
2.4. Pulse Wave Measurement Test
3. Results
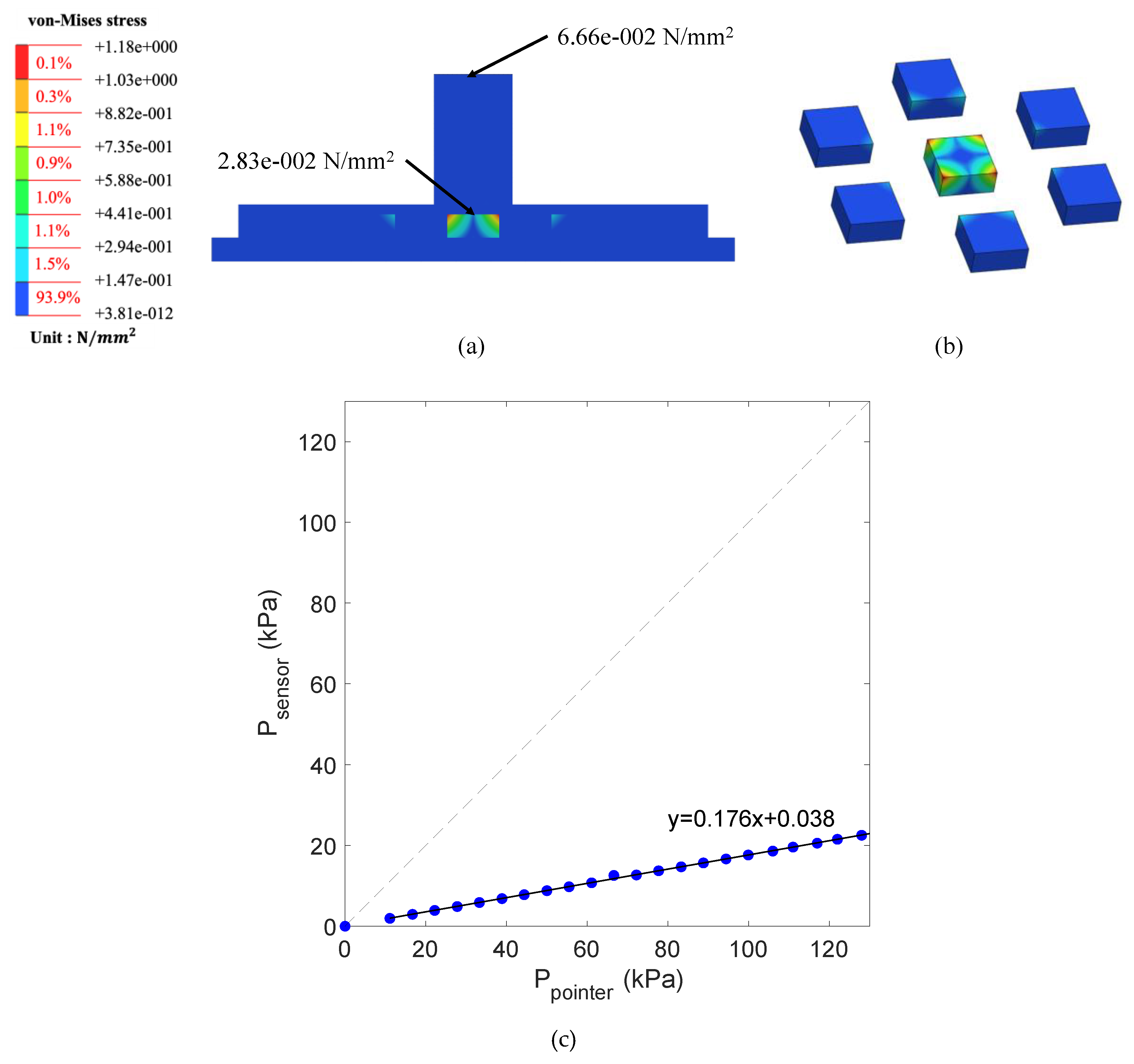
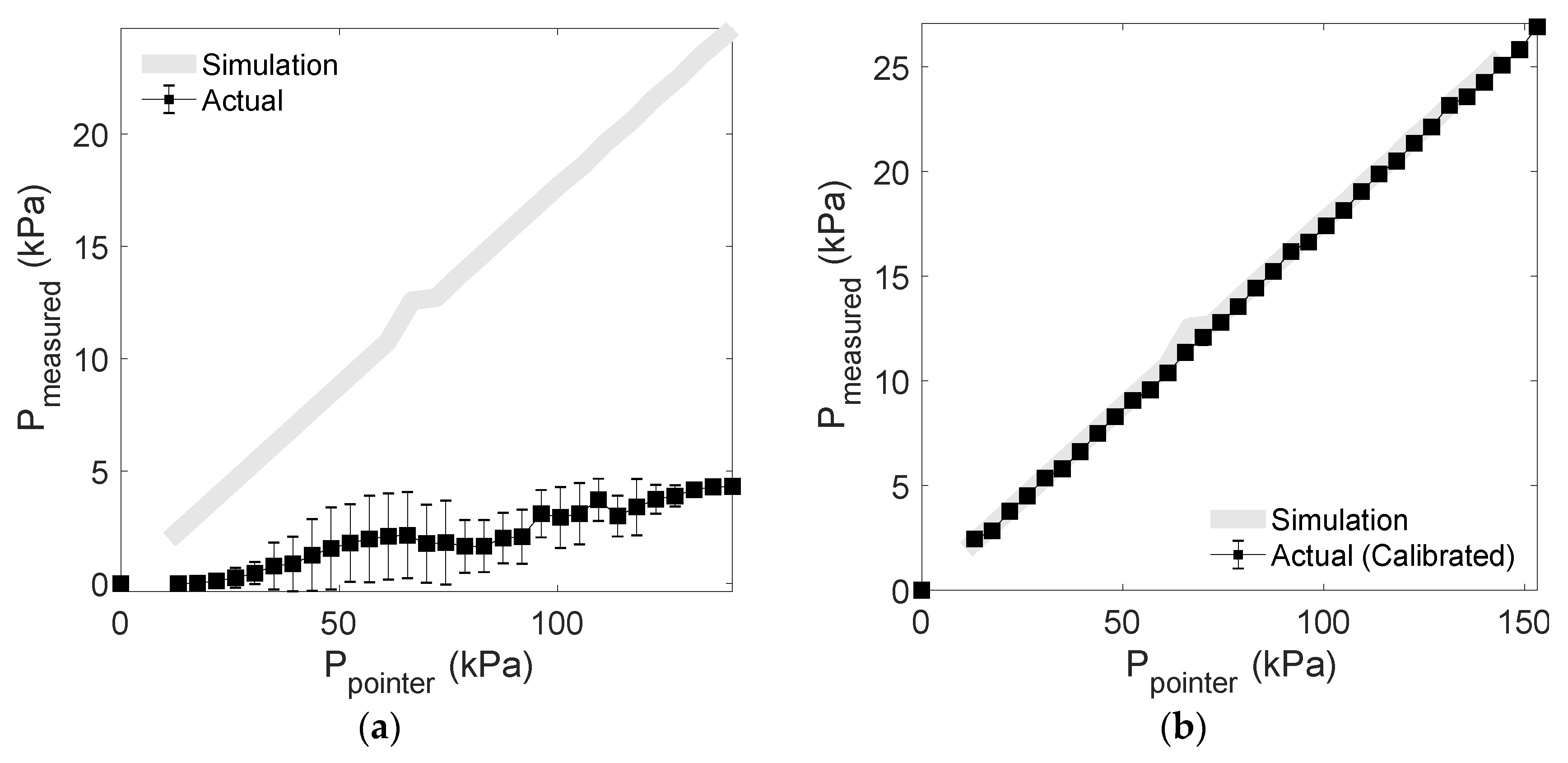
3.1. FEM Analysis Result
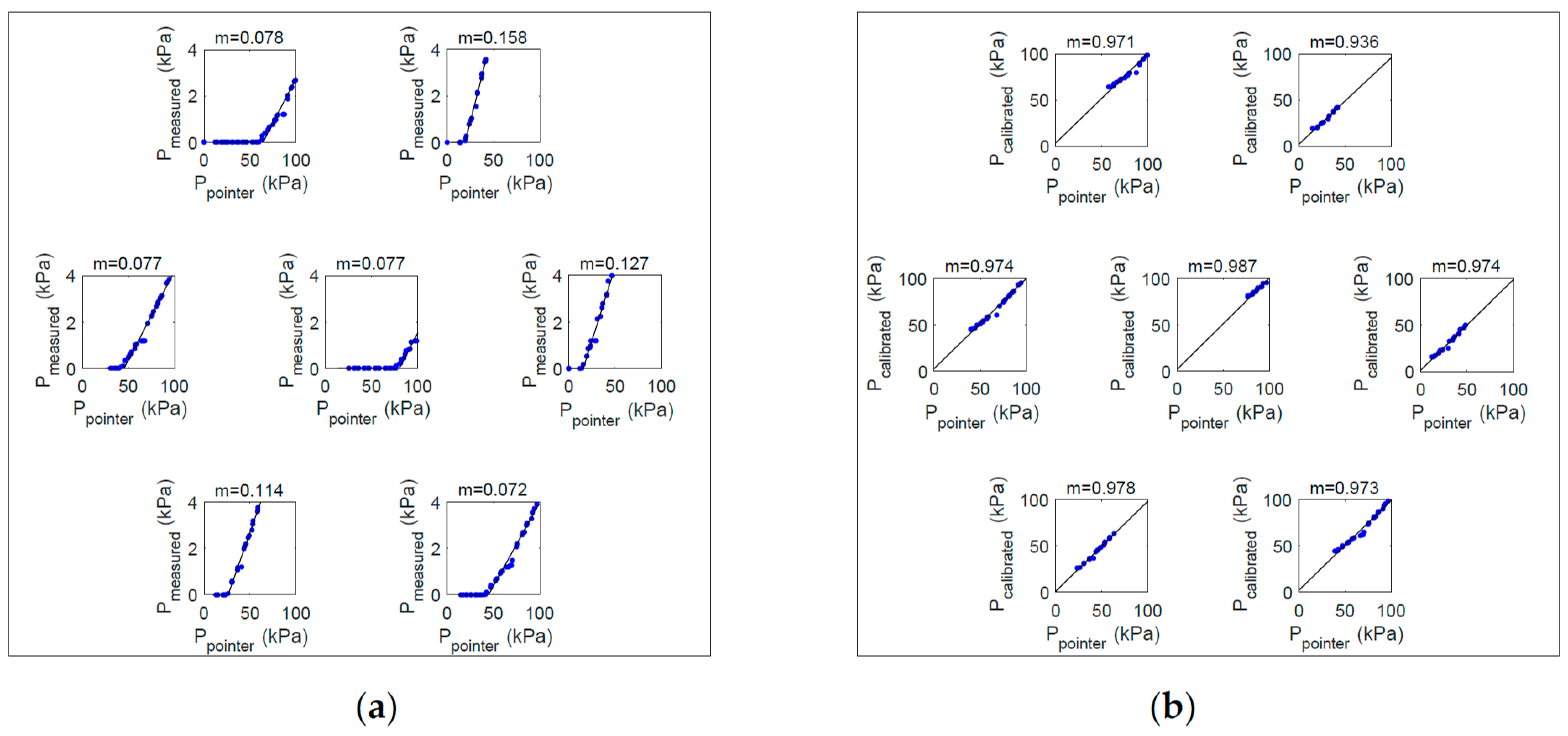
3.2. Pressure Test and Calibration Results
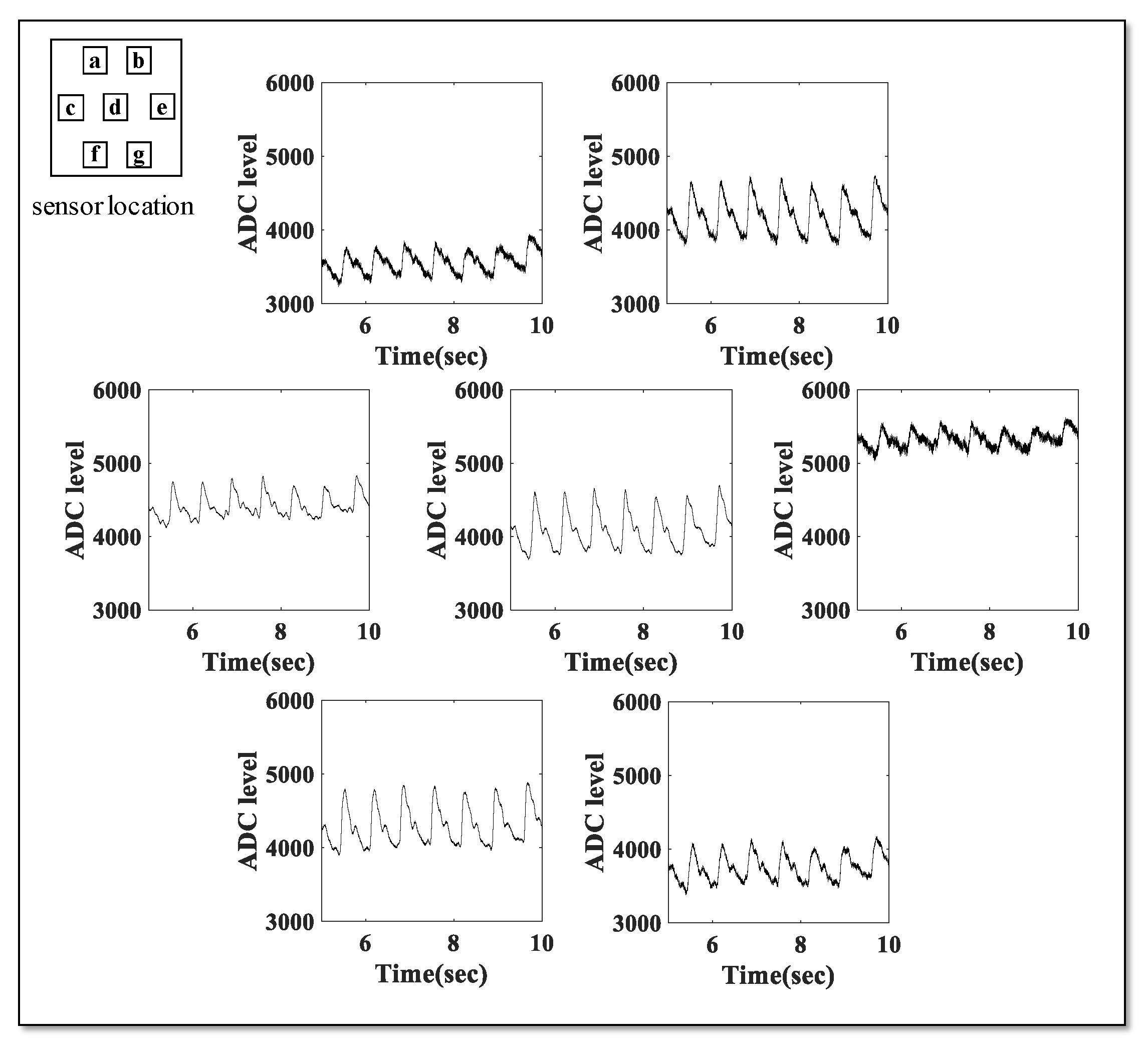
3.3. Result of Pulse Wave Measurement
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pickering, T.G.; Hall, J.E.; Appel, L.J.; Falkner, B.E.; Graves, J.; Hill, M.N.; Jones, D.W.; Kurtz, T.; Sheps, S.G.; Roccella, E.J. Recommendations for blood pressure measurement in humans and experimental animals: Part 1: Blood pressure measurement in humans: A statement for professionals from the Subcommittee of Professional and Public Education of the American Heart Association Council on High Blood Pressure Research. Circulation 2005, 111, 697–716. [Google Scholar] [PubMed] [Green Version]
- Babbs, C.F. The origin of Korotkoff sounds and the accuracy of auscultatory blood pressure measurements. J. Am. Soc. Hypertens. 2015, 9, 935–950.e3. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Geddes, L.A.; Voelz, M.; Combs, C.; Reiner, D.; Babbs, C.F. Characterization of the oscillometric method for measuring indirect blood pressure. Ann. Biomed. Eng. 1983, 10, 271–280. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ramsey, M. Blood pressure monitoring: Automated oscillometric devices. J. Clin. Monit. 1991, 7, 56–67. [Google Scholar] [CrossRef]
- Lamia, B.; Chemla, D.; Richard, C.; Teboul, J.-L. Clinical review: Interpretation of arterial pressure wave in shock states. Crit. Care 2005, 9, 601–606. [Google Scholar] [CrossRef] [Green Version]
- Truijen, J.; van Lieshout, J.J.; Wesselink, W.A.; Westerhof, B.E. Noninvasive continuous hemodynamic monitoring. J. Clin. Monit. Comput. 2012, 26, 267–278. [Google Scholar] [CrossRef] [Green Version]
- Romagnoli, S.; Romano Salvatore, M.; Bevilacqua, S.; Lazzeri, C.; Gensini Gian, F.; Pratesi, C.; Quattrone, D.; Dini, D.; De Gaudio Angelo, R. Dynamic response of liquid-filled catheter systems for measurement of blood pressure: Precision of measurements and reliability of the Pressure Recording Analytical Method with different disposable systems. J. Crit. Care 2011, 26, 415–422. [Google Scholar] [CrossRef]
- Ian, B.W.; Sabine, A.F.; Ilse, M.J.; James, C.S.; Gordon, D.M.; John, R.C.; David, J.W. Reproducibility of pulse wave velocity and augmentation index measured by pulse wave analysis. J. Hypertens. 1998, 16, 2079–2084. [Google Scholar]
- Jens, N.; Ayten, K.-S.; Anabelle, M.O.S.; Rene, R.W.; Thomas, P.; Rafael, F.S. Augmentation index is associated with cardiovascular risk. J. Hypertens. 2002, 20, 2407–2414. [Google Scholar]
- Chen, G.; Chung, E.; Meng, L.; Alexander, B.; Vu, T.; Rinehart, J.; Cannesson, M. Impact of non invasive and beat-to-beat arterial pressure monitoring on intraoperative hemodynamic management. J. Clin. Monit. Comput. 2012, 26, 133–140. [Google Scholar] [CrossRef]
- Drzewiecki, G.M.; Melbin, J.; Noordergraaf, A. Arterial tonometry: Review and analysis. J. Biomech. 1983, 16, 141–152. [Google Scholar] [CrossRef]
- Guelen, I.; Westerhof, B.E.; van der Sar, G.L.; van Montfrans, G.A.; Kiemeneij, F.; Wesseling, K.H.; Bos, W.J.W. Finometer, finger pressure measurements with the possibility to reconstruct brachial pressure. Blood Press. Monit. 2003, 8, 27–30. [Google Scholar] [CrossRef] [PubMed]
- Boehmer, R.D. Continuous, real-time, noninvasive monitor of blood pressure: Penaz methodology applied to the finger. J. Clin. Monit. 1987, 3, 282–289. [Google Scholar] [PubMed]
- Justine, I.D.; Margaret, M.B.; Stuart, P.; Simon, O.; Allan, D.S. Peripheral blood pressure measurement is as good as applanation tonometry at predicting ascending aortic blood pressure. J. Hypertens. 2003, 21, 571–576. [Google Scholar]
- Matti, K.; Tuukka, P.; Joni, L.; Risto, P.; Mojtaba Jafari, T.; Tuija, V.; Samuli, J.; Tuomas, K.; Juhani, A.; Pekka, K.; et al. Clinical assessment of a non-invasive wearable MEMS pressure sensor array for monitoring of arterial pulse waveform, heart rate and detection of atrial fibrillation. NPJ Digit. Med. 2019, 2, 39. [Google Scholar]
- Rashad, Z.; Andreas, G.; Ju-Yeon, L.; HeeJung, K.; So-Hyun, J.-P.; Thomas, S.-R.; Giulia, M.; Heike, S.; Rüdiger, A.; Nima, H.; et al. Comparison between radial artery tonometry pulse analyzer and pulsed-Doppler echocardiography derived hemodynamic parameters in cardiac surgery patients: A pilot study. PeerJ 2017, 5, e4132. [Google Scholar]
- Alejandro Velasco, M.; Chikako Ono, M.; Kenneth Nugent, M.; Ashwani Kumar, M. Ultrasonic evaluation of the radial artery diameter in a local population from Texas. J. Invasive Cardiol. 2012, 24, 339–341. [Google Scholar]
- Kotowycz Mark, A.; Johnston, K.W.; Ivanov, J.; Asif, N.; Almoghairi Abdulrahman, M.; Choudhury, A.; Nagy Christian, D.; Sibbald, M.; Chan, W.; Seidelin Peter, H.; et al. Predictors of Radial Artery Size in Patients Undergoing Cardiac Catheterization: Insights From the Good Radial Artery Size Prediction (GRASP) Study. Can. J. Cardiol. 2014, 30, 211–216. [Google Scholar] [CrossRef]
- Loh, Y.J.; Nakao, M.; Tan, W.D.; Lim, C.H.; Tan, Y.S.; Chua, Y.L. Factors Influencing Radial Artery Size. Asian Cardiovasc. Thorac. Ann. 2007, 15, 324–326. [Google Scholar] [CrossRef]
- Okuyan, H.; Hzal, F.; Taçoy, G.; Timurkaynak, T. Angiographic evaluation of the radial artery diameter in patients who underwent coronary angiography or coronary intervention. J. Invasive Cardiol. 2013, 25, 353–357. [Google Scholar]
- Riekkinen, H.V.; Karkola, K.O.; Kankainen, A. The radial artery is larger than the ulnar. Ann. Thorac. Surg. 2003, 75, 882–884. [Google Scholar] [CrossRef]
- Dharma, S.; Kedev, S.; Patel, T.; Rao, S.V.; Bertrand, O.F.; Gilchrist, I.C. Radial artery diameter does not correlate with body mass index: A duplex ultrasound analysis of 1706 patients undergoing trans-radial catheterization at three experienced radial centers. Int. J. Cardiol. 2017, 228, 169–172. [Google Scholar] [CrossRef] [PubMed]
- Garg, N.; Madan, B.; Khanna, R.; Sinha, A.; Kapoor, A.; Tewari, S.; Kumar, S.; Goel, P.K. Incidence and predictors of radial artery occlusion after transradial coronary angioplasty: Doppler-guided follow-up study. J. Invasive Cardiol. 2015, 27, 106–112. [Google Scholar] [PubMed]
- XGZP2004 Pressure Sensor Chip. Available online: http://cfsensor.com/editor/attached/file/20180326/20180326120024_8388. (accessed on 19 December 2019).
- Johnston, I.; McCluskey, D.; Tan, C.; Tracey, M. Mechanical characterization of bulk Sylgard 184 for microfluidics and microengineering. J. Micromech. Microeng. 2014, 24, 3. [Google Scholar] [CrossRef]
- Xie, D.; Chin, C.; Ang, K.; Lau, D.; Shangguan, D. A new method to evaluate BGA pad cratering in lead-free soldering. In Proceedings of the 58th Electronic Components and Technology Conference, Lake Buena Vista, FL, USA, 27–30 May 2008; pp. 893–898. [Google Scholar]
- Dolbow, J.; Gosz, M. Effect of out-of-plane properties of a polyimide film on the stress fields in microelectronic structures. Mech. Mater. 1996, 23, 311–321. [Google Scholar] [CrossRef]
- Torres, J.; Cotelo, J.; Karl, J.; Gordon, A.P. Mechanical property optimization of FDM PLA in shear with multiple objectives. JOM 2015, 67, 1183–1193. [Google Scholar] [CrossRef]
- Chen, G.-S.; Ju, M.-S.; Fang, Y.-K. Effects of monolithic silicon postulated as an isotropic material on design of microstructures. Sens. Actuators A Phys. 2000, 86, 108–114. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications | Value |
|---|---|
| Size | 2.0 × 2.0 × 0.4 mm |
| Range | 0–40 kPa, (0–300 mmHg) |
| Full scale output | 50–90 mV |
| Repeatability | ±0.2% full scale |
| Non-linearity | ±0.3% full scale |
| Hysteresis | ±0.2% full scale |
| Ambient temperature | −40–125 °C |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roh, D.; Han, S.; Park, J.; Shin, H. Development of a Multi-Array Pressure Sensor Module for Radial Artery Pulse Wave Measurement. Sensors 2020, 20, 33. https://doi.org/10.3390/s20010033
Roh D, Han S, Park J, Shin H. Development of a Multi-Array Pressure Sensor Module for Radial Artery Pulse Wave Measurement. Sensors. 2020; 20(1):33. https://doi.org/10.3390/s20010033
Chicago/Turabian StyleRoh, Donggeun, Sangjin Han, Junyung Park, and Hangsik Shin. 2020. "Development of a Multi-Array Pressure Sensor Module for Radial Artery Pulse Wave Measurement" Sensors 20, no. 1: 33. https://doi.org/10.3390/s20010033