Machine Learning Methodology in a System Applying the Adaptive Strategy for Teaching Human Motions


Abstract
:1. Introduction
1.1. Motor Learning
- Teaching methods should be adaptive, i.e., they should be able to adapt automatically to the specific teaching conditions and changing phases of the entire teaching process [13].
1.2. The Motion Capture Process
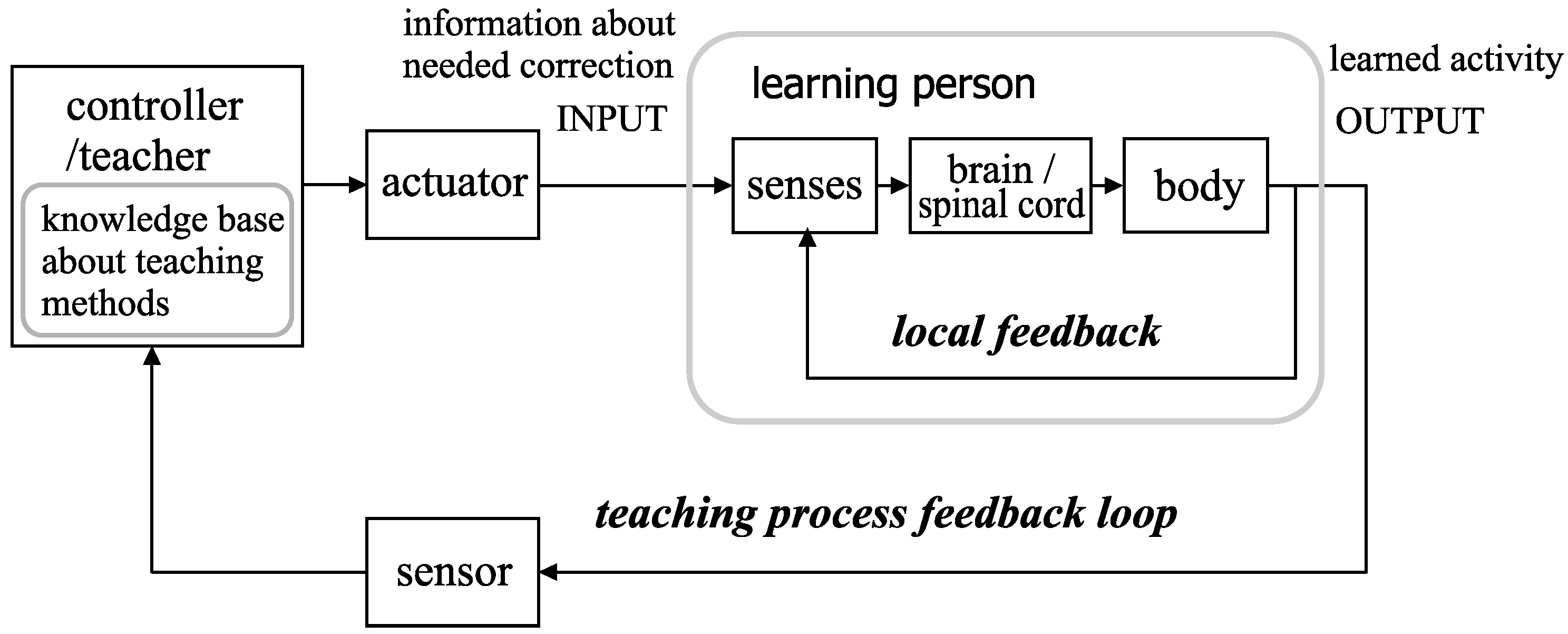
1.3. The Communication between Teacher and Learner
1.4. Classification Processes in Teaching Algorithms
1.5. Related Work
1.6. Study Objectives
- uses an array of MEMS inertial sensors,
- utilizes vibrotactile actuators to ensure system–learner communication, and
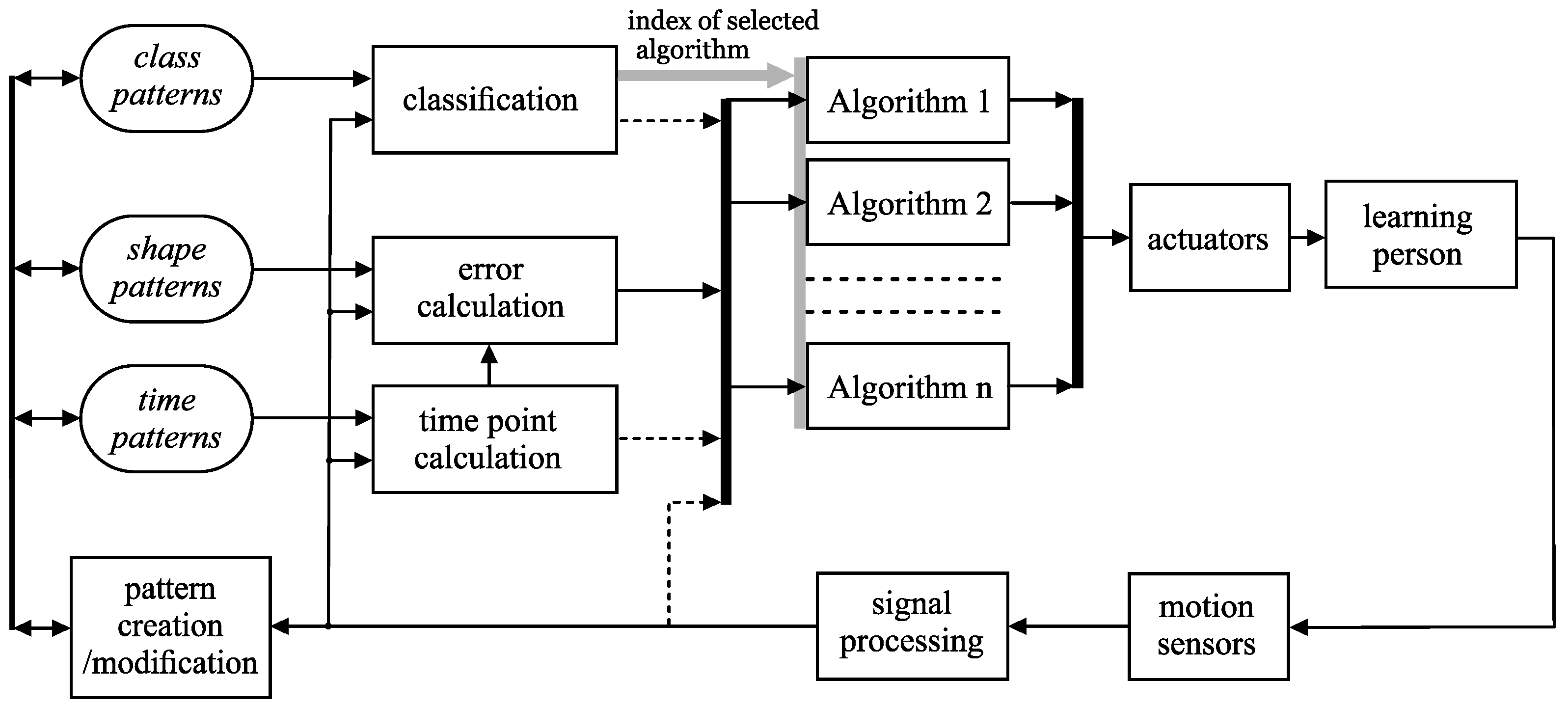
- applies the classification process to select the adequate teaching algorithm?
2. The Motion Activity Teaching System
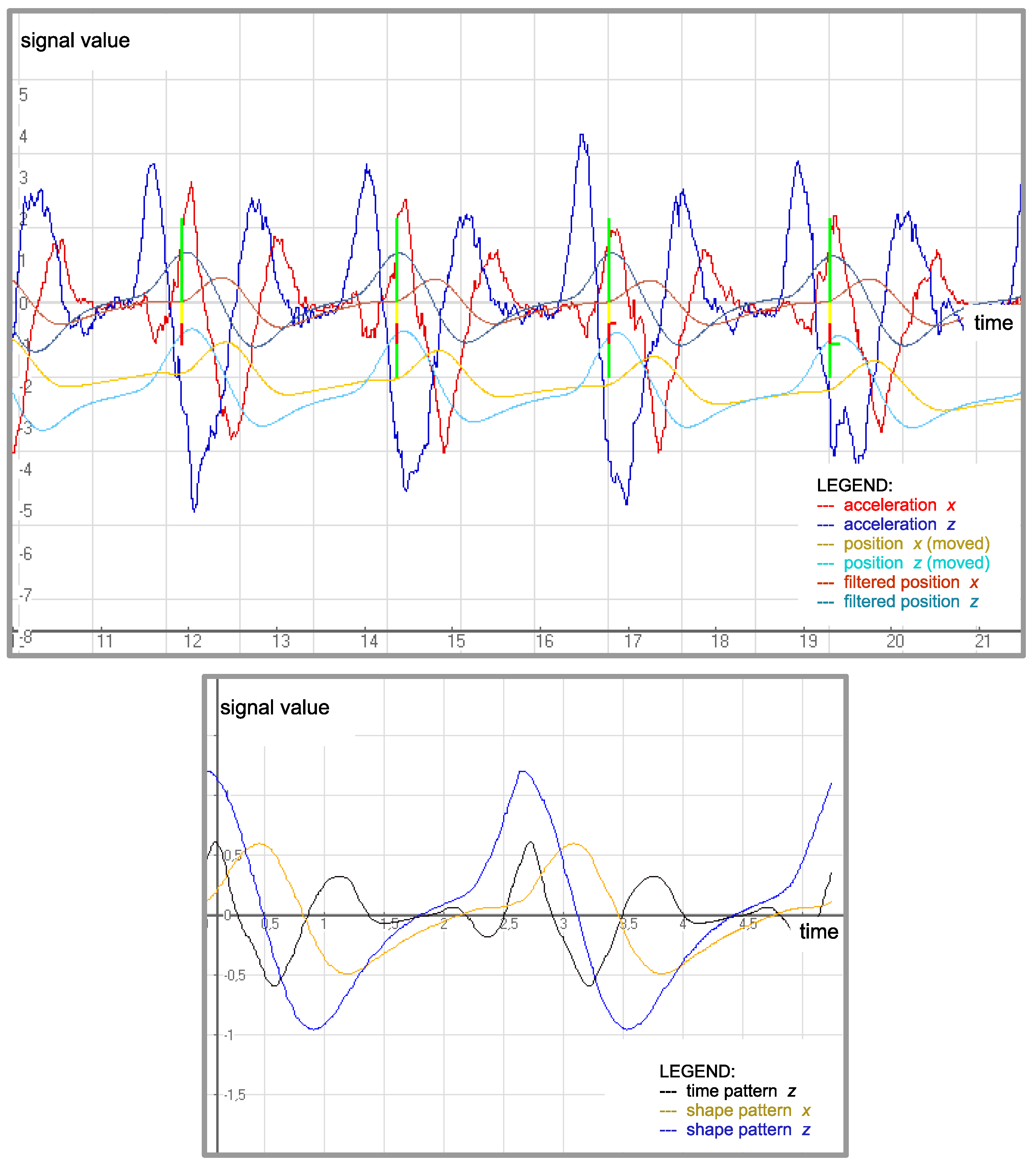
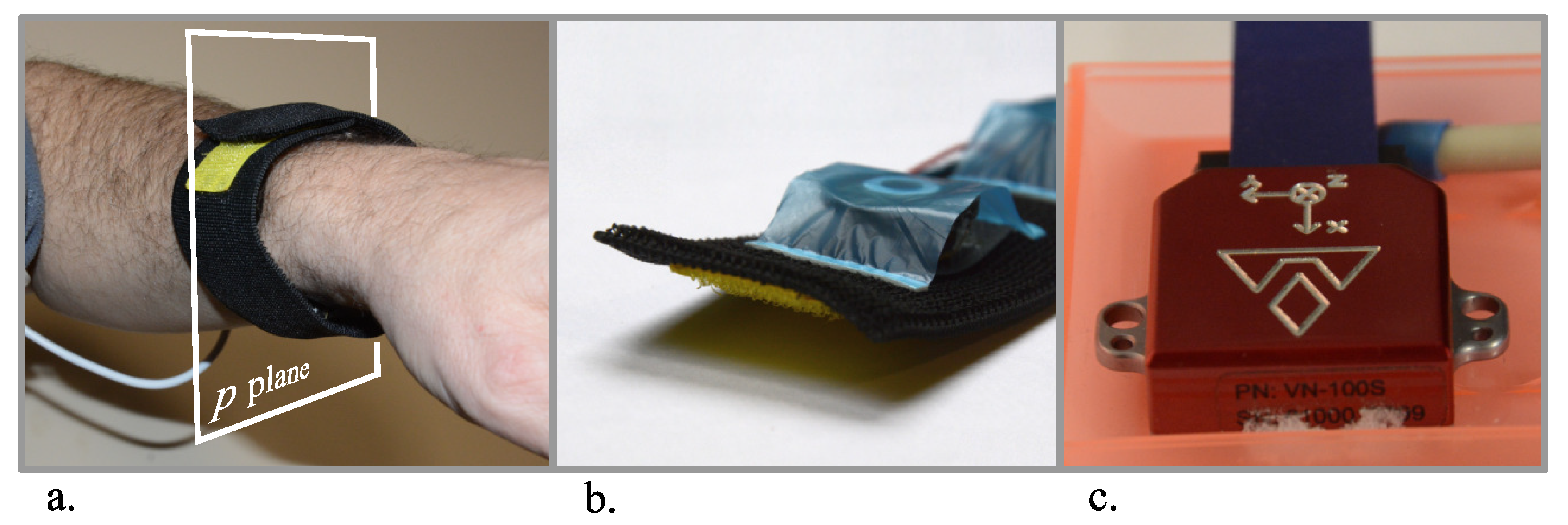
2.1. The Motion Sensors and Preprocessing of Their Signals
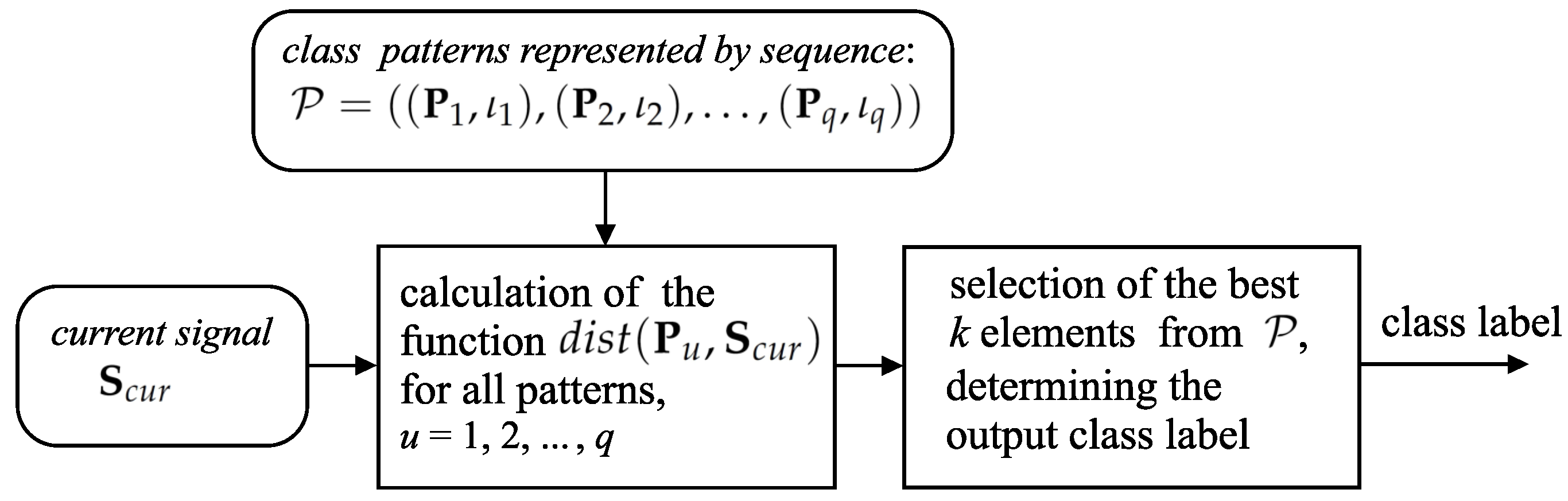
2.2. Choosing the Classification Method
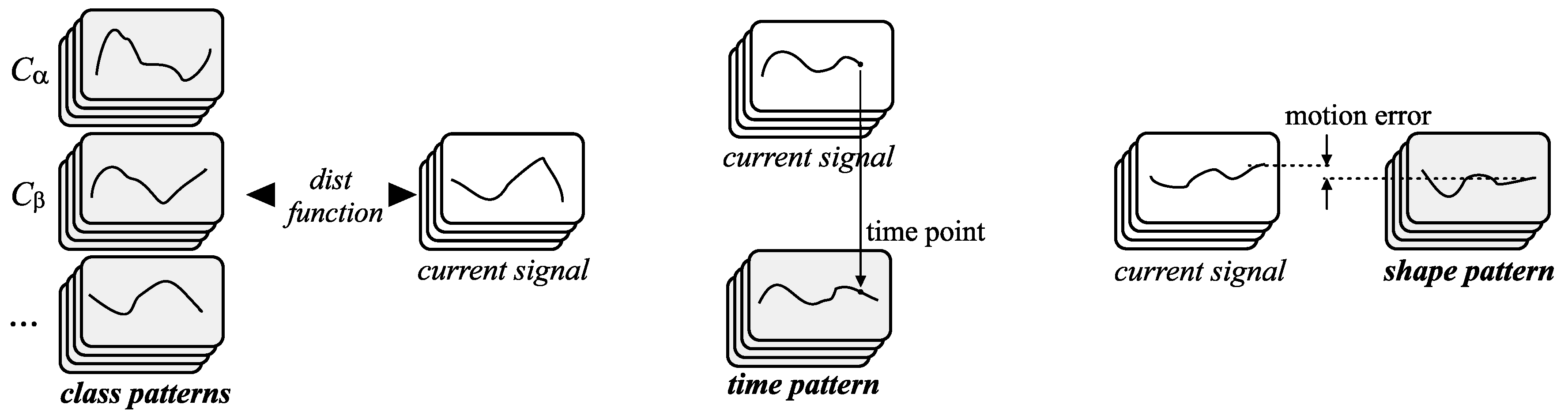
2.3. Signal Patterns and Definition of the Distance Function
2.4. The Calculation of the h Function
2.5. The Creation and Updating of Patterns
2.6. The Synchronization of Patterns
2.7. The Calculation of Motion Error
2.8. Actuators and Calculation of Their Activity
- A person’s inability to properly interpret the fast changing signals of the actuator; this obvious and fundamental constraint is especially apparent in the detection and interpretation of the actuator signals, which indicate, in succession, different directions of movement.
- The need to select the optimal parameters of vibrotactile unit impulses so the learner can best perceive and interpret them [18].
- The requirement to limit the number of actuators activated in a single period of motion; usually, during the course of a single motion period, the learner is able to interpret the signals derived from only a single actuator correctly (the remaining actuators exert a disturbing effect).
2.9. Algorithms of Motion Teaching Corresponding to Particular Classes
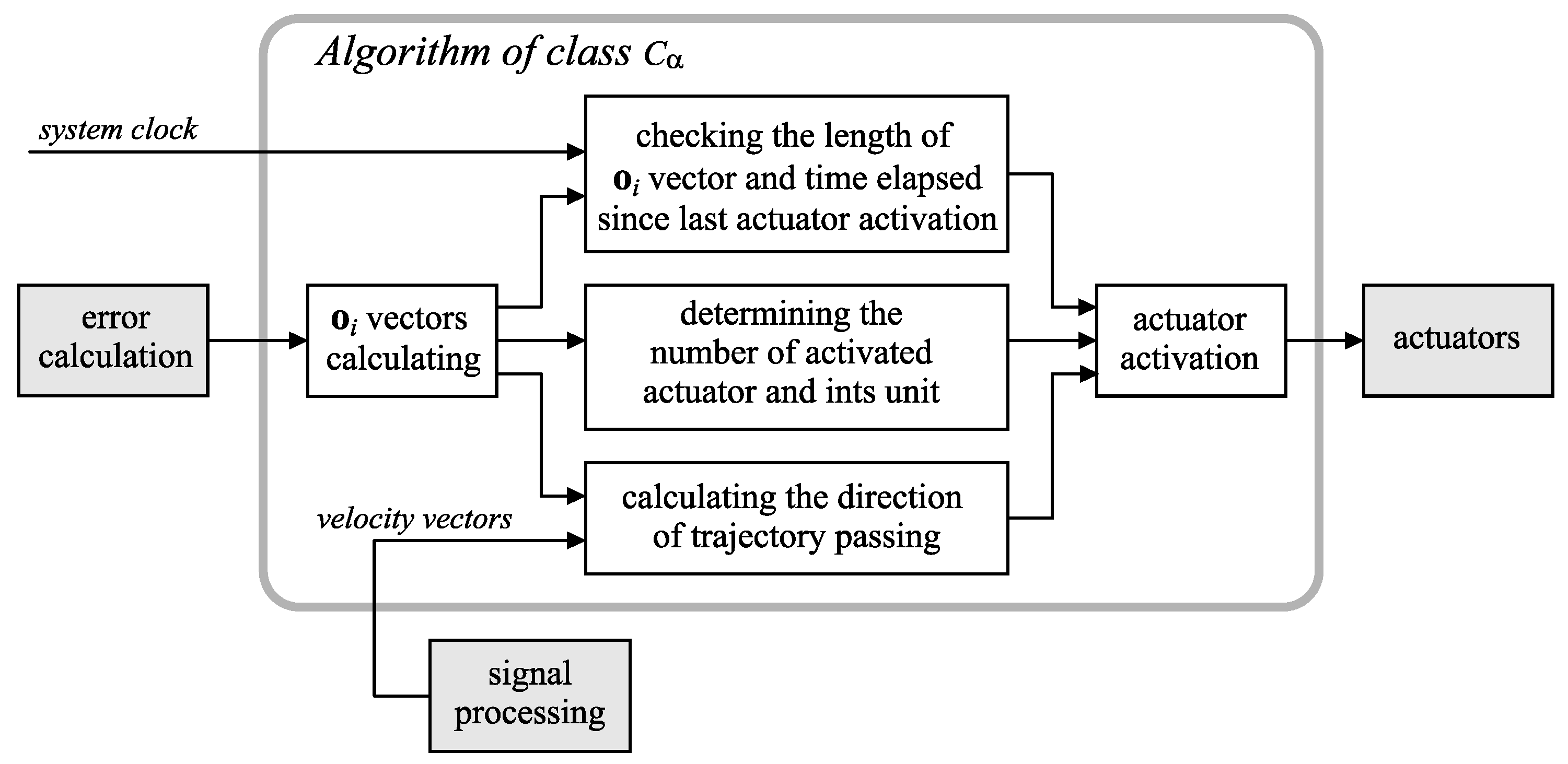
2.9.1. Algorithm of Class
2.9.2. Algorithm of Class
3. Results of System Testing
3.1. Goals of the Experiment
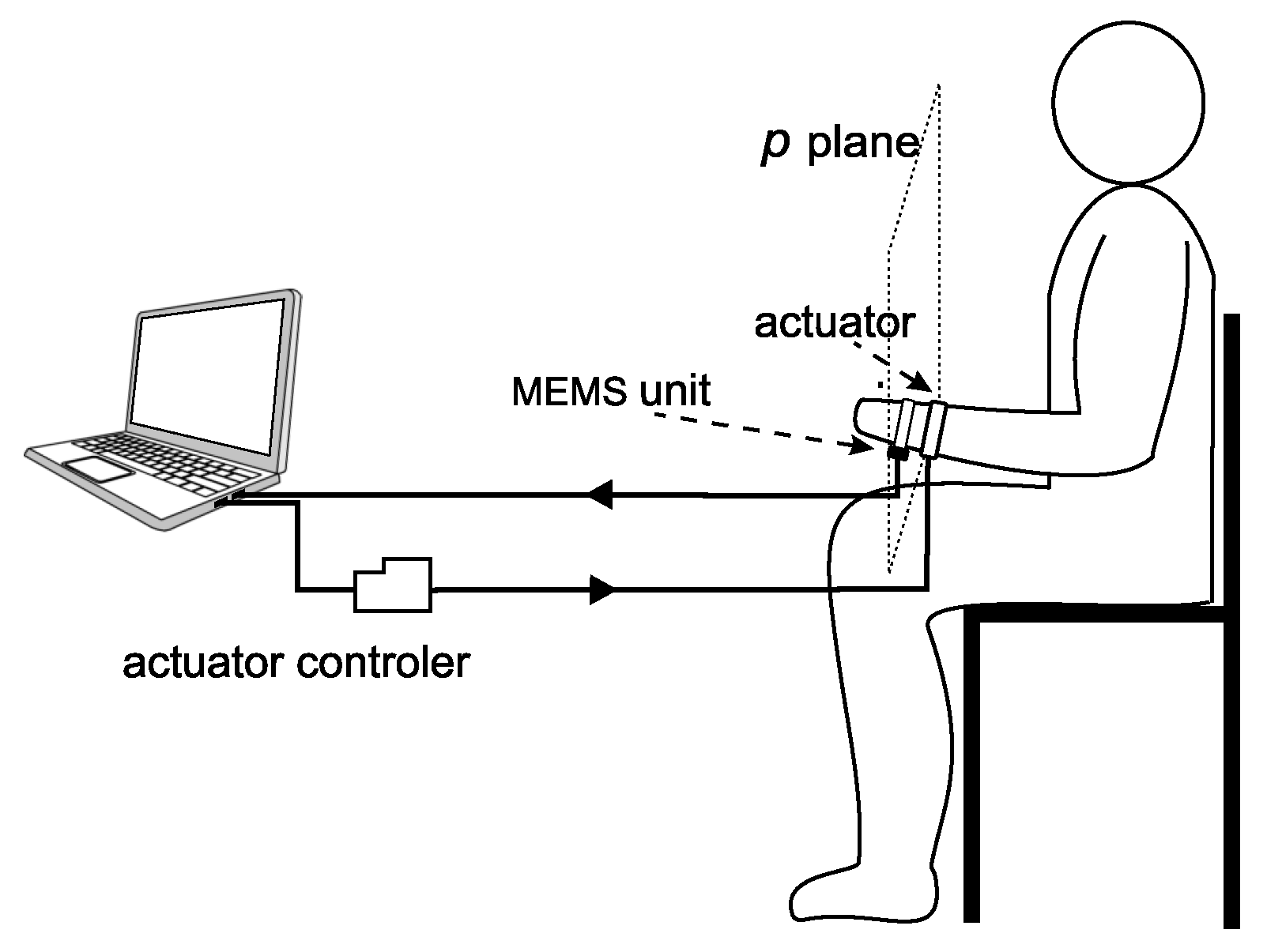
3.2. Components of the Tested Learning System Prototype
3.3. Participants
- possessing the skill of swimming using the butterfly stroke,
- lack of normal motor control of the upper extremities,
- a history of neurological disorders (declared by the subject).
3.4. Teaching Algorithms and Signal Classes Used in the Test
3.5. Test Procedure
3.6. Outcome Measures and Data Analysis
3.7. Test Results and Discussion
3.7.1. The High Level of Motion Errors
3.7.2. The Problem of Properly Interpreting Haptic Messages
3.7.3. Creating Efficient Teaching Systems
3.7.4. Expert’s Knowledge and Problems of System Optimization
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Schmidt, R.A.; Lee, T.D. Motor Learning and Performance: From Principles to Application, 5th ed.; Human Kinetics: Champaign, IL, USA, 2014; pp. 1–315, ISBN-10:1-4504-4361-3. [Google Scholar]
- Marchal-Crespo, L.; Reinkensmeyer, D.J. Review of control strategies for robotic movement training after neurologic injury. J. NeuroEng. Rehabil. 2009, 6. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bächlin, M.; Förster, K.; Tröster, G. SwimMaster: A Wearable Assistant for Swimmer. In Proceedings of the 11th International Conference UbiComp 2009, Orlando, FL, USA, 30 September–3 October 2009; pp. 215–224. [Google Scholar]
- Spelmezan, D.; Hilgers, A.; Borchers, J. A language of tactile motion instructions. In Proceedings of the 14th International Conference on Human–Computer Interaction with Mobile Devices and Services, San Francisco, CA, USA, 21–24 September 2012; pp. 15–18. [Google Scholar]
- Moeyersons, B.; Fuss, F.K.; Tan, A.M.; Weizman, Y. Biofeedback system for novice snowboarding. Procedia Eng. 2016, 147, 781–786. [Google Scholar] [CrossRef] [Green Version]
- Stamm, A. Investigating Stroke Length and Symmetry in Freestyle Swimming Using Inertial Sensors. Proceedings 2018, 2, 284. [Google Scholar] [CrossRef] [Green Version]
- Umek, A.; Kos, A. Wearable sensors and smart equipment for feedback in watersports. Procedia Comput. Sci. 2018, 129, 496–502. [Google Scholar] [CrossRef]
- Żywicki, K.; Zawadzki, P.; Górski, F. Virtual reality production training system in the scope of intelligent factory. In Proceedings of the International Conference on Intelligent Systems in Production Engineering and Maintenance, Wrocław, Poland, 28–29 September 2017; pp. 450–458. [Google Scholar]
- Wang, R.; Yao, J.; Wang, L.; Liu, X.; Wang, H.; Zheng, L. A surgical training system for four medical punctures based on virtual reality and haptic feedback. In Proceedings of the 2017 IEEE Symposium on 3D User Interfaces (3DUI), Los Angeles, CA, USA, 18–19 March 2017; pp. 215–216. [Google Scholar]
- Petermeijer, S.M.; Abbink, D.A.; Mulder, M.; de Winter, J.C. The Effect of Haptic Support Systems on Driver Performance: A Literature Survey. IEEE Trans. Haptics 2015, 8, 467–479. [Google Scholar] [CrossRef]
- Ni, Z.; Bolopion, A.; Agnus, J.; Benosman, R.; Regnier, S. Asynchronous Event–Based Visual Shape Tracking for Stable Haptic Feedback in Microrobotics. IEEE Trans. Robotics 2012, 28, 1081–1089. [Google Scholar]
- Dorf, R.C.; Bishop, R.H. Modern Control Systems, 12th ed.; Pearson Education, Inc.: Upper Saddle River, NJ, USA, 2011; pp. 15–90. [Google Scholar]
- van Breda, E.; Verwulgen, S.; Saeys, W.; Wuyts, K.; Peeters, T.; Truijen, S. Vibrotactile feedback as a tool to improve motor learning and sports performance: A systematic review. BMJ Open Sport Exerc. Med. 2017, 3, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Sigrist, R.; Rauter, G.; Riener, R.; Wolf, P. Augmented visual, auditory, haptic, and multimodal feedback in motor learning: A review. Psychon. Bull. Rev. 2013, 20, 21–53. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Leightley, D.; McPhee, J.S.; Yap, M.H. Automated Analysis and Quantification of Human Mobility Using a Depth Sensor. IEEE J. Biomed. Heal. Inform. 2017, 21, 939–948. [Google Scholar] [CrossRef] [Green Version]
- Alonso, J.V.; Dieguez, D.C.; Matencio, P.L.; Alcaraz, J.J.; Parrado-Garcia, F.J.; Gonzalez-Castano, F.J. SAETA: A Smart Coaching Assistant for Professional Volleyball Training. IEEE Trans. Syst. Man, Cybern. Syst. 2015, 45, 1138–1150. [Google Scholar] [CrossRef]
- Muñoz-Organero, M.; Powell, L.; Heller, B.; Harpin, V.; Parker, J. Using Recurrent Neural Networks to Compare Movement Patterns in ADHD and Normally Developing Children Based on Acceleration Signals from the Wrist and Ankle. Sensors 2019, 19, 2935. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bark, K.; Hyman, E.; Tan, F.; Cha, E.; Jax, S.A.; Buxbaum, L.J.; Kuchenbecker, K.J. Effects of Vibrotactile Feedback on Human Learning of Arm Motions. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 51–63. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zahradka, N.; Behboodi, A.; Wright, H.; Bodt, B.; Lee, S. Evaluation of Gait Phase Detection Delay Compensation Strategies to Control a Gyroscope-Controlled Functional Electrical Stimulation System During Walking. Sensors 2019, 19, 2471. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Haladjian, J.; Reif, M.; Brügge, B. VIHapp: A wearable system to support blind skiing. In Proceedings of the 2017 ACM International Joint Conference on Pervasive and Ubiquitous Computing and Proceedings of the 2017 ACM International Symposium on Wearable Computers, Maui, HI, USA, 11–15 September 2017; pp. 1033–1037. [Google Scholar]
- Taborri, J.; Palermo, E.; Rossi, S. Automatic Detection of Faults in Race Walking: A Comparative Analysis of Machine-Learning Algorithms Fed with Inertial Sensor Data. Sensors 2019, 19, 1461. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Wang, J.; Zhao, H.; Qiu, S.; Li, J.; Gao, F.; Shi, X. Using wearable sensors to capture posture of the human lumbar spine in competitive swimming. IEEE Trans. Hum. Mach. Syst. 2019, 49, 194–205. [Google Scholar] [CrossRef]
- Jiao, L.; Wu, H.; Bie, R.; Umek, A.; Kos, A. Multi-sensor golf swing classification using deep CNN. Procedia Comput. Sci. 2018, 129, 59–65. [Google Scholar] [CrossRef]
- Hachaj, T.; Ogiela, M.R.; Piekarczyk, M. Real-time recognition of selected karate techniques using GDL approach. In Image Processing and Communications Challenges 5; Springer: Berlin/Heidelberg, Germany, 2014; pp. 99–106. [Google Scholar]
- Hachaj, T.; Piekarczyk, M.; Ogiela, M.R. Human actions analysis: Templates generation, matching and visualization applied to motion capture of highly-skilled karate athletes. Sensors 2017, 17, 2590. [Google Scholar] [CrossRef] [Green Version]
- Kinect for Windows. Available online: https://developer.microsoft.com/en-us/windows/kinect (accessed on 25 July 2019).
- Zhang, X.; Chen, X.; Li, Y.; Lantz, V.; Wang, K.; Yang, J. A Framework for Hand Gesture Recognition Based on Accelerometer and EMG Sensors. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2011, 41, 1064–1076. [Google Scholar] [CrossRef]
- Duda, R.O.; Hart, P.E.; Stork, D.G. Pattern Classification, 2nd ed.; Wiley–Interscience Publication: New York, NY, USA, 2001; pp. 1–347, ISBN-0-471-05669-3. [Google Scholar]
- Marques de Sá, J.P. Pattern Recognition: Concepts, Methods and Applications; Springer: Berlin/Heidelberg, Germany, 2001; pp. 79–285, ISBN-978-3-642-62677-7. [Google Scholar]
- Guo, G.; Wang, H.; Bell, D.; Bi, Y.; Greer, K. KNN Model-Based Approach in Classification. In OTM Confederated International Conferences “On the Move to Meaningful Internet Systems”; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Zmitri, M.; Fourati, H.; Vuillerme, N. Human Activities and Postures Recognition: From Inertial Measurements to Quaternion-Based Approaches. Sensors 2019, 19, 4058. [Google Scholar] [CrossRef] [Green Version]
- Mannini, A.; Sabatini, A.M. Machine Learning Methods for Classifying Human Physical Activity from On–Body Accelerometers. Sensors 2010, 10, 1154–1175. [Google Scholar] [CrossRef] [Green Version]
- Wójcik, K. Hierarchical Knowledge Structure Applied to Image Analyzing System—Possibilities of Practical Usage. In Proceedings of the International Conference on Availability, Reliability and Security for Business, Enterprise and Health Information Systems (ARES 2011), Vienna, Austria, 22–26 August 2011. [Google Scholar]
- Piekarczyk, M.; Ogiela, M.R. Hierarchical Graph–Grammar Model for Secure and Efficient Handwritten Signatures Classification. J. Univers. Comput. Sci. 2011, 17, 926–943. [Google Scholar] [CrossRef]
- Li, G.; Tang, H.; Sun, Y.; Kong, J.; Jiang, G.; Jinag, D.; Tao, B.; Xu, S.; Liu, H. Hand gesture recognition based on convolution neural network. Cluster Computing 2019, 22, 2719–2729. [Google Scholar] [CrossRef]
- Faisal, A.I.; Majumder, S.; Mondal, T.; Cowan, D.; Naseh, S.; Deen, M.J. Monitoring Methods of Human Body Joints: State-of-the-Art and Research Challenges. Sensors 2019, 19, 2629. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hagras, H.; Callaghan, V.; Colley, M.; Clarke, G.; Duman, H. Online Learning and Adaptation for Intelligent Embedded Agents Operating in Domestic Environments. In Autonomous Robotic Systems. Studies in Fuzziness and Soft Computing; Springer: Berlin/Heidelberg, Germany, 2003; Volume 116, pp. 293–322. [Google Scholar] [CrossRef]
- Biswas, G.; Leelawong, K.; Schwartz, D.; Vye, N. Learning by Teaching: A New Agent Paradigm for Educational Software. Appl. Artif. Intell. Int. J. 2005, 19, 363–392. [Google Scholar] [CrossRef]
- Tsekouras, D.; Li, T.; Benbasat, I. Scratch My Back and I’ll Scratch Yours: The Impact of the Interaction Between User Effort and Recommendation Agent Effort on Perceived Recommendation Agent Quality. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=3258053 (accessed on 29 November 2019).
- Rawassizadeh, R.; Sen, T.; Kim, S.J.; Meurish, C.; Keshavarz, H.; Mühlhäuser, M.; Pazzani, M. Manifestation of virtual assistants and robots into daily life: Vision and challenges. CCF Trans. Pervasive Comput. Interact. 2019, 1, 163–174. [Google Scholar] [CrossRef] [Green Version]
- VN-100 IMU/AHRS. Available online: https://www.vectornav.com/products/vn-100 (accessed on 25 March 2019).
- Du, J.; Gerdtman, C.; Lindén, M. Signal Quality Improvement Algorithms for MEMS Gyroscope-Based Human Motion Analysis Systems: A Systematic Review. Sensors 2018, 18, 1123. [Google Scholar] [CrossRef] [Green Version]
- Boashash, B. Time–Frequency Signal Analysis and Processing. In A Comprehensive Reference; Elsevier: Oxford, UK, 2003; pp. 1–681, ISBN-0-08-044335-4. [Google Scholar]
- van Hateren, J.H. Fast recursive filters for simulating nonlinear dynamic systems. Neural Comput. 2008, 20, 1821–1846. [Google Scholar] [CrossRef] [Green Version]
- Mokhlespour Esfahani, M.I.; Nussbaum, M.A. Classifying Diverse Physical Activities Using “Smart Garments”. Sensors 2019, 19, 3133. [Google Scholar] [CrossRef] [Green Version]
- Shen, D. Some Mathematics for HMM. Available online: https://pdfs.semanticscholar.org/4ce1/9ab0e07da9aa10be1c336400c8e4d8fc36c5.pdf (accessed on 25 September 2019).
- Adistambha, K.; Ritz, C.H.; Burnett, I.S. Motion classification using Dynamic Time Warping. In Proceedings of the IEEE 10th Workshop on Multimedia Signal Processing, Cairns, Australia, 8–10 October 2008; pp. 622–627. [Google Scholar]
- Russell, S.; Norvig, P. Artificial Intelligence: A Modern Approach, 3rd ed.; Pearson Education, Inc.: Upper Saddle River, NJ, USA, 2016; ISBN-13: 978-013604259-4. [Google Scholar]
- Rani, S.; Sikka, G. Recent Techniques of Clustering of Time Series Data: A Survey. Int. J. Comput. Appl. 2012, 52, 1–9. [Google Scholar] [CrossRef]
- Everitt, B.S.; Landau, S.; Leese, M.; Stahl, D. Cluster Analysis; Wiley: Chichester, UK, 2011; ISBN 978-0-470-74991-3. [Google Scholar]
- Schönauer, C.; Fukushi, K.; Olwal, A.; Kaufmann, H.; Raskar, R. Multimodal Motion Guidance: Techniques for Adaptive and Dynamic Feedback. In Proceedings of the ICMI’12—14th ACM International Conference on Multimodal Interaction, Santa Monica, CA, USA, 22–26 October 2012; pp. 133–140. [Google Scholar]
- Shishov, N.; Melzer, I.; Bar-Haim, S. Parameters and Measures in Assessment of Motor Learning in Neurorehabilitation: A Systematic Review of the Literature. Front. Hum. Neurosci. 2017, 11, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Ao, D.; Song, R.; Tong, R.K. Sensorimotor Control of Tracking Movements at Various Speeds for Stroke Patients as Well as Age–Matched and Young Healthy Subjects. PLoS ONE 2015, 10, e0128328. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors and Works | Application Field | Sensors | Communications to Learners | Scope of Analysis |
|---|---|---|---|---|
| Zahradka, Behboodi et al. [19], 2019 | neuromuscular rehabilitation | MEMS IMU | functional electrical stimulation | online gait phase detection |
| Bark, Hyman [18], 2015 | rehabilitation after stroke | infrared camera | haptic, visual | position controlling |
| Haladjian, Reif, BrĂĽgge [20], 2017 | rehabilitation, sports skiing | MEMS IMU | haptic | guiding for visually impaired skiers |
| Taborri, Palermo, Rossi et al. [21], 2019 | sports race walking | MEMS IMU | without communication | offline classification for referee’s and trainer’s analysis |
| Alonso, Dieguez et al. [16], 2015 | sports volleyball | biometric sensors | without communication | online classification for trainer’s analysis |
| Stamm [6], 2018 | sports swimming | MEMS IMU | without communication | offline analysis for trainer |
| Wang, Wang, Zhao et al. [22], 2019 | sports swimming | MEMS IMU | without communication | offline analysis of movement parameters |
| Umek, Kos et al. [7], 2018 | sports swimming, kayaking | MEMS IMU | without communication | online monitoring for trainer’s analysis |
| Jiao, Wu, Bie, Umek, Kos [23], 2018 | sports golf | MEMS IMU | without communication | offline classification for trainer’s analysis |
| Moeyersons, Fuss, Tan, Weizman [5], 2016 | sports snowboarding | pressure sensors | haptic, visual | trainer’s online analysis and feedback |
| Hachaj, Ogiela, Piekarczyk [24], 2014 | sports karate | multiple infrared depth cameras | without communication | online classification for trainer’s analysis |
| Hachaj, Piekarczyk, Ogiela [25], 2017 | sports karate | MEMS IMU | without communication | offline classification for trainer’s analysis |
| Wang, Yao et al. [9], 2017 | surgical training | MEMS IMU joystick | haptic, visual | online surgery simulation and analysis |
| Żywicki, Zawadzki, Górski [8], 2017 | work skills training (Industry 4.0) | MEMS IMU | haptic, visual | online simulation of operation in factory |
| Method | Time Complexity of the Classifier | Classification Time (ms) | Classification Error Level (%) | Possibility to Interpret |
|---|---|---|---|---|
| HMM | 0.003 | 14 | possible, but difficult | |
| kNNModel | 3.7 | 11 | easy |
| Parameter | Method | Participant Index in the Group | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | ||
| 1 | 63 | 102 | 80 | 79 | 57 | 73 | 57 | 75 | 56 | |
| 2 | 137 | 87 | 102 | 160 | 72 | 77 | 69 | 96 | 51 | |
| 1 | 50 | 109 | 80 | 81 | 41 | 79 | 63 | 67 | 52 | |
| 2 | 129 | 99 | 131 | 156 | 54 | 79 | 65 | 96 | 54 | |
| 1 | 16 | 92 | 44 | 59 | 11 | 64 | 45 | 45 | 22 | |
| 2 | 104 | 74 | 93 | 122 | 41 | 44 | 40 | 74 | 40 | |
| Parameter | Method | Mean (mm) | Std. dev. (mm) | S-W | S-W crit.val. | Levene | Levene crit. val. | Student’s t Distribution | Student’s t p-Value |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 71.1 | 15 | 0.89 | 0.83 | 3.5 | 4.5 | 1.75 | 0.049 | |
| 2 | 94.5 | 35 | 0.92 | ||||||
| 1 | 69.1 | 21 | 0.95 | 3.2 | 1.80 | 0.046 | |||
| 2 | 95.8 | 37 | 0.93 | ||||||
| 1 | 44.0 | 26 | 0.94 | 0.9 | 1.84 | 0.042 | |||
| 2 | 70.3 | 31 | 0.87 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wójcik, K.; Piekarczyk, M. Machine Learning Methodology in a System Applying the Adaptive Strategy for Teaching Human Motions. Sensors 2020, 20, 314. https://doi.org/10.3390/s20010314
Wójcik K, Piekarczyk M. Machine Learning Methodology in a System Applying the Adaptive Strategy for Teaching Human Motions. Sensors. 2020; 20(1):314. https://doi.org/10.3390/s20010314
Chicago/Turabian StyleWójcik, Krzysztof, and Marcin Piekarczyk. 2020. "Machine Learning Methodology in a System Applying the Adaptive Strategy for Teaching Human Motions" Sensors 20, no. 1: 314. https://doi.org/10.3390/s20010314