IMU-Based Automated Vehicle Slip Angle and Attitude Estimation Aided by Vehicle Dynamics †

Abstract
:1. Introduction
- A novel and autonomous estimation method for slip angle and attitude without aids from external information such as GNSS or lane lines is proposed. The IMU-based slip angle and attitude estimator only needs assistance from VDM-based velocity and attitude estimators. Distinguished from many of the state of the art of slip angle estimation methods, which only consider horizontal motion, to further improve the estimation precision, especially in critical driving conditions, movement, including rotation and translation of the vehicle body in three dimensions, is considered. Simultaneous estimation of attitude and velocity keep the IMU-based estimator in a good state to prepare for open loop integration mode, when the vehicle enters critical driving conditions. An accurate attitude guarantees that the acceleration generated by gravity with changing attitude can be removed correctly. Then even when feedback from the VDM-based estimator is cut off, the estimation results of slip angle and attitude are still accurate for a short time.
- The proposed VDM-based estimator for attitude and velocity could eliminate the accumulated error of IMU-based slip angle and attitude estimation in normal driving conditions. Without accumulated error, the IMU-based slip angle and attitude estimation results have higher precision than the VDM-based estimators.
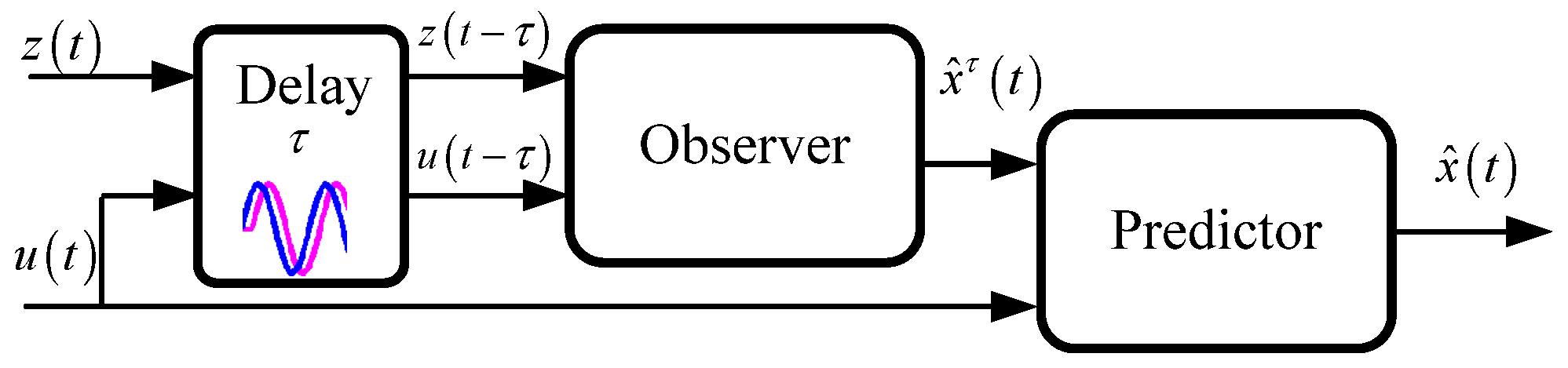
- A delayed estimator and predictor structure is proposed to deal with the time delay in detecting abnormal estimation results from VDM-based estimators. The delayed estimator and predictor structure avoids outlier feedback from the VDM-based estimators for IMU-based slip angle and attitude estimators.
2. Related Work
2.1. Attitude Estimation
2.2. Slip Angle Estimation
3. Methods
3.1. Vehicle-Dynamics-Model-Based Velocity Estimator
3.1.1. Vehicle Kinematic Model
3.1.2. Longitudinal Velocity and Its Acceleration Estimation
3.1.3. Estimation Algorithm
3.1.4. Lateral Velocity and Its Acceleration Estimation
3.2. IMU-Based Attitude Estimation
3.2.1. Gyroscope Sensor Model
3.2.2. Attitude Dynamics
3.2.3. Attitude Estimator
3.3. IMU-Based Velocity Estimation
3.3.1. Accelerometer Sensor Model
3.3.2. Velocity Dynamics
3.3.3. Velocity Estimator
3.4. Attitude and Velocity Predictor
4. Results and Discussion
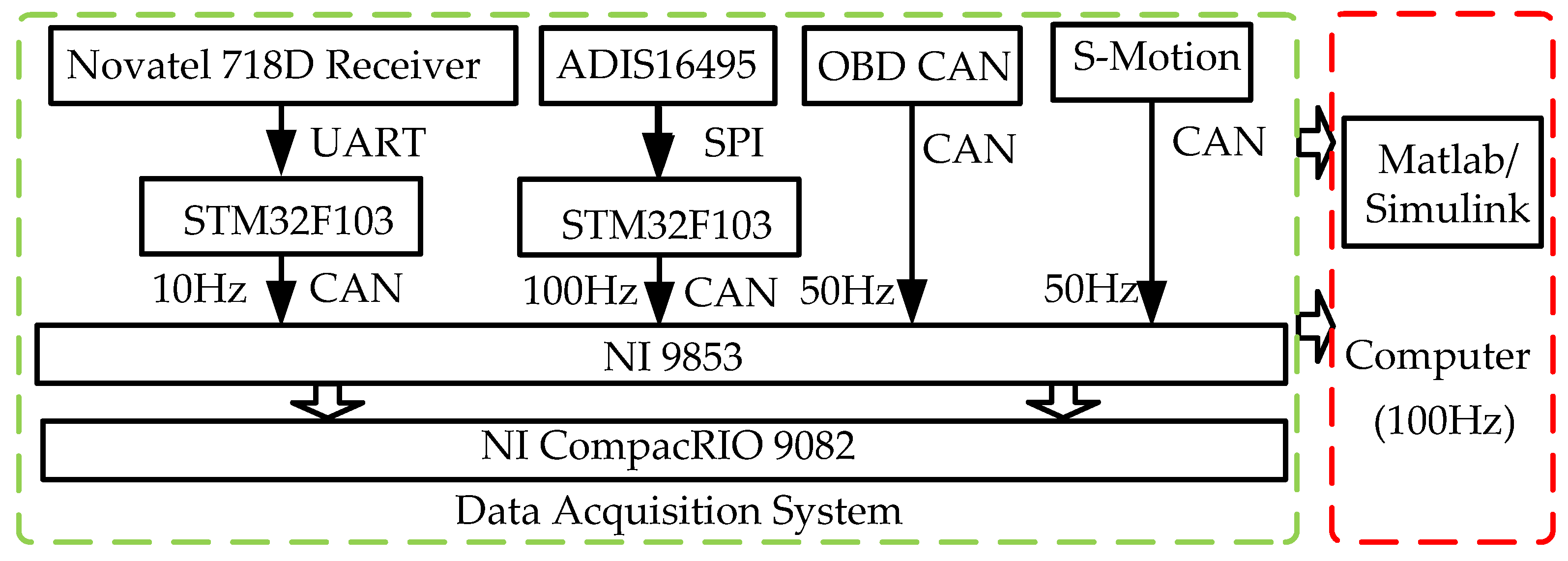
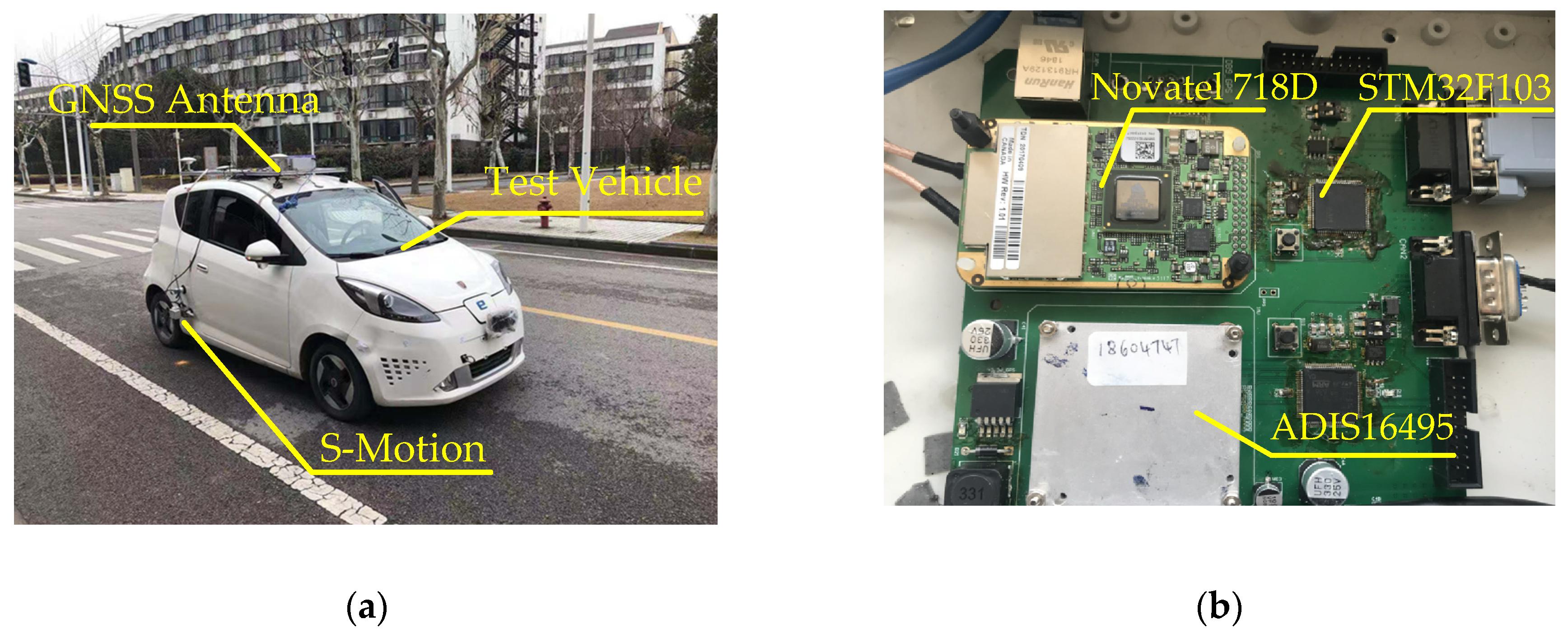
4.1. Experimental Implementation
4.2. Expeimental Results
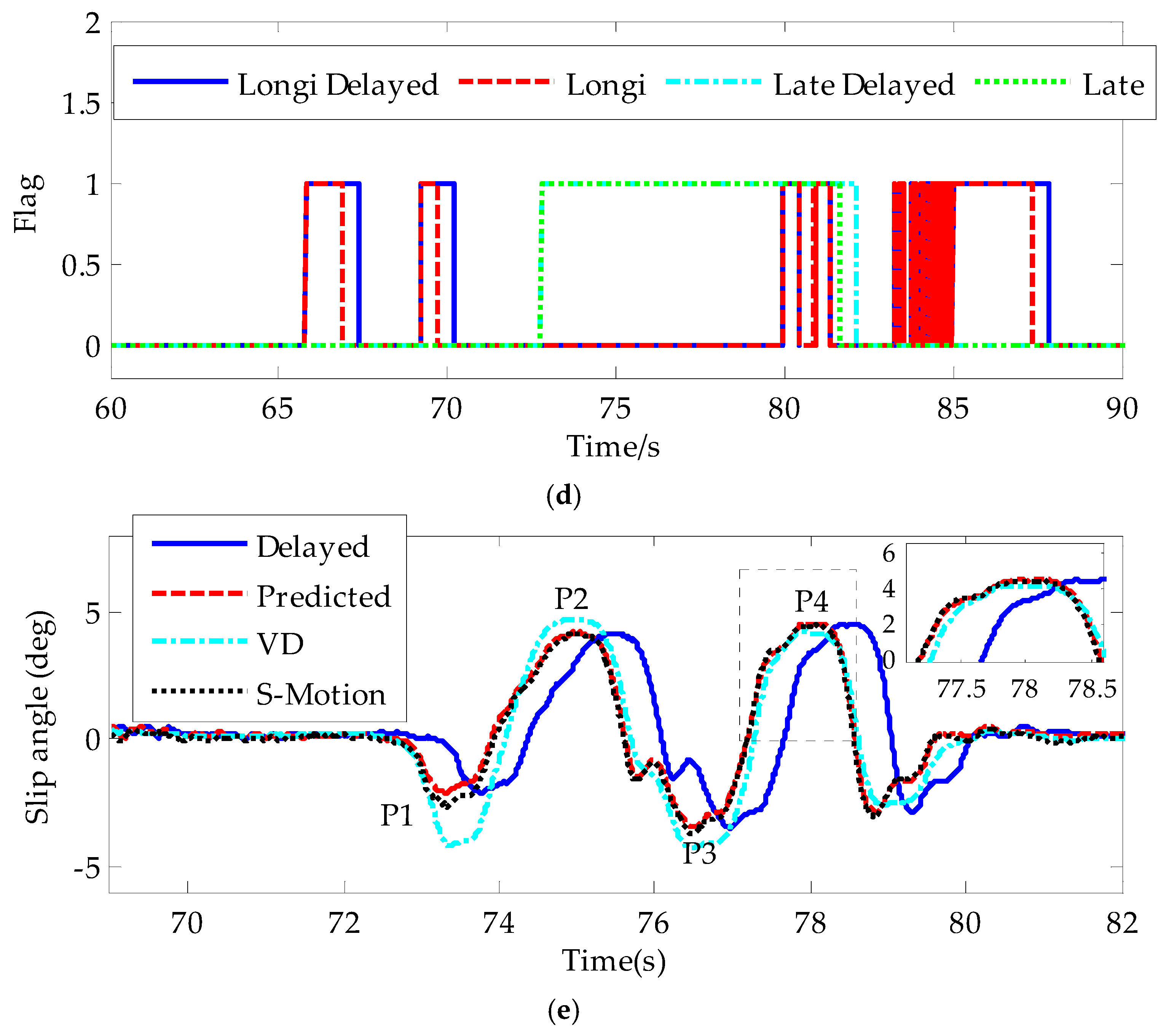
4.2.1. DLC Maneuver
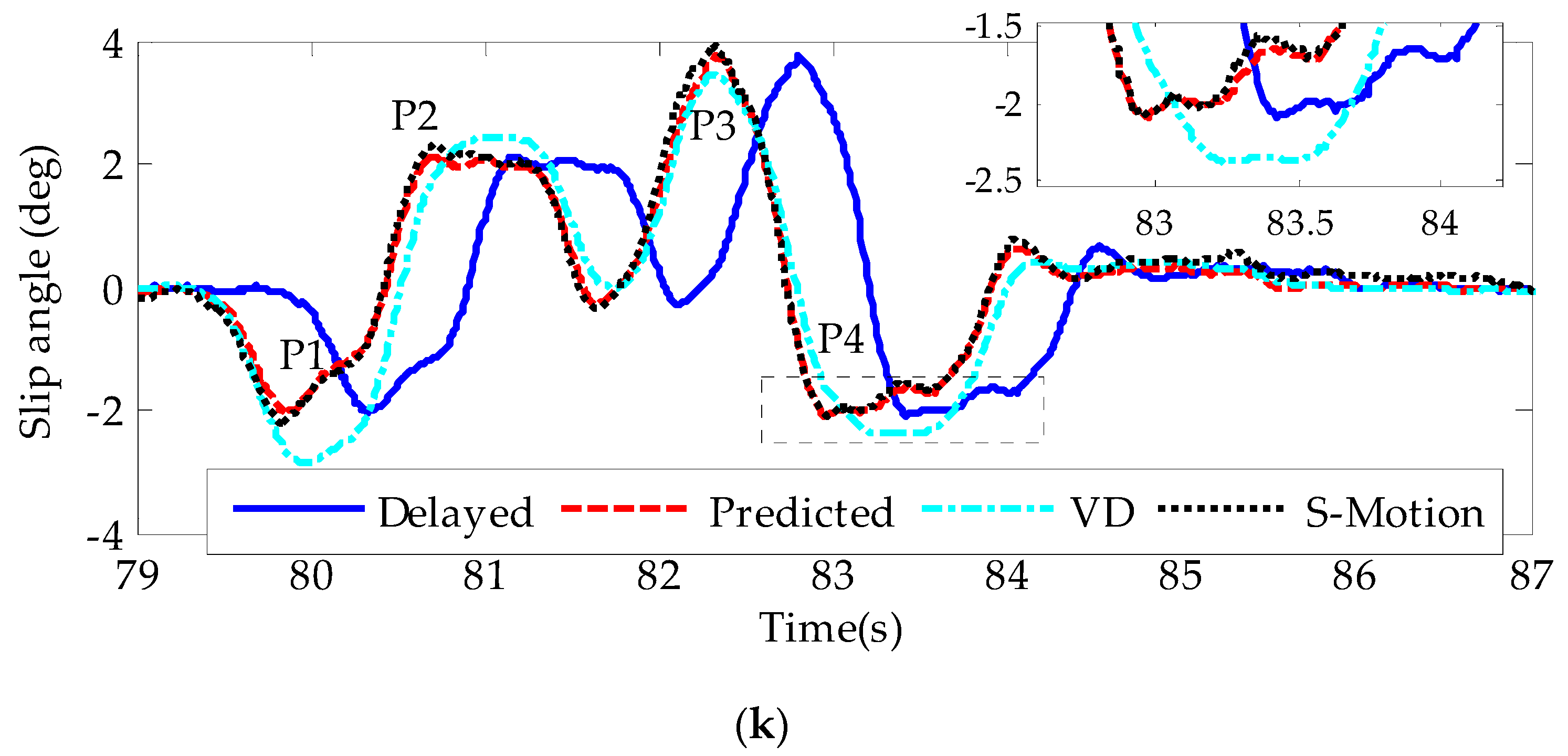
4.2.2. Slalom Maneuver
4.3. Discussion
5. Conclusions
- Better performance has been gained by fusing VDM-based estimators and IMU-based estimators for slip angle and attitude than each of them. On the one hand, under normal driving conditions, assistance from VDM-based estimators can eliminate the accumulated error for the IMU–based slip angle and attitude estimation by the Kalman filter considering the lever arm between the IMU and rotation center. On the other hand, under critical driving conditions, without the accumulated error, the IMU-based slip angle and attitude estimation results have higher precision than the VDM-based estimator results.
- The simultaneous estimation of attitude and velocity keeps the IMU-based estimators in a good state to prepare for the open loop integration mode when the vehicle enters critical driving conditions. An accurate attitude guarantees that the acceleration generated by gravity with changing attitude can be removed correctly. Then, even when the feedback from the VDM-based estimators is cut off, the estimation results of slip angle and attitude are still accurate for a short time.
- The delayed estimator and predictor structure can avoid outlier feedback from VDM-based velocity and attitude estimators for IMU-based slip angle and attitude estimators with rejecting the time delay in detecting abnormal estimation results from VDM-based estimators. Also, the estimation error of the delayed estimator and predictor structure has been proved convergence theoretically.
Author Contributions
Funding
Conflicts of Interest
Appendix A
- The estimation error of is bounded.
- The system is Lipschitz with respect to x, which means there exists a positive constant such that for any and and any , where means Euclidean norm on .
- The delayed time is smaller than and there exists such that:
References
- Lv, C.; Hu, X.; Sangiovanni-Vincentelli, A.; Li, Y.; Martinez, C.M.; Cao, D. Driving-style-based co-design optimization of an automated electric vehicle: A cyber-physical system approach. IEEE Trans. Ind. Electron. 2018, 66, 2965–2975. [Google Scholar] [CrossRef]
- Woo, R.; Yang, E.J.; Seo, D.W. A fuzzy-innovation-based adaptive kalman filter for enhanced Vehicle positioning in dense urban environments. Sensors 2019, 19, 1142. [Google Scholar] [CrossRef] [PubMed]
- Xing, Y.; Lv, C.; Wang, H.; Cao, D.; Velenis, E. Dynamic integration and online evaluation of vision-based lane detection algorithms. IET Intell. Transp. Syst. 2019, 13, 55–62. [Google Scholar] [CrossRef]
- Han, J.; Heo, O.; Park, M.; Kee, S.; Sunwoo, M. Vehicle distance estimation using a mono-camera for FCW/AEB systems. Int. J. Automot. Technol. 2016, 17, 483–491. [Google Scholar] [CrossRef]
- Cheng, S.; Li, L.; Chen, J. Fusion algorithm design based on adaptive SCKF and integral correction for side-slip angle observation. IEEE Trans. Ind. Electron. 2017, 65, 5754–5763. [Google Scholar] [CrossRef]
- Chen, J.; Song, J.; Li, L.; Gang, J.; Ran, X.; Cai, Y. UKF-based adaptive variable structure observer for vehicle sideslip with dynamic correction. IET Control Theory Appl. 2016, 10, 1641–1652. [Google Scholar] [CrossRef]
- RT3000. Available online: https://www.oxts.com/products/rt3000 (accessed on 5 April 2019).
- Correvit S-Motion: 2-Axis Optical Sensors. Available online: https://www.kistler.com/en/product/type-csmota/?application=13 (accessed on 5 April 2019).
- Ahmed, H.; Tahir, M. Accurate attitude estimation of a moving land vehicle using low-cost MEMS IMU sensors. IEEE Intell. Transp. Syst. 2017, 18, 1723–1739. [Google Scholar] [CrossRef]
- Wu, Z.; Yao, M.; Ma, H.; Jia, W. Improving accuracy of the vehicle attitude estimation for low-cost INS/GPS integration aided by the GPS-measured course angle. IEEE Intell. Transp. Syst. 2013, 14, 553–564. [Google Scholar] [CrossRef]
- Wang, Y.; Nguyen, M.B.; Fujimoto, H.; Hori, Y. Multirate estimation and control of body slip angle for electric vehicles based on onboard vision system. IEEE Trans. Ind. Electron. 2014, 61, 1133–1143. [Google Scholar] [CrossRef]
- Yoon, J.H.; Peng, H. A cost-effective sideslip estimation method using velocity measurements from two GPS receivers. IEEE Trans. Veh. Technol. 2014, 63, 2589–2599. [Google Scholar] [CrossRef]
- Li, L.; Jia, G.; Ran, X.; Song, J.; Wu, K. A variable structure extended Kalman filter for vehicle sideslip angle estimation on a low friction road. Veh. Syst. Dyn. 2014, 52, 280–308. [Google Scholar] [CrossRef]
- Oh, J.J.; Choi, B.S. Vehicle velocity observer design using 6-D IMU and multiple-observer approach. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1865–1879. [Google Scholar] [CrossRef]
- Xia, X.; Xiong, L.; Liu, W.; Yu, Z. Automated vehicle attitude and lateral velocity estimation using a 6-D IMU aided by vehicle dynamics. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium, Changshu, China, 26–30 June 2018. [Google Scholar]
- Savage, P.G. Strapdown inertial navigation integration algorithm design Part 1: Attitude algorithms. J. Guid. Control Dyn. 1998, 21, 19–28. [Google Scholar] [CrossRef]
- Zhu, R.; Sun, D.; Zhou, Z.; Wang, D. A linear fusion algorithm for attitude determination using low cost MEMS-based sensors. Measurement 2007, 40, 322–328. [Google Scholar] [CrossRef]
- Rehbinder, H.; Hu, X. Drift-free attitude estimation for accelerated rigid bodies. Automatica 2004, 40, 653–659. [Google Scholar] [CrossRef] [Green Version]
- Suh, Y.S. Orientation estimation using a quaternion-based indirect Kalman filter with adaptive estimation of external acceleration. IEEE Trans. Instrum. Meas. 2010, 59, 3296–3305. [Google Scholar] [CrossRef]
- Yoon, J.H.; Peng, H. Robust vehicle sideslip angle estimation through a disturbance rejection filter that integrates a magnetometer with GPS. IEEE Trans. Intell. Transp. Syst. 2014, 15, 191–204. [Google Scholar] [CrossRef]
- Liu, Y.; Fan, X.; Lv, C.; Wu, J.; Li, L.; Ding, D. An innovative information fusion method with adaptive Kalman filter for integrated INS/GPS navigation of autonomous vehicles. Mech. Syst. Signal Process. 2017, 100, 605–616. [Google Scholar] [CrossRef]
- Hansen, J.M.; Fossen, T.I.; Johansen, T.A. Nonlinear observer design for GNSS-aided inertial navigation systems with time-delayed GNSS measurements. Control Eng. Pract. 2017, 60, 39–50. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, H.; Fan, Y. Attitude estimation method for flight vehicles based on computer vision. J. Beijing Univ. Aeronaut. Astronaut. 2006, 32, 885. [Google Scholar]
- Chung, T.; Yi, K. Design and evaluation of side slip angle-based vehicle stability control scheme on a virtual test track. IEEE Trans. Control Syst. Technol. 2006, 14, 224–234. [Google Scholar] [CrossRef]
- Bevly, D.M.; Ryu, J.; Gerdes, J.C. Integrating INS sensors with GPS measurements for continuous estimation of vehicle sideslip, roll, and tire cornering stiffness. IEEE Trans. Intell. Transp. Syst. 2006, 7, 483–493. [Google Scholar] [CrossRef]
- Matsui, T.; Suganuma, N.; Fujiwara, N. Measurement of vehicle sideslip angle using stereovision. Trans. Jpn. Soc. Mech. Eng. C 2005, 71, 3202–3207. [Google Scholar] [CrossRef]
- Gao, X.; Yu, Z.; Wiedemann, J. Sideslip angle estimation based on input–output linearisation with tire–road friction adaptation. Veh. Syst. Dyn. 2010, 48, 217–234. [Google Scholar] [CrossRef]
- Leung, K.T.; Whidnorne, J.F.; Purdy, D.; Dunpyer, A. A review of ground vehicle dynamic state estimations utilising GPS/INS. Veh. Syst. Dyn. 2011, 49, 29–58. [Google Scholar] [CrossRef]
- Piyabongkarn, D.; Rajamani, R.; Grogg, J.A.; Lew, J.Y. Development and experimental evaluation of a slip angle estimator for vehicle stability control. IEEE Trans. Control Syst. Technol. 2009, 17, 78–88. [Google Scholar] [CrossRef]
- Ding, W.; Wang, J.; Rizos, C.; Rizos, C. Improving adaptive Kalman estimation in GPS/INS integration. J. Navig. 2007, 60, 517. [Google Scholar] [CrossRef]
- Xia, X.; Xiong, L.; Hou, Y.; Teng, G.; Yu, Z. Vehicle stability control based on driver’s emergency alignment intention recognition. Int. J. Automot. Technol. 2017, 18, 993–1006. [Google Scholar]
- Vaccaro, R.J.; Zaki, A.S. Statistical modeling of rate gyros. IEEE Trans. Instrum. Meas. 2012, 61, 673–684. [Google Scholar] [CrossRef]
- Khosravian, A.; Trumpf, J.; Mahony, R. State estimation for nonlinear systems with delayed output measurements. In Proceedings of the 54th IEEE Conference on Decision & Control, Osaka, Japan, 15–18 December 2015. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Proposed Method | Vehicle Dynamics | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| P1 | P2 | P3 | P4 | Ave | P1 | P2 | P3 | P4 | Ave | |
| Roll angle (deg) | 0.05 | 0.04 | 0.02 | 0.1 | 0.05 | – | – | – | – | – |
| Pitch angle (deg) | 0.05 | 0.26 | 0.2 | 0.25 | 0.19 | – | – | – | – | – |
| Longi velocity (m/s) | 0.11 | 0.02 | 0.06 | 0.15 | 0.09 | 0.05 | 0.08 | 0.01 | 0.02 | 0.04 |
| Slip angle (deg) | 0.01 | 0.21 | 0.15 | 0.02 | 0.10 | 0.91 | 0.65 | 0.42 | 0.45 | 0.61 |
| Proposed Method | Vehicle Dynamics | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| P1 | P2 | P3 | P4 | Ave | P1 | P2 | P3 | P4 | Ave | |
| Roll angle (deg) | 0.09 | 0.01 | 0.02 | 0.07 | 0.05 | – | – | – | – | – |
| Pitch angle (deg) | 0.05 | 0.14 | 0.09 | 0.43 | 0.18 | – | – | – | – | – |
| Longi velocity (m/s) | 0.08 | 0.02 | 0.04 | 0.13 | 0.07 | 0.04 | 0.07 | 0.07 | 0.03 | 0.05 |
| Slip angle (deg) | 0.5 | 0.05 | 0.25 | 0.14 | 0.24 | 1.48 | 0.58 | 0.51 | 0.17 | 0.69 |
| Proposed Method | Vehicle Dynamics | |
|---|---|---|
| Roll angle (deg) | 0.114 | – |
| Pitch angle (deg) | 0.168 | – |
| Longi velocity (m/s) | 0.054 | 0.032 |
| Slip angle (deg) | 0.069 | 0.176 |
| Proposed Method | Vehicle Dynamics | |
|---|---|---|
| Roll angle (deg) | 0.089 | – |
| Pitch angle (deg) | 0.181 | – |
| Longi velocity (m/s) | 0.05 | 0.03 |
| Slip angle (deg) | 0.100 | 0.291 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, L.; Xia, X.; Lu, Y.; Liu, W.; Gao, L.; Song, S.; Han, Y.; Yu, Z. IMU-Based Automated Vehicle Slip Angle and Attitude Estimation Aided by Vehicle Dynamics. Sensors 2019, 19, 1930. https://doi.org/10.3390/s19081930
Xiong L, Xia X, Lu Y, Liu W, Gao L, Song S, Han Y, Yu Z. IMU-Based Automated Vehicle Slip Angle and Attitude Estimation Aided by Vehicle Dynamics. Sensors. 2019; 19(8):1930. https://doi.org/10.3390/s19081930
Chicago/Turabian StyleXiong, Lu, Xin Xia, Yishi Lu, Wei Liu, Letian Gao, Shunhui Song, Yanqun Han, and Zhuoping Yu. 2019. "IMU-Based Automated Vehicle Slip Angle and Attitude Estimation Aided by Vehicle Dynamics" Sensors 19, no. 8: 1930. https://doi.org/10.3390/s19081930