A Novel Racing Array Transducer for Noninvasive Ultrasonic Retinal Stimulation: A Simulation Study

Abstract
:1. Introduction
2. Method
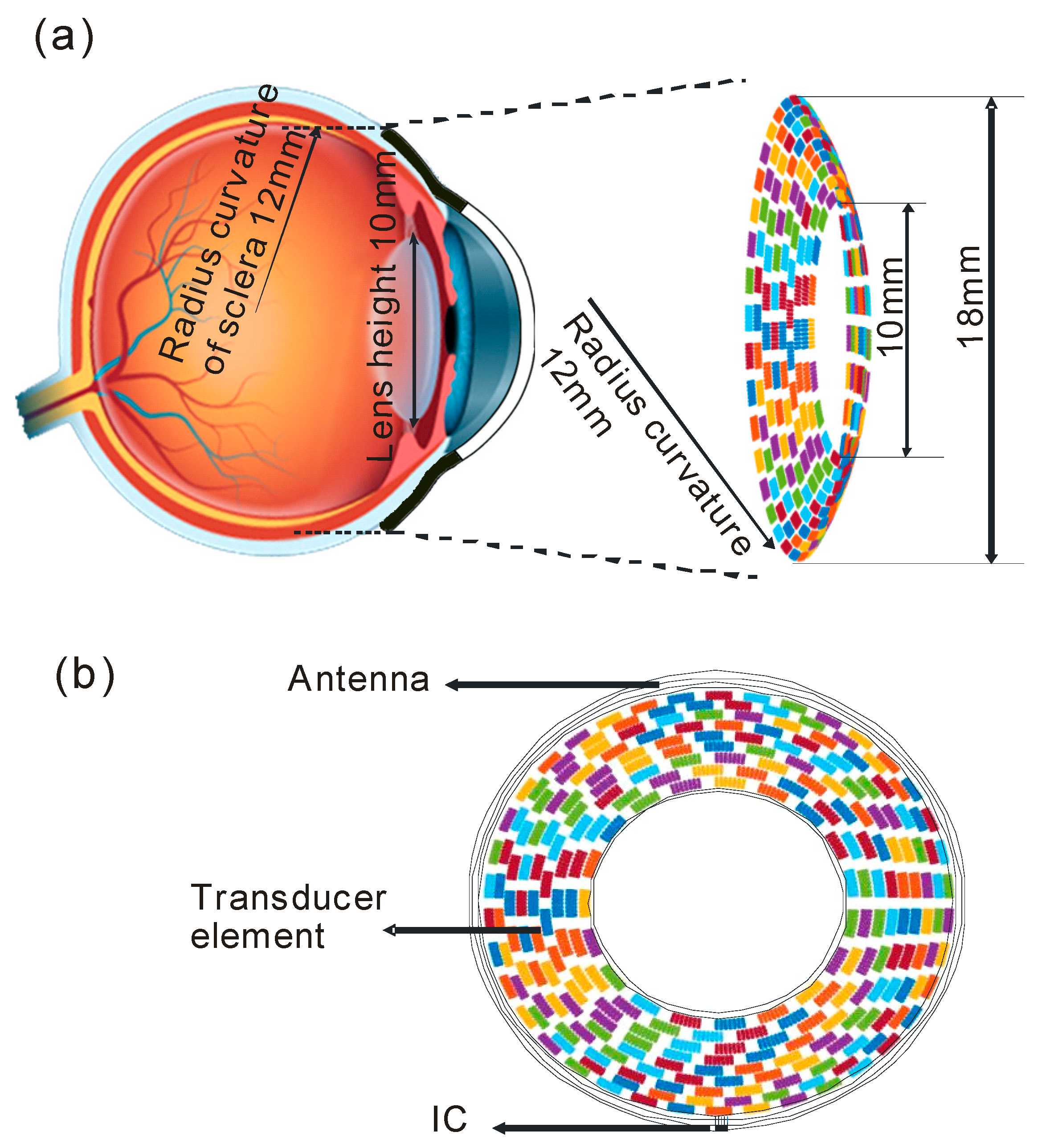
2.1. Design of Array Transducer
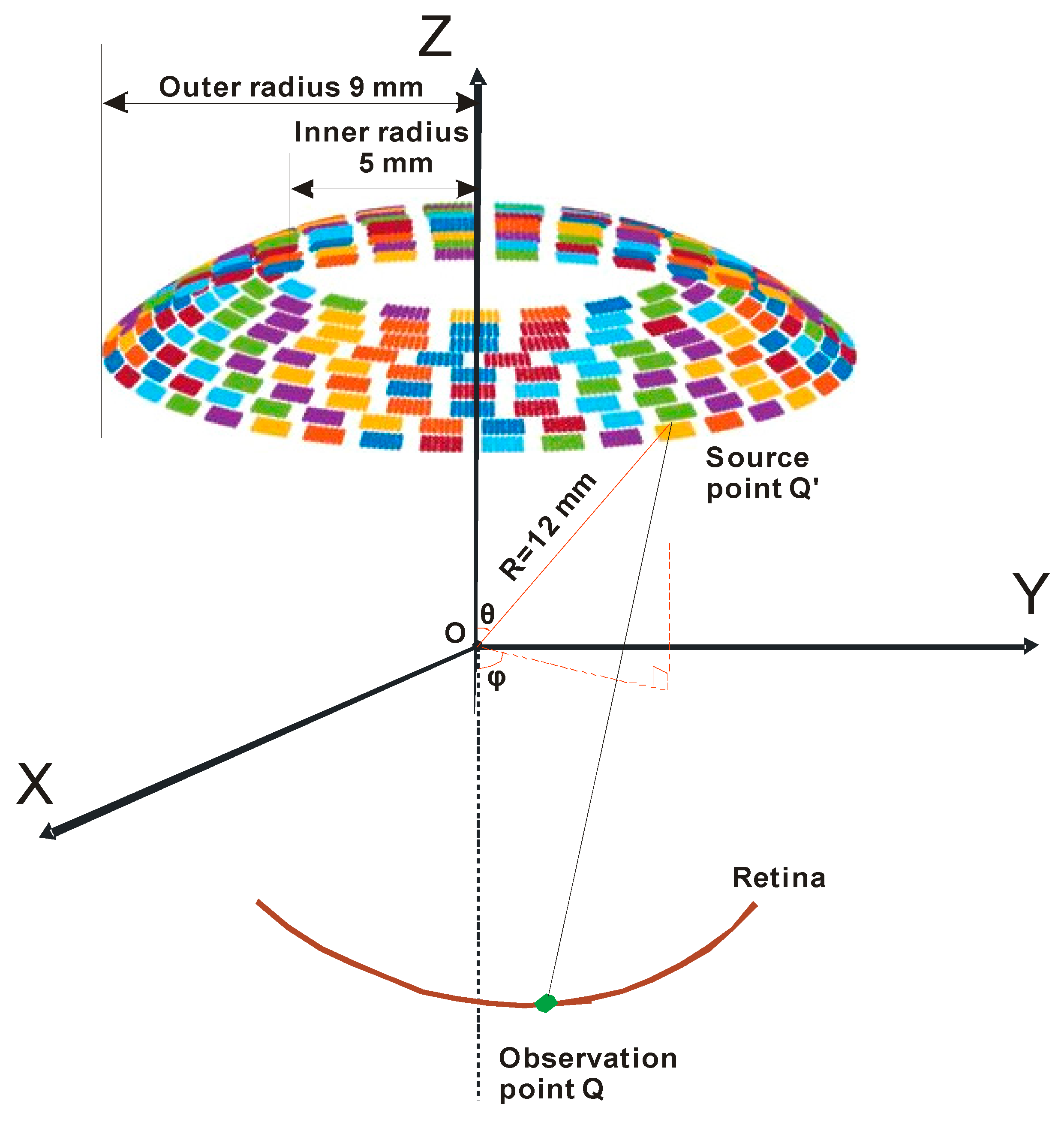
2.2. Simulation Setup
2.3. Acoustic Field Computation
3. Results
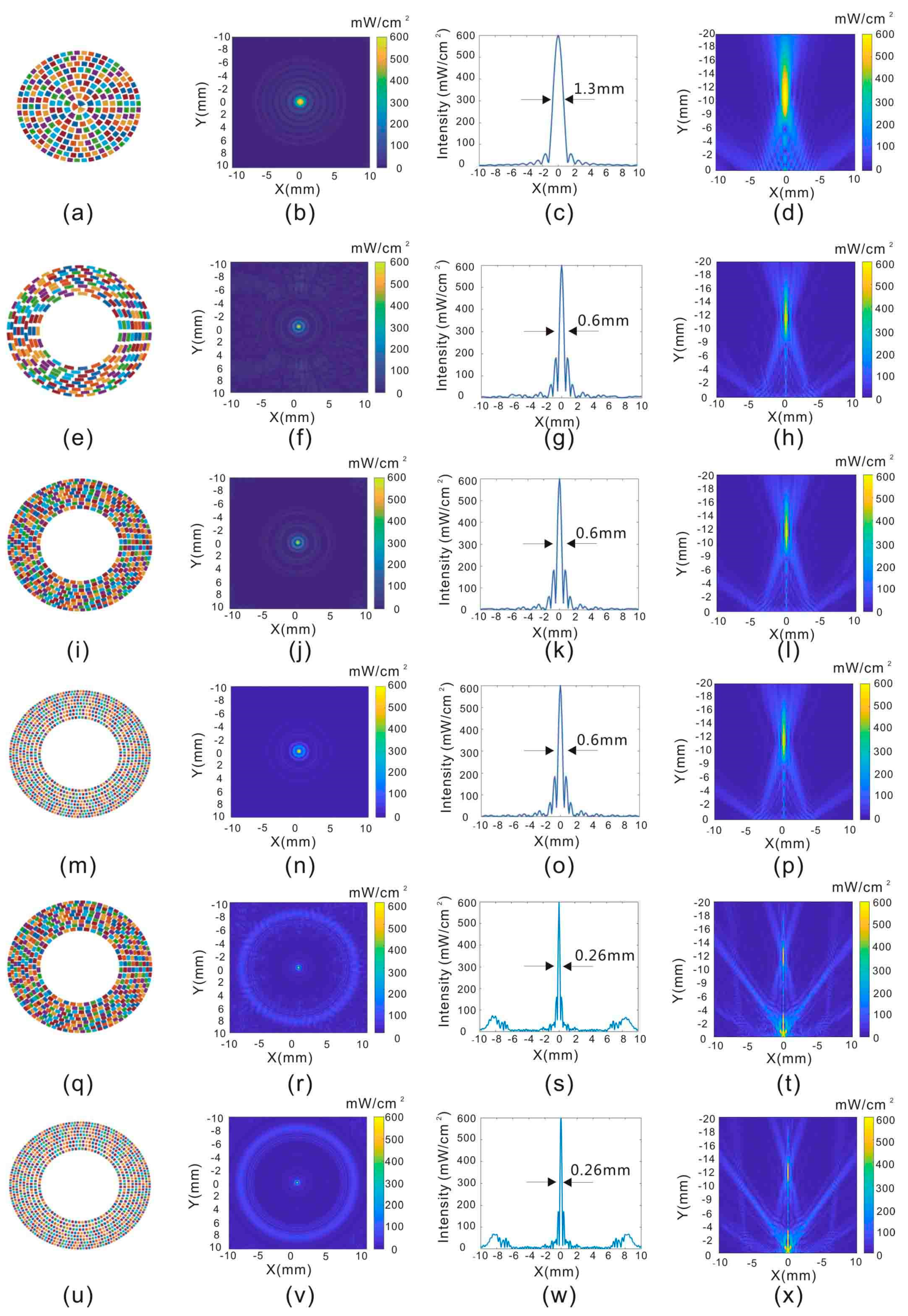
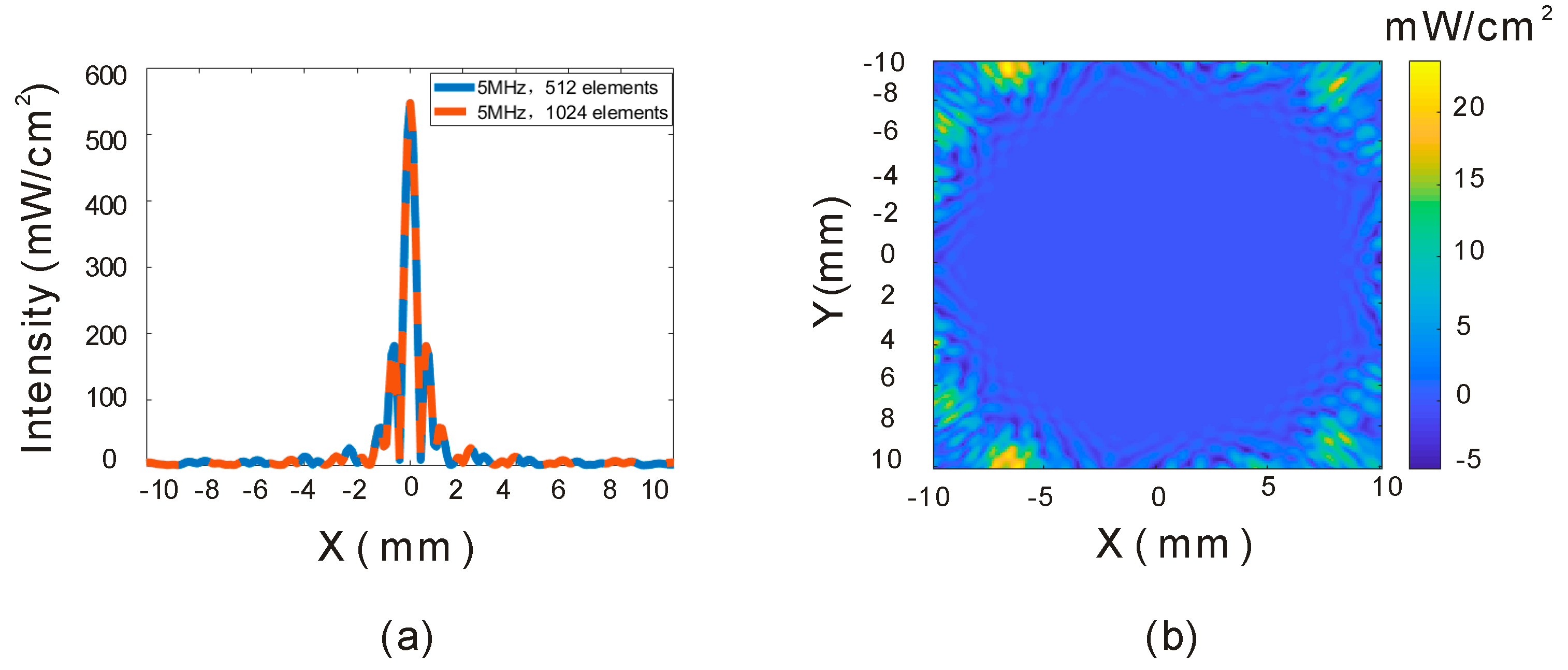
3.1. Resolution by Different Ultrasonic Frequencies
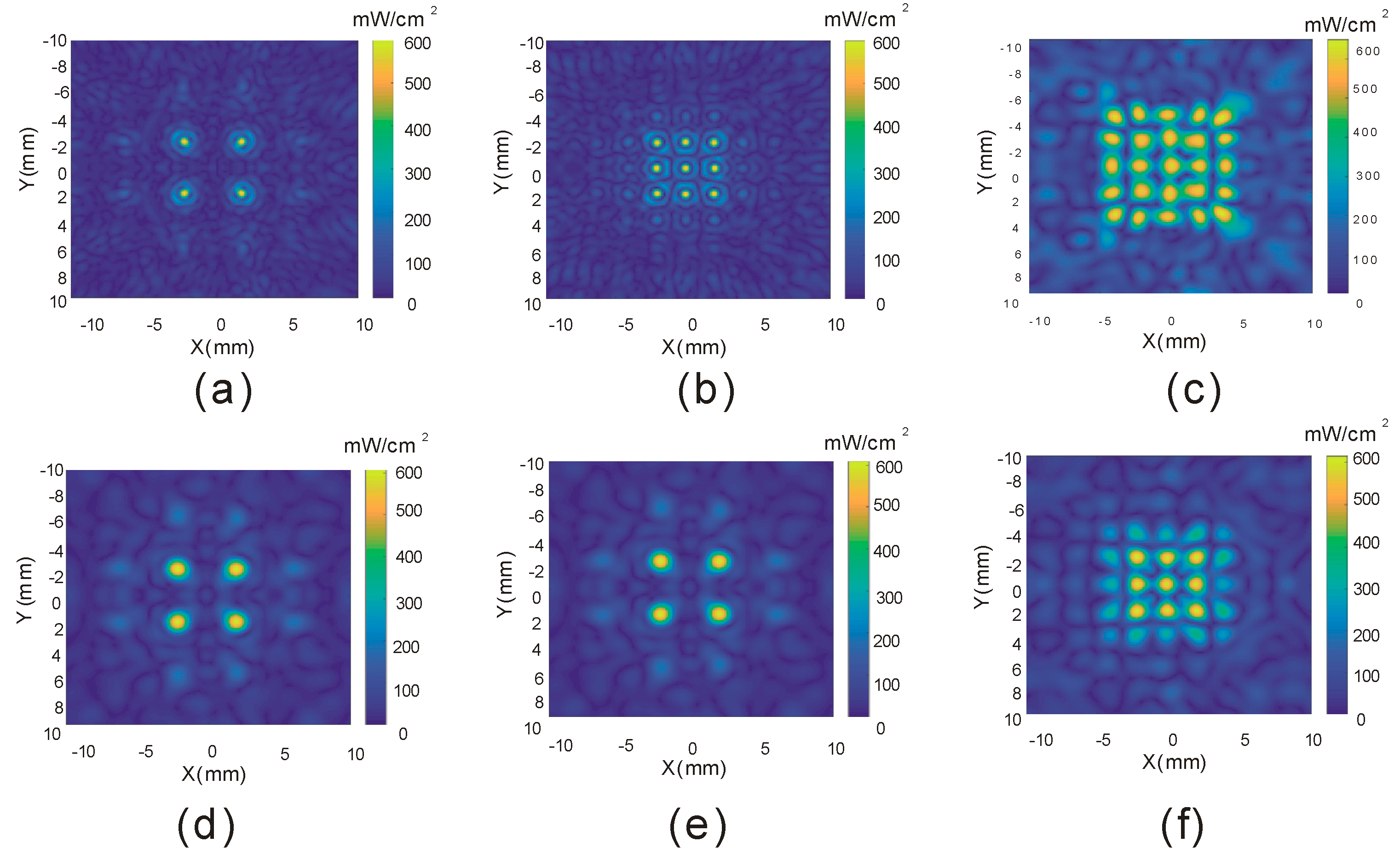
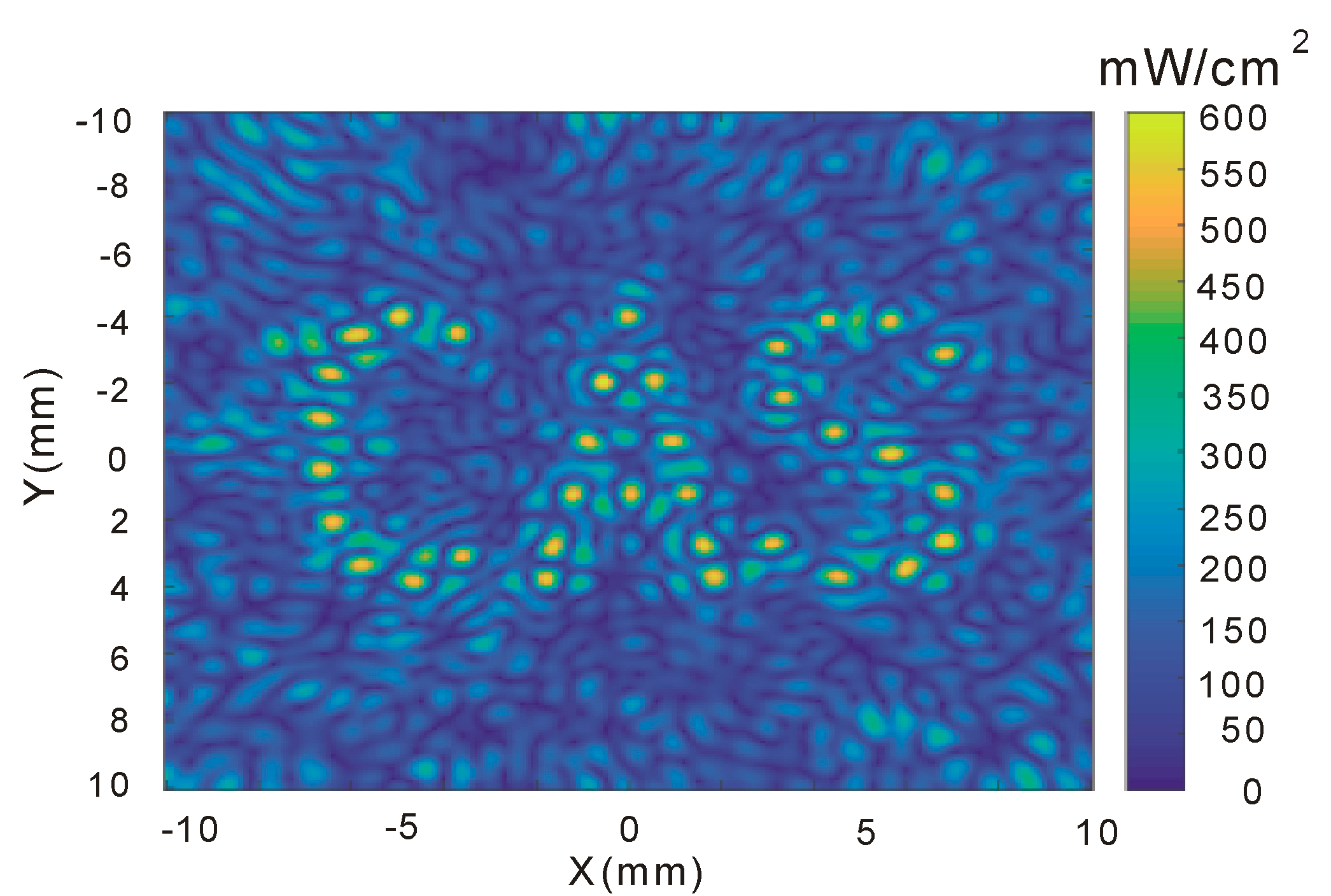
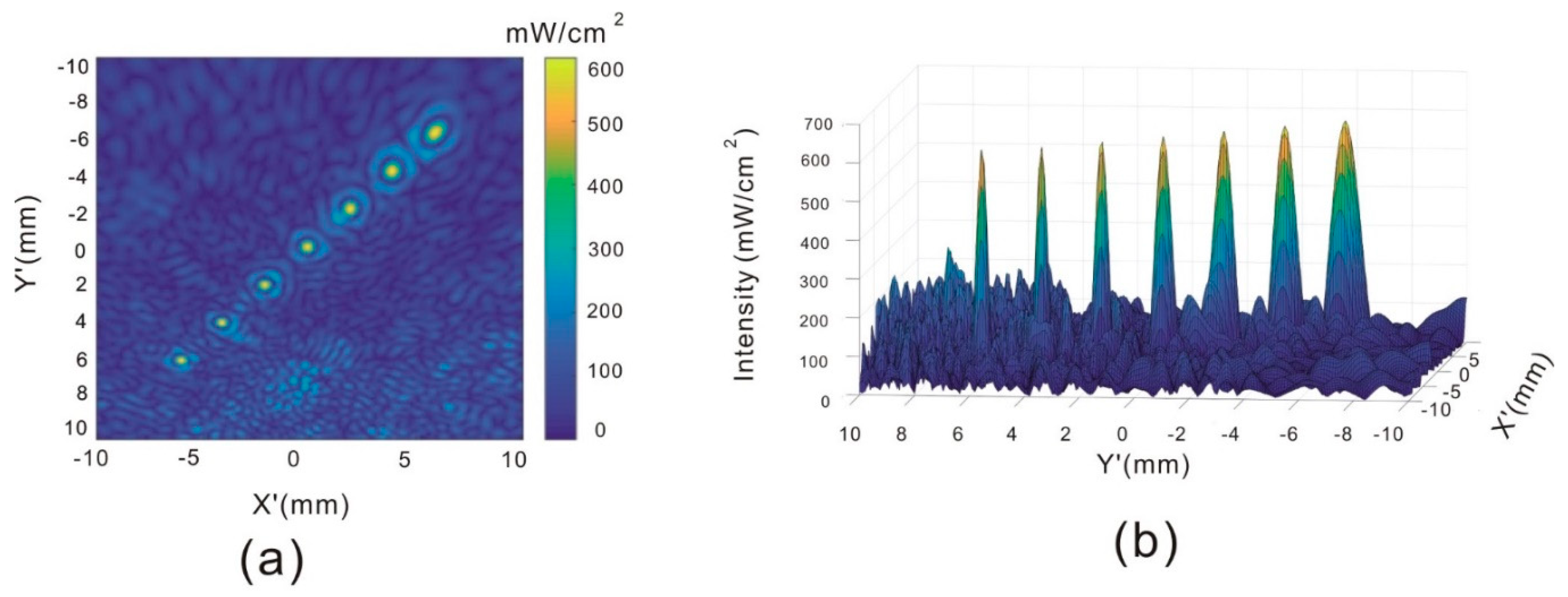
3.2. Construction of Multiple Focal Points
3.3. Patterns at Different Depths
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Humayun, M.S.; Weiland, J.D.; Fujii, G.Y.; Greenberg, R.; Williamson, R.; Little, J.; Mech, B.; Cimmarusti, V.; Van Boemel, G.; Dagnelie, G.; et al. Visual perception in a blind subject with a chronic microelectronic retinal prosthesis. Vis. Res. 2003, 43, 2573–2581. [Google Scholar] [CrossRef] [Green Version]
- Weiland, J.D.; Liu, W.; Humayun, M.S. Retinal prosthesis. Annu. Rev. Biomed. Eng. 2005, 7, 361–401. [Google Scholar] [CrossRef]
- Guenther, T.; Lovell, N.H.; Suaning, G.J. Bionic vision: System architectures—A review. Expert Rev. Med. Devices 2012, 9, 33–48. [Google Scholar] [CrossRef]
- Weiland, J.D.; Humayun, M.S. Retinal prosthesis. IEEE Trans. Biom. Eng. 2014, 61, 1412–1424. [Google Scholar] [CrossRef]
- Winter, J.O.; Cogan, S.F.; Rizzo, J.F. Retinal prosthesis: Current challenges and future outlook. J. Biomater. Sci. Polym. Ed. 2014, 18, 1031–1055. [Google Scholar] [CrossRef]
- Wagner, T.; Valero-Cabre, A.; Pascual-Leone, A. Noninvasive human brain stimulation. Annu. Rev. Biomed. Eng. 2007, 9, 527–565. [Google Scholar] [CrossRef]
- Hynynen, K.; Jones, R.M. Image-guided ultrasound phased arrays are a disruptive technology for non-invasive therapy. Phys. Med. Biol. 2016, 61, R206–R248. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ye, J.; Tang, S.; Meng, L.; Li, X.; Wen, X.; Chen, S.; Niu, L.; Li, X.; Qiu, W.; Hu, H.; et al. Ultrasonic Control of Neural Activity through Activation of the Mechanosensitive Channel MscL. Nano Lett. 2018, 18, 4148–4155. [Google Scholar] [CrossRef] [PubMed]
- Tufail, Y.; Yoshihiro, A.; Pati, S.; Li, M.M.; Tyler, W.J. Ultrasonic neuromodulation by brain stimulation with transcranial ultrasound. Nat. Protoc. 2011, 6, 1453–1470. [Google Scholar] [CrossRef] [PubMed]
- Tufail, Y.; Matyushov, A.; Baldwin, N.; Tauchmann, M.L.; Georges, J.; Yoshihiro, A.; Tillery, S.I.; Tyler, W.J. Transcranial pulsed ultrasound stimulates intact brain circuits. Neuron 2010, 66, 681–694. [Google Scholar] [CrossRef]
- Li, G.; Qiu, W.; Zhang, Z.; Jiang, Q.; Su, M.; Cai, R.; Li, Y.; Cai, F.; Deng, Z.; Xu, D.; et al. Noninvasive ultrasonic neuromodulation in freely moving mice. IEEE Trans. Biomed. Eng. 2019, 66, 217–224. [Google Scholar] [CrossRef]
- Chaplin, V. Marshal A Phipps and Charles F Caskey, A random phased-array for MR-guided transcranial ultrasound neuromodulation in non-human primates. Phys. Med. Biol. 2018, 63, 105016. [Google Scholar] [CrossRef]
- Lee, W.; Kim, H.; Jung, Y.; Song, I.; Chung, Y.A.; Yoo, S. Image-Guided Transcranial Focused Ultrasound Stimulates Human Primary Somatosensory Cortex. Sci. Rep. 2015, 5, 8743. [Google Scholar] [CrossRef] [Green Version]
- Naor, O.; Hertzberg, Y.; Zemel, E.; Kimmel, E.; Shoham, S. Towards multifocal ultrasonic neural stimulation II: Design considerations for an acoustic retinal prosthesis. J. Neural Eng. 2012, 9, 026006. [Google Scholar] [CrossRef]
- Menz, M.D.; Oralkan, Ö.; Khuri-Yakub, P.T.; Baccus, S.A. Precise neural stimulation in the retina using focused ultrasound. J. Neurosci. 2013, 33, 4550–4560. [Google Scholar] [CrossRef]
- Jiang, Q.; Li, G.; Zhao, H.; Sheng, W.; Yue, L.; Su, M.; Weng, S.; Chan, L.; Zhou, Q.; Humayun, M.S.; et al. Temporal neuromodulation of retinal ganglion cells by low-frequency focused ultrasound stimulation. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 969–976. [Google Scholar] [CrossRef]
- Li, G.; Qiu, W.; Hong, J.; Jiang, Q.; Su, M.; Mu, P.; Yang, G.; Li, Y.; Wang, C.; Zhang, H.; et al. Imaging-guided dual-target neuromodulation of the mouse brain using array ultrasound. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2018, 65, 1583–1589. [Google Scholar] [CrossRef]
- Gao, M.; Yu, Y.; Zhao, H.; Li, G.; Jiang, H.; Wang, C.; Cai, F.; Chan, L.; Chiu, B.; Qian, W.; et al. A simulation study of ultrasonic retinal prosthesis with a novel contact-lens array for non-invasive retinal stimulation. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1605–1611. [Google Scholar] [CrossRef]
- Azhari, H. Basics of Biomedical Ultrasound for Engineers; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Bekerman, I.; Gottlieb, P.; Vaiman, M. 2014 Variations in eyeball diameters of the healthy adults. J. Ophthalmol. 2014, 2014, 503645. [Google Scholar]
- Ebbini, E.S.; Cain, C.A. Multiple-focus ultrasound phased-array pattern synthesis: Optimal driving-signal distributions for hyperthermia. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1989, 36, 540–548. [Google Scholar] [CrossRef]
- Leon, S. Linear Algebru wirh Applications, 2nd ed.; Macmillan: New York, NY, USA, 1980. [Google Scholar]
- Cai, F.; Meng, L.; Jiang, C.; Pan, Y.; Zheng, H. Computation of the acoustic radiation force using the finite-difference time-domain method. J. Acoust. Soc. Am. 2010, 128, 1617–1622. [Google Scholar] [CrossRef]
- Li, G.; Zhao, H.; Zhou, H.; Yan, F.; Wang, Y.; Xu, C.; Wang, C.; Niu, L.; Meng, L.; Wu, S.; et al. Improved anatomical specificity of non-invasive neuro-stimulation by high frequency (5 MHz) ultrasound. Sci. Rep. 2016, 6, 24738. [Google Scholar] [CrossRef]
- Duck, F.A. Medical and non-medical protection standards for ultrasound and infrasound. Prog. Biophys. Mol. Biol. 2007, 93, 176–191. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency (MHz) | Element Number | Element Size (mm × mm) | Inner Diameter (mm) | Outer Diameter (mm) | |
|---|---|---|---|---|---|
| Type (a) | 2.5 | 256 | 0.61 × 0.58 | 0 | 14 |
| Type (e) | 5 | 256 | 0.28 × 0.94 | 10 | 18 |
| Type (i) | 5 | 512 | 0.37 × 0.50 | 10 | 18 |
| Type (m) | 5 | 1024 | 0.22 × 0.30 | 10 | 18 |
| Type (q) | 10 | 512 | 0.37 × 0.50 | 10 | 18 |
| Type (u) | 10 | 1024 | 0.22 × 0.30 | 10 | 18 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Zhang, Z.; Cai, F.; Su, M.; Jiang, Q.; Zhou, Q.; Humayun, M.S.; Qiu, W.; Zheng, H. A Novel Racing Array Transducer for Noninvasive Ultrasonic Retinal Stimulation: A Simulation Study. Sensors 2019, 19, 1825. https://doi.org/10.3390/s19081825
Yu Y, Zhang Z, Cai F, Su M, Jiang Q, Zhou Q, Humayun MS, Qiu W, Zheng H. A Novel Racing Array Transducer for Noninvasive Ultrasonic Retinal Stimulation: A Simulation Study. Sensors. 2019; 19(8):1825. https://doi.org/10.3390/s19081825
Chicago/Turabian StyleYu, Yanyan, Zhiqiang Zhang, Feiyan Cai, Min Su, Qiuju Jiang, Qifa Zhou, Mark S. Humayun, Weibao Qiu, and Hairong Zheng. 2019. "A Novel Racing Array Transducer for Noninvasive Ultrasonic Retinal Stimulation: A Simulation Study" Sensors 19, no. 8: 1825. https://doi.org/10.3390/s19081825