Design, Fabrication, and Evaluation of Multifocal Point Transducer for High-Frequency Ultrasound Applications


 ,
,
Abstract
:1. Introduction
2. Design and Fabrication of Multifocal Point Transducers
2.1. Materials
2.2. Transducer Design
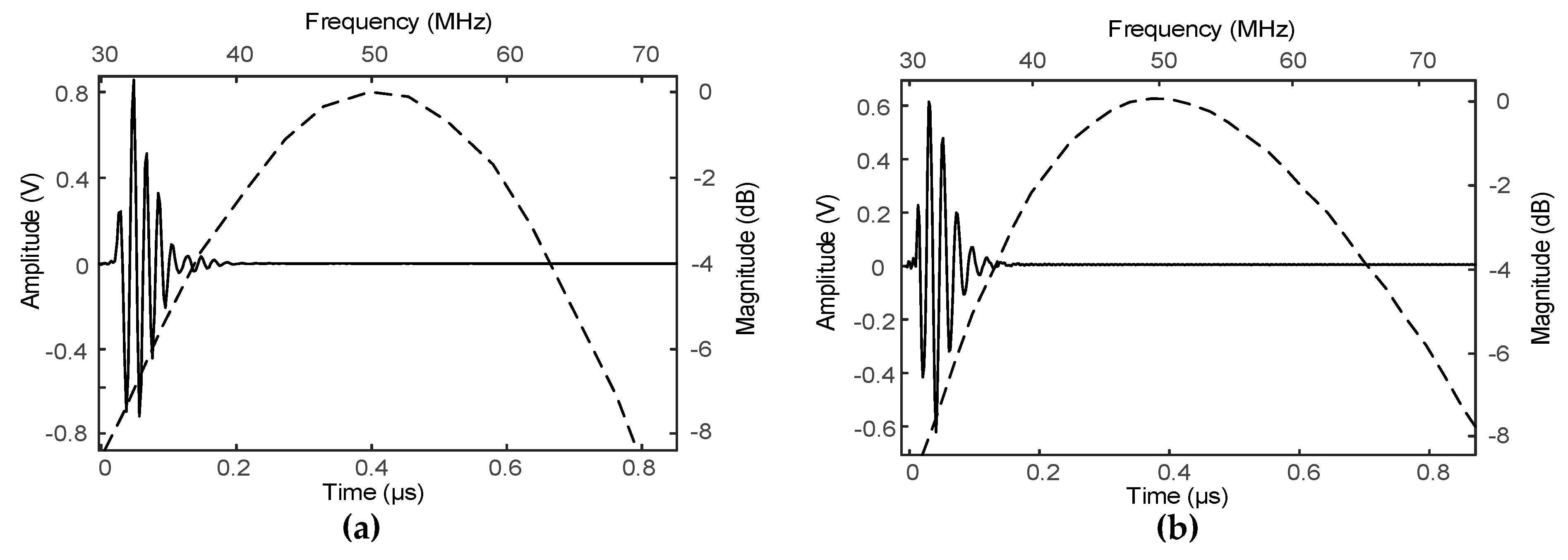
2.2.1. Pulse-Echo and Frequency Spectra Simulation
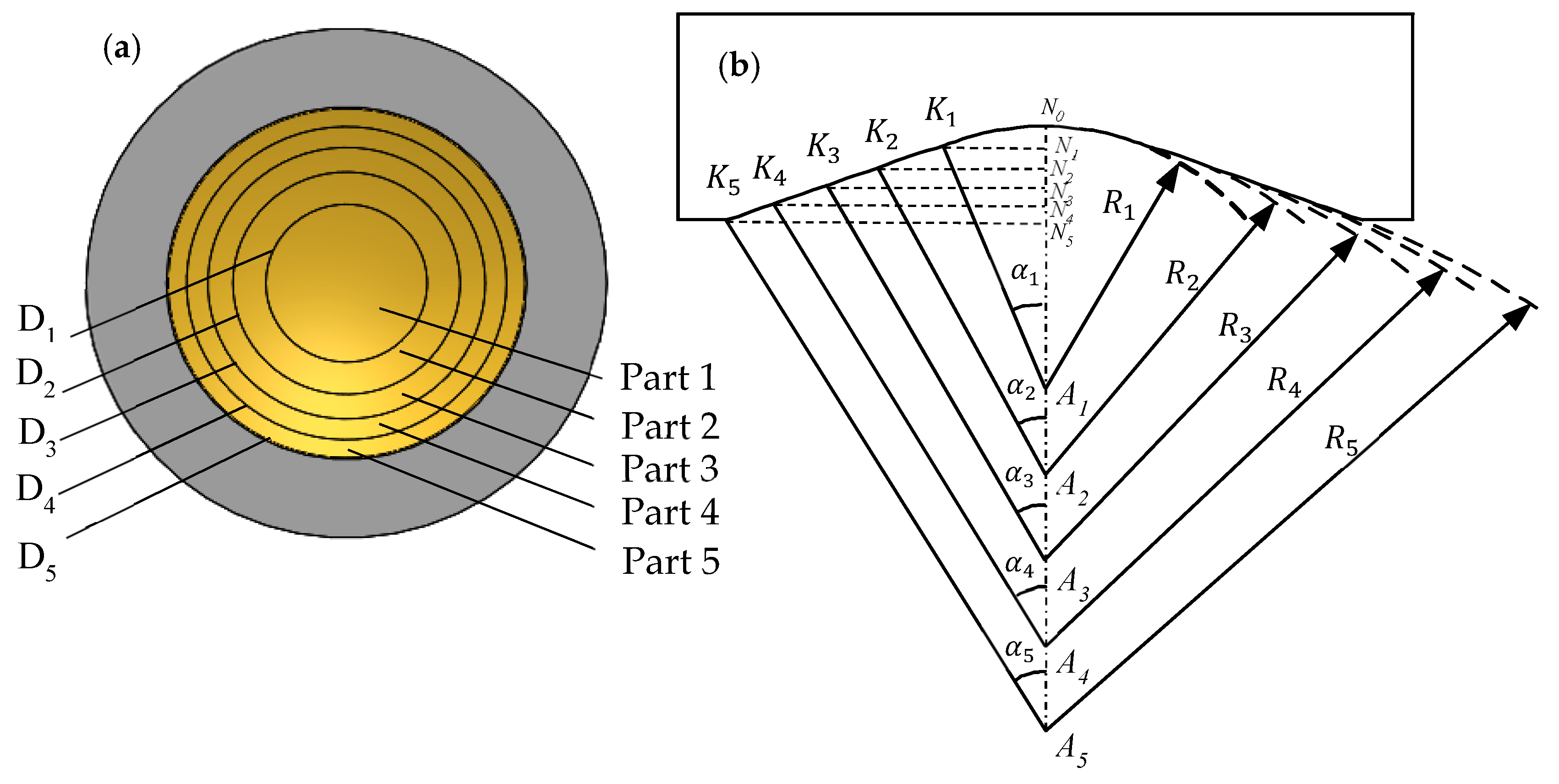
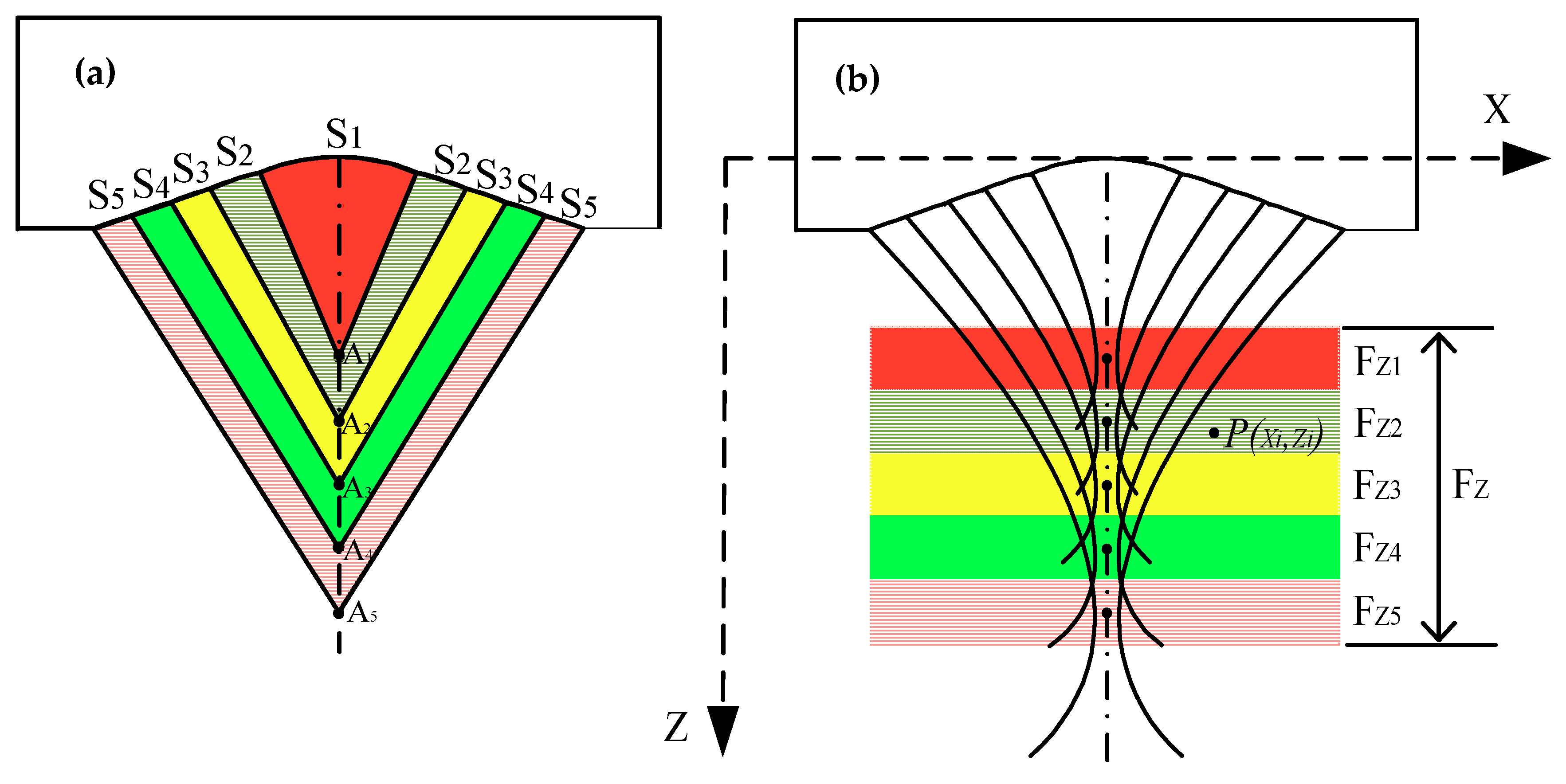
2.2.2. Design of the Multifocal Point Transducer
- -
- The radius of the spheres (focal length): R1 = A1N0 = A1K1, R2 = A2K2 = A2K1, R3 = A3K3 = A3K2, R4 = A4K4 = A4K3, R5 = A5K5 = A5K4
- -
- The aperture diameter of each part: , where, i = 1 to 5.
- -
- The height of the spherical part: , where, i = 1 to 5.
- -
- The distance between two closed focal points: , where, i = 1 to 4.
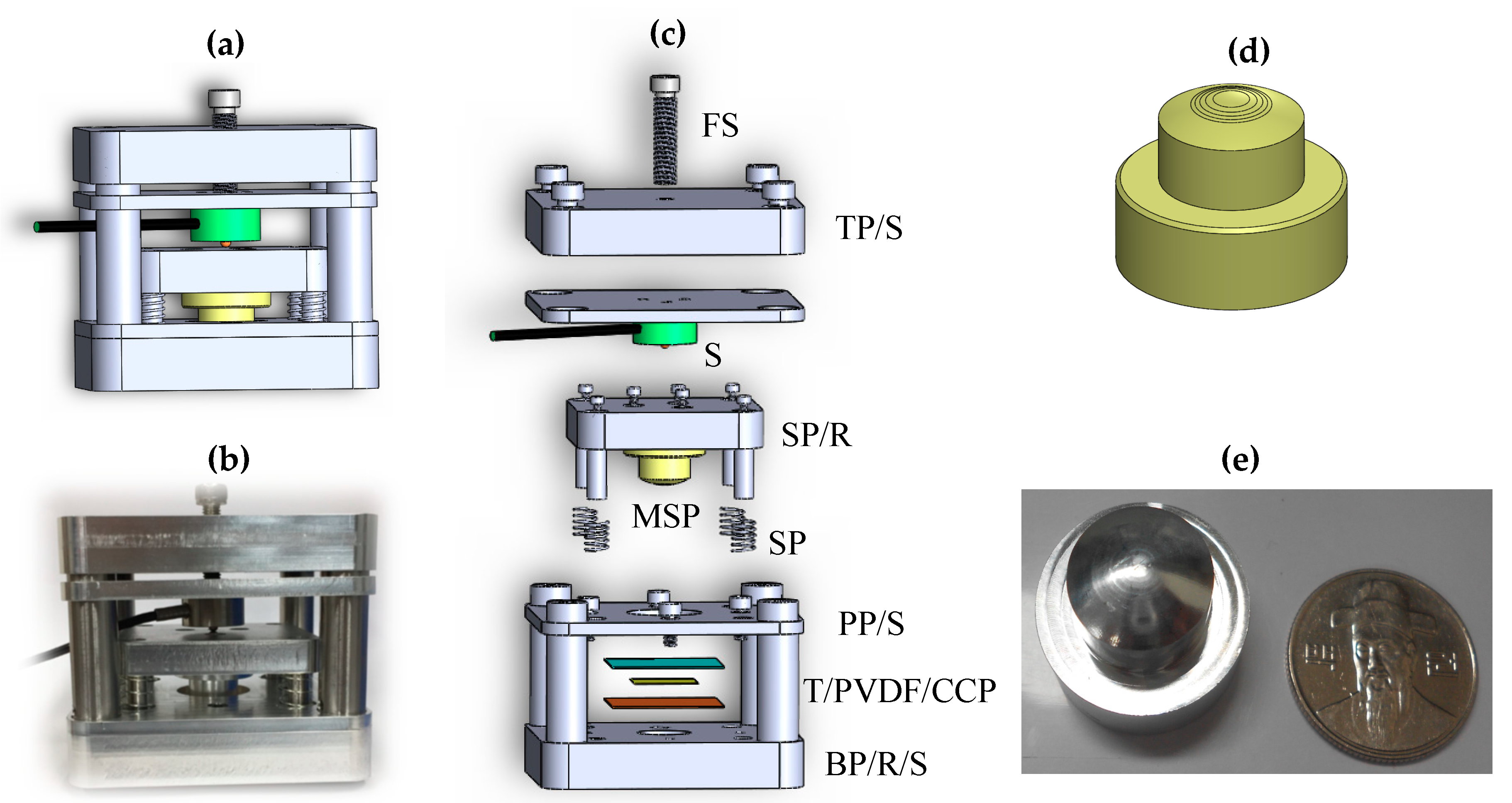
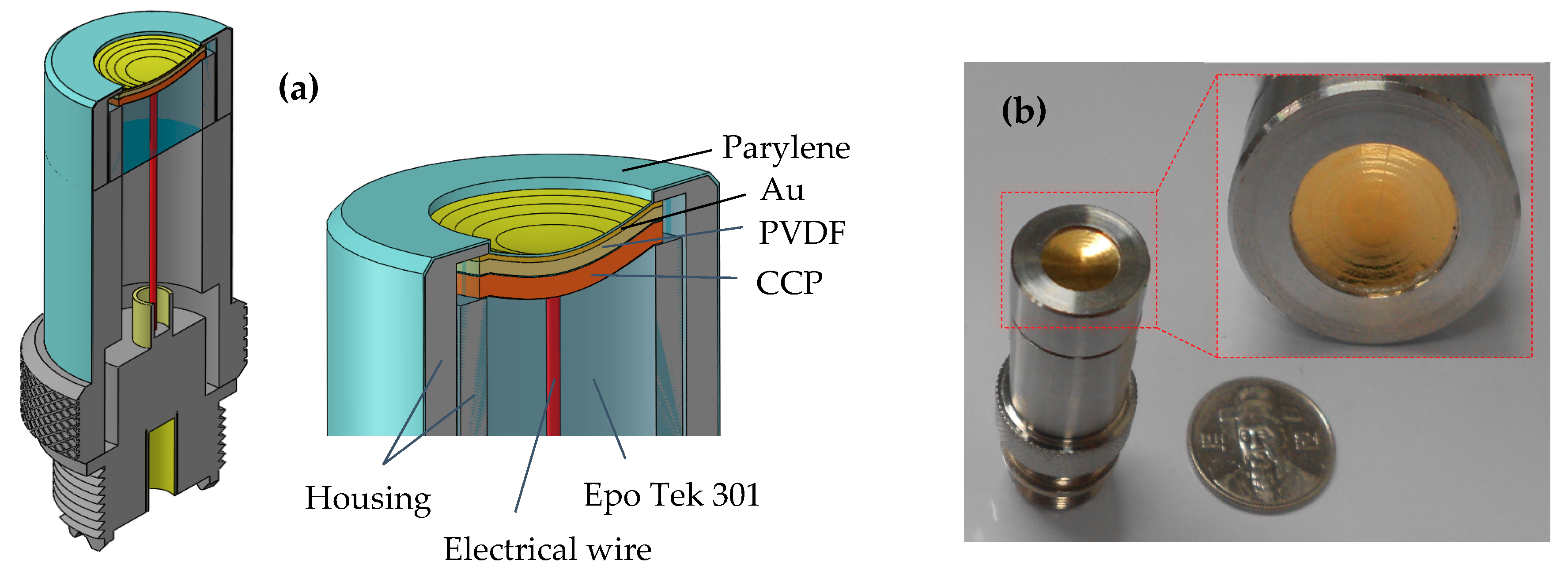
2.3. Transducer Fabrication
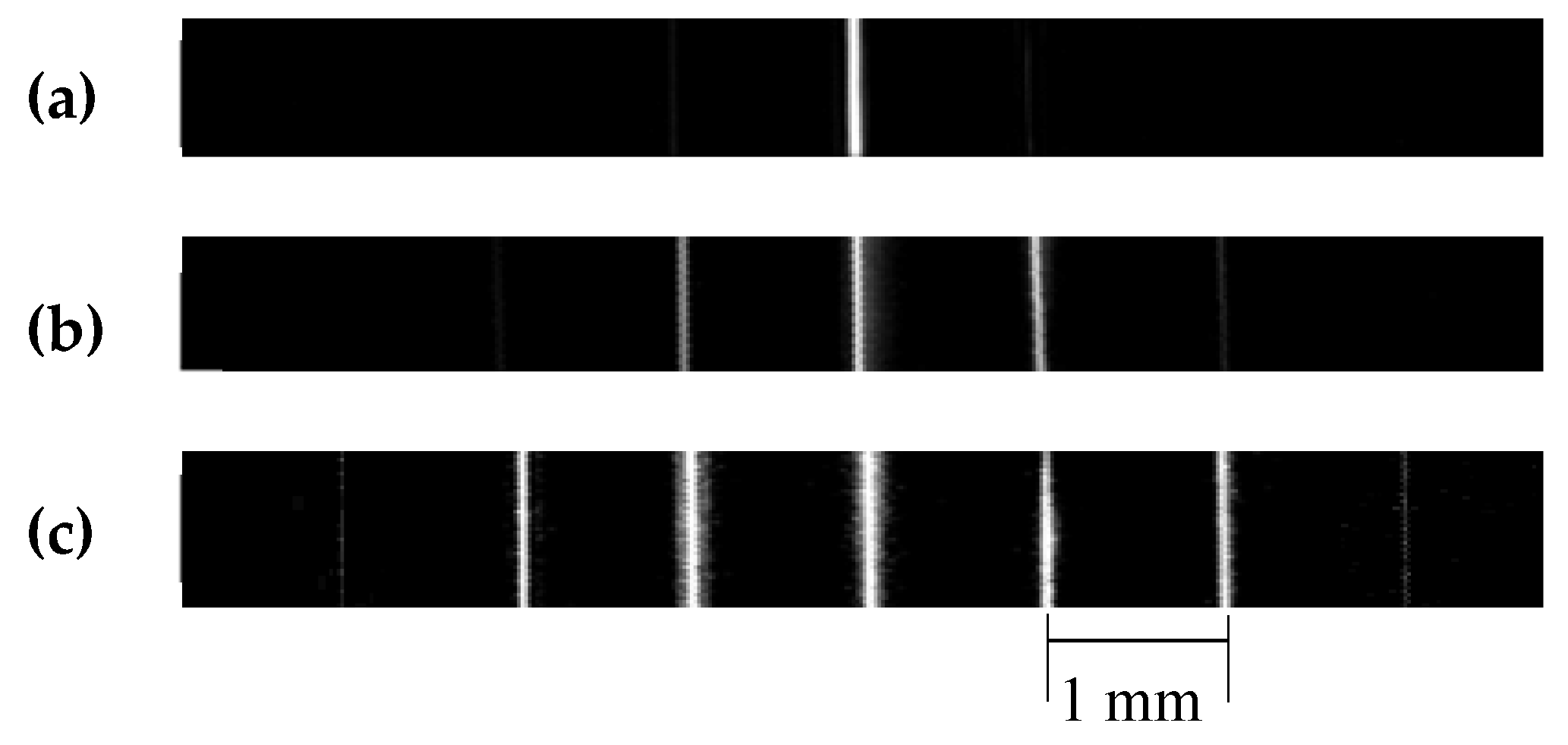
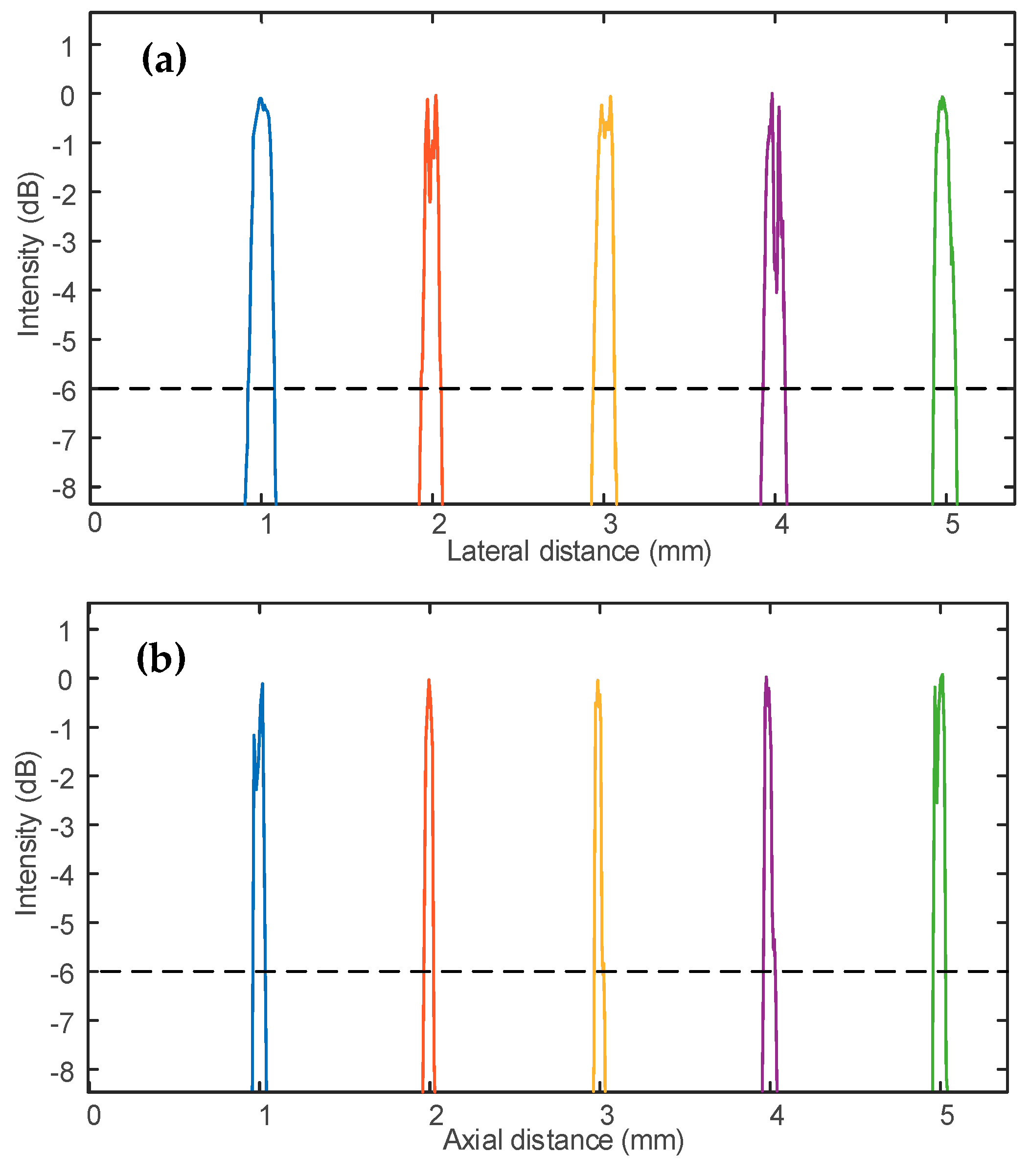
3. Performance Evaluation and Discussion
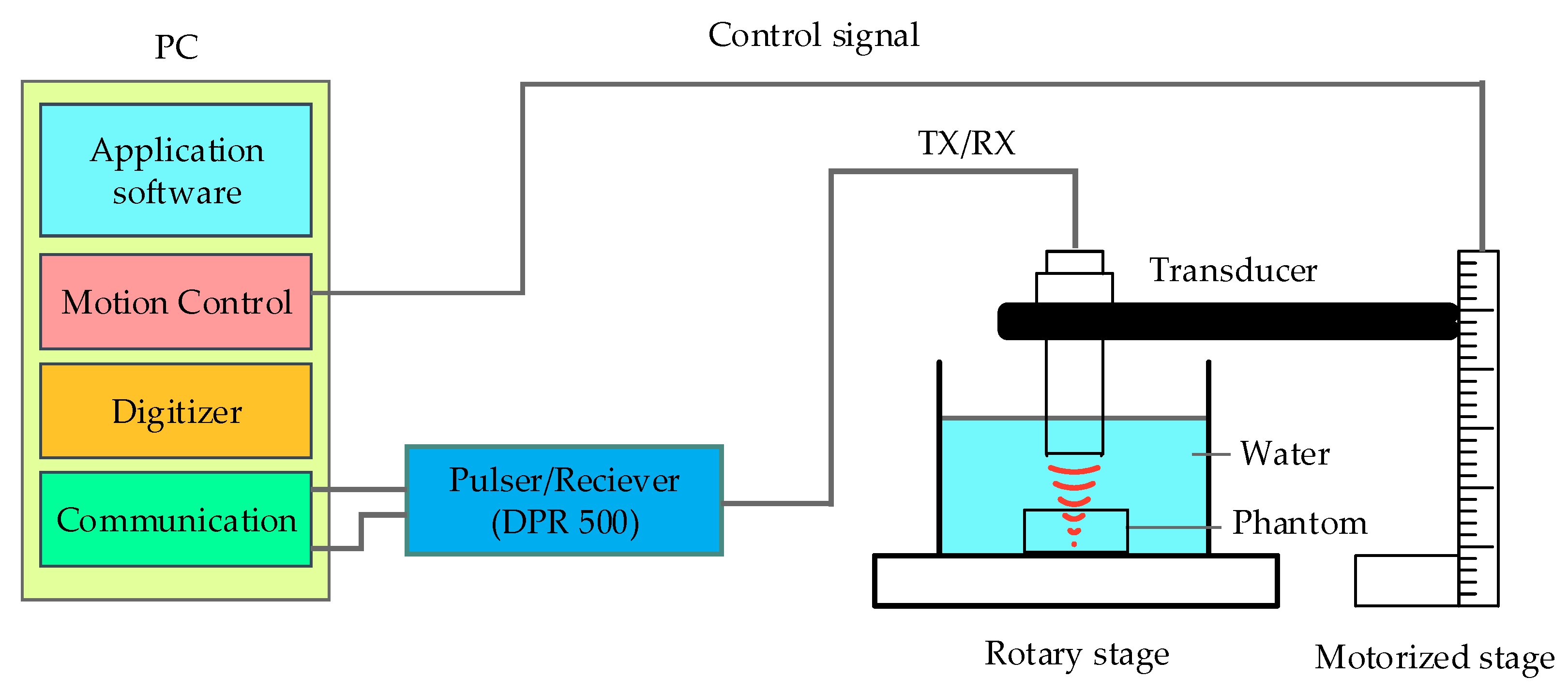
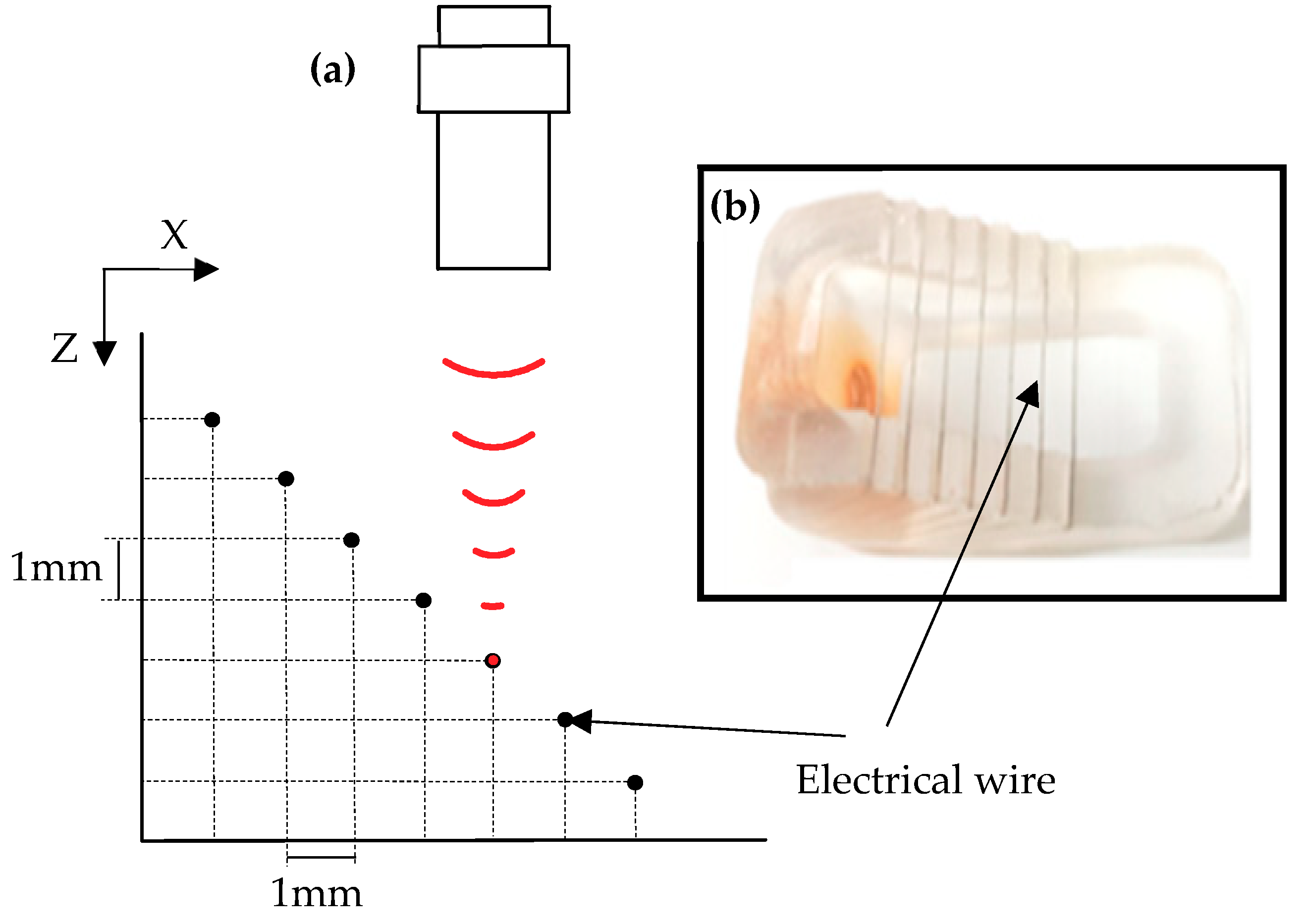
3.1. Experimental Setup
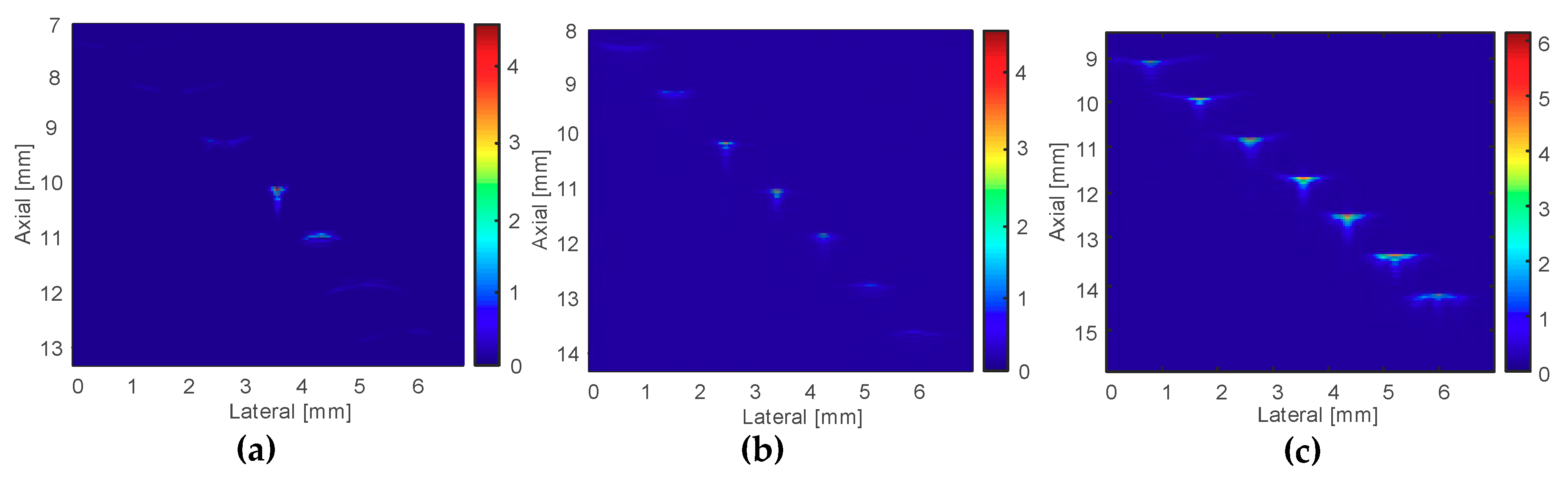
3.2. Results and Discussions
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, Y.; Qiu, W.; Lam, K.; Liu, B.; Jiang, X.; Zheng, H.; Luo, H.; Chan, H.; Dai, J. Focused intravascular ultrasonic probe using dimpled transducer elements. Ultrasonics 2015, 56, 227–231. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Moon, J.-Y.; Chang, J. A 35 MHz/105 MHz Dual-Element Focused Transducer for Intravascular Ultrasound Tissue Imaging Using the Third Harmonic. Sensors 2018, 18, 2290. [Google Scholar] [CrossRef]
- Snook, K.A.; Jian-Zhong, Z.; Alves, C.H.F.; Cannata, J.M.; Wo-Hsing, C.; Meyer, R.J.; Ritter, T.A.; Shung, K.K. Design, fabrication, and evaluation of high frequency, single-element transducers incorporating different materials. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2002, 49, 169–176. [Google Scholar] [CrossRef]
- Nhat Quang, B.; Kyu Kyu, H.; Yong Wook, L.; Hyun Wook, K.; Junghwan, O. Ex vivo detection of macrophages in atherosclerotic plaques using intravascular ultrasonic-photoacoustic imaging. Phys. Med. Biol. 2017, 62, 501. [Google Scholar]
- Ketterling, J.A.; Lizzi, F.L.; Aristizábal, O.; Turnbull, D.H. Design and fabrication of a 40-MHz annular array transducer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 52, 672. [Google Scholar] [CrossRef] [PubMed]
- Ketterling, J.A.; Aristizábal, O.; Turnbull, D.H. High-frequency piezopolymer transducers with a copper-clad polyimide backing layer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2006, 53, 1376–1380. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Robert, M.; Molingou, G.; Snook, K.; Cannata, J.; Shung, K.K. Fabrication of focused poly(vinylidene fluoride-trifluoroethylene) P(VDF-TrFE) copolymer 40–50 MHz ultrasound transducers on curved surfaces. J. Appl. Phys. 2004, 96, 252–256. [Google Scholar] [CrossRef]
- Jeong, J.S.; Kirk Shung, K. Improved fabrication of focused single element P(VDF–TrFE) transducer for high frequency ultrasound applications. Ultrasonics 2013, 53, 455–458. [Google Scholar] [CrossRef] [Green Version]
- Lu, H.; Shao, P.; Ranasinghesagara, J.; Dewolf, T.; Harrison, T.; Gibson, W.; Zemp, R. Improved Depth-of-Field Photoacoustic Microscopy with a Custom High-Frequency Annular Array Transducer; International Society for Optics and Photonics: San Francisco, CA, USA, 2011; Volume 7899. [Google Scholar]
- Hsu, H.-S.; Zheng, F.; Li, Y.; Lee, C.; Zhou, Q.; & Kirk Shung, K. Focused high frequency needle transducer for ultrasonic imaging and trapping. Appl. Phys. Lett. 2012, 101, 024105. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Lee, C.; Kim, E.S.; Wu, D.; Hu, C.; Zhou, Q.; Shung, K.K.; Wang, G.; Yu, H. High-overtone self-focusing acoustic transducers for high-frequency ultrasonic Doppler. Ultrasonics 2010, 50, 544–547. [Google Scholar] [CrossRef] [Green Version]
- Cannata, J.M.; Williams, J.A.; Zhou, Q.F.; Sun, L.; Shung, K.K.; Yu, H.; Kim, E.S. Self-focused ZnO transducers for ultrasonic biomicroscopy. J. Appl. Phys. 2008, 103, 084109. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Lam, K.H.; Chen, R.; Chen, Z.; Yu, P.; Chen, Z.; Shung, K.K.; Zhou, Q. An adjustable multi-scale single beam acoustic tweezers based on ultrahigh frequency ultrasonic transducer. Biotechnol. Bioeng. 2017, 114, 2637–2647. [Google Scholar] [CrossRef] [PubMed]
- Jang, J.; Chang, J.H. Design and fabrication of double-focused ultrasound transducers to achieve tight focusing. Sensors 2016, 16, 1248. [Google Scholar] [CrossRef] [PubMed]
- Lim, H.G.; Shung, K.K. Quantification of Inter-Erythrocyte Forces with Ultra-High Frequency (410 MHz) Single Beam Acoustic Tweezer. Ann. Biomed. Eng. 2017, 45, 2174–2183. [Google Scholar] [CrossRef] [PubMed]
- Daoud, M.; Shtaiyat, A.; Zayadeen, A.; Alazrai, R. Accurate Needle Localization Using Two-Dimensional Power Doppler and B-Mode Ultrasound Image Analyses: A Feasibility Study. Sensors 2018, 18, 3475. [Google Scholar] [CrossRef] [PubMed]
- Jeong, J.S. Dual-Element Transducer with Phase-Inversion for Wide Depth of Field in High-Frequency Ultrasound Imaging. Sensors 2014, 14, 14278–14288. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Passmann, C.; Ermert, H. A 100-MHz ultrasound imaging system for dermatologic and ophthalmologic diagnostics. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1996, 43, 545–552. [Google Scholar] [CrossRef]
- Chabok, H.R.; Cannata, J.M.; Kim, H.H.; Williams, J.A.; Park, J.; Shung, K.K. A high-frequency annular-array transducer using an interdigital bonded 1-3 composite. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 206–214. [Google Scholar] [CrossRef] [Green Version]
- Deng, Z.; Yang, X.; Gong, H.; Luo, Q. Adaptive synthetic-aperture focusing technique for microvasculature imaging using photoacoustic microscopy. Opt. Express 2012, 20, 7555–7563. [Google Scholar] [CrossRef]
- Edwards, G.; Chan, H.; Batten, A.; Lam, K.; Luo, H.; Scott, D. PMN–PT single-crystal transducer for non-destructive evaluation. Sens. Actuators A Phys. 2006, 132, 434–440. [Google Scholar] [CrossRef]
- Zhou, Q.; Lau, S.; Wu, D.; Kirk Shung, K. Piezoelectric films for high frequency ultrasonic transducers in biomedical applications. Prog. Mater. Sci. 2011, 56, 139–174. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liang, Y.; Feng, Q.; Li, D. Loosening Monitoring of the Threaded Pipe Connection Using Time Reversal Technique and Piezoceramic Transducers. Sensors 2018, 18, 2280. [Google Scholar] [CrossRef] [PubMed]
- Chiu, C.T.; Kang, B.J.; Eliahoo, P.; Abraham, T.; Shung, K.K. Fabrication and Characterization of a 20-MHz Microlinear Phased-Array Transducer for Intervention Guidance. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2017, 64, 1261–1268. [Google Scholar] [CrossRef]
- Zhou, Q.; Lam, K.H.; Zheng, H.; Qiu, W.; Shung, K.K. Piezoelectric single crystal ultrasonic transducers for biomedical applications. Prog. Mater. Sci. 2014, 66, 87–111. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fei, C.; Yang, Y.; Guo, F.; Lin, P.; Chen, Q.; Zhou, Q.; Sun, L. PMN-PT Single Crystal Ultrasonic Transducer with Half-Concave Geometric Design for IVUS Imaging. IEEE Trans. Biomed. Eng. 2018, 65, 2087–2092. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Q.; Xu, X.; Gottlieb, E.J.; Sun, L.; Cannata, J.M.; Ameri, H.; Humayun, M.S.; Han, P.; Shung, K.K. PMN-PT single crystal, high-frequency ultrasonic needle transducers for pulsed-wave Doppler application. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2007, 54, 668–675. [Google Scholar] [CrossRef] [PubMed]
- Ho, L.K.; Hsiu-Sheng, H.; Ying, L.; Changyang, L.; Anderson, L.; Qifa, Z.; Sok, K.E.; Koping, S.K. Ultrahigh frequency lensless ultrasonic transducers for acoustic tweezers application. Biotechnol. Bioeng. 2013, 110, 881–886. [Google Scholar]
- Cannata, J.M.; Ritter, T.A.; Wo-Hsing, C.; Silverman, R.H.; Shung, K.K. Design of efficient, broadband single-element (20-80 MHz) ultrasonic transducers for medical imaging applications. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2003, 50, 1548–1557. [Google Scholar] [CrossRef]
- Kim, J.; Lindsey, B.D.; Li, S.; Dayton, P.A.; Jiang, X. Dual-frequency transducer with a wideband PVDF receiver for contrast-enhanced, adjustable harmonic imaging. In Health Monitoring of Structural and Biological Systems 2017; International Society for Optics and Photonics: San Diego, CA, USA, 2017; p. 101700T. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Value |
|---|---|
| Electromechanical coupling coefficient (Kt) | 0.12–0.15 |
| Molecular formula | (CH2CF2) |
| Relative clamped dielectric constant () | 11 |
| Mechanical quality factor (Qm) | ~20 |
| Density (kg/m3) | 1800 |
| Longitudinal wave velocity (m/s) | 2110 |
| Acoustic impedance (MRayl) | 3.9 |
| Curie temperature (°C) | 100 |
| Melting temperature (°C) | 160–180 |
| Parameter | 1st Part | 2nd Part | 3rd Part | 4th Part | 5th Part |
|---|---|---|---|---|---|
| Focal depth (mm) | 10 | 10.98 | 11.95 | 12.91 | 13.86 |
| Aperture diameter (mm) | 4 | 5.62 | 6.88 | 7.92 | 8.84 |
| f#i | 2.5 | 1.94 | 1.73 | 1.62 | 1.56 |
| Fzi (mm) | 1.48 | 0.91 | 0.73 | 0.64 | 0.59 |
| Transducer | Simulated (KLM) | Measured results | ||
|---|---|---|---|---|
| fc (MHz) | BW (%) | fc (MHz) | BW (%) | |
| T1 (SFP) | 50 | 66 | 51 | 68 |
| T2-P1 (MFP) | 50 | 68 | 50 | 68 |
| T2-P2 (MFP) | 49 | 69 | ||
| T2-P3 (MFP) | 49 | 72 | ||
| T3-P1 (MFP) | 50 | 68 | 50 | 66 |
| T3-P2 (MFP) | 49 | 67 | ||
| T3-P3 (MFP) | 47 | 68 | ||
| T3-P4 (MFP) | 50 | 68 | ||
| T3-P5 (MFP) | 48 | 70 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.P.; Truong, N.T.P.; Bui, N.Q.; Nguyen, V.T.; Hoang, G.; Choi, J.; Phan, T.T.V.; Pham, V.H.; Kim, B.-G.; Oh, J. Design, Fabrication, and Evaluation of Multifocal Point Transducer for High-Frequency Ultrasound Applications. Sensors 2019, 19, 609. https://doi.org/10.3390/s19030609
Nguyen TP, Truong NTP, Bui NQ, Nguyen VT, Hoang G, Choi J, Phan TTV, Pham VH, Kim B-G, Oh J. Design, Fabrication, and Evaluation of Multifocal Point Transducer for High-Frequency Ultrasound Applications. Sensors. 2019; 19(3):609. https://doi.org/10.3390/s19030609
Chicago/Turabian StyleNguyen, Thanh Phuoc, Nguyen Thanh Phong Truong, Nhat Quang Bui, Van Tu Nguyen, Giang Hoang, Jaeyeop Choi, Thi Tuong Vy Phan, Van Hiep Pham, Byung-Gak Kim, and Junghwan Oh. 2019. "Design, Fabrication, and Evaluation of Multifocal Point Transducer for High-Frequency Ultrasound Applications" Sensors 19, no. 3: 609. https://doi.org/10.3390/s19030609