Signal Denoising Method Using AIC–SVD and Its Application to Micro-Vibration in Reaction Wheels

Abstract
:1. Introduction
2. Theoretical Background
2.1. Singular Value Decomposition of Signals
2.2. Order Determination of Akaike Information Criterion
3. Signal Denoising of Akaike Information Criterion–Singular Value Decomposition
3.1. Selection of Hankel Matrix Rows and Columns
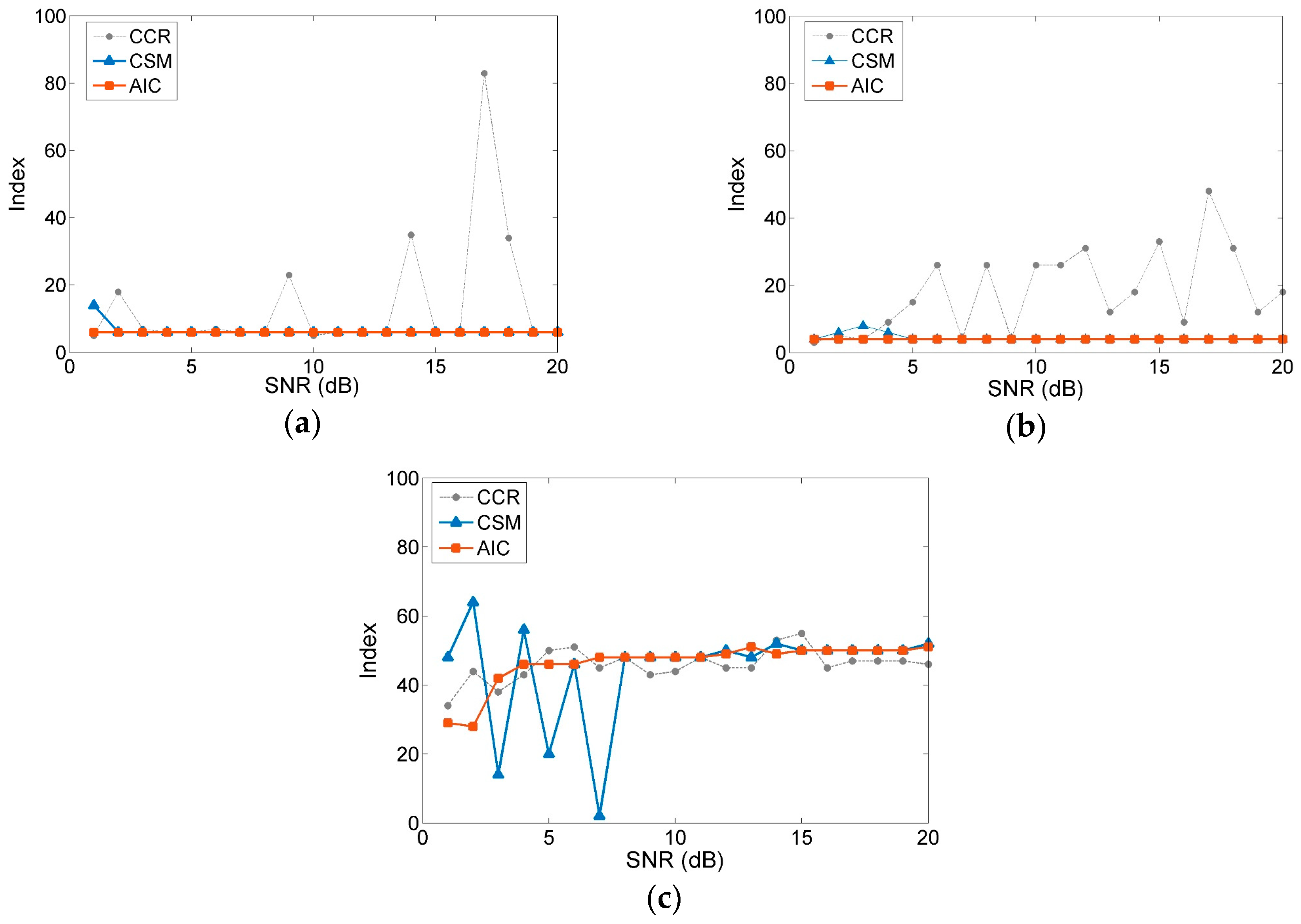
3.2. Verification and Improvement of Order Determination
3.3. Denoising of Akaike Information Criterion–Singular Value Decomposition
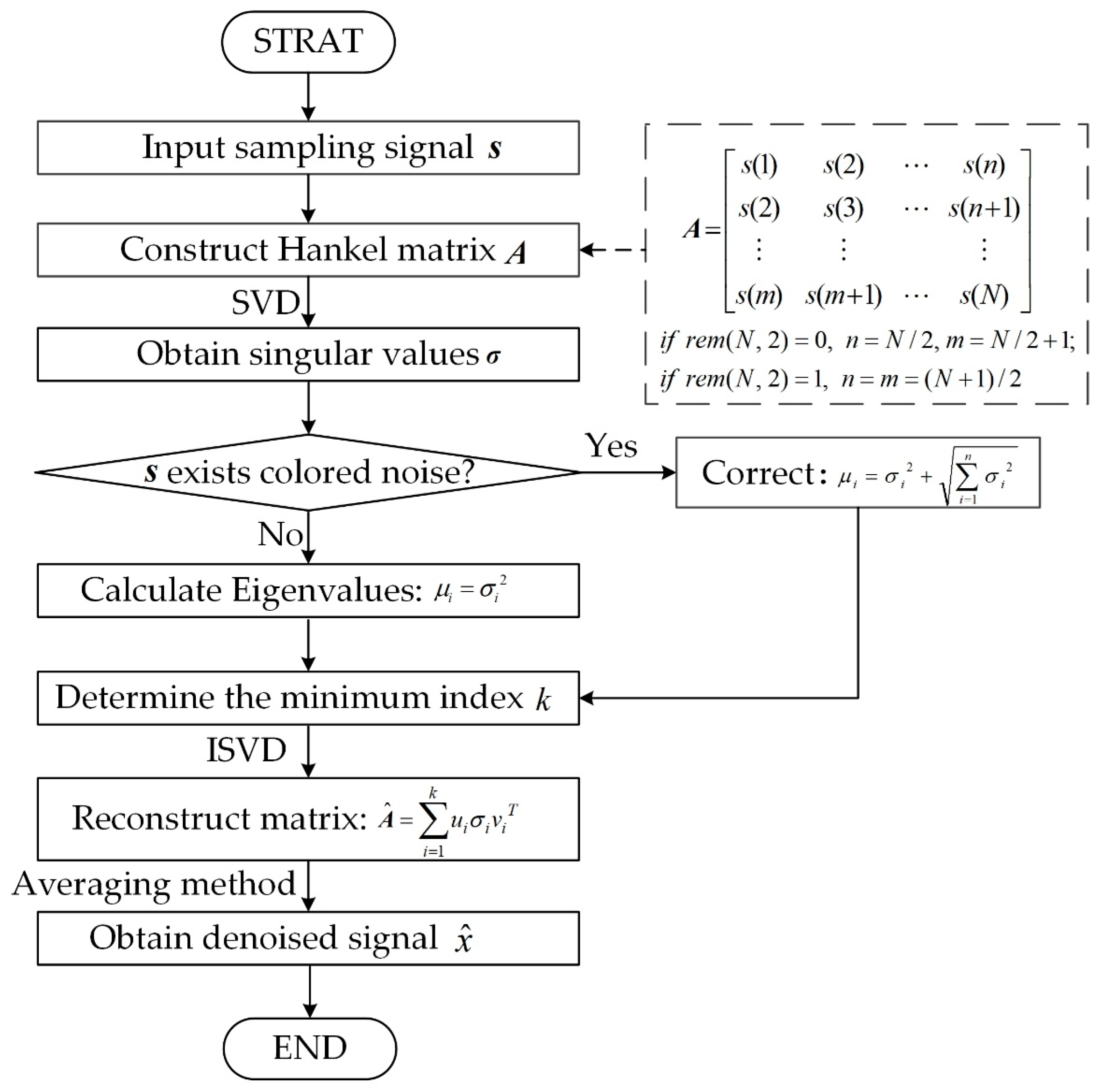
- Step 1.
- An m × n dimension Hankel matrix is chosen as the trajectory matrix of the sampling signal, , and then the optimal number of rows and columns of the matrix is selected according to the maximum energy criterion of the singular values;
- Step 2.
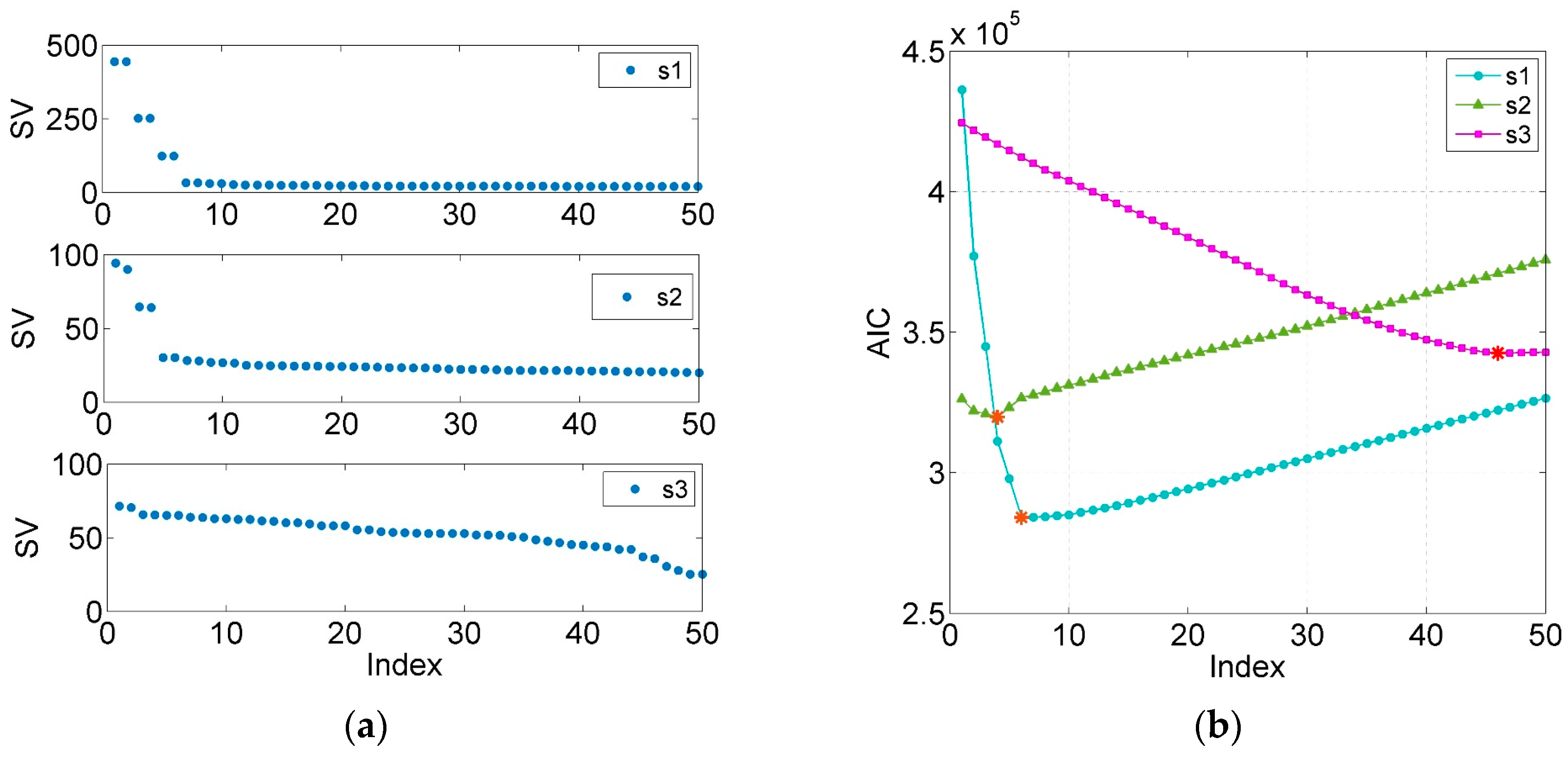
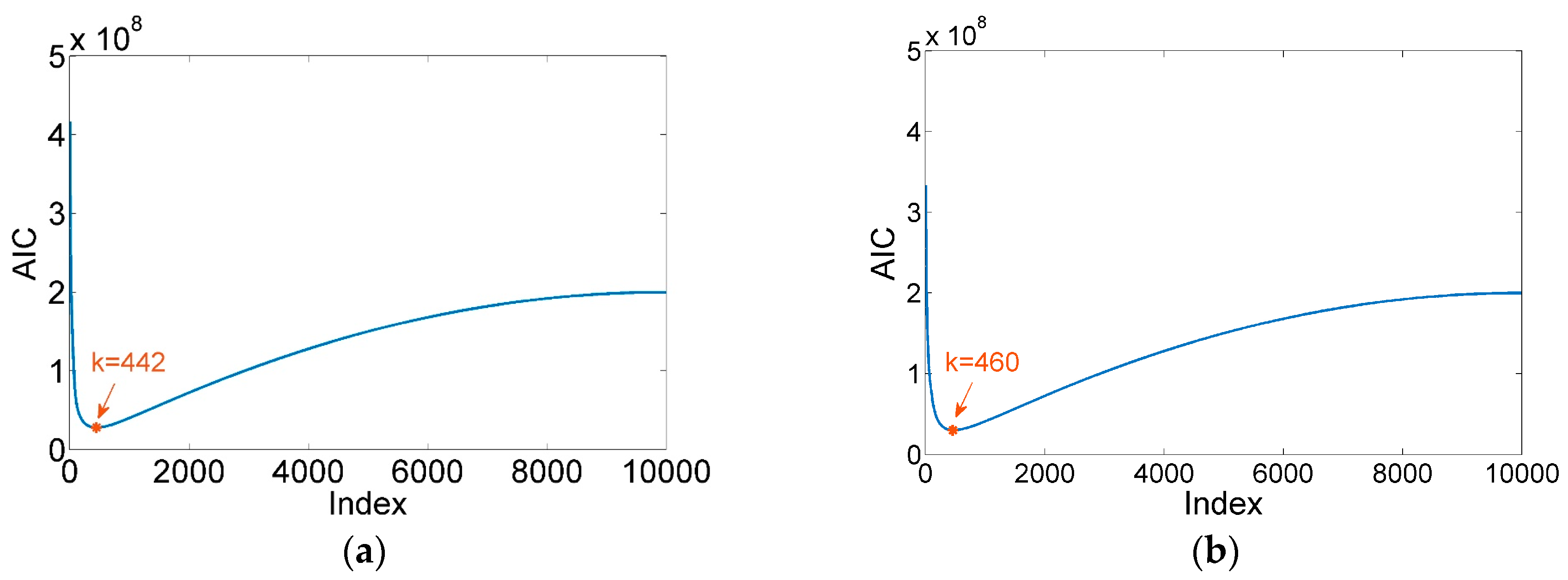
- SVD is performed on the optimal construction matrix to obtain a sequence of non-zero singular values, . For signals containing the colored noise, the eigenvalues are corrected according to Equation (16). Next, the index of the minimum AIC value is determined by using the AIC, which is the order of effective singular values;
- Step 3.
- The inverse operation of SVD is applied to the singular components of the forward order to obtain the approximate matrix, ;
- Step 4.
- According to the averaging method expressed in Equation (17), the denoised signal is obtained by the reconstruction of the time series signals from the approximate matrix.where , , and .
4. Simulation of Akaike Information Criterion–Singular Value Decomposition
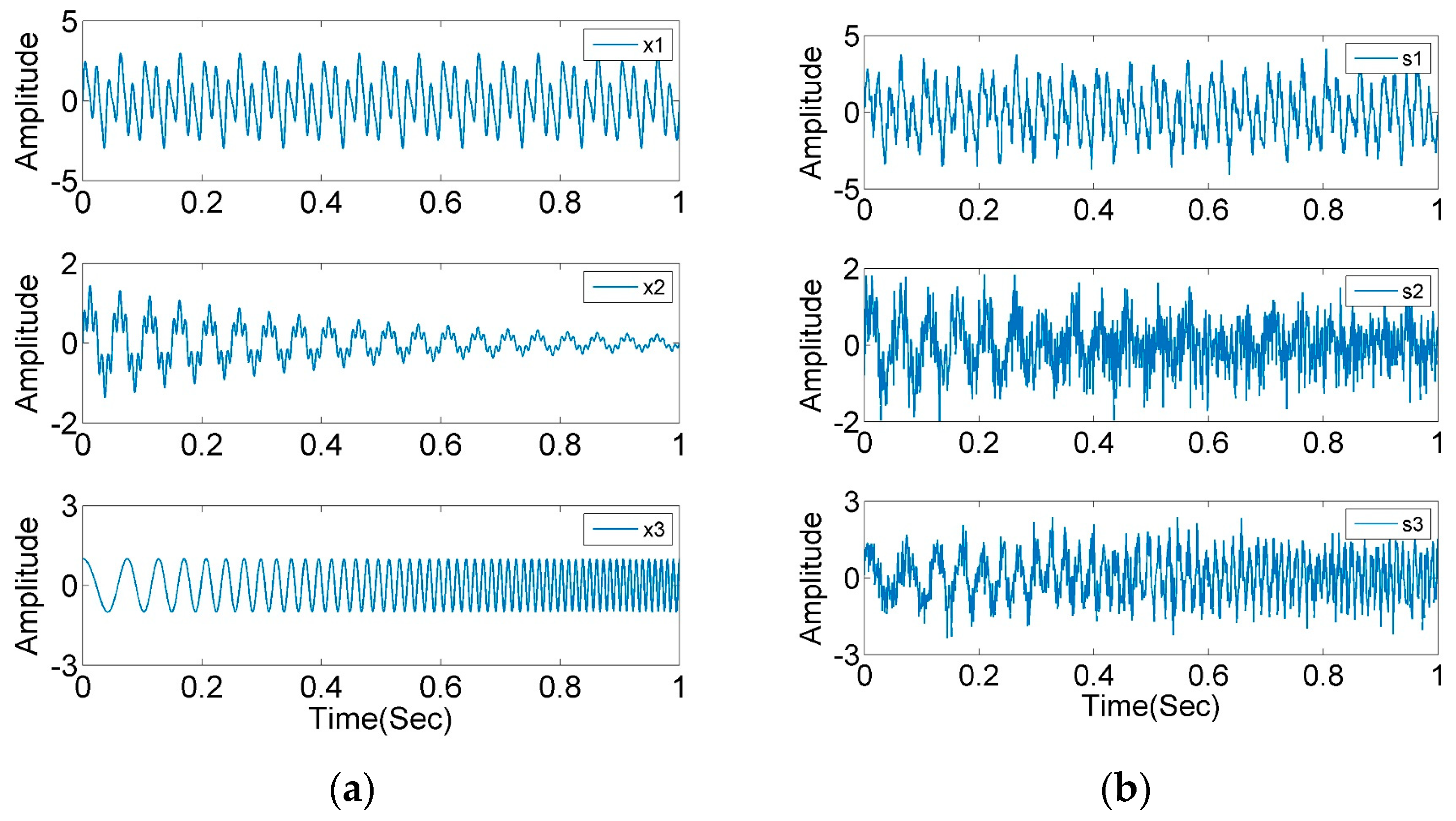
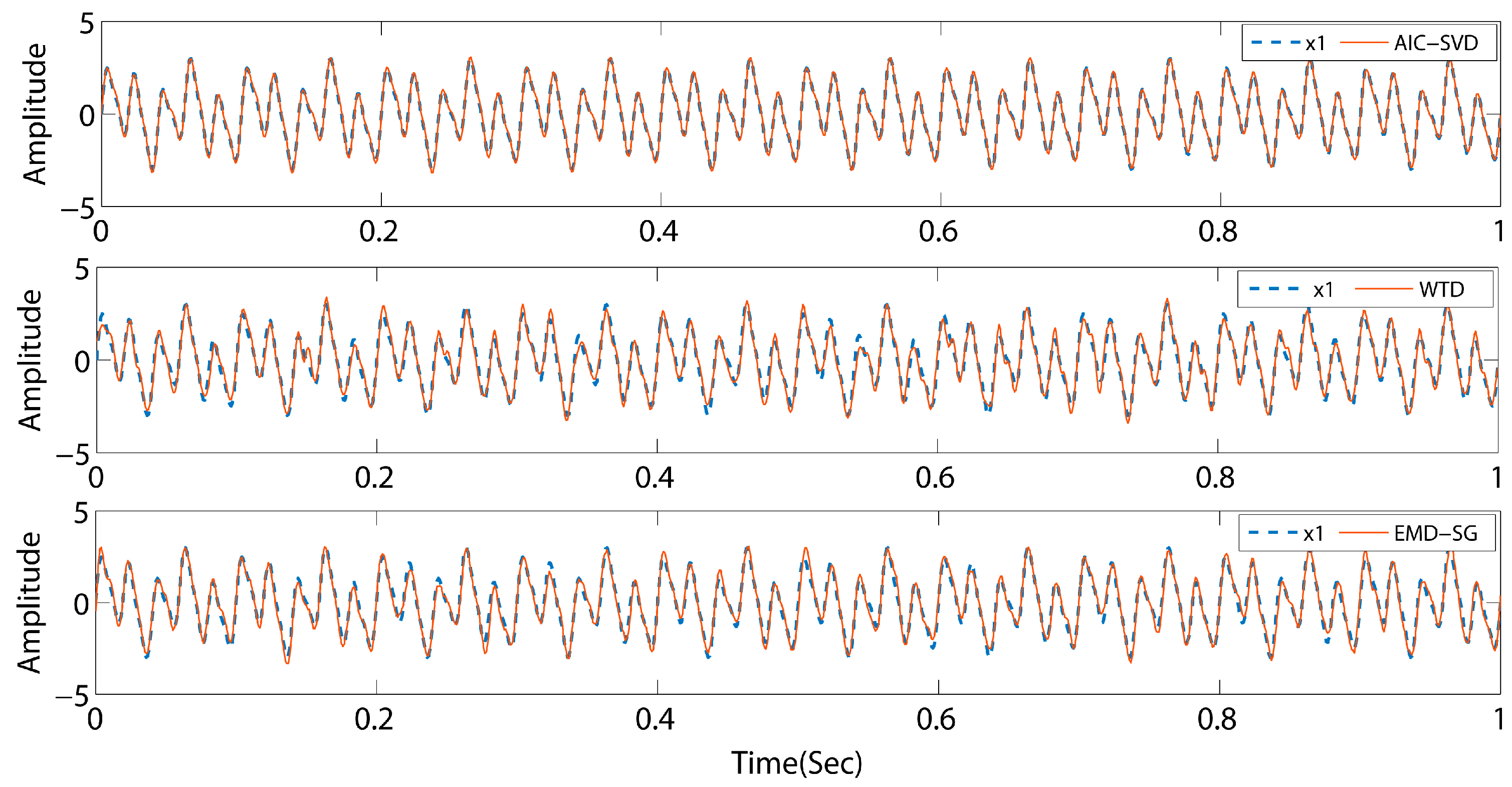
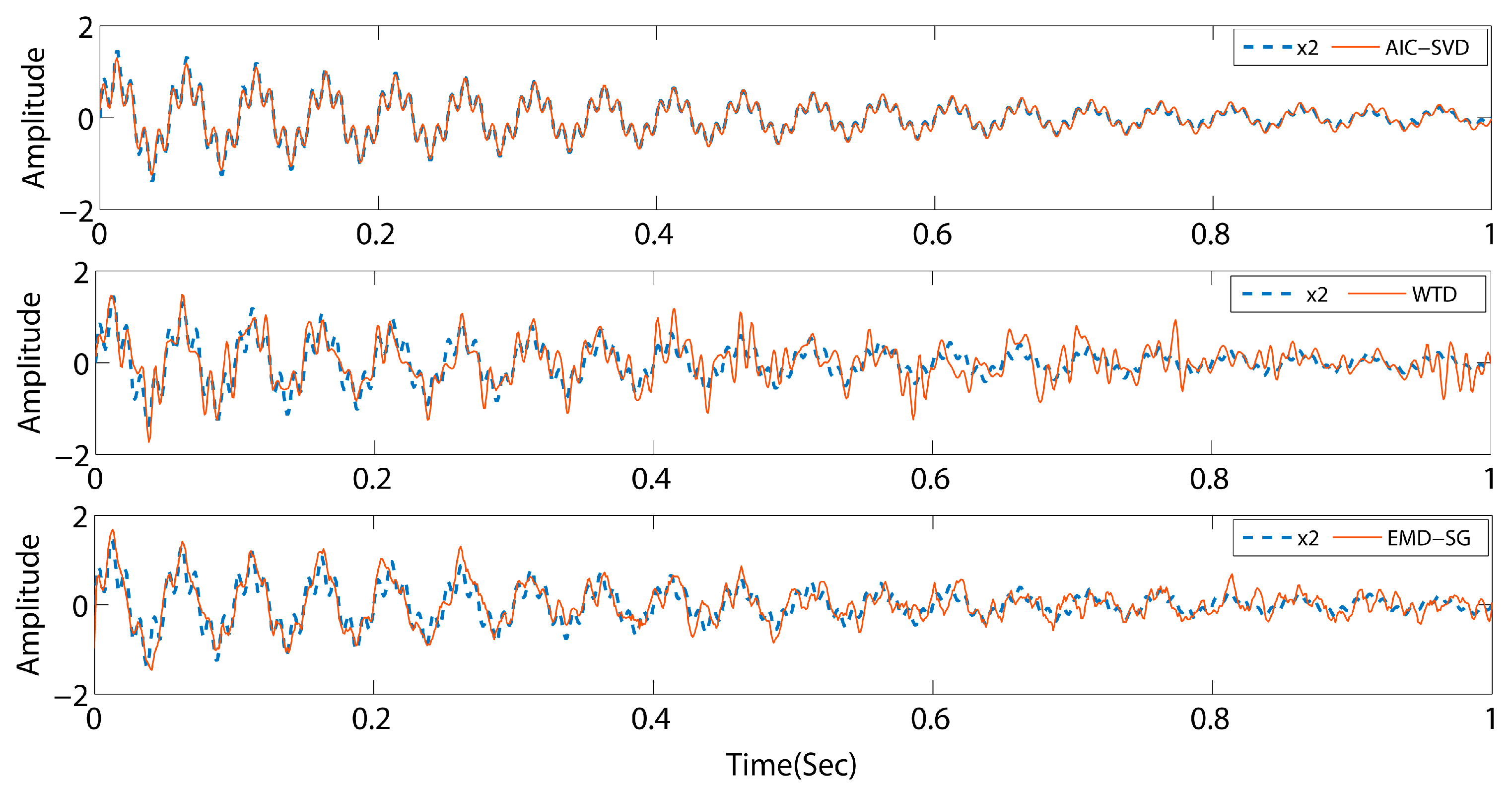
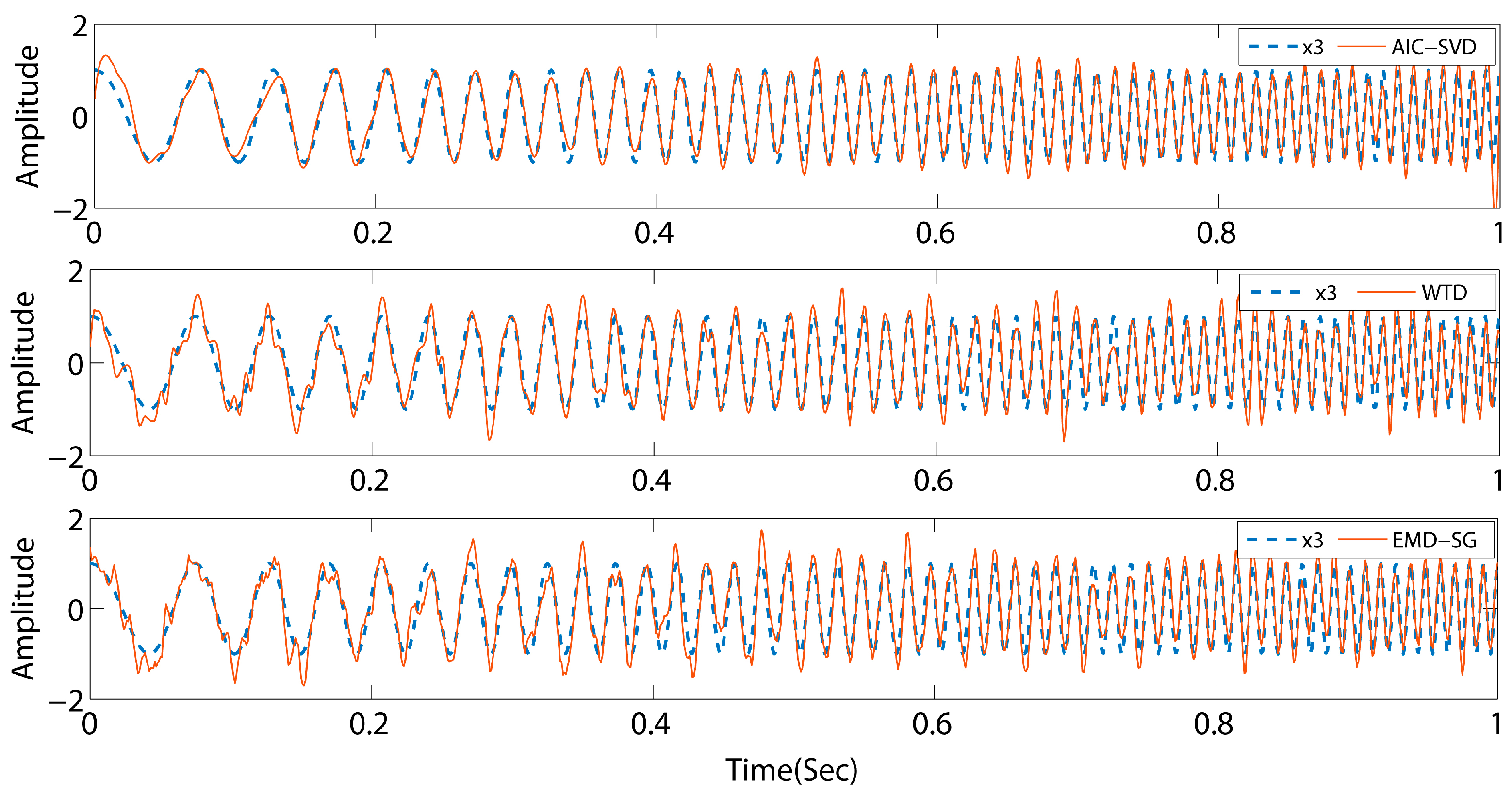
4.1. Numerical Simulation
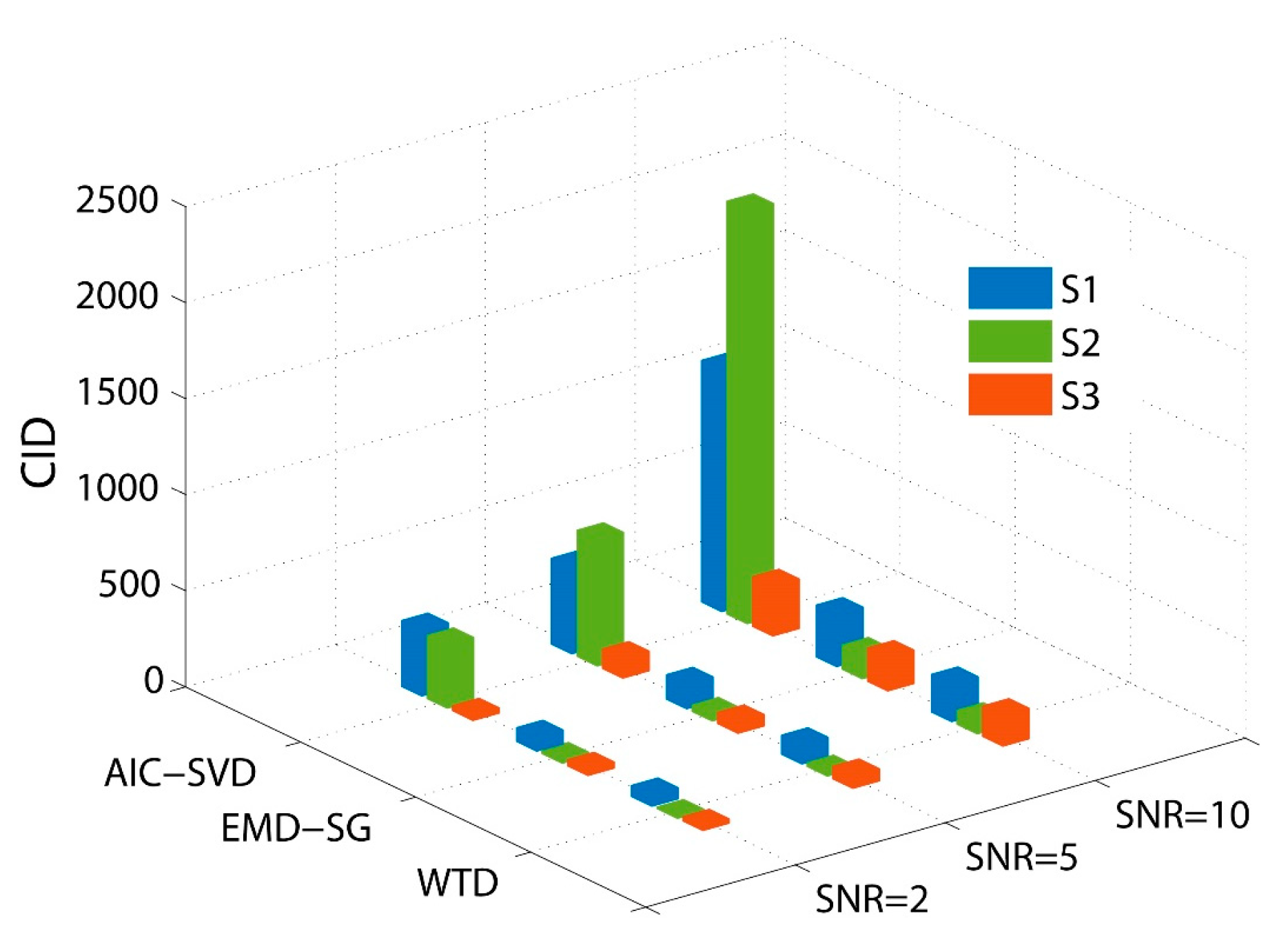
4.2. Denoising Performance Evaluation
5. Study on Micro-Vibration Signal Denoising of Reaction Wheels
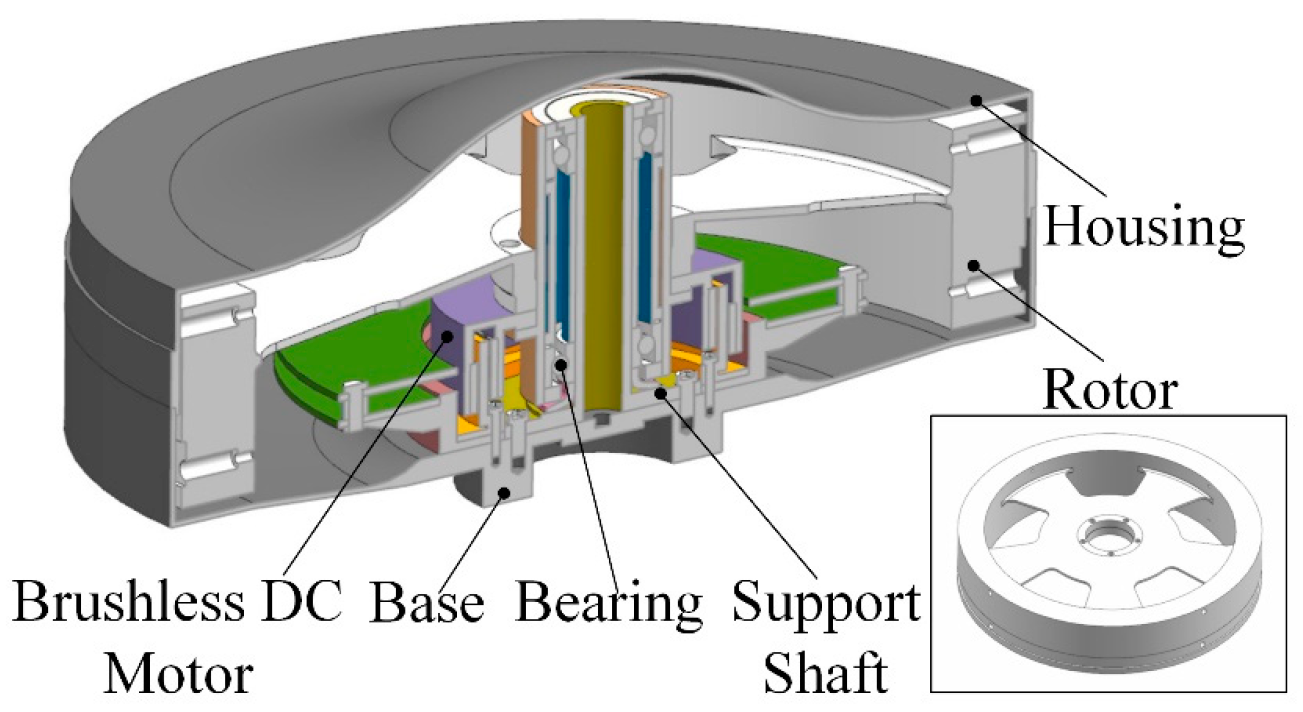
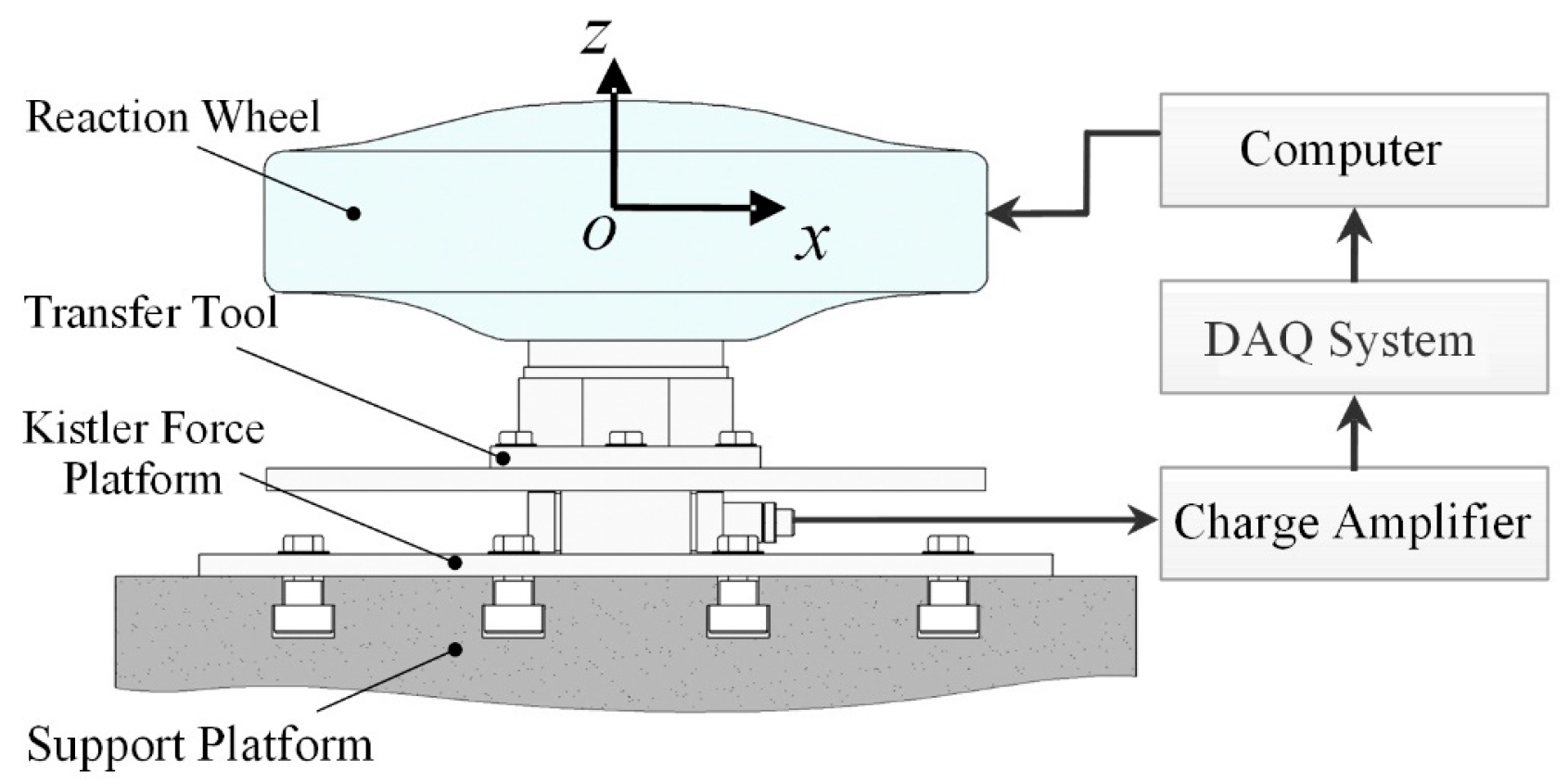
5.1. Micro-Vibration Test
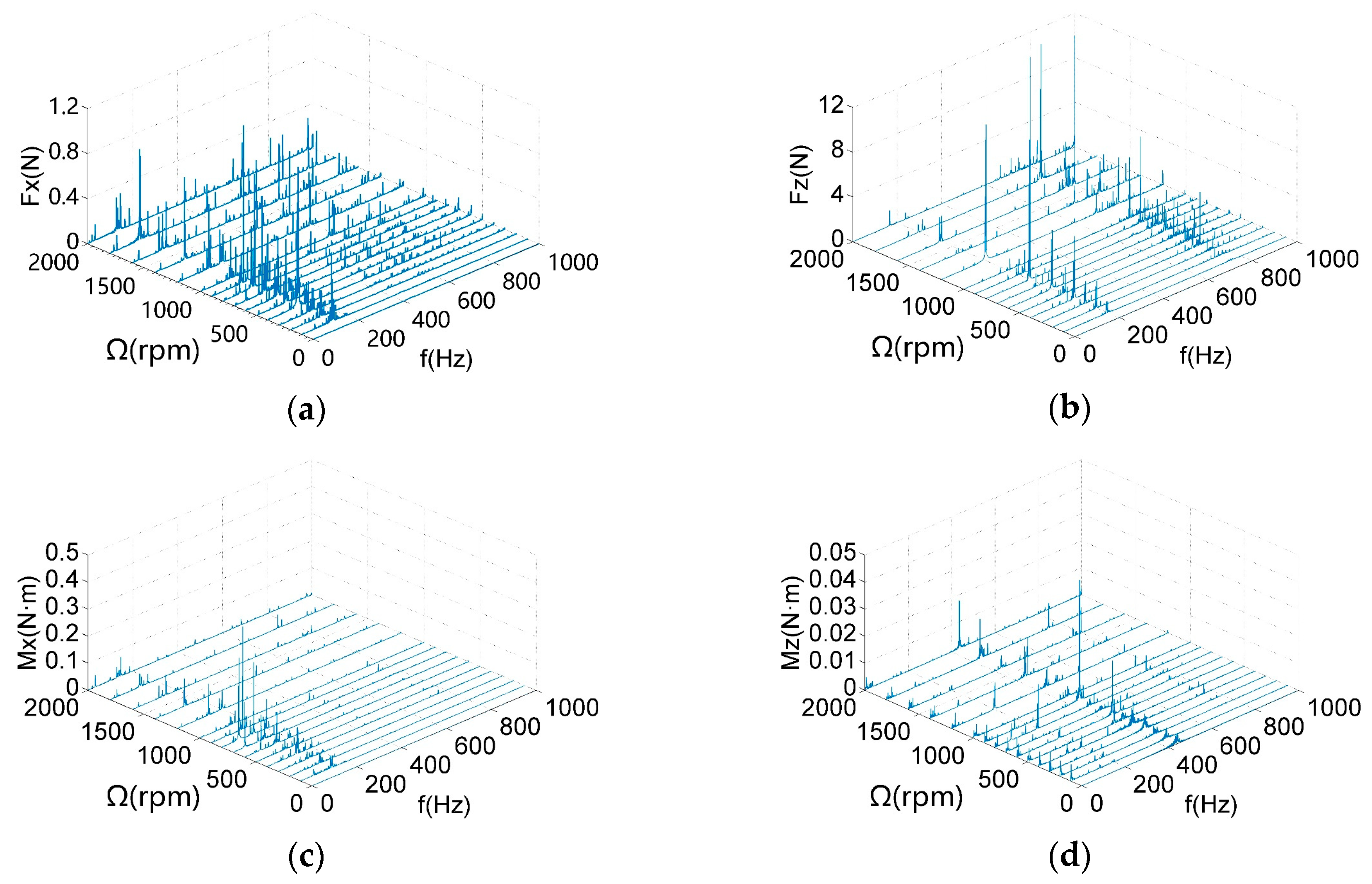
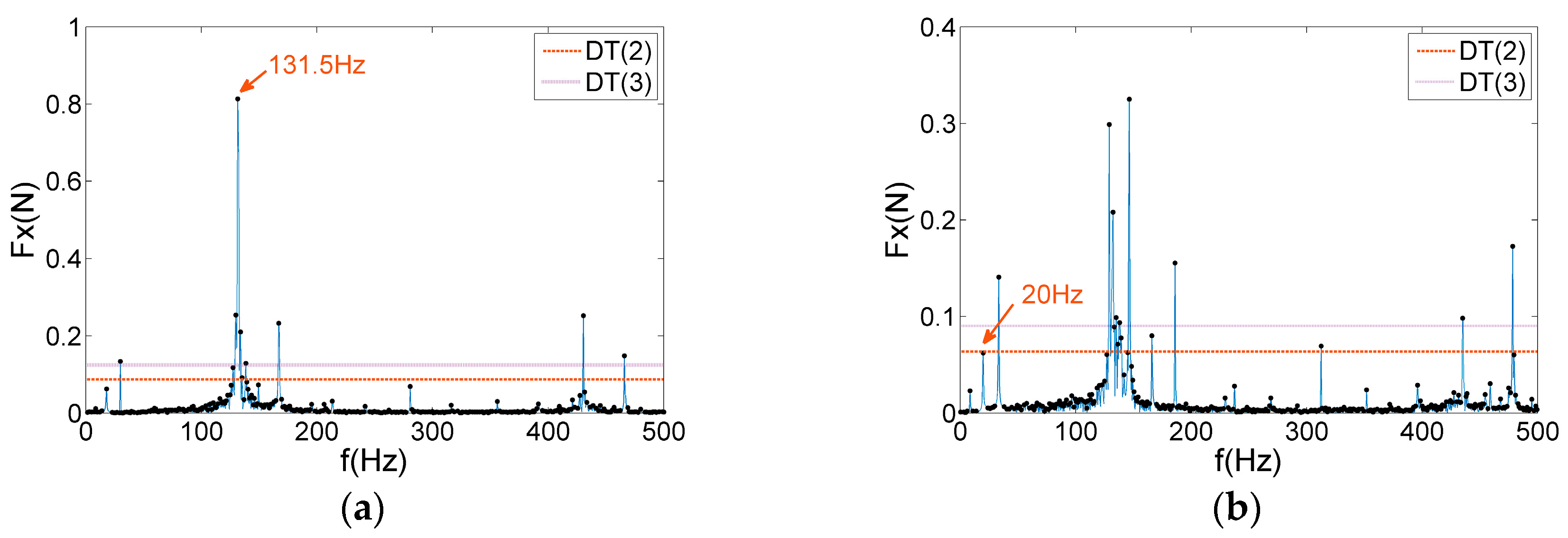
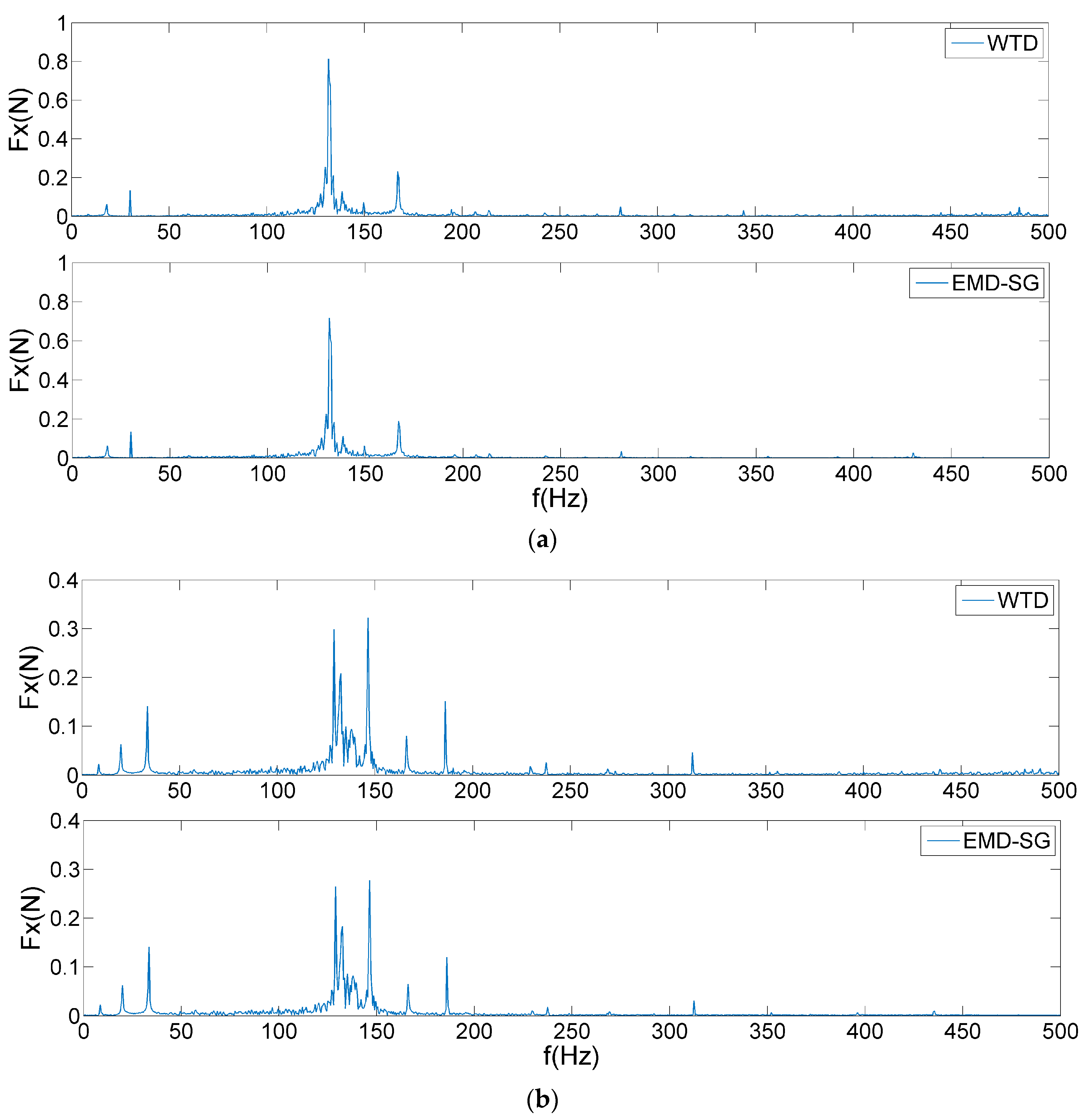
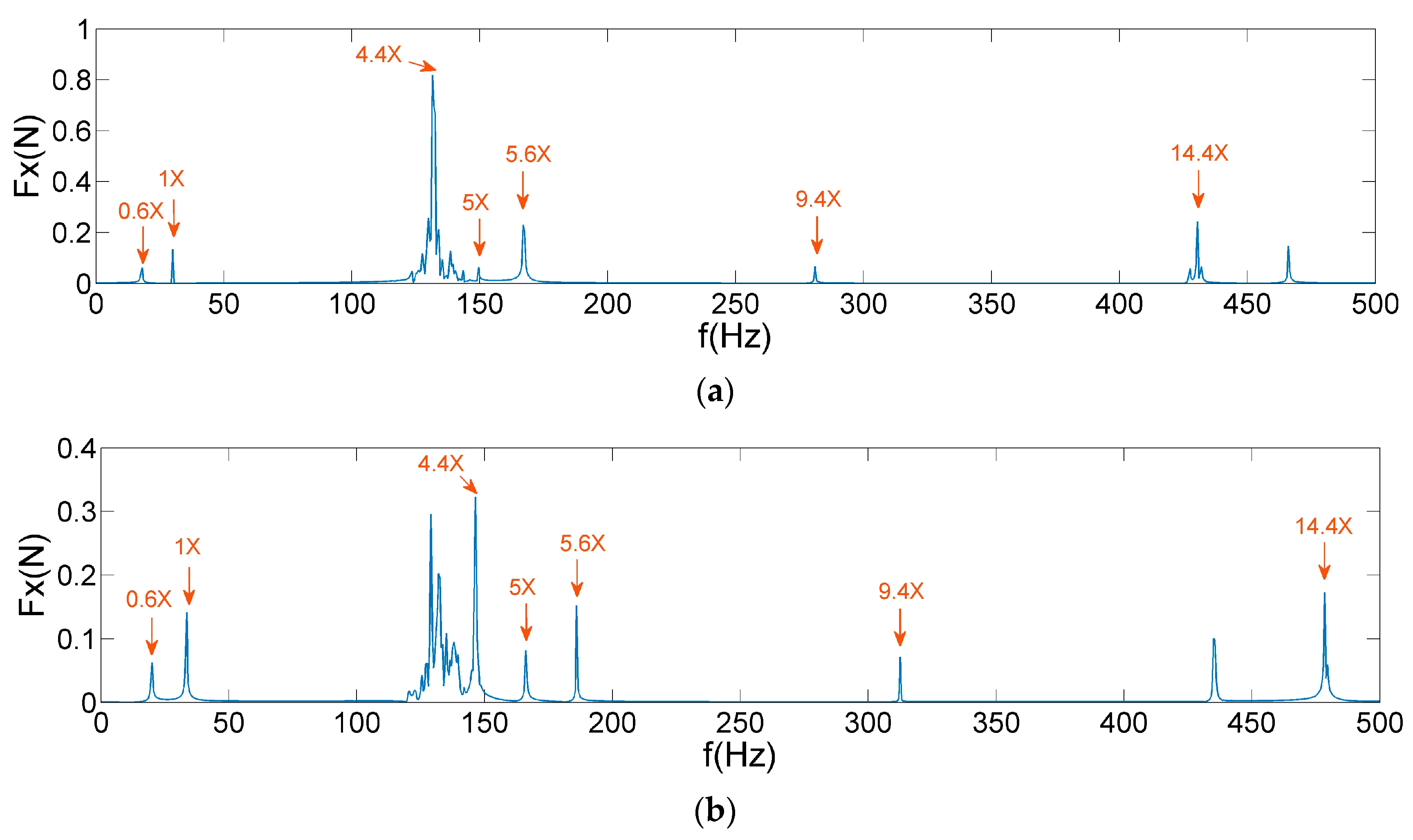
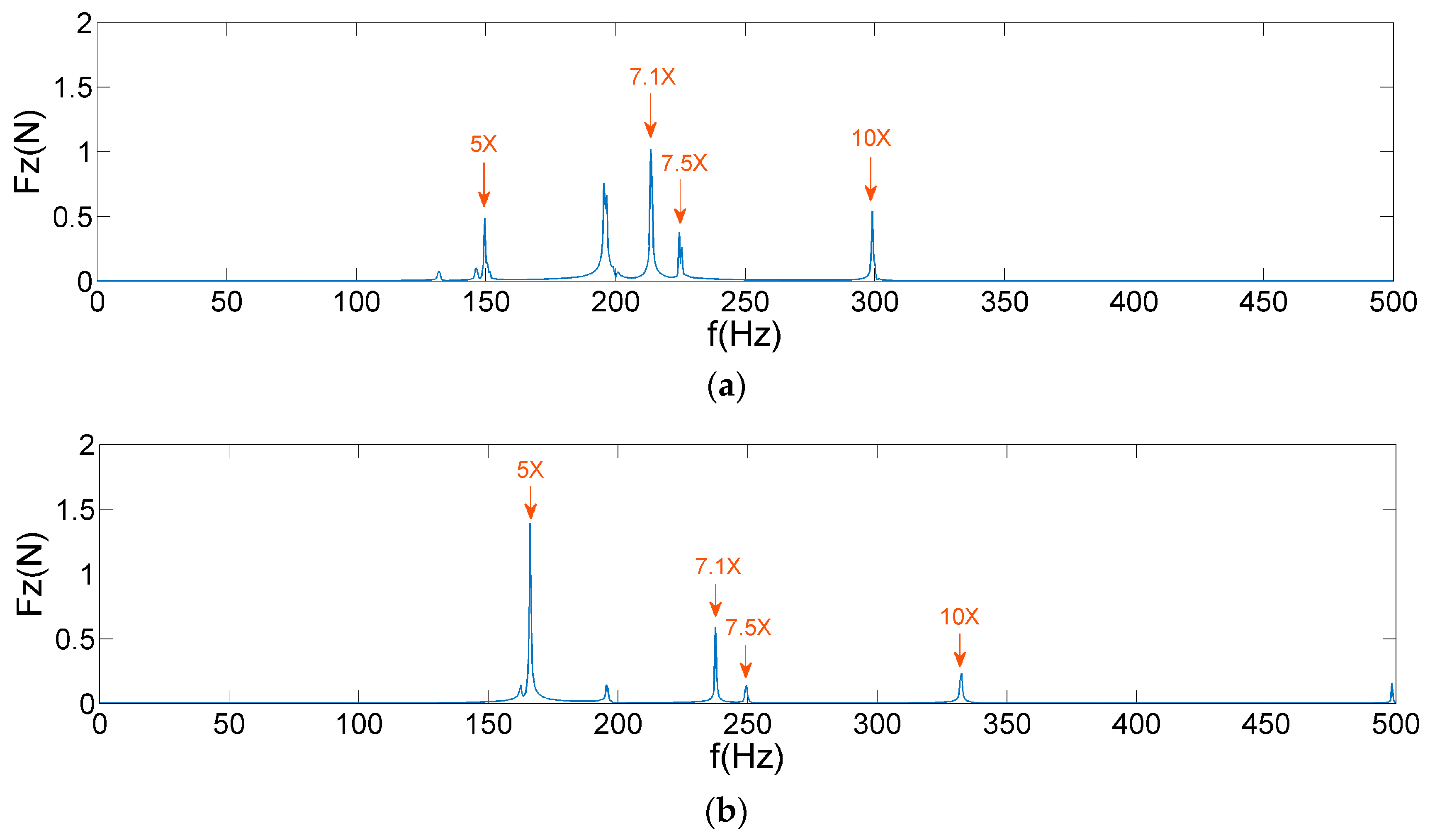
5.2. Analysis of Micro-Vibration Denoising
6. Conclusions
- (1)
- In the signal processing of SVD based on Hankel matrix, the energy of the singular values is maximum when the matrix structure is a square or an approximate square. Currently, the feature components provide the largest degree of distinction, which is convenient for the order determination of the effective singular values.
- (2)
- The method of order determination based on the AIC possesses high accuracy and robustness. Furthermore, AIC–SVD is significantly better than WTD and EMD–SG in the denoising performance for the signals containing Gaussian white noise.
- (3)
- In the micro-vibration signal pre-processing of reaction wheels, AIC–SVD achieves a reasonable denoising effect for the signals containing Gaussian white noise and colored noise. This solves the problem of over-denoising and under-denoising caused by inappropriate parameter selection and modal resonance factor. The proposed method has strong adaptability to vibration signal processing under different working conditions, which is beneficial in the extraction of harmonic features.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhao, M.; Jia, X.; Lin, J.; Lei, Y.; Lee, J. Instantaneous speed jitter detection via encoder signal and its application for the diagnosis of planetary gearbox. Mech. Syst. Signal. Process. 2018, 98, 16–31. [Google Scholar] [CrossRef]
- Wei, Y.; Li, Y.; Xu, M.; Huang, W. A review of early fault diagnosis approaches and their applications in rotating machinery. Entropy 2019, 21, 409. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, Y.; He, S.; Jiang, Z. Bearing fault diagnosis based on variational mode decomposition and total variation denoising. Meas. Sci. Technol. 2016, 27, 075101. [Google Scholar] [CrossRef]
- Yuan, J.; Wang, Y.; Peng, Y.; Wei, C. Weak fault detection and health degradation monitoring using customized standard multiwavelets. Mech. Syst. Signal. Process. 2017, 94, 384–399. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Smith, J.S. The local mean decomposition and its application to EEG perception data. J. R. Soc. Interface 2005, 2, 443–454. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Beenamol, M.; Prabavathy, S.; Mohanalin, J. Wavelet based seismic signal de-noising using Shannon and Tsallis entropy. Comput. Math. Appl. 2012, 64, 3580–3593. [Google Scholar] [CrossRef]
- Ahn, J.-H.; Kwak, D.-H.; Koh, B.-H. Fault detection of a roller-bearing system through the EMD of a wavelet denoised signal. Sensors 2014, 14, 15022–15038. [Google Scholar] [CrossRef]
- Lu, N.; Xiao, Z.; Malik, O. Feature extraction using adaptive multiwavelets and synthetic detection index for rotor fault diagnosis of rotating machinery. Mech. Syst. Signal. Process. 2015, 52, 393–415. [Google Scholar] [CrossRef]
- He, Q.; Wang, X.; Zhou, Q. Vibration sensor data denoising using a time-frequency manifold for machinery fault diagnosis. Sensors 2014, 14, 382–402. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Ye, B. Similarity of signal processing effect between Hankel matrix-based SVD and wavelet transform and its mechanism analysis. Mech. Syst. Signal. Process. 2009, 23, 1062–1075. [Google Scholar] [CrossRef]
- Boudraa, A.-O.; Cexus, J.-C. Denoising via empirical mode decomposition. Proc. IEEE ISCCSP 2006, 4, 2006. [Google Scholar]
- Kang, M.; Kim, J.-M. Singular value decomposition based feature extraction approaches for classifying faults of induction motors. Mech. Syst. Signal. Process. 2013, 41, 348–356. [Google Scholar] [CrossRef]
- Wang, S.; Chen, X.; Cai, G.; Chen, B.; Li, X.; He, Z. Matching demodulation transform and synchrosqueezing in time-frequency analysis. IEEE Trans. Signal. Process. 2013, 62, 69–84. [Google Scholar] [CrossRef]
- Hao, Y.; Song, L.; Ke, Y.; Wang, H.; Chen, P. Diagnosis of compound fault using sparsity promoted-based sparse component analysis. Sensors 2017, 17, 1307. [Google Scholar] [CrossRef]
- Beltrami, E. Sulle funzioni bilineari. In Giornale di Matematiche ad Uso degli Studenti Delle Università Italiane; Battaglini, G., Fergola, E., Eds.; Libreria Scientifica e Industriale: Naples, Italy, 1873; Volume 11, pp. 98–106. [Google Scholar]
- Lilly, B.; Paliwal, K. Robust Speech Recognition Using Singular Value Decomposition Based Speech Enhancement. In Proceedings of the IEEE TENCON’97 Brisbane-Australia, Region 10 Annual Conference, Speech and Image Technologies for Computing and Telecommunications (Cat. No. 97CH36162). Brisbane, Queensland, Australia, 4 December 1997; pp. 257–260. [Google Scholar]
- Samraj, A.; Sayeed, S.; Raja, J.E.; Hossen, J.; Rahman, A. Dynamic clustering estimation of tool flank wear in turning process using SVD models of the emitted sound signals. World Acad. Sci. Eng. Technol. 2011, 80, 1322–1326. [Google Scholar]
- Sadek, R.A. SVD based image processing applications: State of the art, contributions and research challenges. Int. J. Adv. Comput. Sci. Appl. 2012, 3, 26–34. [Google Scholar]
- Liu, T.; Chen, J.; Dong, G. Singular spectrum analysis and continuous hidden Markov model for rolling element bearing fault diagnosis. J. Vib. Control. 2015, 21, 1506–1521. [Google Scholar] [CrossRef]
- Shi, J.; Liang, M.; Guan, Y. Bearing fault diagnosis under variable rotational speed via the joint application of windowed fractal dimension transform and generalized demodulation: A method free from prefiltering and resampling. Mech. Syst. Signal. Process. 2016, 68, 15–33. [Google Scholar] [CrossRef]
- Han, T.; Jiang, D.; Zhang, X.; Sun, Y. Intelligent diagnosis method for rotating machinery using dictionary learning and singular value decomposition. Sensors 2017, 17, 689. [Google Scholar] [CrossRef] [PubMed]
- Yang, W.-X.; Tse, P.W. Development of an advanced noise reduction method for vibration analysis based on singular value decomposition. NDT E Int. 2003, 36, 419–432. [Google Scholar] [CrossRef]
- Golafshan, R.; Sanliturk, K.Y. SVD and Hankel matrix based de-noising approach for ball bearing fault detection and its assessment using artificial faults. Mech. Syst. Signal. Process. 2016, 70, 36–50. [Google Scholar] [CrossRef]
- Zhao, M.; Jia, X. A novel strategy for signal denoising using reweighted SVD and its applications to weak fault feature enhancement of rotating machinery. Mech. Syst. Signal. Process. 2017, 94, 129–147. [Google Scholar] [CrossRef]
- Zhao, X.; Ye, B. The Similarity of Signal Processing Effect between SVD and Wavelet Transform and Its Mechanism Analysis. Acta Electron. Sin. 2008, 36, 1582–1589. [Google Scholar]
- Jiang, H.; Chen, J.; Dong, G.; Liu, T.; Chen, G. Study on Hankel matrix-based SVD and its application in rolling element bearing fault diagnosis. Mech. Syst. Signal Process. 2015, 52, 338–359. [Google Scholar] [CrossRef]
- Zhao, X.Z.; Ye, B.Y.; Chen, T.-J.A. Influence of Matrix Creation Way on Signal Processing Effect of Singular Value Decomposition. J. South. China Univ. Technol. (Nat. Sci. Ed.) 2008, 36, 86–93. (In Chinese) [Google Scholar]
- Zhao, X.Z.; Ye, B.Y.; Chen, T.-J.A. Selection of Effective Singular Values Based on Curvature Spectrum of Singular Values. J. South. China Univ. Technol. (Nat. Sci. Ed.) 2010, 38, 11–18, 23. (In Chinese) [Google Scholar]
- Zhao, X.; Ye, B. Selection of effective singular values using difference spectrum and its application to fault diagnosis of headstock. Mech. Syst. Signal. Process. 2011, 25, 1617–1631. [Google Scholar] [CrossRef]
- Li, Z.; Li, W.; Zhao, X. Feature frequency extraction based on singular value decomposition and its application on rotor faults diagnosis. J. Vib. Control. 2019, 25, 1246–1262. [Google Scholar] [CrossRef]
- Zhang, X.; Tang, J.; Zhang, M.; Ji, Q. Noise subspaces subtraction in SVD based on the difference of variance values. J. Vibroeng. 2016, 18, 4852–4861. [Google Scholar]
- Akaike, H. A new look at the statistical model identification. IEEE Trans. Autom. Control. 1974, 19, 716–723. [Google Scholar] [CrossRef]
- Cheng, W.; Lee, S.; Zhang, Z.; He, Z. Independent component analysis based source number estimation and its comparison for mechanical systems. J. Sound Vib. 2012, 331, 5153–5167. [Google Scholar] [CrossRef]
- Geng, Y.; Zhao, X. Optimization of Morlet wavelet scale based on energy spectrum of singular values. J. Vib. Shock 2015, 34, 133–139. [Google Scholar]
- Ma, N.; Goh, J.T. Efficient Method to Determine Diagonal Loading Value. In Proceedings of the 2003 IEEE ICASSP’03 International Conference on Acoustics, Speech, and Signal Processing, Hongkong, China, 6–10 April 2003; pp. V-341–V-344. [Google Scholar]
- Jin, T.; Li, Q.; Mohamed, M.A. A Novel Adaptive EEMD Method for Switchgear Partial Discharge Signal Denoising. IEEE Access 2019, 7, 58139–58147. [Google Scholar] [CrossRef]
- Kim, D.-K. Micro-vibration model and parameter estimation method of a reaction wheel assembly. J. Sound Vib. 2014, 333, 4214–4231. [Google Scholar] [CrossRef]
- De Lellis, S.; Stabile, A.; Aglietti, G.; Richardson, G. A semiempirical methodology to characterise a family of microvibration sources. J. Sound Vib. 2019, 448, 1–18. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal | k | SV | AIC | Energy Ratio 1 | Valid Singular Spectrum | Error |
|---|---|---|---|---|---|---|
| s1 | 6 | 127.8 | 2.485 × 105 | 84.49% | 89.19% | 5.92% |
| s2 | 4 | 53.4 | 2.727 × 105 | 59.82% | 54.82% | 8.36% |
| s3 | 46 | 32.9 | 3.426 × 105 | 63.84% | 66.75% | 4.56% |
| Evaluation Parameters | WTD | EMD–SG | AIC–SVD | ||||||
|---|---|---|---|---|---|---|---|---|---|
| s1 | s2 | s3 | s1 | s2 | s3 | s1 | s2 | s3 | |
| SNR | 31.548 | 7.196 | 19.007 | 34.548 | 9.908 | 18.334 | 51.407 | 38.295 | 23.496 |
| RMSE | 0.309 | 0.273 | 0.274 | 0.266 | 0.239 | 0.283 | 0.115 | 0.058 | 0.219 |
| NCC | 0.979 | 0.800 | 0.933 | 0.985 | 0.845 | 0.933 | 0.997 | 0.990 | 0.954 |
| CID | 100 | 21 | 65 | 128 | 35 | 60 | 447 | 657 | 103 |
| Computing time (s) | 0.9 | 1.2 | 1.4 | 3.6 | 2.5 | 2.4 | 3.7 | 2.7 | 2.7 |
| Disturbing Component | Speed (rpm) | k | Valid Singular Spectrum | Computing Time (s) | Harmonic Coefficient |
|---|---|---|---|---|---|
| Fx | 1800 | 442 | 94.9% | 436 | 0.6, 1, 4.4, 5, 5.6, 9.4, 14.4 |
| 2000 | 460 | 92.4% | 448 | ||
| Fz | 1800 | 422 | 99.3% | 444 | 5, 7.1, 7.5, 10 |
| 2000 | 498 | 98.9% | 450 | ||
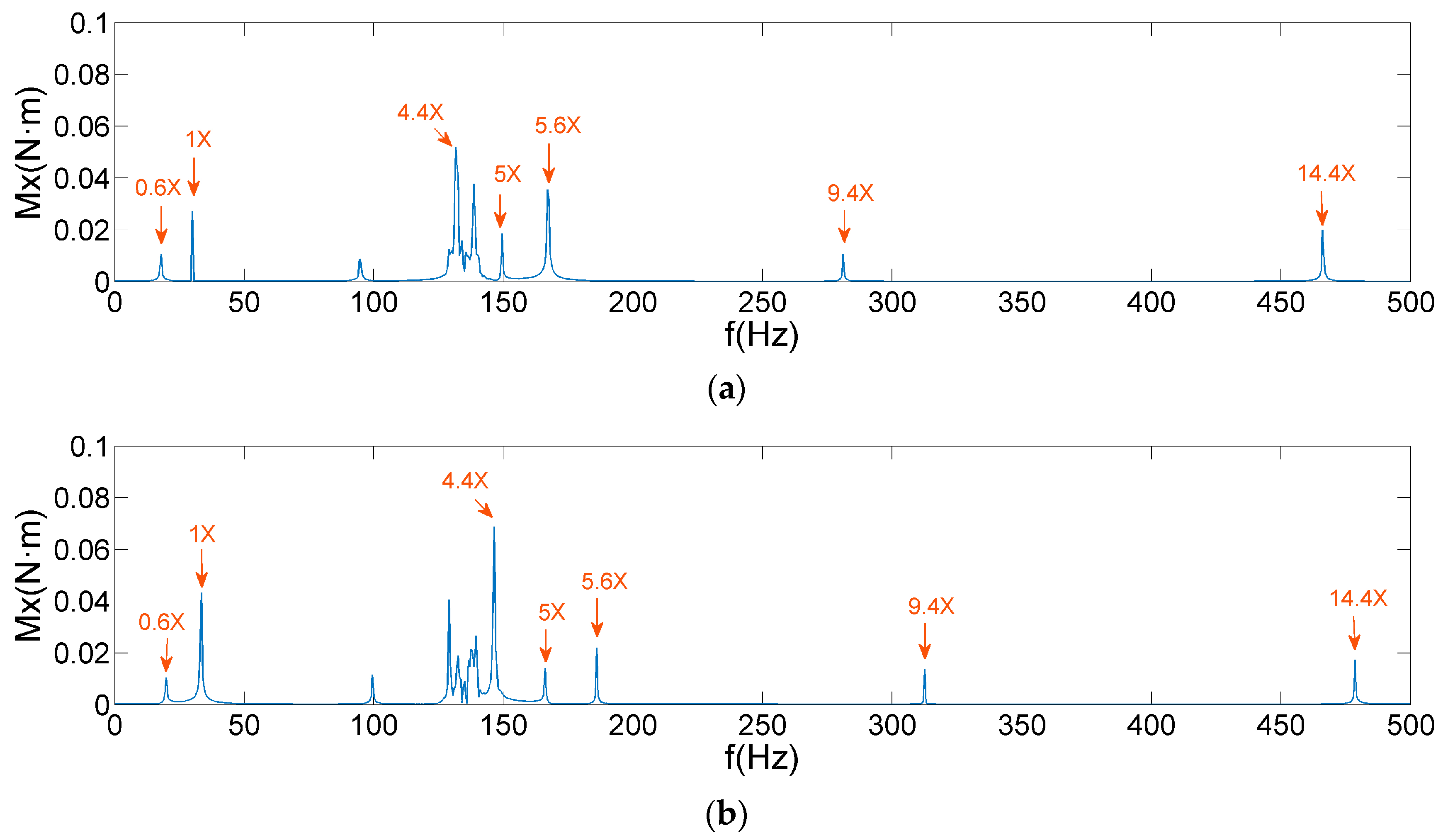
| Mx | 1800 | 64 | 86.7% | 440 | 0.6, 1, 4.4, 5, 5.6, 9.4, 14.4 |
| 2000 | 68 | 88.1% | 442 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, X.; Xu, Y.; Sheng, X.; Shen, Y. Signal Denoising Method Using AIC–SVD and Its Application to Micro-Vibration in Reaction Wheels. Sensors 2019, 19, 5032. https://doi.org/10.3390/s19225032
Yin X, Xu Y, Sheng X, Shen Y. Signal Denoising Method Using AIC–SVD and Its Application to Micro-Vibration in Reaction Wheels. Sensors. 2019; 19(22):5032. https://doi.org/10.3390/s19225032
Chicago/Turabian StyleYin, Xianbo, Yang Xu, Xiaowei Sheng, and Yan Shen. 2019. "Signal Denoising Method Using AIC–SVD and Its Application to Micro-Vibration in Reaction Wheels" Sensors 19, no. 22: 5032. https://doi.org/10.3390/s19225032