Research on Dynamic Inertial Estimation Technology for Deck Deformation of Large Ships


Abstract
:1. Introduction
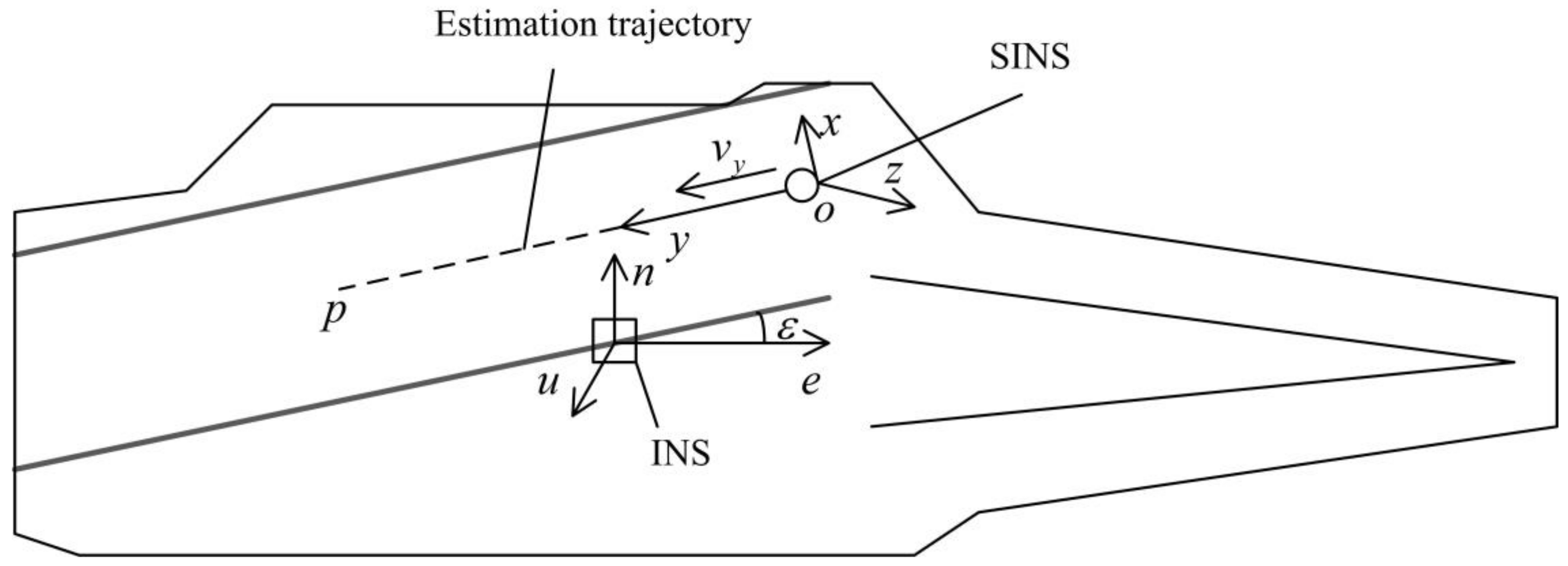
2. Principle of Dynamic Inertial Measurement Method
3. Estimation Models
3.1. Ship Benchmark Model
3.2. Sliding Estimation Model
4. Dynamic Filtering Algorithm
- Prediction:
- Correction:
- Kalman gain matrix:
- Prediction error variance matrix:
- Correction error variance matrix:
5. Deck Deformation Measurement Simulation
5.1. Parameter Setting
5.2. Results and Discussion
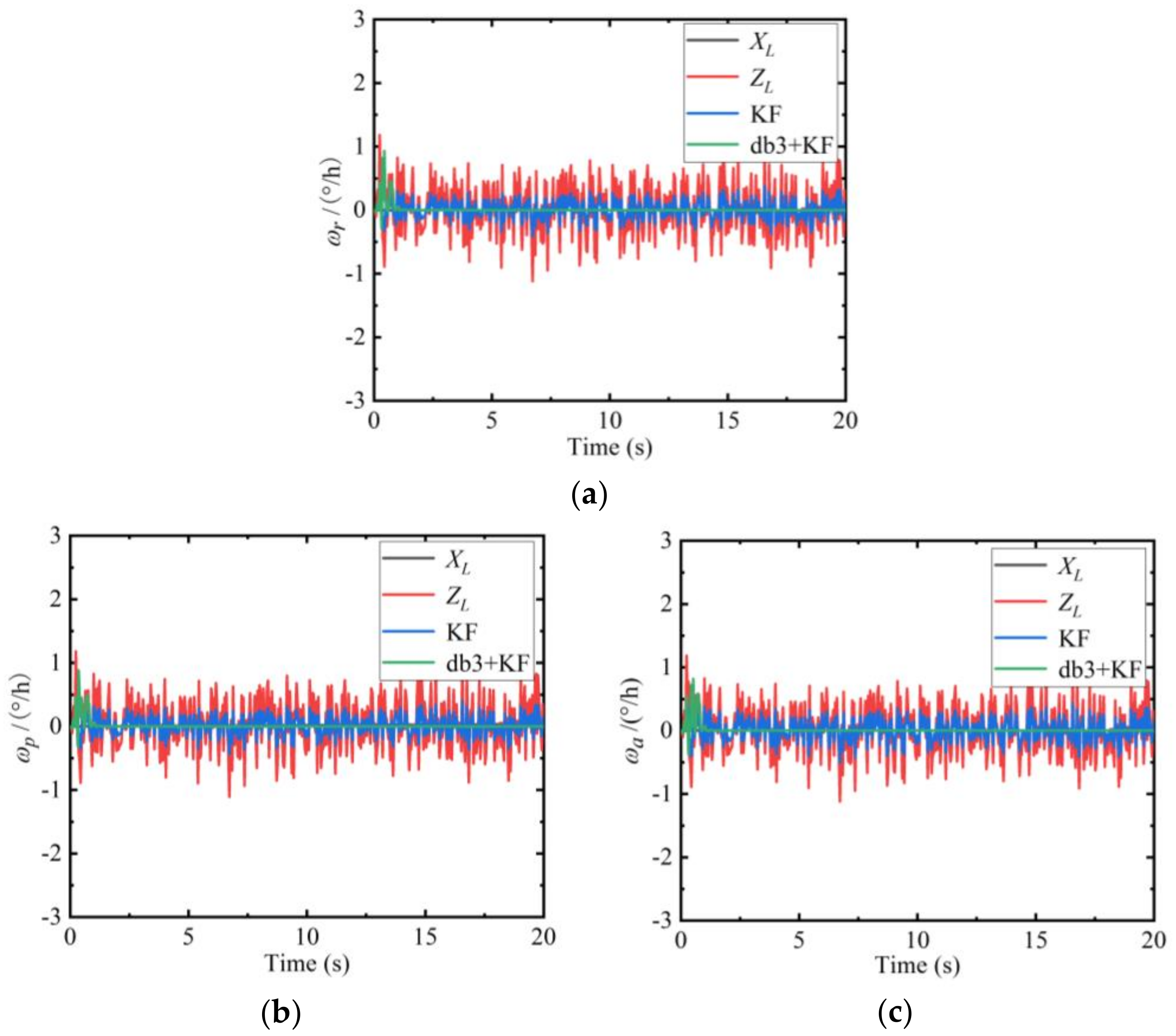
5.2.1. Simulation Results of the Ship Benchmark Model
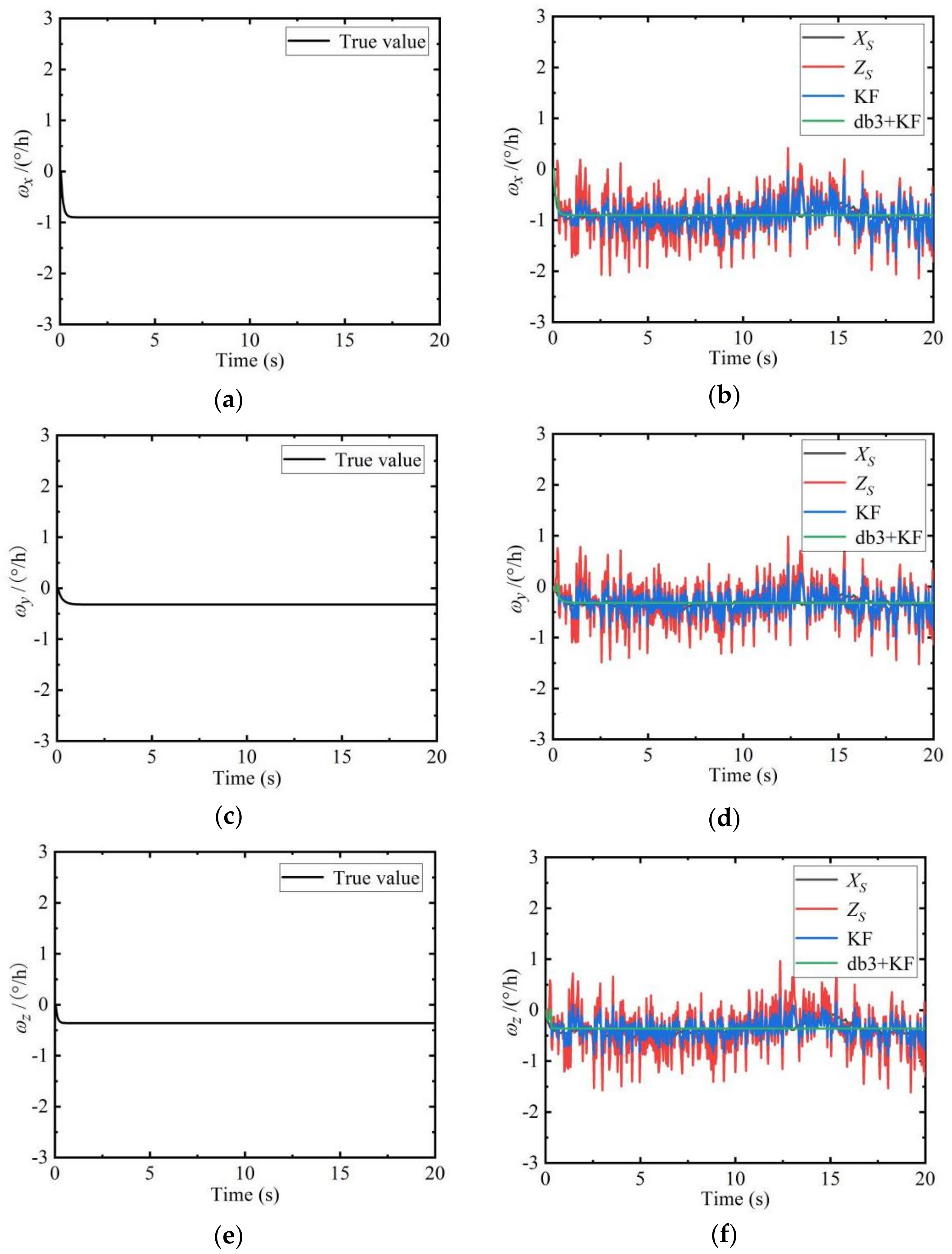
5.2.2. Simulation Results of the Sliding Estimation Model
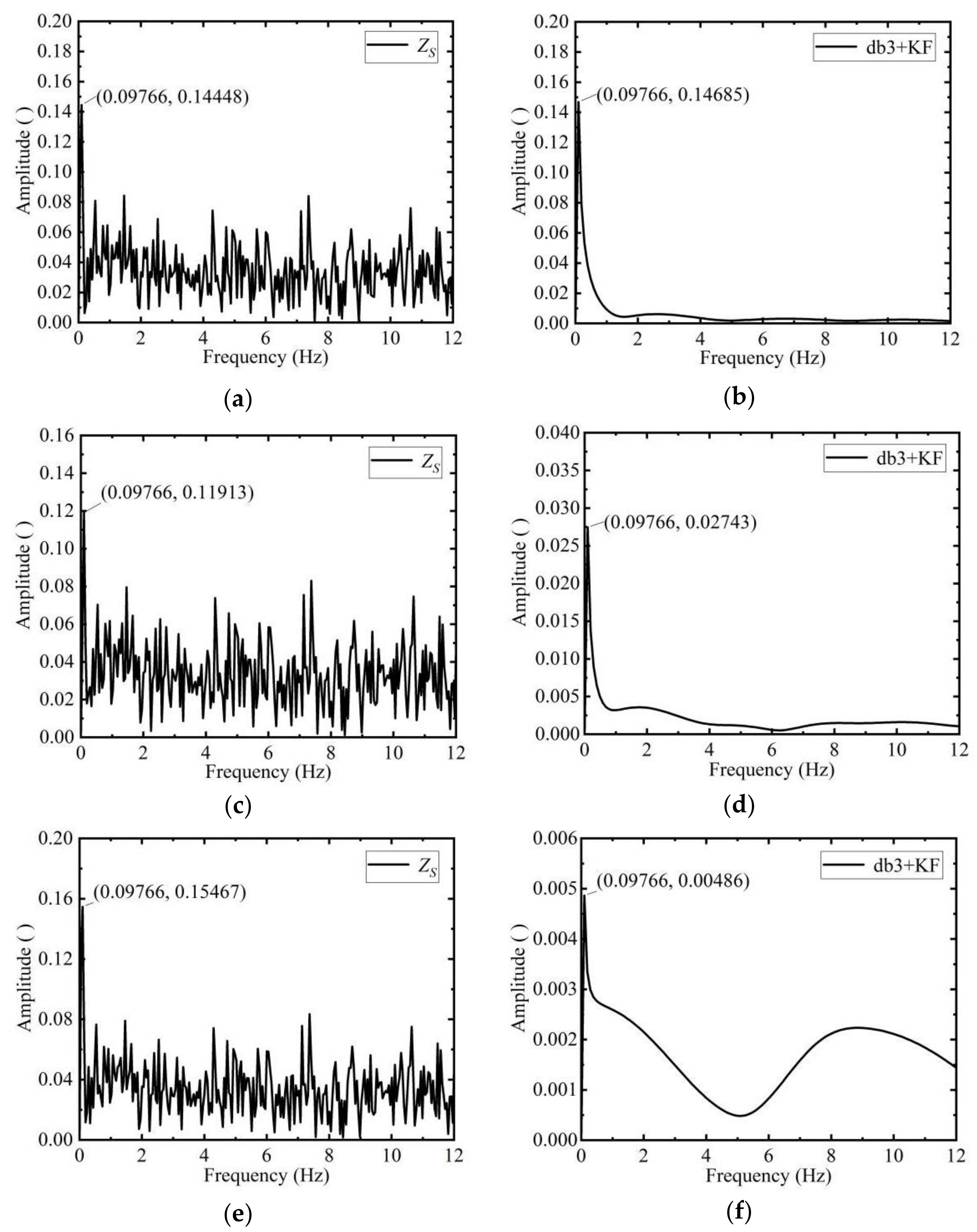
5.2.3. Curvature and Torsion of the Deck
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sun, F.; Guo, C.J.; Gao, W.; Li, B. A New Inertial Measurement Method of Ship Dynamic Deformation. In Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 3407–3412. [Google Scholar]
- Xu, B.; Chen, C.; Shi, H.Y.; Guo, Y. A time delay compensation method based on the hull deformation measurement technology by FGU. J. Ship Mech. 2015, 19, 1235–1244. [Google Scholar]
- Wang, B.; Xiao, X.; Xia, Y.Q.; Fu, M.Y. Unscented particle filtering for estimation of shipboard deformation based on inertial measurement units. Sensors 2013, 13, 15656–15672. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.B.; Sun, C.; Zhang, Y.Q.; Liu, X.M.; Liu, J.B.; Zhang, X.H.; Yu, Q.F. Hull deformation measurement for spacecraft TT&C ship by Photogrammetry. Sci. China Technol. Sci. 2015, 58, 1339–1347. [Google Scholar]
- Yuan, E.K.; Yang, G.L. High-Accuracy Modeling of Ship Deformation Based on Inertial Measuring Method. Adv. Mater. Res. 2013, 760, 1227–1232. [Google Scholar] [CrossRef]
- Zhu, Y.Z.; Wang, S.T.; Miu, L.J.; Ge, Y.S. Summary of Hull Deformation Measurement Technology. Ship Eng. 2007, 29, 58–61. [Google Scholar]
- Dai, H.D.; Lu, J.H.; Guo, W.; Wu, G.B.; Wu, X.N. IMU based deformation estimation about the deck of large ship. Opt.-Int. J. Light Electron Opt. 2016, 127, 3535–3540. [Google Scholar] [CrossRef]
- Wang, X.Q.; Chen, X.Y. Research on Inertial Measurement Method of Dynamic Deformation of Ship’s Deck. J. Chin. Inert. Technol. 2006, 14, 24–28. [Google Scholar]
- Jah, M.K.; Lisano, M.E.; Bom, G.H.; Axelrad, P. Mars Aerobraking Spacecraft State Estimation by Processing Inertial Measurement Unit Data. J. Guid. Control Dyn. 2015, 31, 1802–1812. [Google Scholar] [CrossRef]
- He, Y.; Zhang, X.L.; Peng, X.F. A Model-Free Hull Deformation Measurement Method Based on Attitude Quaternion Matching. Int. J. Distrib. Sens. Netw. 2018, 6, 8864–8869. [Google Scholar] [CrossRef]
- Xu, B.; Duan, T.H.; Wang, Y.F. An inertial measurement method of ship deformation based on IMM filtering. Opt.-Int. J. Light Electron Opt. 2017, 140, 601–609. [Google Scholar] [CrossRef]
- Gao, F.T.Z. Painted world famous weapon—1143.5 type “Kuznetsov” aircraft carrier . Opt.-Int. J. Light Electron Opt. 2010, 4, 76–81. [Google Scholar]
- Su, W.X.; Zhu, Y.L.; Liu, F.; Hu, K.Y. An online outlier detection method based on wavelet technique and robust rbf network. Trans. Inst. Meas. Control 2013, 35, 1046–1057. [Google Scholar] [CrossRef]
- Kepper, J.H.; Claus, B.C.; Kinsey, J.C. A Navigation Solution Using a MEMS IMU, Model-Based Dead-Reckoning, and One-Way-Travel-Time Acoustic Range Measurements for Autonomous Underwater Vehicles. IEEE J. Ocean. Eng. 2018, 44, 664–682. [Google Scholar]
- Schneider, A.M. Kalman Filter Formulations for Transfer Alignment of Strapdown Inertial Units. Navigation 1983, 30, 72–89. [Google Scholar] [CrossRef]
- Zhou, W.D.; Ding, G.Q.; Hao, Y.L.; Cui, G.Z. Research on the effect of ship’s deck deflection on angular rate matching based transfer alignment process. In Proceedings of the 2009 IEEE International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 3218–3222. [Google Scholar]
- Yang, Y.P.; Liu, Y.H.; Wang, Y.H.; Zhang, H.W.; Zhang, L.H. Dynamic modeling and motion control strategy for deep-sea hybrid-driven underwater gliders considering hull deformation and seawater density variation. Ocean Eng. 2017, 143, 66–78. [Google Scholar] [CrossRef]
- Lewiner, T.; Gomes, J.D.; Lopes, H.; Craizer, M. Curvature and torsion estimators based on parametric curve fitting. Comput. Graph. 2005, 29, 641–655. [Google Scholar] [CrossRef]
- Joo, H.K.; Yazaki, T.; Takezawa, M.; Maekawa, T. Differential geometry properties of lines of curvature of parametric surfaces and their visualization. Graph. Models 2014, 76, 224–238. [Google Scholar] [CrossRef]
- Bilen, C.; Huzurbazar, S. Wavelet-Based Detection of Outliers in Time Series. J. Comput. Graph. Stat. 2002, 11, 311–327. [Google Scholar] [CrossRef]
- El-Sheimy, N.; Nassar, S.; Noureldin, A. Wavelet De-Noising for IMU Alignment. IEEE Aerosp. Electron. Syst. Mag. 2004, 19, 32–39. [Google Scholar] [CrossRef]
- Armanious, G.; Lind, R. Fly-by-Feel Control of an Aeroelastic Aircraft Using Distributed Multirate Kalman Filtering. J. Guid. Control Dyn. 2017, 40, 2323–2329. [Google Scholar] [CrossRef]
- Xu, S.; Baldea, M.; Edgar, T.F.; Wojsznis, W.; Blevins, T.; Nixon, M. An improved methodology for outlier detection in dynamic datasets. AIChE J. 2015, 61, 419–433. [Google Scholar] [CrossRef]
- Nassar, S.; El-Sheimy, N. Wavelet analysis for improving INS and INS/DGPS navigation accuracy. J. Navig. 2005, 58, 119–134. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Axial | Parameter | Original Data | Filter Data (Wavelet Combined with Kalman Filter) |
|---|---|---|---|
| x | Mean | 0.9180 | 0.3812 |
| RMS | 1.0157 | 0.4036 | |
| y | Mean | 0.3271 | 0.1460 |
| RMS | 0.5328 | 0.1487 | |
| z | Mean | 0.3874 | 0.1974 |
| RMS | 0.5833 | 0.1981 |
| Parameter | Original Data | Filter Data (Wavelet) |
|---|---|---|
| Mean | 1.76 | 0.64 |
| RMS | 1.98 | 0.76 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, B.; Li, T.; Li, X. Research on Dynamic Inertial Estimation Technology for Deck Deformation of Large Ships. Sensors 2019, 19, 4167. https://doi.org/10.3390/s19194167
Ren B, Li T, Li X. Research on Dynamic Inertial Estimation Technology for Deck Deformation of Large Ships. Sensors. 2019; 19(19):4167. https://doi.org/10.3390/s19194167
Chicago/Turabian StyleRen, Bo, Tianjiao Li, and Xiang Li. 2019. "Research on Dynamic Inertial Estimation Technology for Deck Deformation of Large Ships" Sensors 19, no. 19: 4167. https://doi.org/10.3390/s19194167