Optimization of a New High Rotary Missile-Borne Stabilization Platform

 ,
,
Abstract
:1. Introduction
2. Working Principle of Passive Semi-Strapdown Roll Stabilized Platform
2.1. Composition and Working Principle of the Platform
2.2. The Dynamic Model of Passive Semi-Strapdown Roll Stabilized Platform
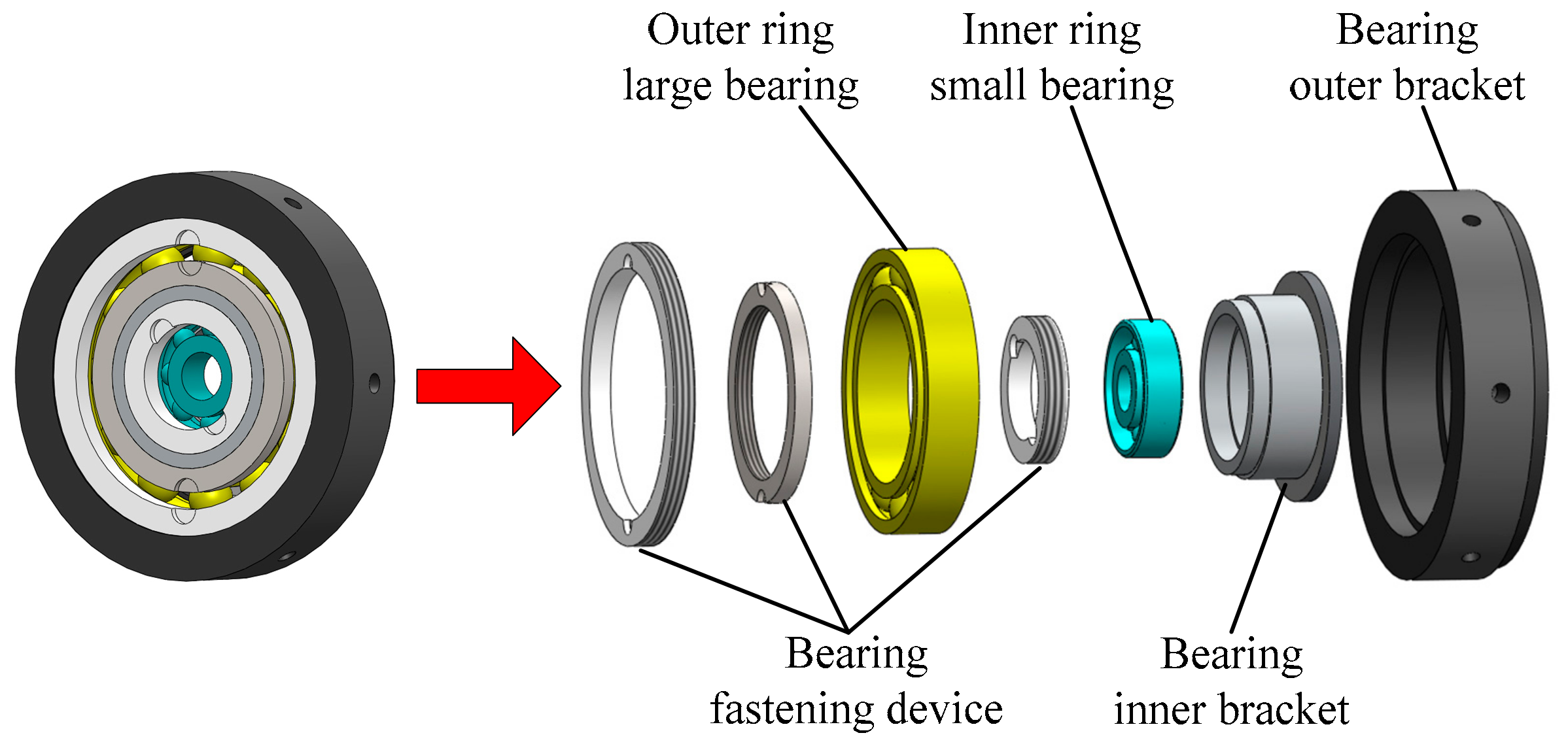
3. Improvement Principle of Bearing Device
4. Calculation Model of Friction Moment in Bearing
4.1. Calculation of the Traditional Signal Bearing Friction Moment
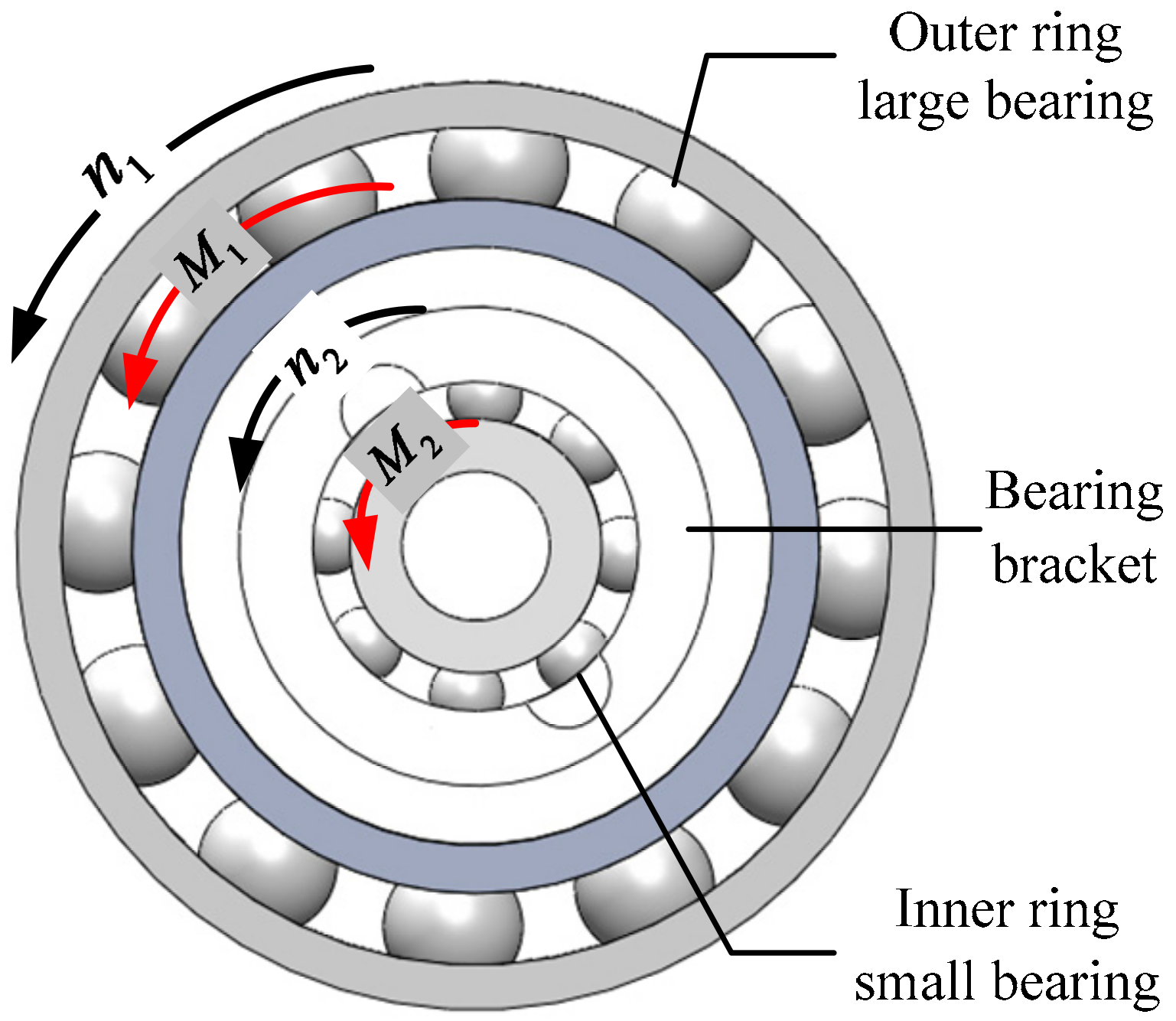
4.2. Establishment of a Calculation Model for the Friction Moment of a Bearing Nested Structure
4.3. Bearing Type Selection and Relevant Parameters
5. Simulation Verification
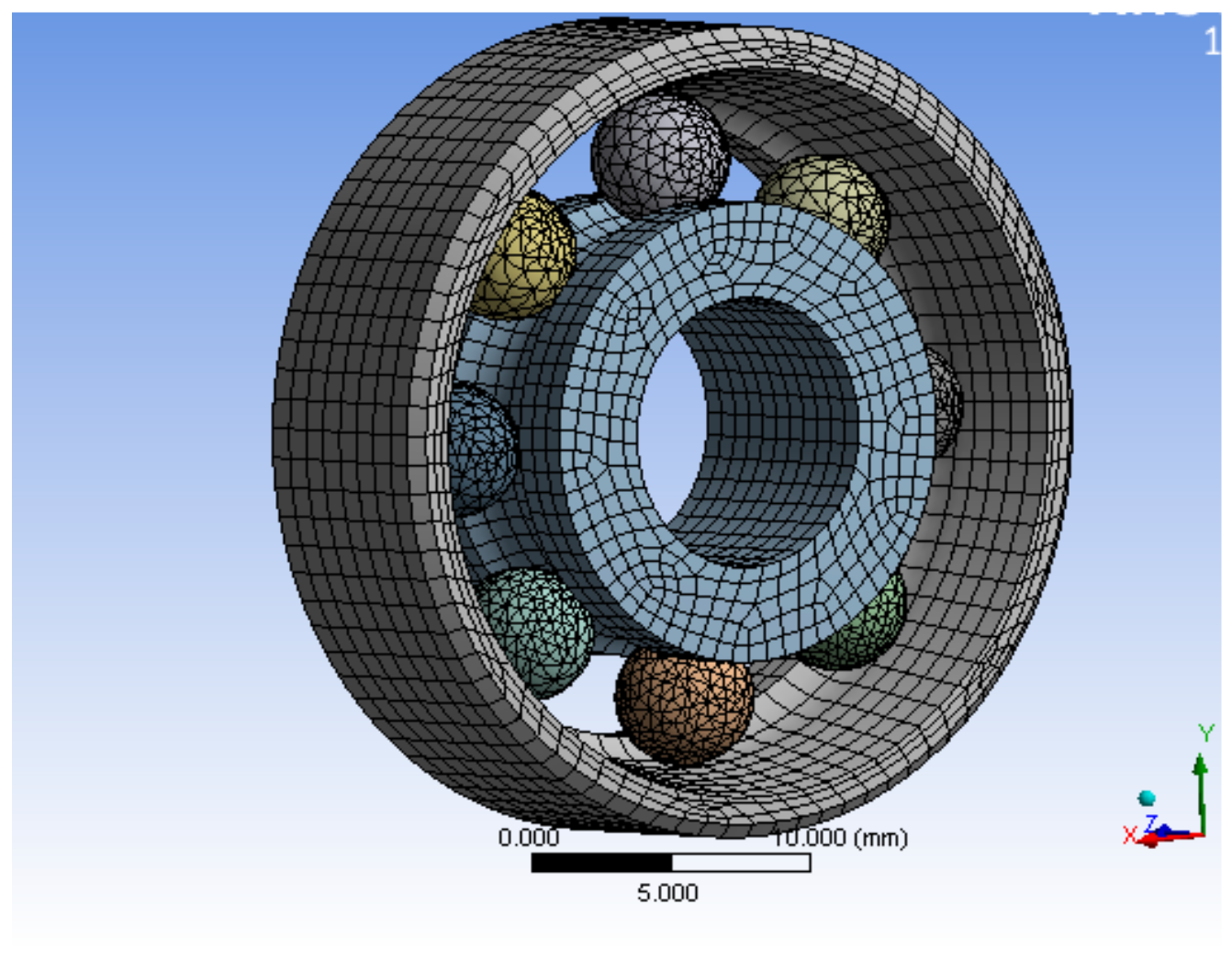
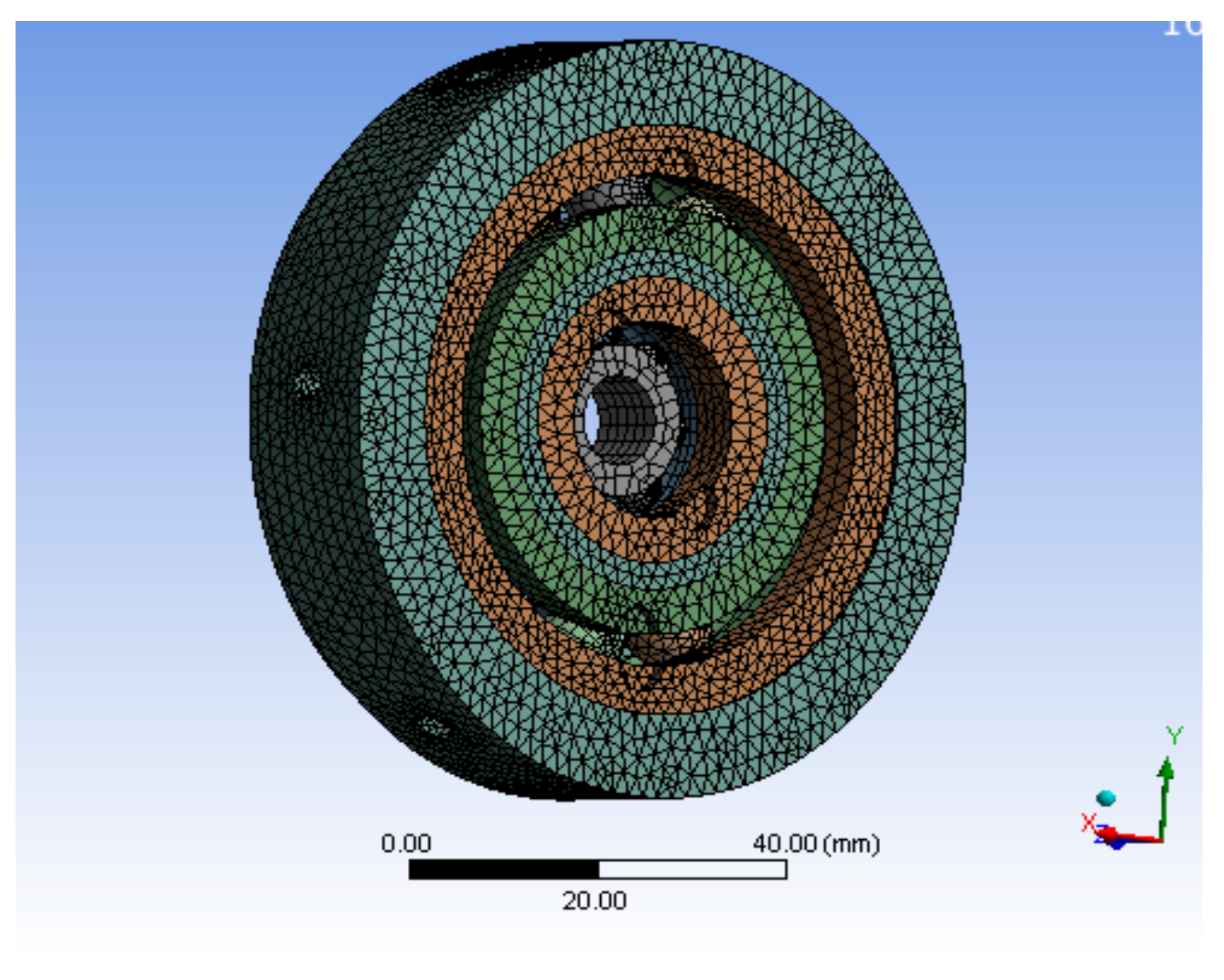
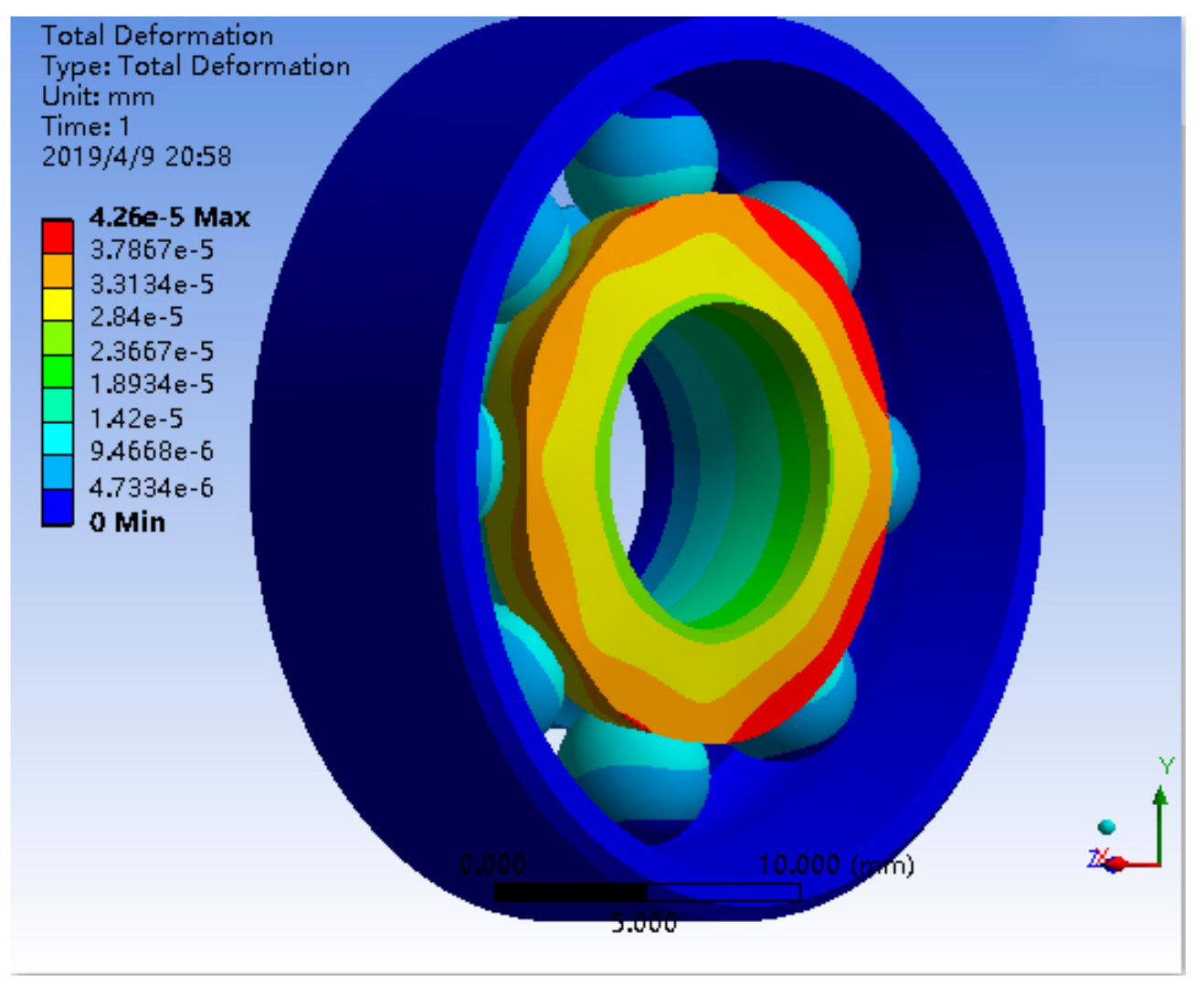
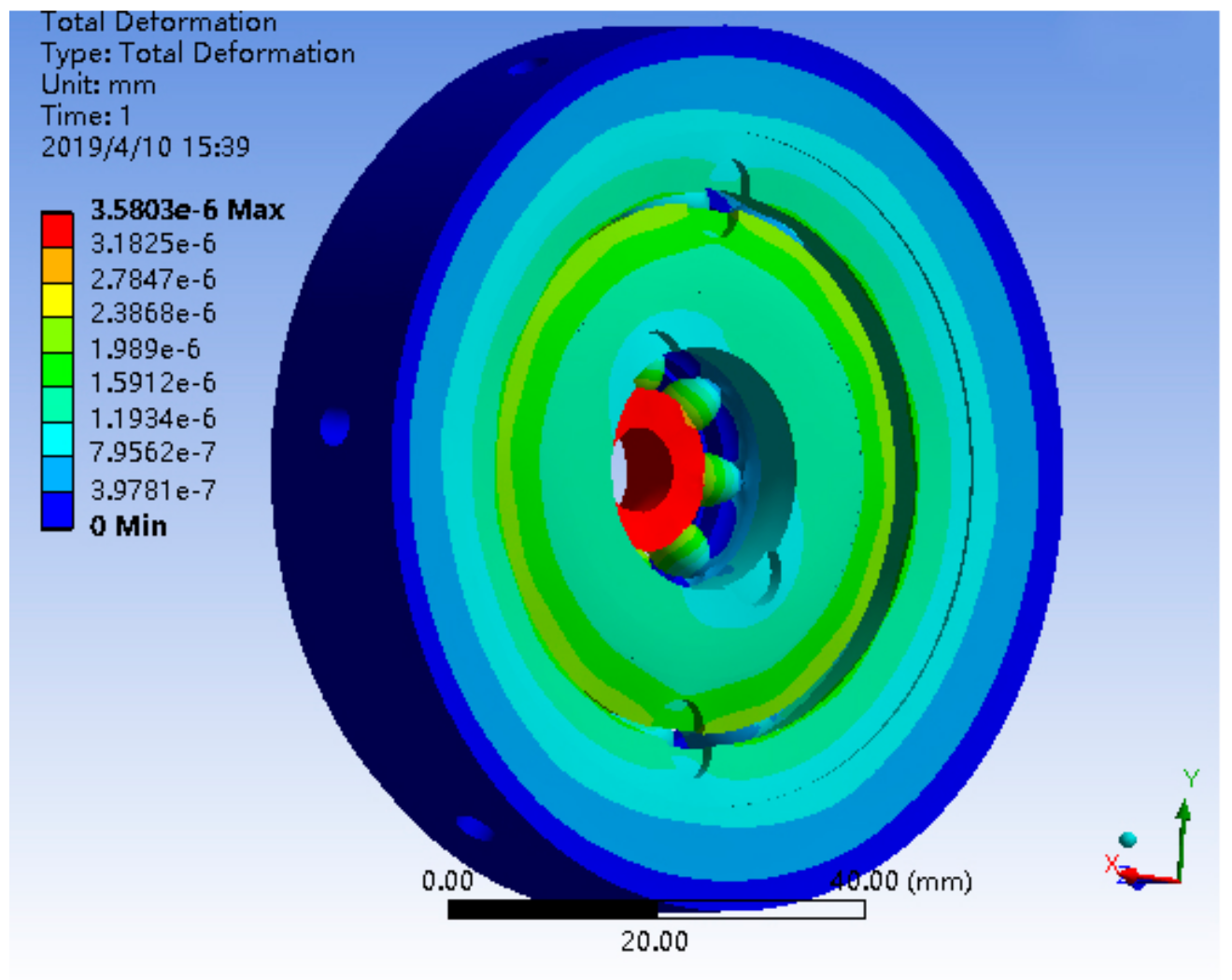
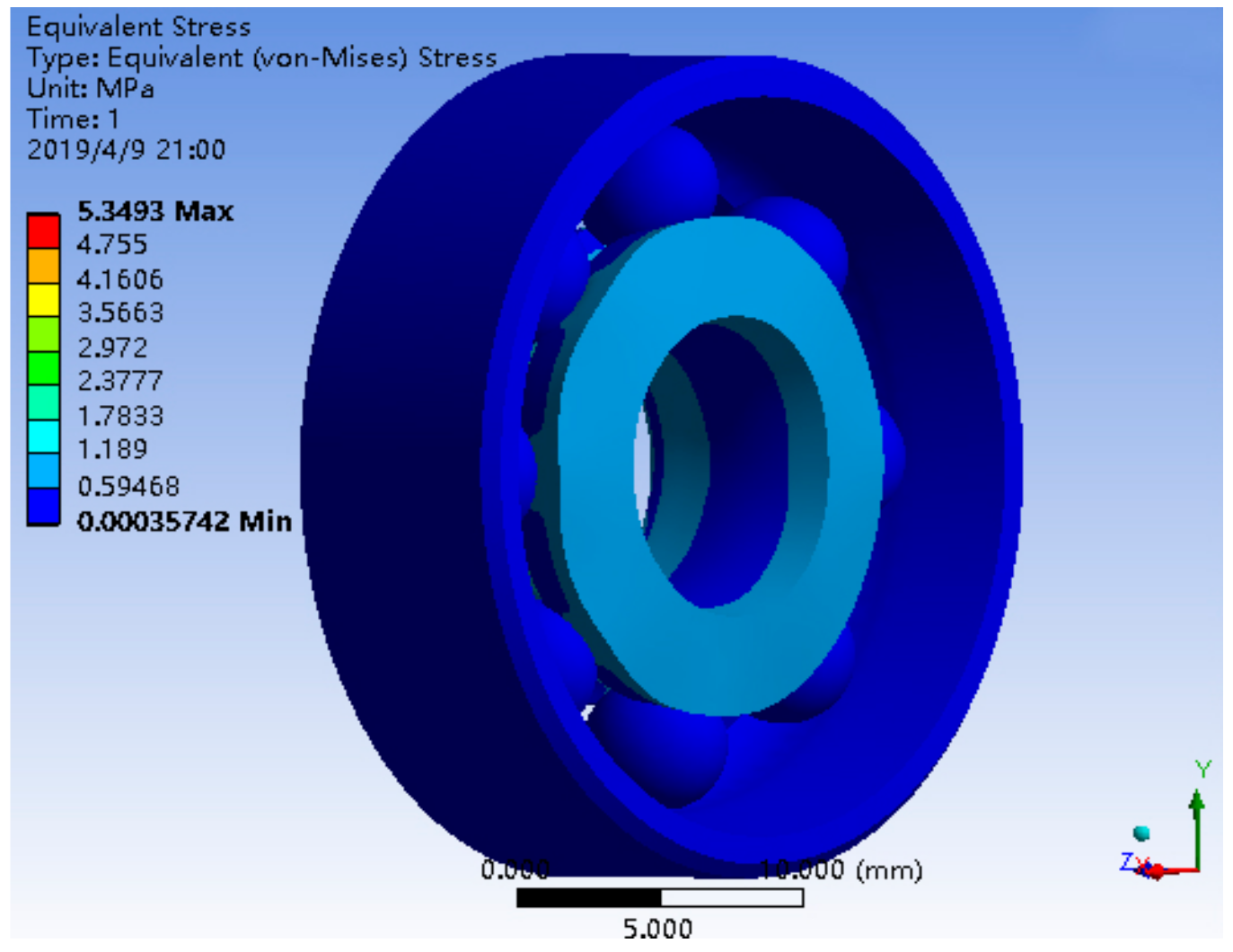
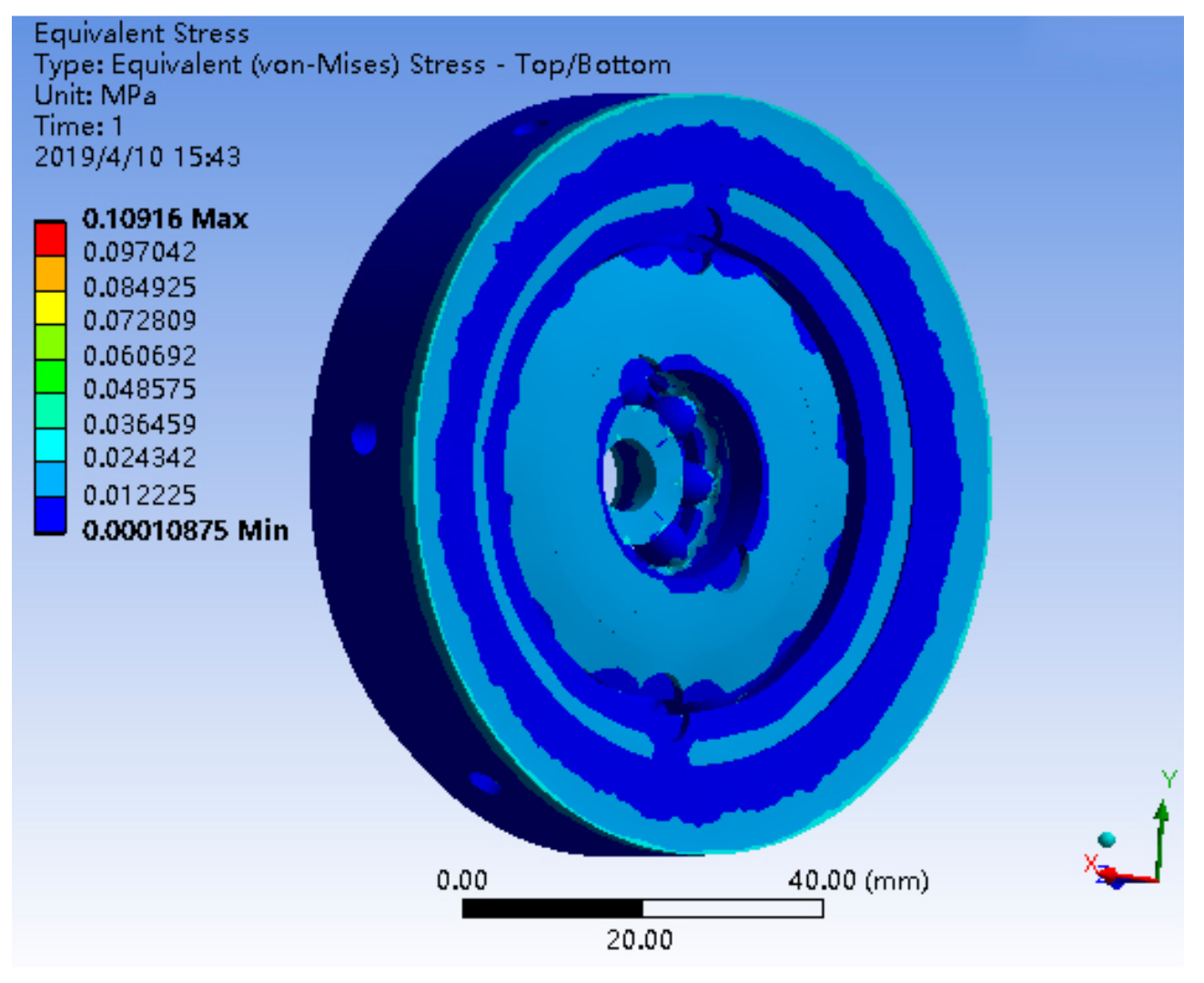
5.1. Axial Reliability Verification of the Bearing Nested Structure
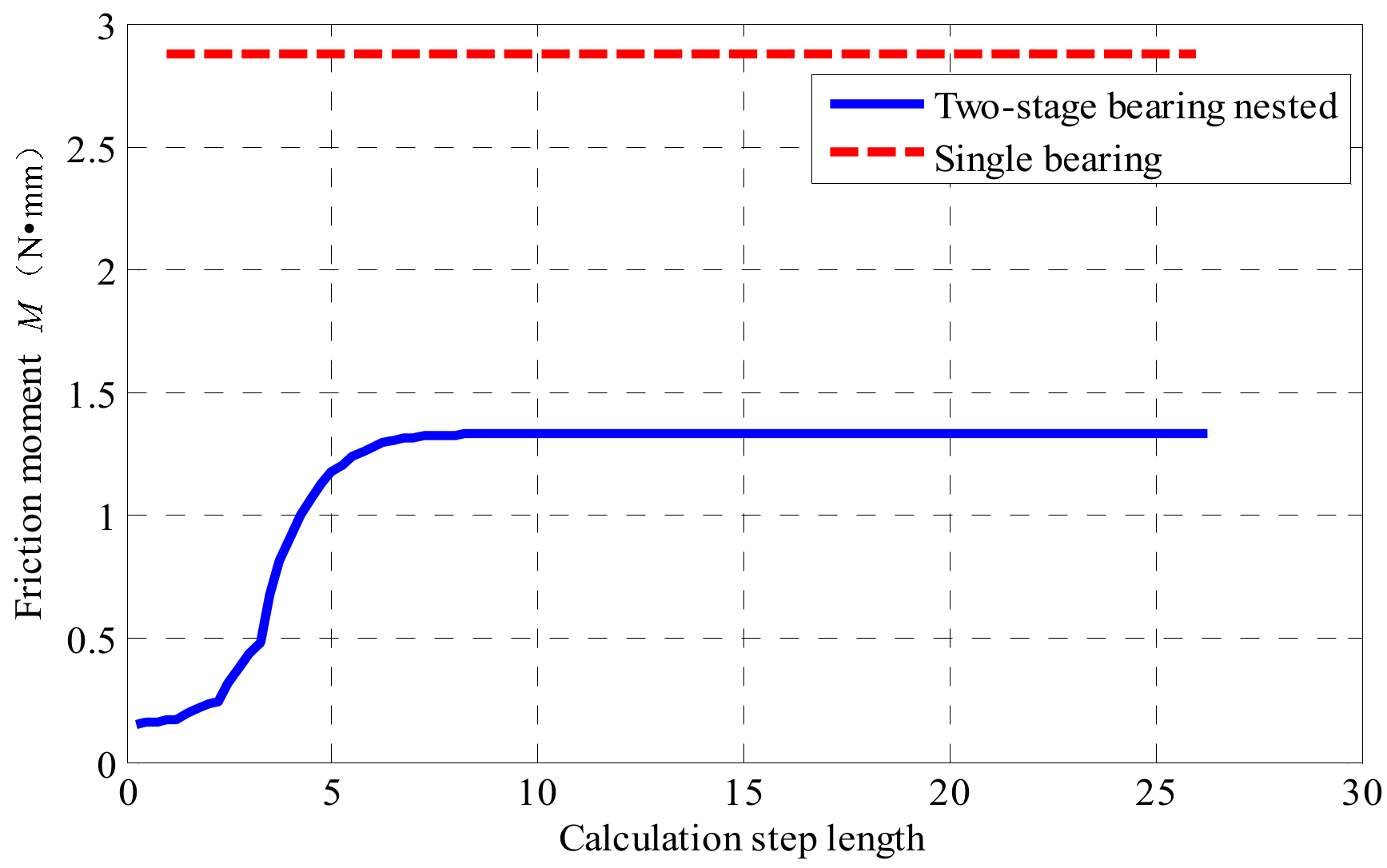
5.2. Calculation of the Theoretical Frictional Moment of a Bearing Nested Structure
6. Test Verification
6.1. Impact Test
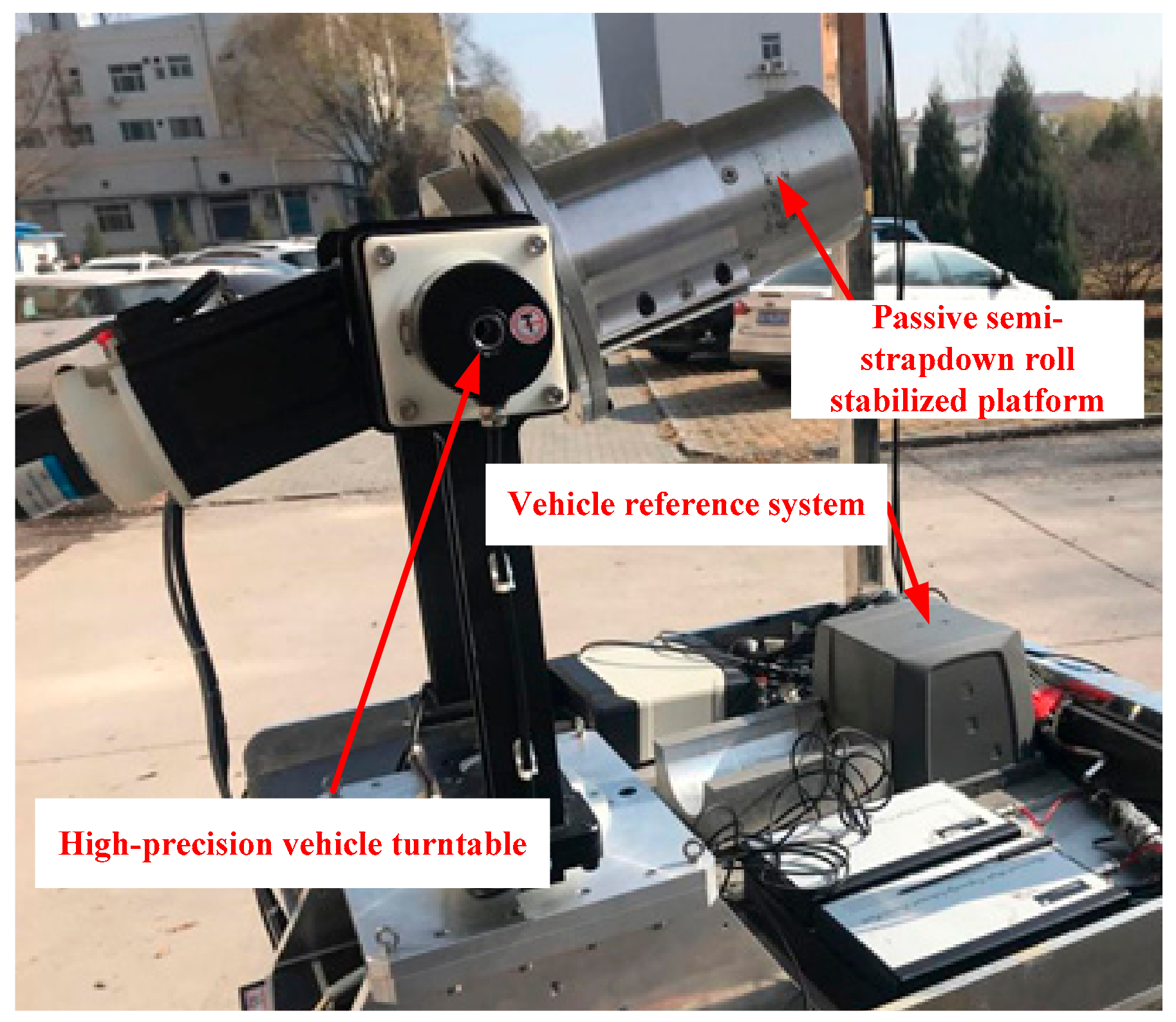
6.2. Vehicle Test
7. Conclusions
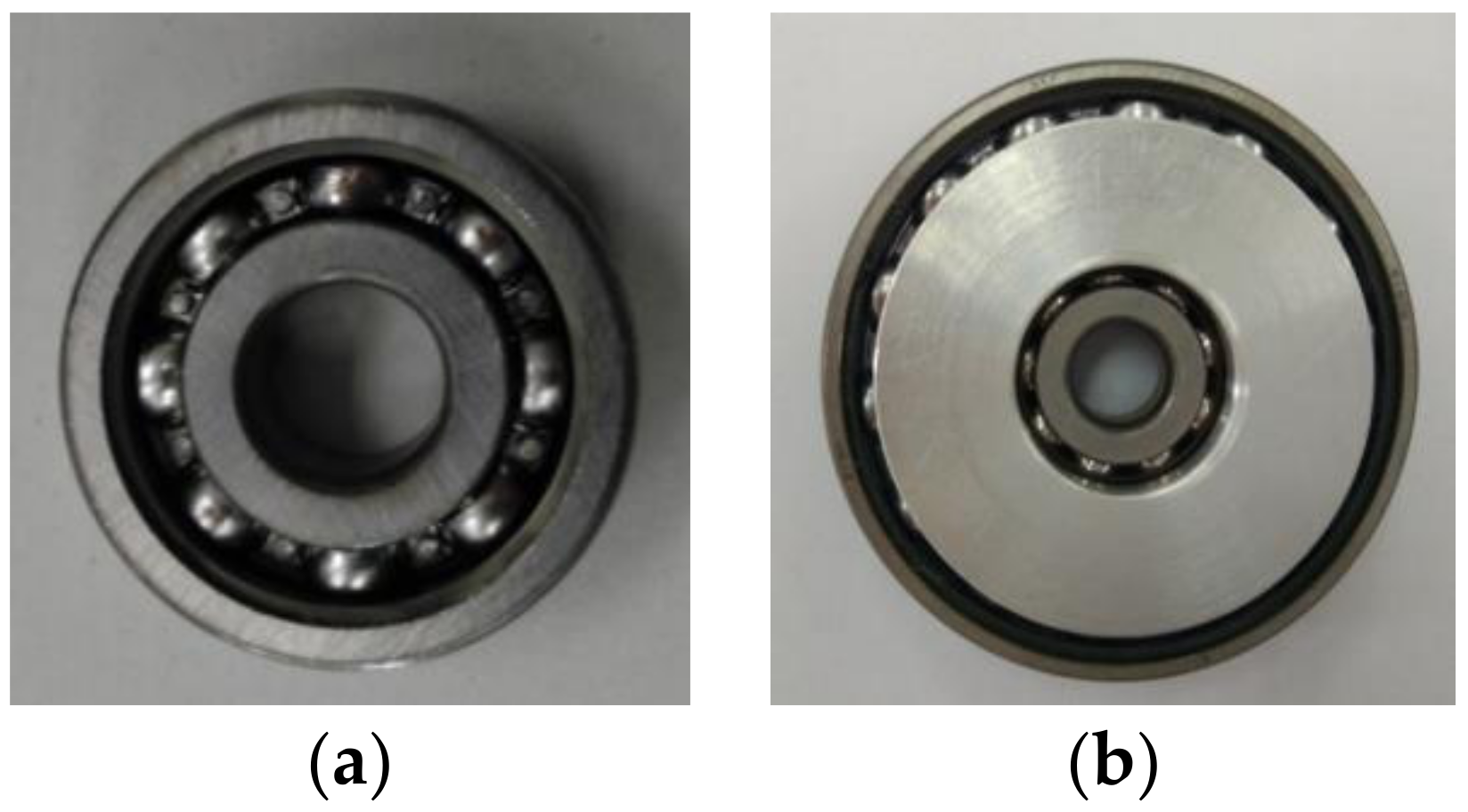
- Compared with the method of using only a single bearing, the scheme proposed in this paper has complementary advantages and can be better applied to the actual application environment Combining the large axial bearing capacity of angular contact ball bearings with the characteristic of the low cost and low friction coefficient of deep groove ball bearings to achieve the complementary advantages of bearing nested structure.
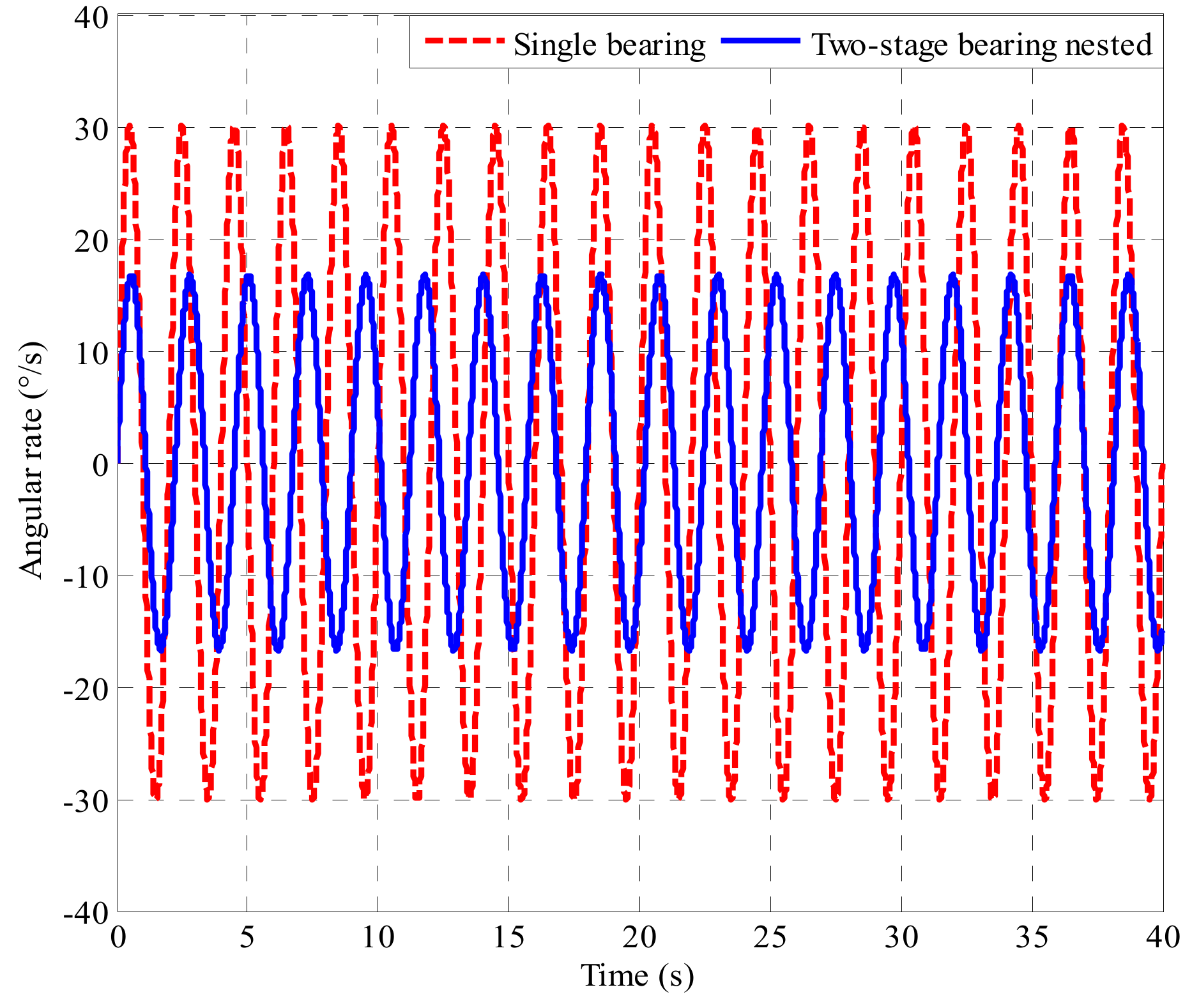
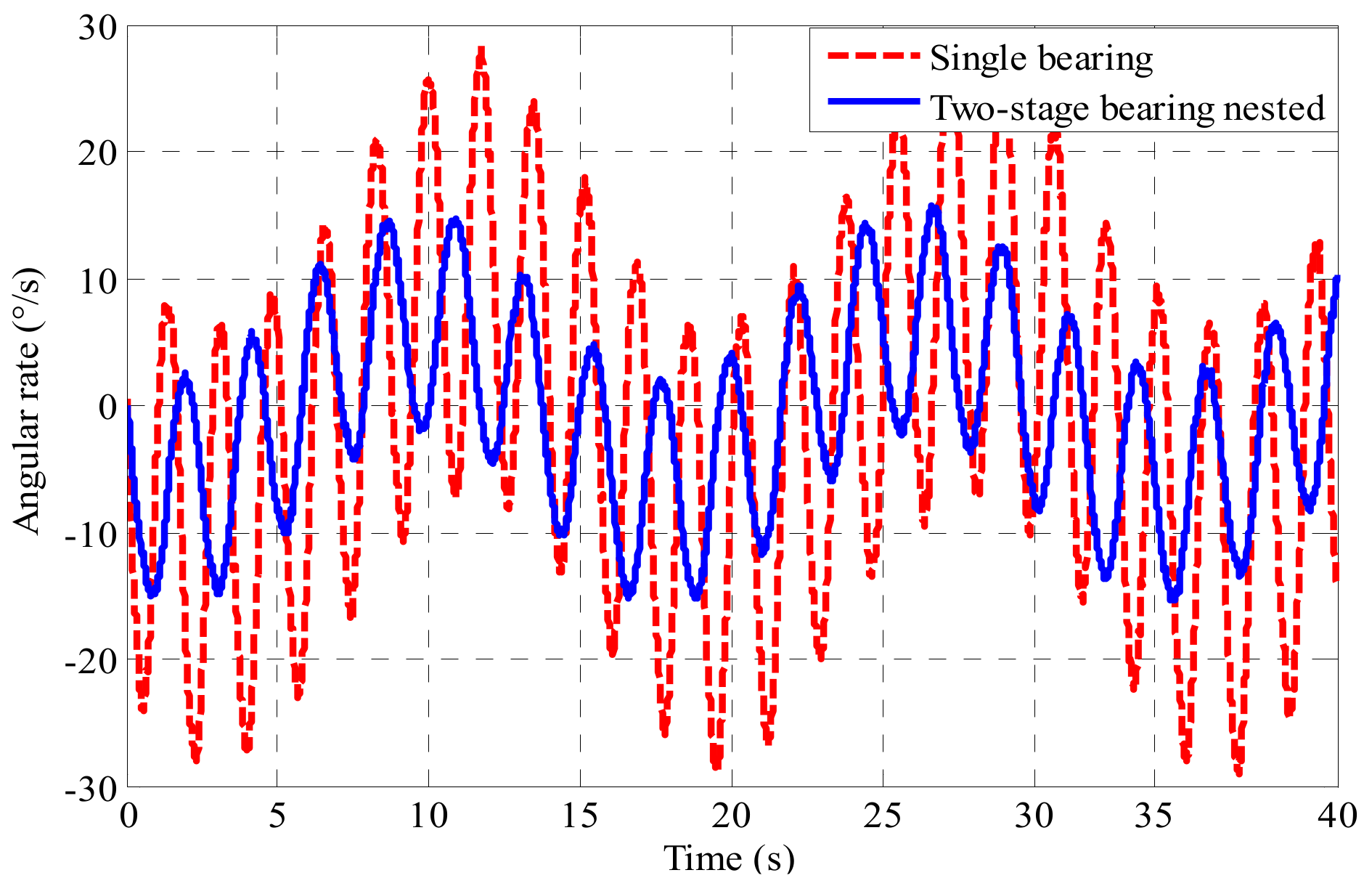
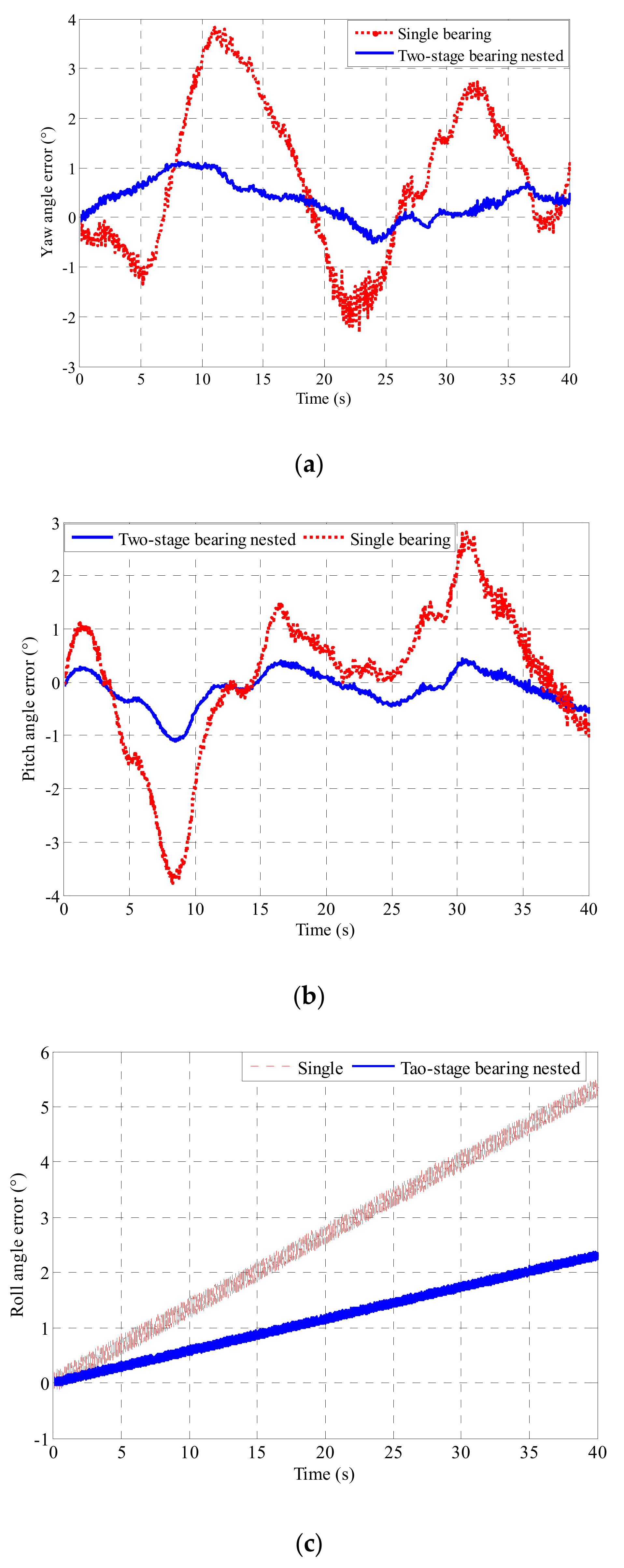
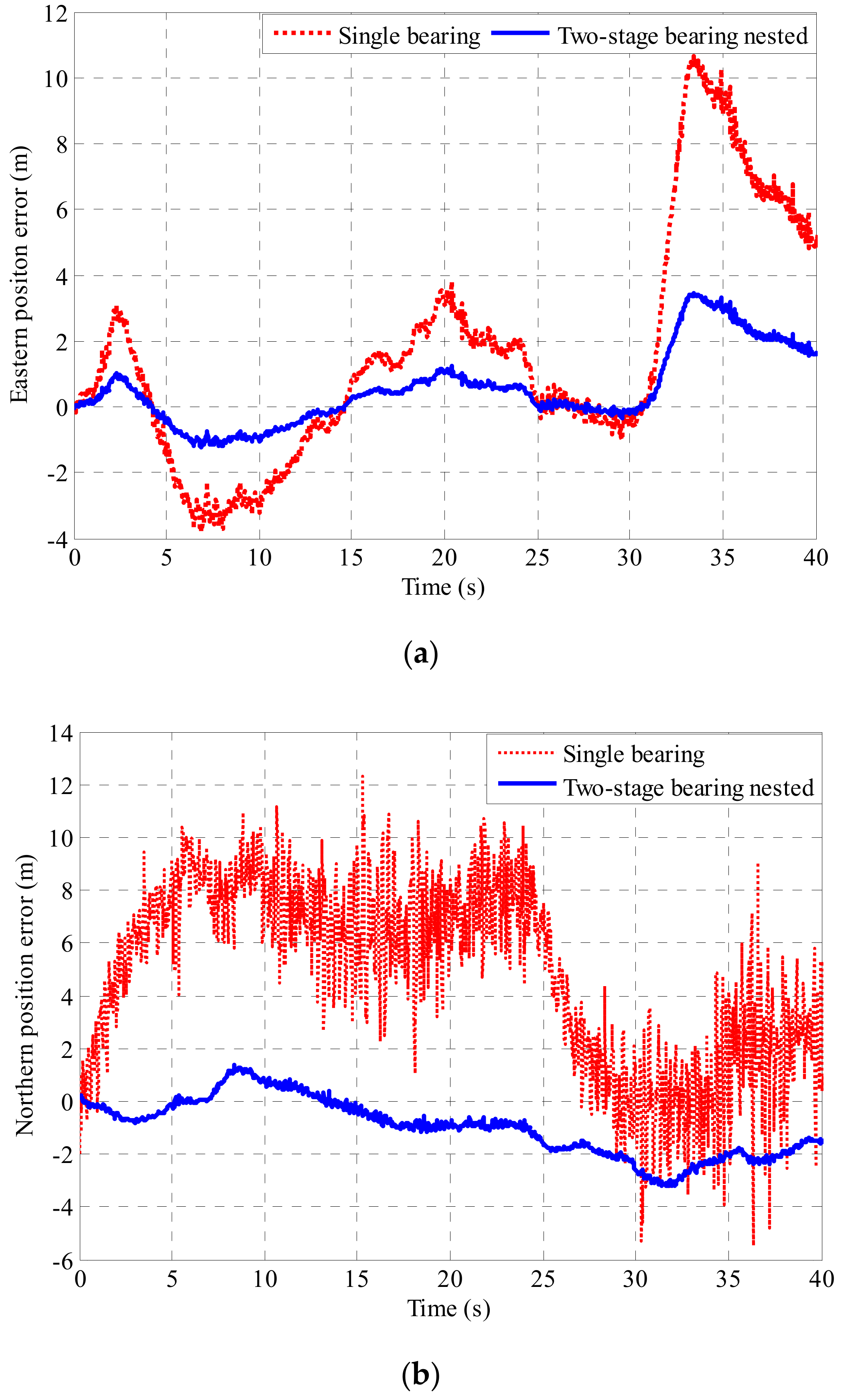
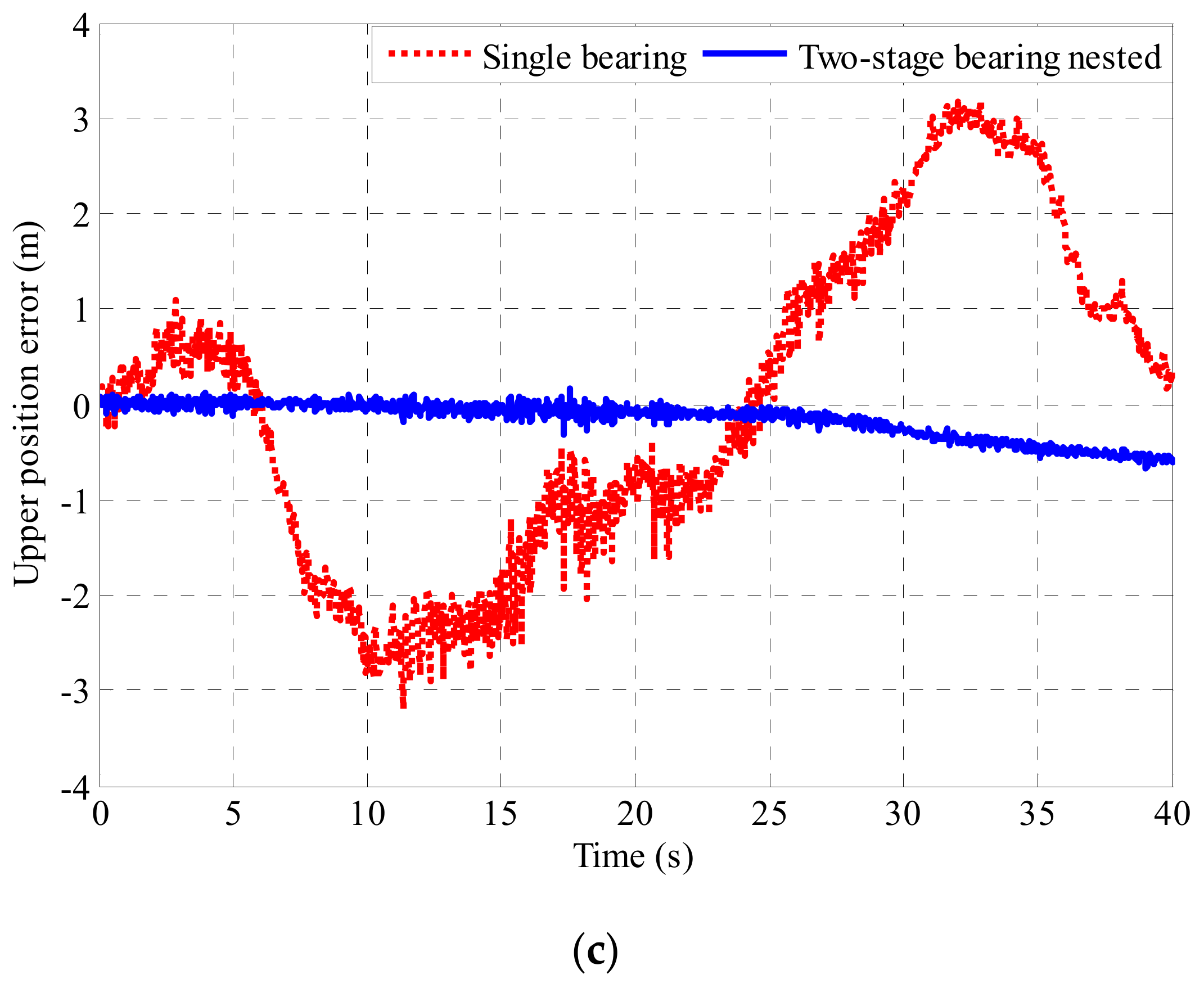
- The friction moment of the passive semi-strapdown roll stabilized platform is reduced effectively. The bearing nested structure effectively solves the problem of large friction of a single bearing in high speed and high overload environments by adopting the way of “multi-stage isolation and indirect drive”, and significantly reduces the swing angular rate of the platform inner cylinder, which is beneficial to realize the high-precision navigation solution of the platform.
- Improves the anti-overload capability and environmental adaptability of the platform. The bearing nested structure improves the axial overload resistance of the whole platform by means of multiple bearings bearing together.
Author Contributions
Funding
Conflicts of Interest
References
- Morrison, P.H.; Amberntson, D.S. Guidance and control of a cannon-launched guided projectile. J. Spacecr. Rocket. 2015, 4, 328–334. [Google Scholar] [CrossRef]
- Raul, C.; Luis, C. Hybridized attitude determination techniques to improve ballistic projectile navigation, guidance and control. Aerosp. Sci. Technol. 2018, 77, 138–148. [Google Scholar]
- Frank, F. Guidance and control of a projectile with reduced sensor and actuator requirements. J. Guid. Control Dyn. 2011, 34, 1757–1766. [Google Scholar]
- Du, J.; Guo, Y.; Lin, Y. A real-time temperature compensation algorithm for a force-rebalanced MEMS capacitive accelerometer based on resonant frequency. In Proceedings of the 2017 IEEE 12th International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Los Angeles, CA, USA, 9–12 April 2017. [Google Scholar]
- Wang, W.; He, S. Development of MEMS inertial instrument technology. Missiles Space Veh. 2009, 3, 23–28. [Google Scholar]
- Guo, D. Weapon-target assignment for multi-to-multi interception with grouping constraint. IEEE Access 2019, 7, 34838–34849. [Google Scholar] [CrossRef]
- Titterton, D.H.; Weston, J.L. Strapdown Inertial Navigation Technology; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2004. [Google Scholar]
- Xiong, H.L.; Mai, Z.Z.; Tang, J.; He, F. Robust GPS/INS/DVL navigation and positioning method using adaptive federated strong tracking filter based on weighted least square principle. IEEE Access 2019, 7, 26168–26178. [Google Scholar] [CrossRef]
- Frank, F.; James, D.; Ilmars, C. Flight performance of a small diameter munition with a rotating wing actuator. J. Spacecr. Rocket. 2015, 52, 305–319. [Google Scholar]
- Yang, B.; Wang, Y.; Xue, L.; Shan, B.; Wang, B. Accurate integrated position and orientation method for vehicles based on strapdown inertial navigation system/Doppler radar. Meas. Control 2018, 51, 431–442. [Google Scholar]
- Fu, Q.; Liu, Y.; Liu, Z.; Li, S.; Guan, B. Autonomous in-motion alignment for land vehicle strapdown inertial navigation system without the aid of external sensors. J. Navig. 2018, 71, 1312–1328. [Google Scholar] [CrossRef]
- Feng, W.U.; Qin, Y.Y.; Cheng, Y. Transfer alignment for missile-borne SINS using airborne GPS on moving base. J. Chin. Inert. Technol. 2013, 21, 56–60. [Google Scholar]
- Luisa, F.D.; Frank, E. Position estimation for projectiles using low-cost sensors and flight ynamics. J. Aerosp. Eng. 2016, 27, 611–620. [Google Scholar]
- Qian, Z.; Lei, W.; Zengjun, L.; Peide, F. An accurate calibration method based on velocity in a rotational inertial navigation system. Sensors 2015, 15, 18443–18458. [Google Scholar]
- Zhang, Q.; Wang, L.; Liu, Z.; Zhang, Y. Innovative self-calibration method for accelerometer scale factor of the missile-borne rins with fiber optic gyro. Opt. Express 2016, 24, 21228–21243. [Google Scholar] [CrossRef] [PubMed]
- Boronakhin, A.M.; Podgornaya, L.N.; Bokhman, E.D.; Filipenya, N.S.; Filatov, Y.V.; Shalymov, R.B.; Larionov, D.Y. Mems-based inertial system for railway track diagnostics. Gyroscopy Navig. 2011, 2, 261–268. [Google Scholar] [CrossRef]
- Li, S.T.; Gao, Y.B.; Liu, M. Multistage attitude determination alignment for velocity-aided in-motion strapdown inertial navigation system with different velocity models. Sensors 2019, 19, 665. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.F.; Sun, F.C. Central difference particle filter applied to transfer alignment for SINS on missiles. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 375–387. [Google Scholar] [CrossRef]
- Xu, M.M.; Bu, X.Z.; Yu, J.; He, Z.L. Spinning projectile’s attitude measurement with LW infrared radiation under sea-sky background. Infrared Phys. Technol. 2018, 90, 214–220. [Google Scholar] [CrossRef]
- Zhao, H.; Su, Z.; Liu, F.C.; Li, C. Magnetometer-based phase shifting ratio method for high spinning projectile’s attitude measurement. IEEE Access 2019, 7, 22509–22522. [Google Scholar] [CrossRef]
- Long, D.F.; Zhang, X.M.; Wei, X.H.; Luo, Z.L.; Cao, J.Z. A fast calibration and compensation method for magnetometers in strap-down spinning projectiles. Sensors 2018, 18, 4157. [Google Scholar] [CrossRef]
- Duan, X.M.; Liu, J.; Li, J.; Yang, W. Design and test of platform with partial strapdown inertial navigation system for guided projectile. Missiles Space Veh. 2014, 13, 20–24. [Google Scholar]
- Duan, X.M.; Liu, J.; Li, J. IInfluence of air lift on the stability of passive partial strapdown platform. Acta Armamentarii 2014, 35, 1813–1819. [Google Scholar]
- Duan, X.M.; Li, J.; Liu, J. Research on the dynamic model of a partial strapdown platform and the impact analysis of pitching angle and the stability of platform. Acta Armamentarii 2014, 33, 1436–1442. [Google Scholar]
- Florian, S.; Theodoulis, S.; Wernert, P.; Zasadzinski, M.; Boutayeb, M. Flight dynamics modeling of dual-spin guided projectiles. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1625–1641. [Google Scholar]
- Yang, H.S.; Deng, S.E.; Xia, X.T.; Zheng, X.P.; Liang, B. Development of simulation technology of rolling bearing in SKF. Bearing 2005, 31, 43–46. [Google Scholar]
- Das, K.; Batra, R.C. Symmetry breaking, snap-through and pull-in instabilities under dynamic loading of microelectromechanical shallow arches. Smart Mater. Struct. 2009, 18, 115008–115015. [Google Scholar] [CrossRef]
- Firouzian-Neja, A.C.; Bowen, S. Bi-stable hybrid composite laminates containing metallic strips: An experimental and numerical investigation. Smart Mater. Struct. 2019, 28, 55030–55048. [Google Scholar] [CrossRef]
- Kanatsu, M.; Ohta, H. Running torque of ball bearings with polymer lubricant (running torque formulas of deep groove ball bearings under axial loads). J. Tribol. 2008, 30, 41–50. [Google Scholar] [CrossRef]
- Cheng, F.Z.; Qu, L.Y.; Qiao, W.; Hao, W. Enhanced particle filtering for bearing remaining useful life prediction of wind turbine drivetrain gearboxes. IEEE Trans. Ind. Electron. 2019, 66, 4738–4748. [Google Scholar] [CrossRef]
- Wonil, K.; Lee, J.; Lee, Y.B. Theoretical and experimental approach to ball bearing frictional characteristics compared with cryogenic friction model and dry friction model. Mech. Syst. Signal Process. 2019, 124, 424–438. [Google Scholar]
- Florian, S.; Florian, G.; Martin, O.; Stuart, T. Challenges of friction reduction of engine plain bearings—Tackling the problem with novel bearingmaterials. Tribol. Int. 2019, 131, 238–250. [Google Scholar]
- Harris, T.A. Rolling Bearing Analysis; John Wiley and Sons: New York, NY, USA, 1984; pp. 11–73. [Google Scholar]
- Qin, W.Y.; Qin, H.; Zheng, H.B.; Zhang, Z.Y. The coupled effect of bearing misalignment and friction on vibration characteristics of a propulsion shafting system. Proc. Inst. Mech. Eng. Part M 2019, 233, 150–163. [Google Scholar] [CrossRef]
- Qu, J.; Wang, W.; Han, H.T.; Liu, X.W. Study on contact analysis of high angular contact ball bearings based on ANSYS. Mach. Des. Manuf. 2016, 8, 61–64. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing Type | Rolling Friction Variable | Sliding Friction Variable |
|---|---|---|
| Deep groove ball bearing | ||
| Angular contact ball bearing |
| Parameter | Deep Groove Ball Bearing SKF6200 | Angular Contact Ball Bearing SKF7008AC |
|---|---|---|
| Outer diameter D (mm) | 30 | 68 |
| Inner diameter d (mm) | 10 | 40 |
| Limit speed (r·min−1) | 34,000 | 26,000 |
| Rated static load C0 (kN) | 2.36 | 5.3 |
| Friction coefficient μ | 0.0015 | 0.0020 |
| R1 | 3.9 × 10−7 | 5.03 × 10−7 |
| R2 | 1.7 | 1.97 |
| R3 | / | 1.90 × 10−12 |
| S1 | 3.23 × 10−3 | 1.30 × 10−2 |
| S2 | 36.5 | 0.68 |
| S3 | / | 1.91 × 10−12 |
| Material | Elastic Modulus/GPa | Density/(kg·m−3) | Poisson’s Ratio | Yield Strength/MPa |
|---|---|---|---|---|
| GCr15 bearing steel | 210 | 7810 | 0.29 | 1458 |
| Parameter | Numerical Value |
|---|---|
| m/kg | 1 |
| /(kg·mm2) | 5860 |
| L/mm | 14 |
| g/(m/s2) | 9.8 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, X.; Li, J.; Zhang, D.; Feng, K.; Zhang, J.; Li, J.; Lu, Z. Optimization of a New High Rotary Missile-Borne Stabilization Platform. Sensors 2019, 19, 4143. https://doi.org/10.3390/s19194143
Wei X, Li J, Zhang D, Feng K, Zhang J, Li J, Lu Z. Optimization of a New High Rotary Missile-Borne Stabilization Platform. Sensors. 2019; 19(19):4143. https://doi.org/10.3390/s19194143
Chicago/Turabian StyleWei, Xiaokai, Jie Li, Debiao Zhang, Kaiqiang Feng, Jiayu Zhang, Jinqiang Li, and Zhenglong Lu. 2019. "Optimization of a New High Rotary Missile-Borne Stabilization Platform" Sensors 19, no. 19: 4143. https://doi.org/10.3390/s19194143