
A 3D Approach Using a Control Algorithm to Minimize the Effects on the Healthy Tissue in the Hyperthermia for Cancer Treatment

Abstract
:1. Introduction
2. Material and Methods
2.1. Mathematical Model
- Equilibrium site: The heat transfer between blood and tissue occurs in capillaries;
- Blood perfusion: The blood flow in capillaries is considered isotropic;
- Vascular architecture: The local vascular geometry is not considered;
- Blood temperature: The body core temperature is the same as that reached by the capillaries.
2.2. Numerical Scheme
2.3. Differential Evolution
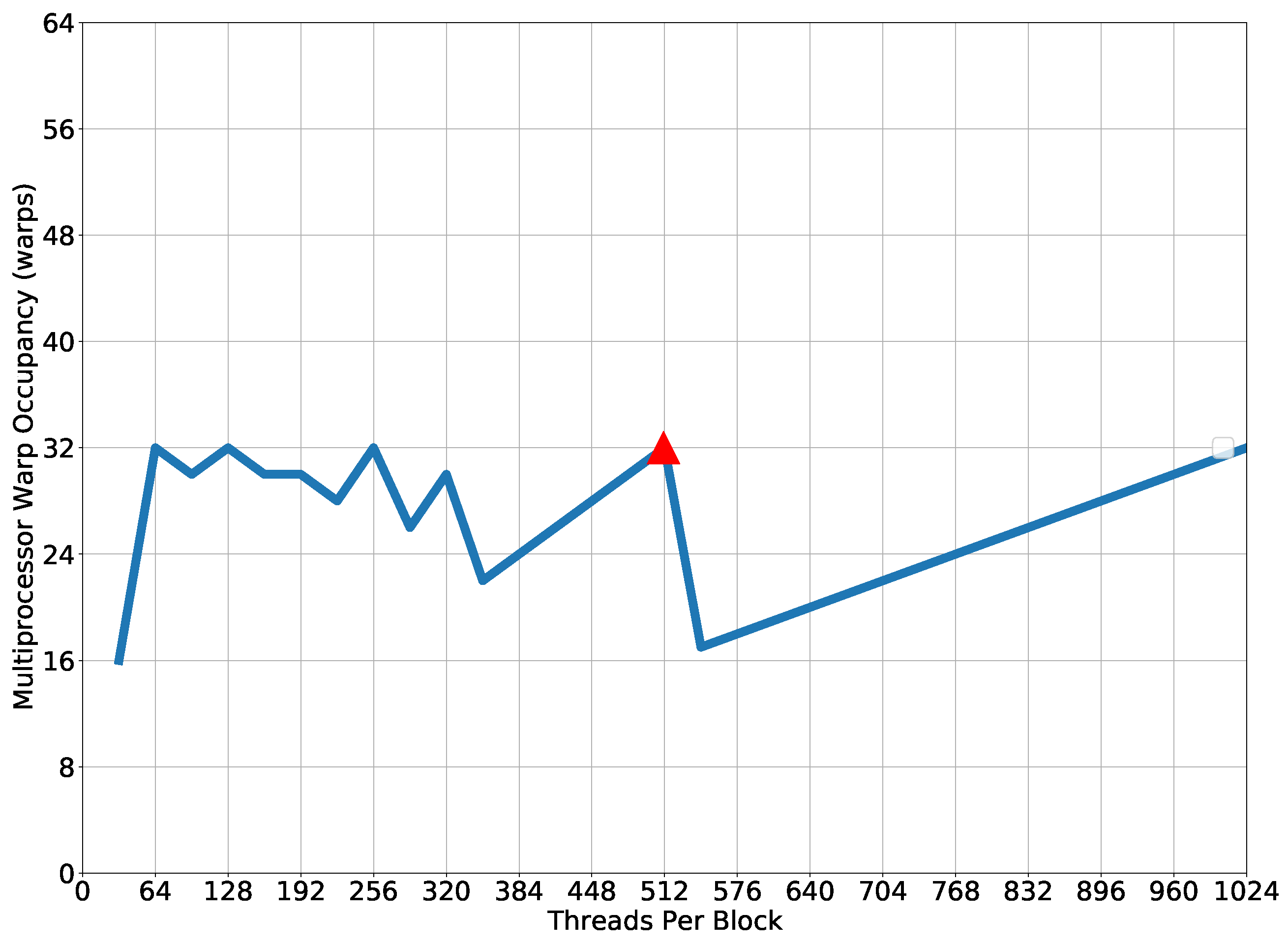
2.4. CUDA Parallel Programming
3. Numerical Results
3.1. Computational Environment
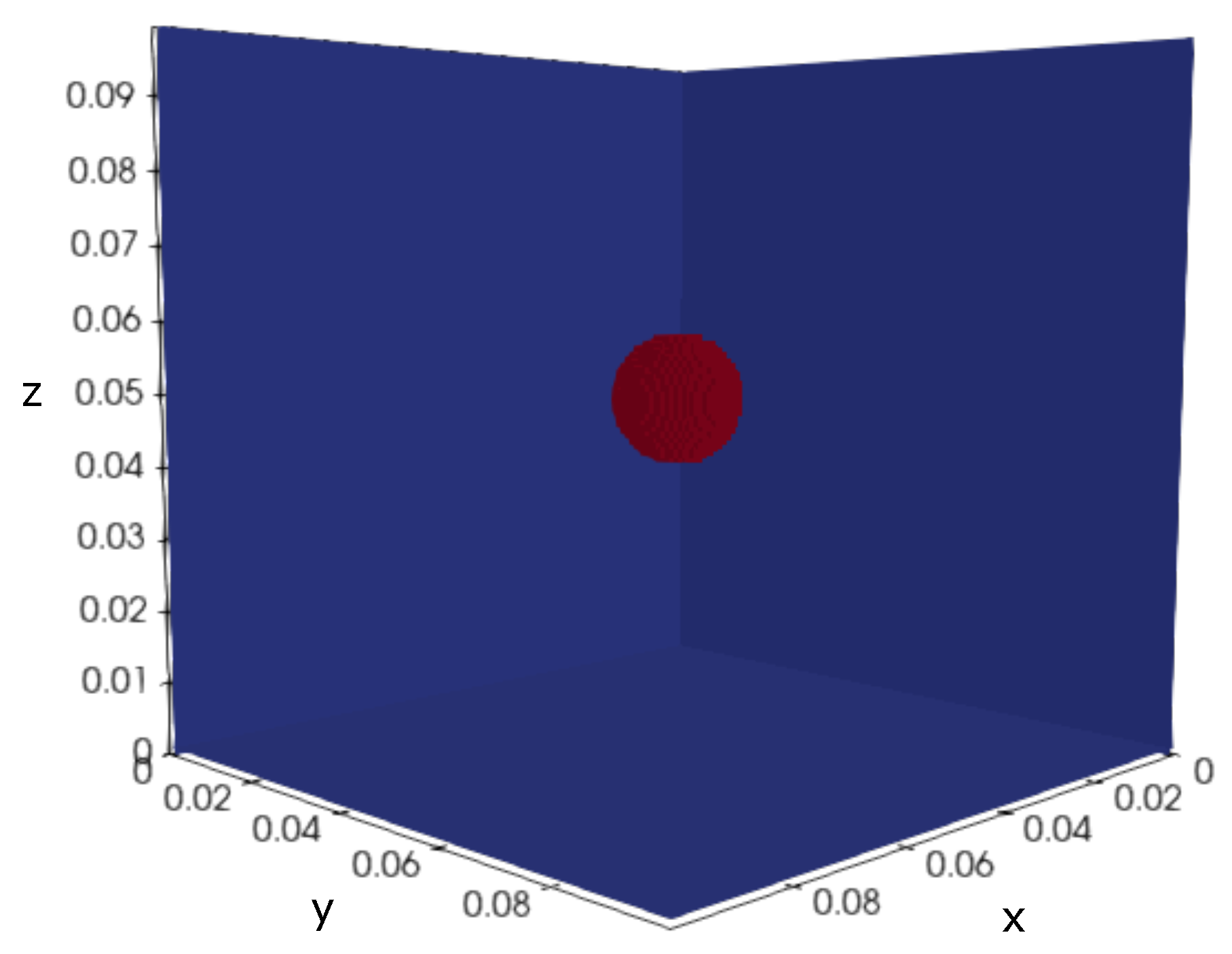
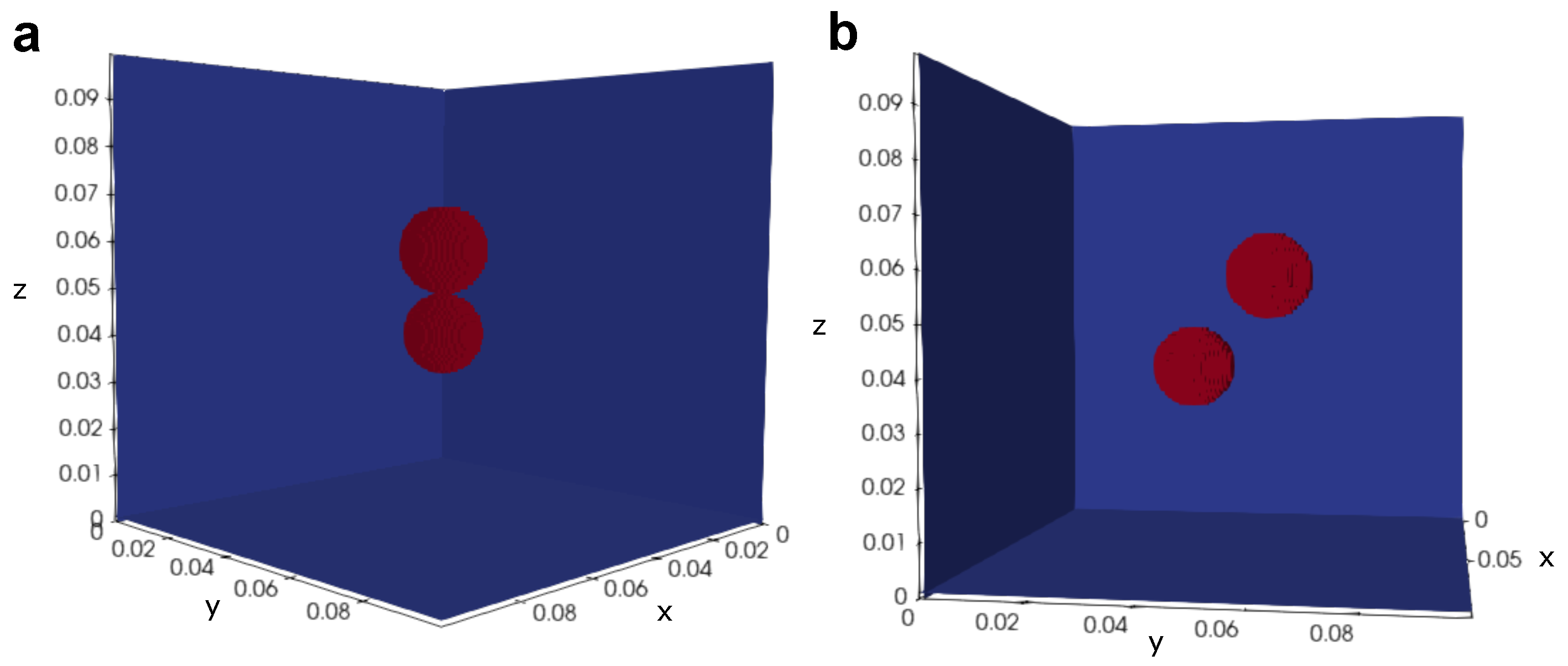
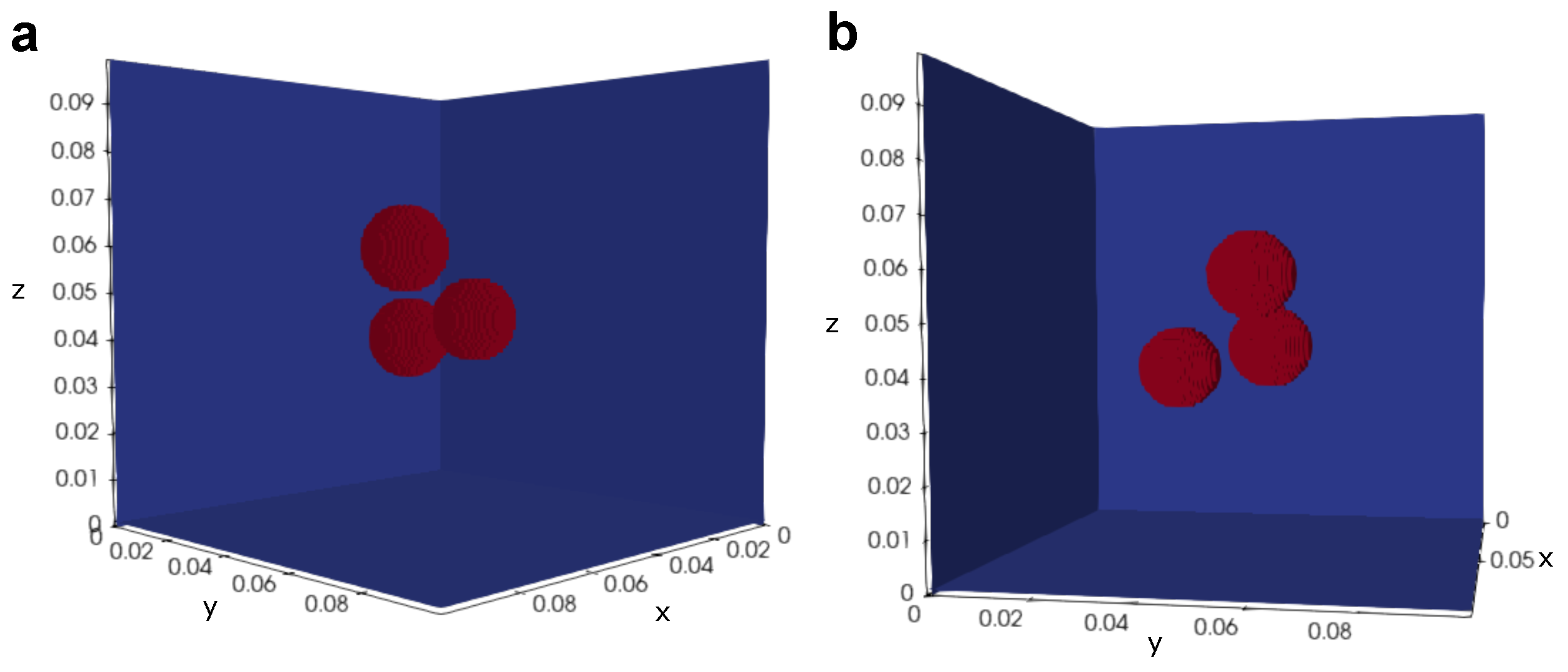
3.2. Simulation Scenarios
3.3. Grid Independence Study
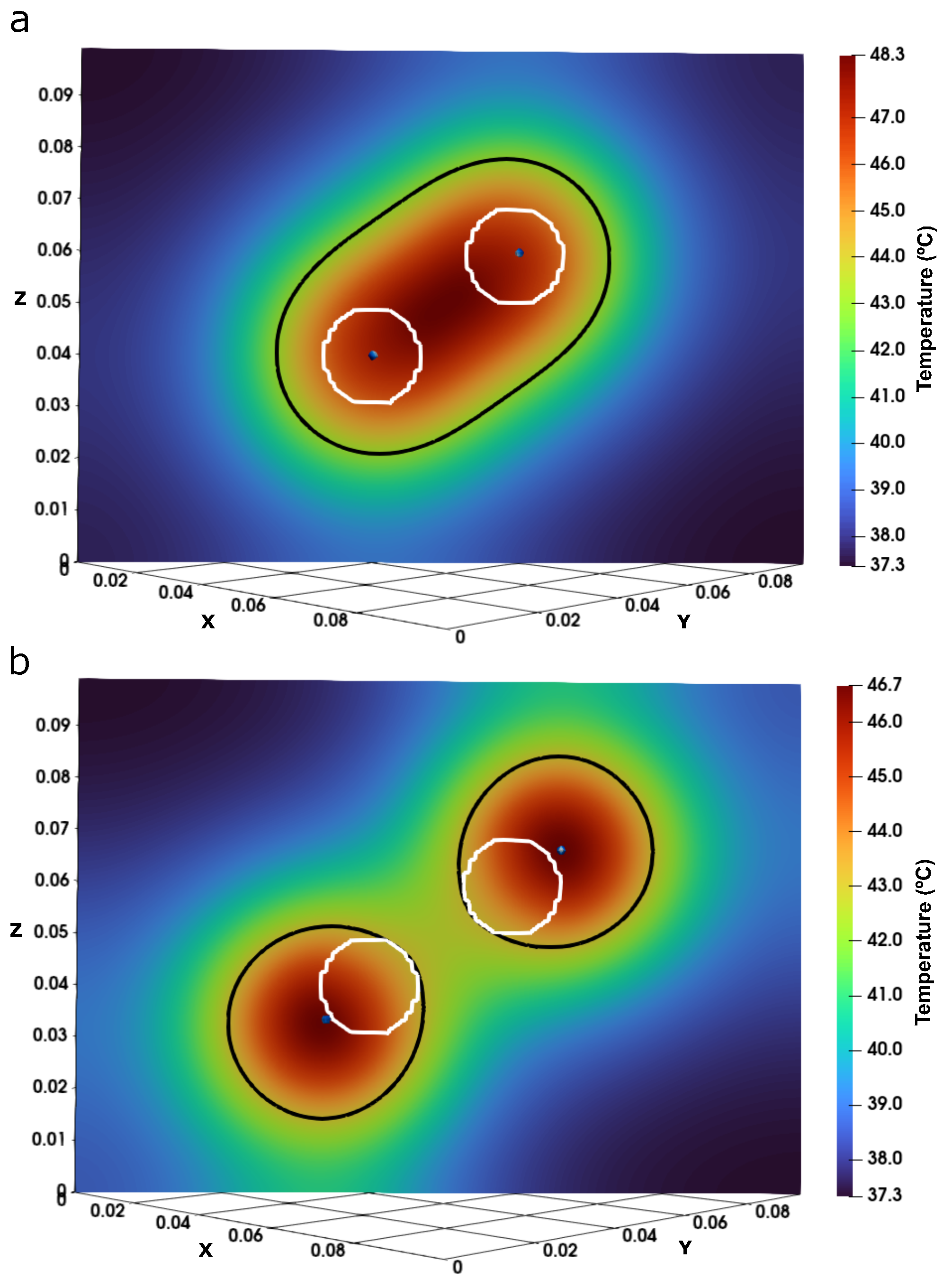
3.4. Results of the Optimization Method
3.4.1. First Scenario
3.4.2. Second Scenario
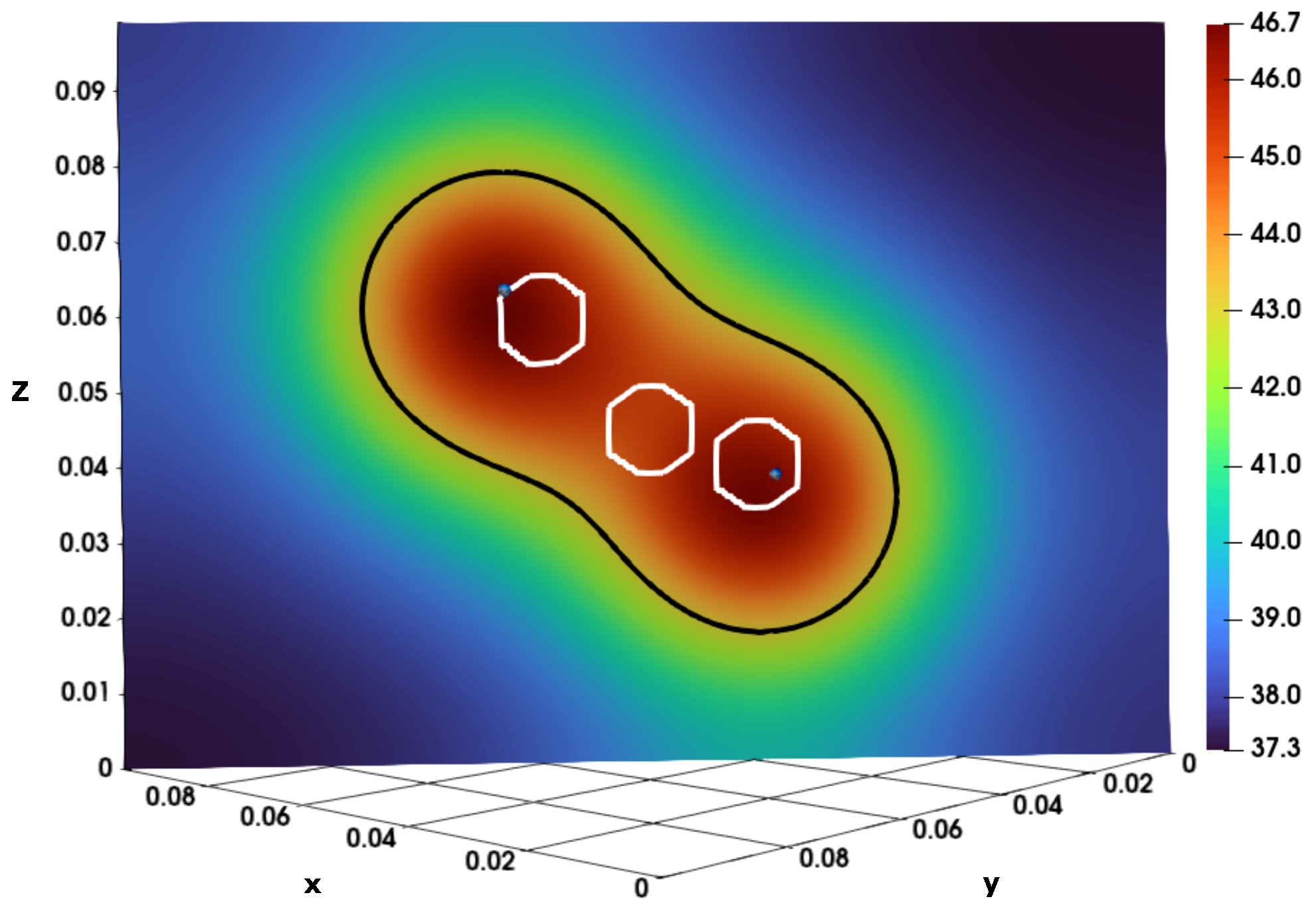
3.4.3. Third Scenario
3.5. Performance Evaluation
4. Discussion
5. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
References
- WHO. World Health Organization. Available online: https://www.who.int/news-room/fact-sheets/detail/cancer (accessed on 4 October 2022).
- OPAS. Organização Pan-Americana da Saúde. Available online: https://www.paho.org/pt/topicos/cancer (accessed on 4 October 2022).
- Giustini, A.J.; Petryk, A.A.; Cassim, S.M.; Tate, J.A.; Baker, I.; Hoopes, P.J. Magnetic nanoparticle hyperthermia in cancer treatment. Nano Life 2010, 1, 17–32. [Google Scholar] [CrossRef] [PubMed]
- Moros, E. Physics of Thermal Therapy: Fundamentals and Clinical Applications; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Salloum, M.; Ma, R.; Zhu, L. Enhancement in treatment planning for magnetic nanoparticle hyperthermia: Optimization of the heat absorption pattern. Int. J. Hyperth. 2009, 25, 309–321. [Google Scholar] [CrossRef]
- Engin, K. Biological rationale for hyperthermia in cancer treatment (II). Neoplasma 1994, 41, 277–283. [Google Scholar] [PubMed]
- Attaluri, A.; Ma, R.; Qiu, Y.; Li, W.; Zhu, L. Nanoparticle distribution and temperature elevations in prostatic tumours in mice during magnetic nanoparticle hyperthermia. Int. J. Hyperth. 2011, 27, 491–502. [Google Scholar] [CrossRef]
- Khaled, A.R.; Vafai, K. The role of porous media in modeling flow and heat transfer in biological tissues. Int. J. Heat Mass Transf. 2003, 46, 4989–5003. [Google Scholar] [CrossRef]
- Jiji, L.M. Heat Conduction; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Pennes, H.H. Analysis of tissue and arterial blood temperature in the restind human forearm. J. Appl. Phisiol. 1948, 1, 93–122. [Google Scholar] [CrossRef]
- Reis, R.F.; dos Santos Loureiro, F.; Lobosco, M. 3D numerical simulations on GPUs of hyperthermia with nanoparticles by a nonlinear bioheat model. J. Comput. Appl. Math. 2016, 295, 35–47. [Google Scholar] [CrossRef]
- Reis, R.F.; dos Santos Loureiro, F.; Lobosco, M. Parameters analysis of a porous medium model for treatment with hyperthermia using OpenMP. J. Phys. Conf. Ser. 2015, 633, 012087. [Google Scholar] [CrossRef]
- Suriyanto; Ng, E.Y.K.; Kumar, S.D. Physical mechanism and modeling of heat generation and transfer in magnetic fluid hyperthermia through Néelian and Brownian relaxation: A review. Biomed. Eng. Online 2017, 16, 1–22. [Google Scholar] [CrossRef] [PubMed]
- Shih, T.C.; Yuan, P.; Lin, W.L.; Kou, H.S. Analytical analysis of the Pennes bioheat transfer equation with sinusoidal heat flux condition on skin surface. Med. Eng. Phys. 2007, 29, 946–953. [Google Scholar] [CrossRef]
- Valente, A.; Peters, F.C.; de Souza, R.V.M.; Mansur, W.J. 3D numerical simulation of real-time temperature field in a hyperthermia cancer treatment using OcTree meshes. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 1–11. [Google Scholar] [CrossRef]
- Charny, C.K. Mathematical Models of Bioheat Transfer. In Advances in heat transfer; Elsevier: Amsterdam, The Netherlands, 1992; Volume 22, pp. 19–155. [Google Scholar] [CrossRef]
- Ezzat, M.A.; AlSowayan, N.S.; Al-Muhiameed, Z.I.; Ezzat, S.M. Fractional modelling of Pennes’ bioheat transfer equation. Heat Mass Transf. 2014, 50, 907–914. [Google Scholar] [CrossRef]
- Ferrás, L.L.; Ford, N.J.; Morgado, M.L.; Nóbrega, J.M.; Rebelo, M.S. Fractional Pennes’ bioheat equation: Theoretical and numerical studies. Fract. Calc. Appl. Anal. 2015, 18, 1080–1106. [Google Scholar] [CrossRef]
- Attar, M.M.; Haghpanahi, M.; Amanpour, S.; Mohaqeq, M. Analysis of bioheat transfer equation for hyperthermia cancer treatment. J. Mech. Sci. Technol. 2014, 28, 763–771. [Google Scholar] [CrossRef]
- Miaskowski, A.; Sawicki, B. Magnetic fluid hyperthermia modeling based on phantom measurements and realistic breast model. IEEE Trans. Biomed. Eng. 2013, 60, 1806–1813. [Google Scholar] [CrossRef] [PubMed]
- Reis, R.F.; dos Santos Loureiro, F.; Lobosco, M. A Parallel 2D Numerical Simulation of Tumor Cells Necrosis by Local Hyperthermia. J. Phys. Conf. Ser. 2014, 490, 012138. [Google Scholar] [CrossRef]
- Suleman, M.; Riaz, S. 3D in silico study of magnetic fluid hyperthermia of breast tumor using Fe3O4 magnetic nanoparticles. J. Therm. Biol. 2020, 91, 102635. [Google Scholar] [CrossRef] [PubMed]
- Tucci, C.; Trujillo, M.; Berjano, E.; Iasiello, M.; Andreozzi, A.; Vanoli, G.P. Pennes’ bioheat equation vs. porous media approach in computer modeling of radiofrequency tumor ablation. Sci. Rep. 2021, 11, 5272. [Google Scholar] [CrossRef]
- Babu, B.; Jehan, M.M.L. Differential evolution for multi-objective optimization. In Proceedings of the 2003 Congress on Evolutionary Computation (CEC’03), Canberra, ACT, Australia, 8–12 December 2003; IEEE: Piscataway, NJ, USA, 2003; Volume 4, pp. 2696–2703. [Google Scholar] [CrossRef]
- Liu, R.; Fan, J.; Jiao, L. Integration of improved predictive model and adaptive differential evolution based dynamic multi-objective evolutionary optimization algorithm. Appl. Intell. 2015, 43, 192–207. [Google Scholar] [CrossRef]
- Rogalsky, T.; Kocabiyik, S.; Derksen, R. Differential evolution in aerodynamic optimization. Can. Aeronaut. Space J. 2000, 46, 183–190. [Google Scholar]
- Ronkkonen, J.; Kukkonen, S.; Price, K.V. Real-parameter optimization with differential evolution. In Proceedings of the 2005 IEEE Congress on Evolutionary Computation, Edinburgh, UK, 2–5 September 2005; IEEE: Piscataway, NJ, USA, 2005; Volume 1, pp. 506–513. [Google Scholar] [CrossRef]
- Chou, C.Y.; Chen, K.T. Performance Evaluations of Different Parallel Programming Paradigms for Pennes Bioheat Equations and Navier-Stokes Equations. In Proceedings of the 2016 International Computer Symposium (ICS), Chiayi, Taiwan, 15–17 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 503–508. [Google Scholar] [CrossRef]
- Bousselham, A.; Bouattane, O.; Youssfi, M.; Raihani, A. 3D brain tumor localization and parameter estimation using thermographic approach on GPU. J. Therm. Biol. 2018, 71, 52–61. [Google Scholar] [CrossRef] [PubMed]
- Kalantzis, G.; Miller, W.; Tichy, W.; LeBlang, S. A GPU accelerated finite differences method of the bioheat transfer equation for ultrasound thermal ablation. In Software Engineering, Artificial Intelligence, Networking and Parallel/Distributed Computing; Springer: Berlin/Heidelberg, Germany, 2016; pp. 45–55. [Google Scholar] [CrossRef]
- Salloum, M.; Ma, R.; Zhu, L. An in-vivo experimental study of temperature elevations in animal tissue during magnetic nanoparticle hyperthermia. Int. J. Hyperth. 2008, 24, 589–601. [Google Scholar] [CrossRef] [PubMed]
- LeVeque, R.J. Finite Difference Methods For Ordinary And Partial Differential Equations: Steady-State And Time-Dependent Problems; SIAM: Philadelphia, PA, USA, 2007. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Xu, F.; Lu, T.; Seffen, K.; Ng, E. Mathematical modeling of skin bioheat transfer. Appl. Mech. Rev. 2009, 62, 050801. [Google Scholar] [CrossRef]
- Cao, L.; Qin, Q.H.; Zhao, N. An RBF-MFS model for analysing thermal behavior of skin tissues. Int. J. Heat Mass Transf. 2010, 53, 2827–2839. [Google Scholar] [CrossRef]
- Singh, M.; Singh, T.; Soni, S. Pre-operative assessment of ablation margins for variable blood perfusion metrics in a magnetic resonance imaging based complex breast tumour anatomy: Simulation paradigms in thermal therapies. Comput. Methods Programs Biomed. 2021, 198, 105781. [Google Scholar] [CrossRef]
- Singh, M. Incorporating vascular-stasis based blood perfusion to evaluate the thermal signatures of cell-death using modified Arrhenius equation with regeneration of living tissues during nanoparticle-assisted thermal therapy. Int. Commun. Heat Mass Transf. 2022, 135, 106046. [Google Scholar] [CrossRef]
- Singh, M.; Gu, Q.; Ma, R.; Zhu, L. Heating protocol design affected by nanoparticle redistribution and thermal damage model in magnetic nanoparticle hyperthermia for cancer treatment. J. Heat Transf. 2020, 142, 072501. [Google Scholar] [CrossRef]
- Pearce, J.A. Improving accuracy in Arrhenius models of cell death: Adding a temperature-dependent time delay. J. Biomech. Eng. 2015, 137, 121006. [Google Scholar] [CrossRef] [PubMed]
- Singh, M.; Ma, R.; Zhu, L. Quantitative evaluation of effects of coupled temperature elevation, thermal damage, and enlarged porosity on nanoparticle migration in tumors during magnetic nanoparticle hyperthermia. Int. Commun. Heat Mass Transf. 2021, 126, 105393. [Google Scholar] [CrossRef]
- Singh, M. Biological heat and mass transport mechanisms behind nanoparticles migration revealed under microCT image guidance. Int. J. Therm. Sci. 2023, 184, 107996. [Google Scholar] [CrossRef]
- Golneshan, A.A.; Lahonian, M. Diffusion of magnetic nanoparticles in a multi-site injection process within a biological tissue during magnetic fluid hyperthermia using lattice Boltzmann method. Mech. Res. Commun. 2011, 38, 425–430. [Google Scholar] [CrossRef]
- Rahpeima, R.; Lin, C.A. Numerical study of magnetic hyperthermia ablation of breast tumor on an anatomically realistic breast phantom. PLoS ONE 2022, 17, e0274801. [Google Scholar] [CrossRef] [PubMed]
- Zastrow, E.; Hagness, S.C.; Van Veen, B.D. 3D computational study of non-invasive patient-specific microwave hyperthermia treatment of breast cancer. Phys. Med. Biol. 2010, 55, 3611. [Google Scholar] [CrossRef]
- Prasad, B.; Ha, Y.H.; Lee, S.K.; Kim, J.K. Patient-specific simulation for selective liver tumor treatment with noninvasive radiofrequency hyperthermia. J. Mech. Sci. Technol. 2016, 30, 5837–5845. [Google Scholar] [CrossRef]
- Gouvêa de Barros, B.; Sachetto Oliveira, R.; Meira, W.; Lobosco, M.; Weber dos Santos, R. Simulations of complex and microscopic models of cardiac electrophysiology powered by Multi-GPU platforms. Comput. Math. Methods Med. 2012, 2012, 824569. [Google Scholar] [CrossRef] [PubMed]
- Xavier, M.; Do Nascimento, T.; Dos Santos, R.; Lobosco, M. Use of multiple gpus to speedup the execution of a three-dimensional computational model of the innate immune system. J. Phys. Conf. Ser. 2014, 490, 012075. [Google Scholar] [CrossRef]
- Cordeiro, R.P.; Oliveira, R.S.; dos Santos, R.W.; Lobosco, M. Improving the Performance of Cardiac Simulations in a Multi-GPU Architecture Using a Coalesced Data and Kernel Scheme. In Proceedings of the Algorithms and Architectures for Parallel Processing: 16th International Conference, ICA3PP 2016, Granada, Spain, 14–16 December 2016; Proceedings 15. Springer: Cham, Switzerland, 2016; pp. 546–553. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Unit | Healthy Tissue | Tumor Tissue |
|---|---|---|---|
| k | W/m C | ||
| s | |||
| Kg/m | |||
| Kg/m | |||
| W/m | |||
| c | J/Kg C | ||
| J/Kg C | |||
| A | W/m | ||
| m |
| Optimization | O(p) | |||
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 | ||||
| 5 | ||||
| 6 | ||||
| 7 | ||||
| 8 | ||||
| 9 | ||||
| 10 | ||||
| Optimization | O(p) | ||||||
|---|---|---|---|---|---|---|---|
| 1 | |||||||
| 2 | |||||||
| 3 | |||||||
| 4 | |||||||
| 5 | |||||||
| 6 | |||||||
| 7 | |||||||
| 8 | |||||||
| 9 | |||||||
| 10 | |||||||
| Optimization | O(p) | ||||||
|---|---|---|---|---|---|---|---|
| 1 | |||||||
| 2 | |||||||
| 3 | |||||||
| 4 | |||||||
| 5 | |||||||
| 6 | |||||||
| 7 | |||||||
| 8 | |||||||
| 9 | |||||||
| 10 | |||||||
| Mesh () | CPU Time (s) | GPU Time (s) | Speedup |
|---|---|---|---|
| 90.7 ± 0.55 | 1.1 ± 0.002 | 82.5 | |
| 759.2 ± 2.38 | 9.0 ± 0.04 | 84.4 | |
| 5998.96 ± 22.60 | 72.1 ± 0.05 | 83.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fatigate, G.R.; Lobosco, M.; Reis, R.F. A 3D Approach Using a Control Algorithm to Minimize the Effects on the Healthy Tissue in the Hyperthermia for Cancer Treatment. Entropy 2023, 25, 684. https://doi.org/10.3390/e25040684
Fatigate GR, Lobosco M, Reis RF. A 3D Approach Using a Control Algorithm to Minimize the Effects on the Healthy Tissue in the Hyperthermia for Cancer Treatment. Entropy. 2023; 25(4):684. https://doi.org/10.3390/e25040684
Chicago/Turabian StyleFatigate, Gustavo Resende, Marcelo Lobosco, and Ruy Freitas Reis. 2023. "A 3D Approach Using a Control Algorithm to Minimize the Effects on the Healthy Tissue in the Hyperthermia for Cancer Treatment" Entropy 25, no. 4: 684. https://doi.org/10.3390/e25040684