
Multi-Fractal Weibull Adaptive Model for the Remaining Useful Life Prediction of Electric Vehicle Lithium Batteries
 , , ,
, , ,
Abstract
:1. Introduction
1.1. Research Background
1.2. Significance of the Research
1.3. Literature Review
1.4. Recent Progress about the RUL Prediction Based on Random Process
1.5. Contributions and Structure of the Article
2. Long Range Dependence and 1/f Characteristics of the mfWm
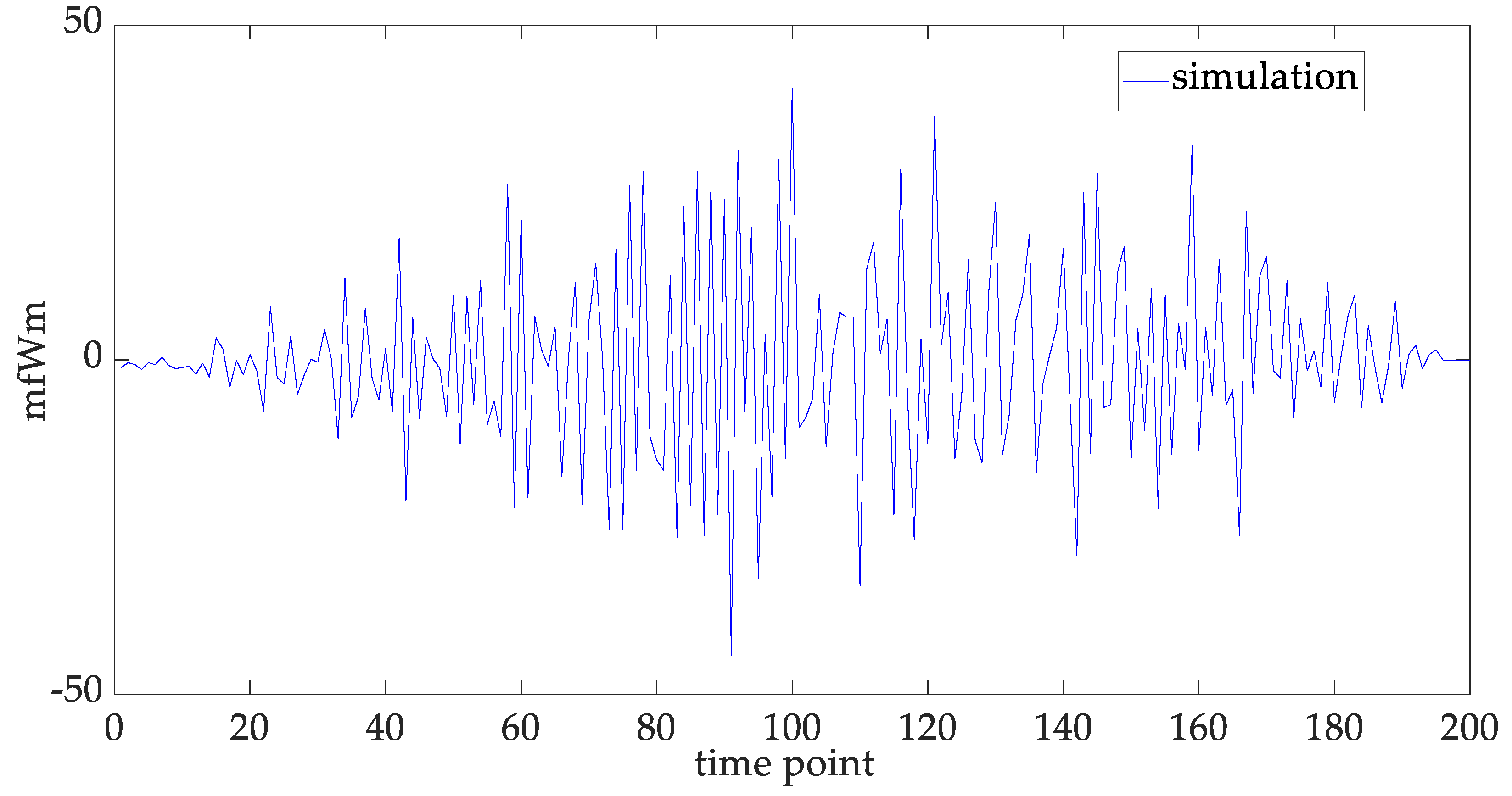
2.1. Definition of the mfWm
2.2. The mfWm Is a Long Range Dependent 1/f Noise
3. Age and State-Dependent Degradation Model with Adaptive Mechanism
3.1. Age and State-Dependent Drift Function
3.2. Adaptive Updates of the Degradation Model
3.3. Analysis of the Degradation Model for Lithium Batteries Powering the Electric Motor
3.4. Parameter Estimation
4. Adaptive RUL Prediction Model on the Basis of the Degradation Model
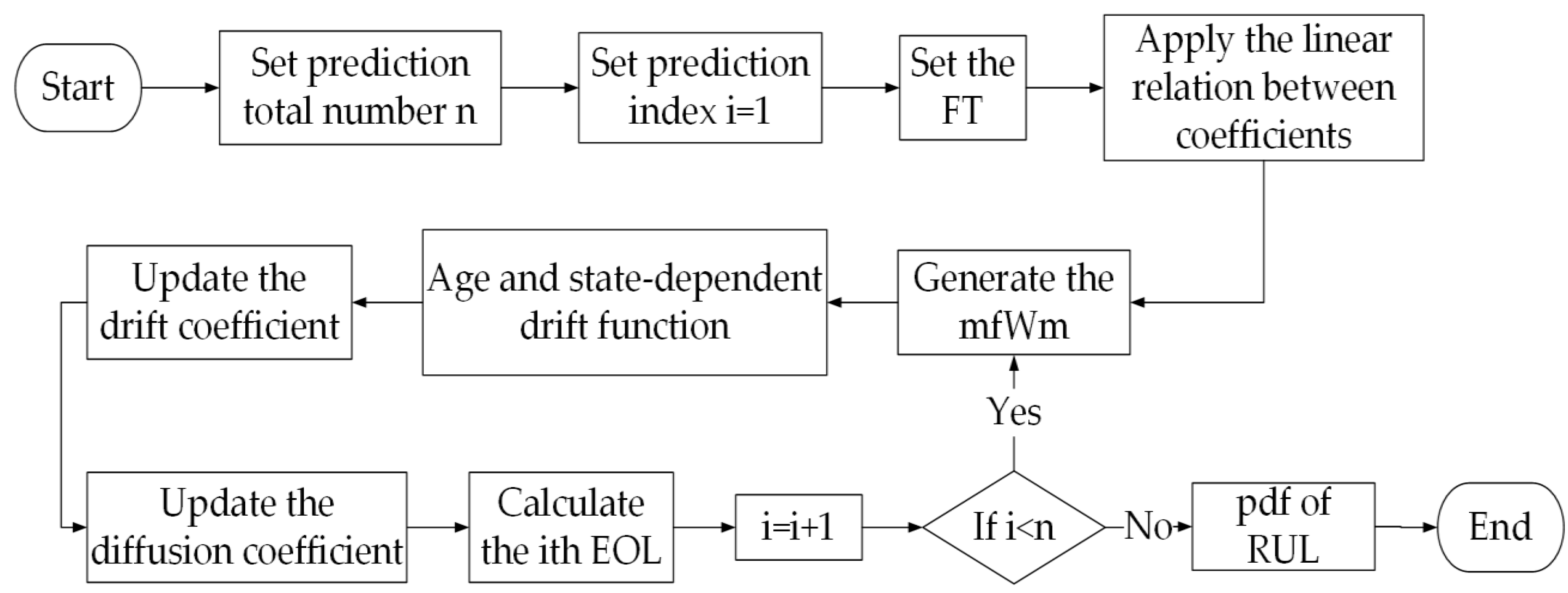
4.1. Adaptive RUL Prediction Algorithm Based on the mfWm
4.2. Convergence of the RUL Prediction Model
5. Case Study
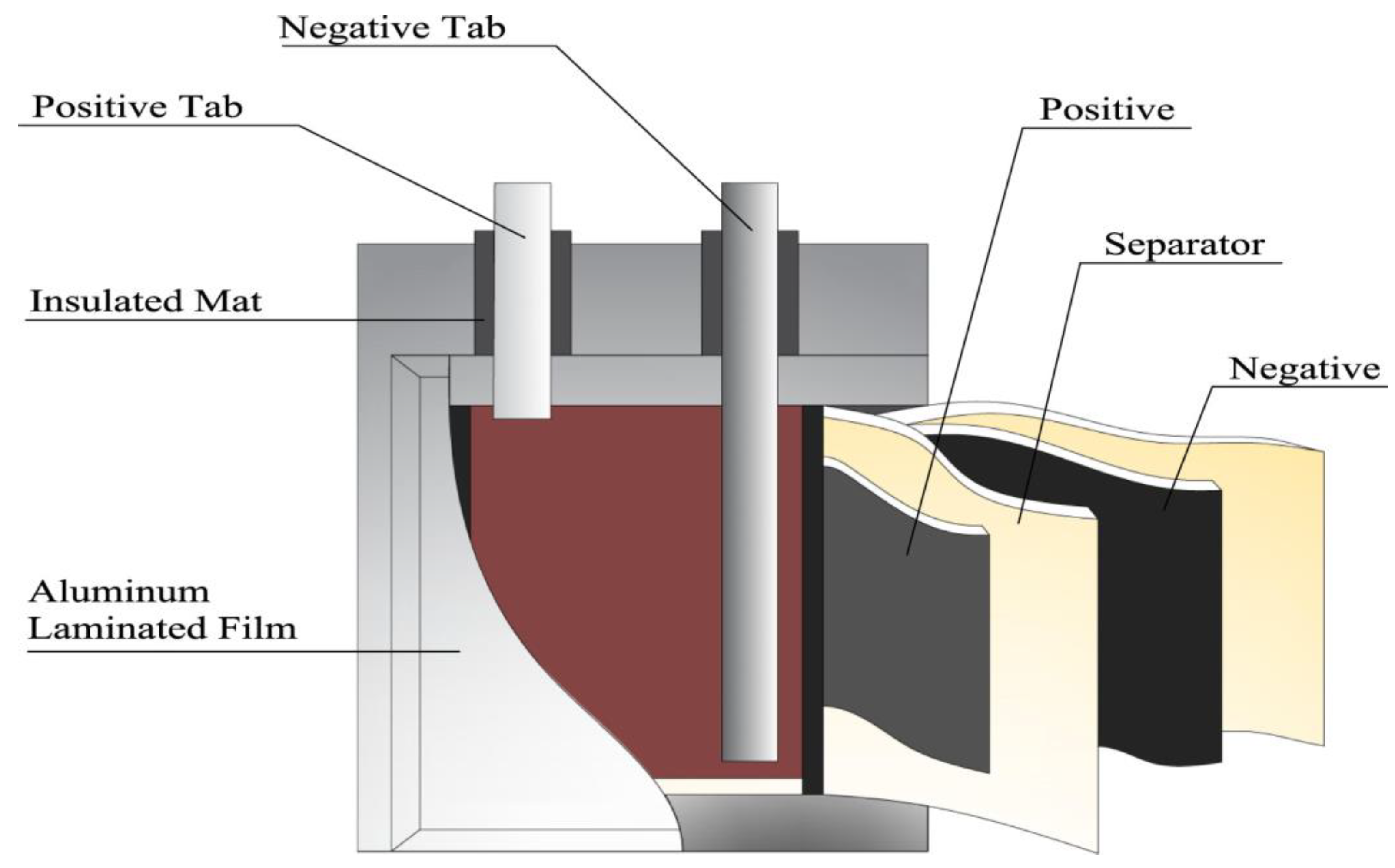
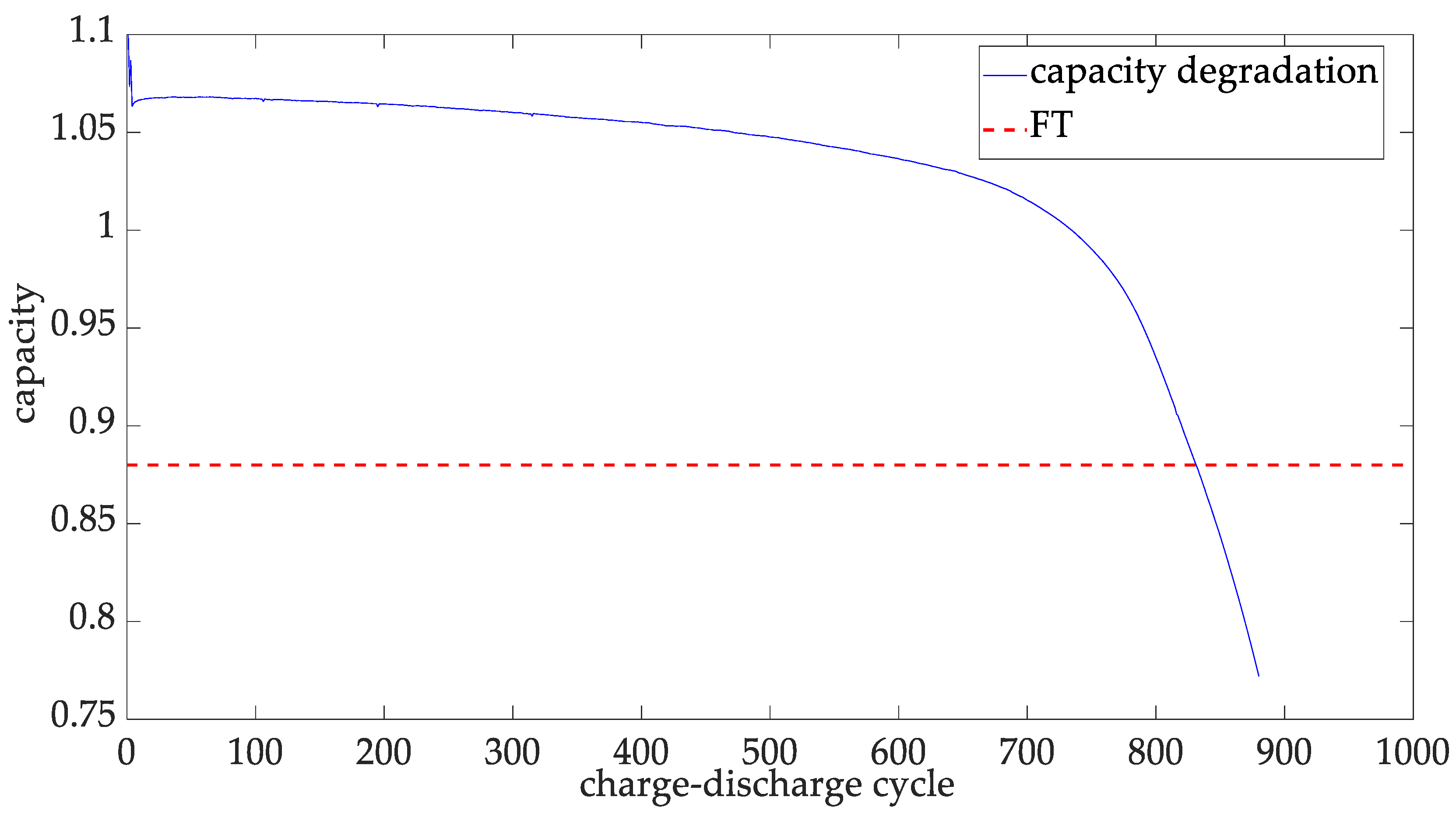
5.1. Lifetime Characteristics of the Lithium Battery in an Electric Vehicle
5.2. Lithium Battery Capacity Dataset for the Validation
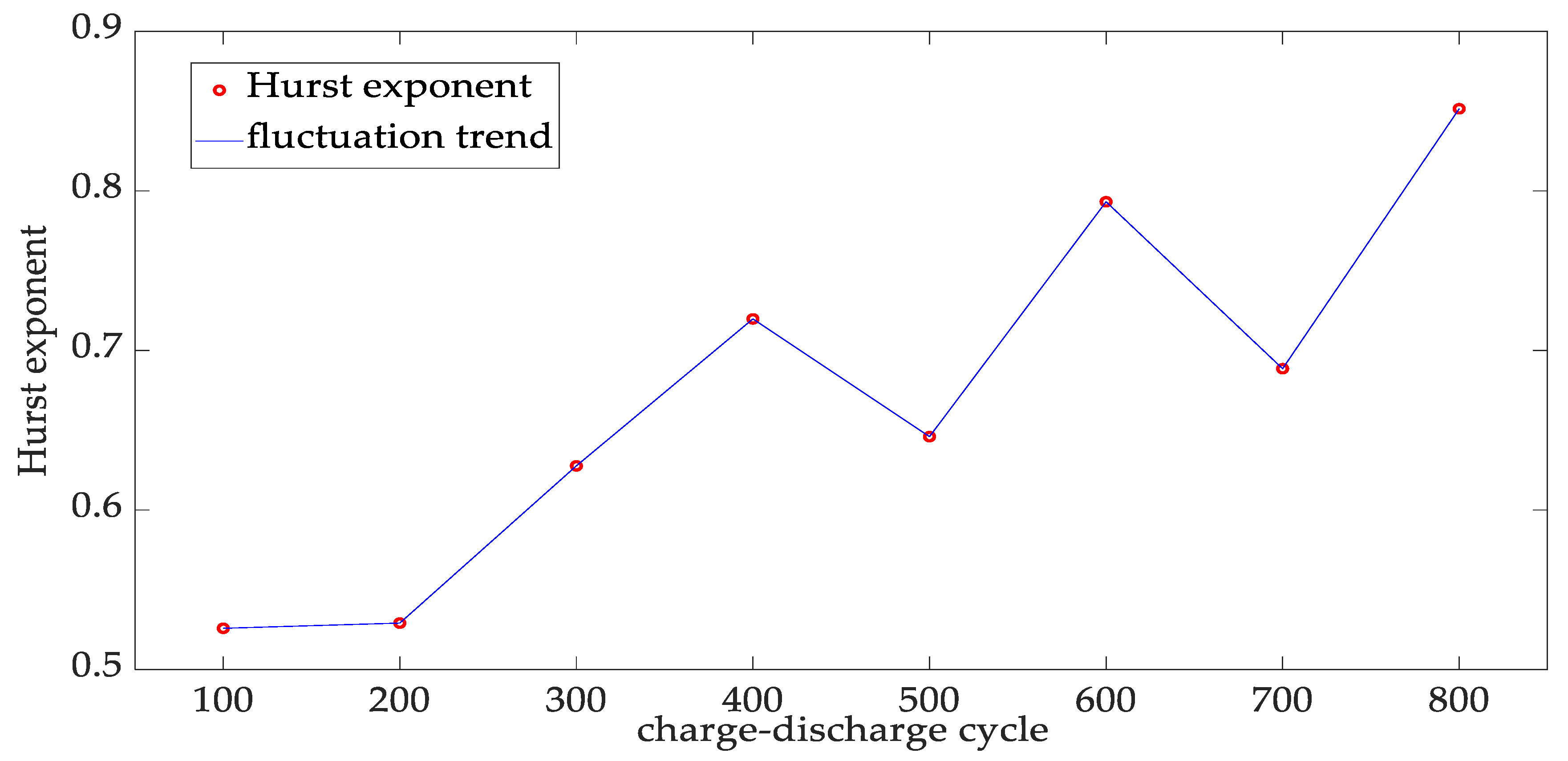
5.3. Fluctuation of the Hurst Exponent in the Capacity Degradation Data
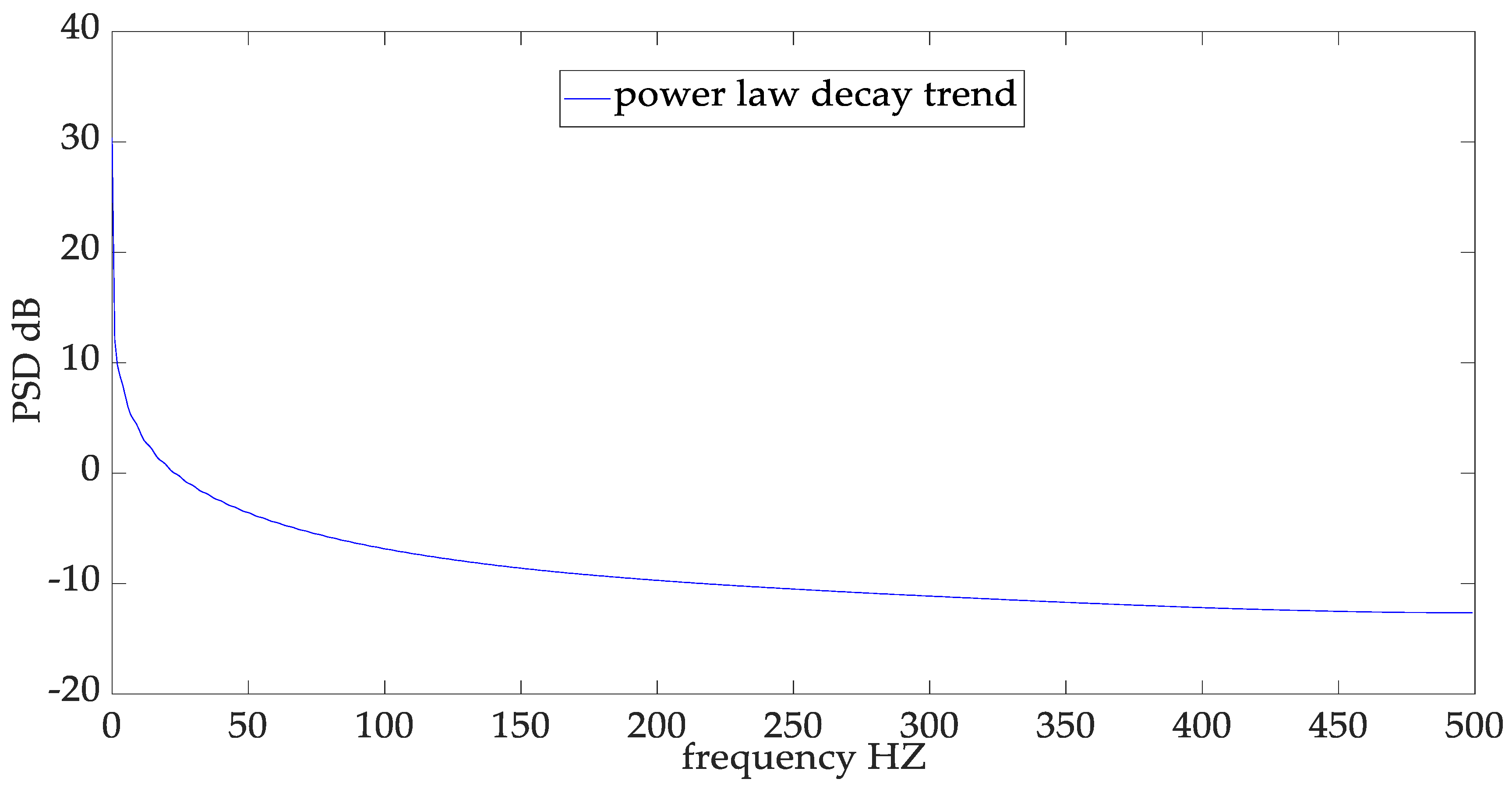
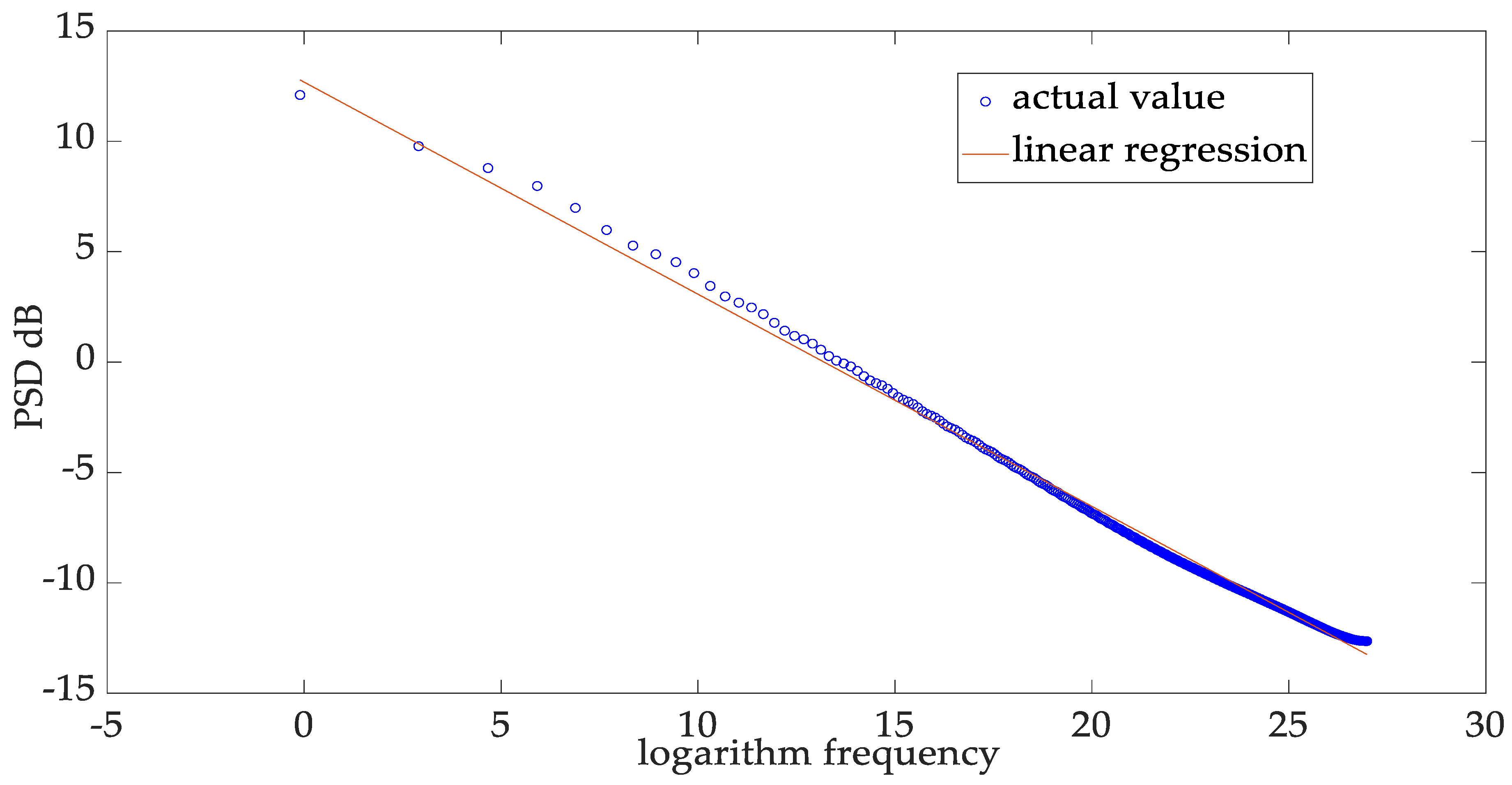
5.4. 1/f Characteristics in the Frequency Domain of the Lithium Battery
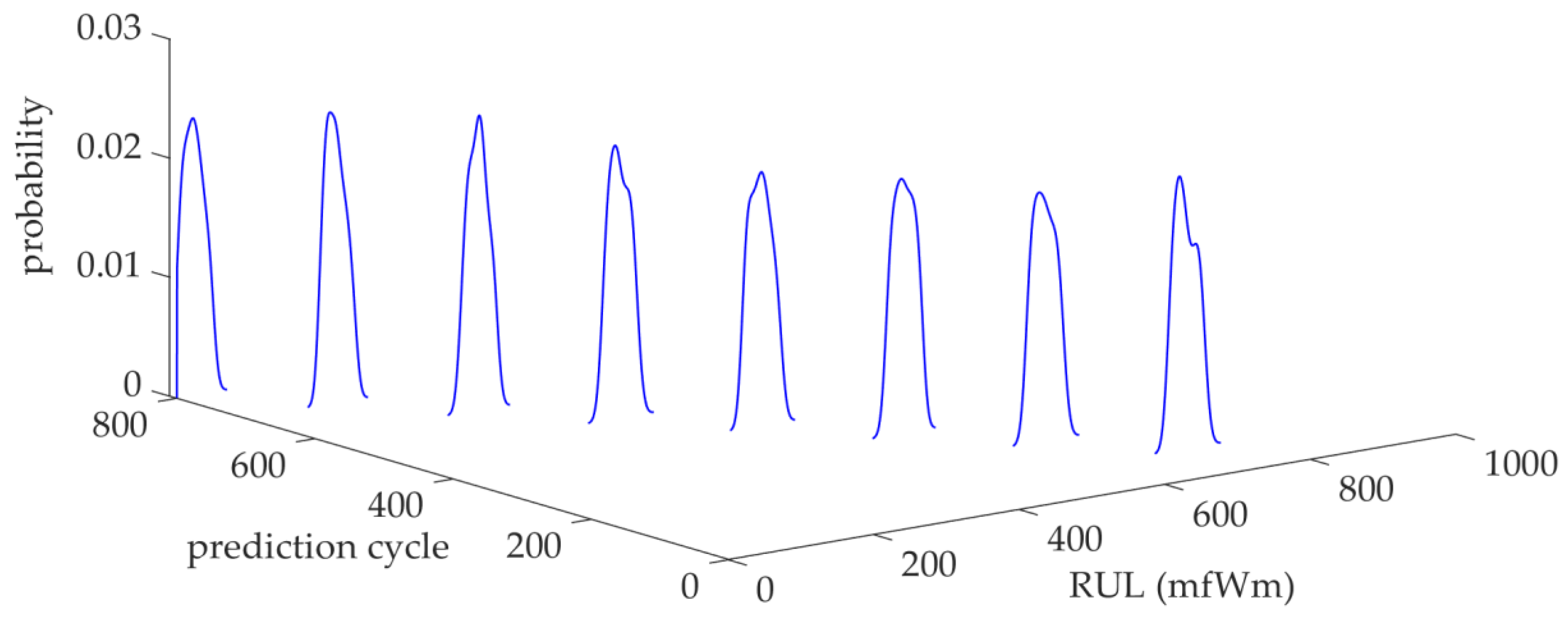
5.5. Performance Evaluation of the mfWm Predictive Model
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| RUL | remaining useful life |
| probability density function | |
| HI | health indicator |
| EOL | end of life |
| C-LSTM | cocktail long short-term memory network |
| GTWP | general time-varying Wiener process |
| FBM-D | fractional Brownian motion with dynamic properties |
| mfWm | multi-fractal Weibull motion |
| PSD | power spectrum density |
| FT | failure threshold |
| std | standard deviation |
| MAE | mean absolute error |
References
- Martins, L.S.; Guimarães, L.F.; Junior, A.B.B.; Tenório, J.A.S.; Espinosa, D.C.R. Electric car battery: An overview on global demand, recycling and future approaches towards sustainability. J. Environ. Manag. 2021, 295, 113091. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Song, W.; Zio, E. Fractional Lévy stable motion with LRD for RUL and reliability analysis of li-ion battery. ISA Trans. 2022, 125, 360–370. [Google Scholar] [CrossRef] [PubMed]
- Gao, H.; Yang, L.; Duan, H. The Local Ordered Charging Strategy of Electric Vehicles Based on Energy Routers under Three-Phase Balance of Residential Fields. Appl. Sci. 2022, 12, 63. [Google Scholar] [CrossRef]
- Xiao, B.; Lu, H.; Wang, H.; Ruan, J.; Zhang, N. Enhanced Regenerative Braking Strategies for Electric Vehicles: Dynamic Performance and Potential Analysis. Energies 2017, 10, 1875. [Google Scholar] [CrossRef] [Green Version]
- Arrebola, J.C.; Caballero, A.; Hernán, L.; Morales, J. Improving the Performance of Lithium-Ion Batteries by Using Spinel Nanoparticles. J. Nanomater. 2008, 2008, 659397. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Yang, Q.; Gao, Y.; Gao, D. Real-Time Fire Detection Method for Electric Vehicle Charging Stations Based on Machine Vision. World Electr. Veh. J. 2022, 13, 23. [Google Scholar] [CrossRef]
- Lyu, D.; Ren, B.; Li, S. Failure modes and mechanisms for rechargeable Lithium-based batteries: A state-of-the-art review. Acta Mech. 2019, 230, 701–727. [Google Scholar] [CrossRef]
- Hu, Y.; Miao, X.; Si, Y.; Pan, E.; Zio, E. Prognostics and health management: A review from the perspectives of design, development and decision. Reliab. Eng. Syst. Saf. 2021, 217, 108063. [Google Scholar] [CrossRef]
- Lee, J.; Wu, F.; Zhao, W.; Ghaffari, M.; Liao, L.; Siegel, D. Prognostics and health management design for rotary machinery systems—Reviews, methodology and applications. Mech. Syst. Signal Process. 2014, 42, 314–334. [Google Scholar] [CrossRef]
- Ge, M.-F.; Liu, Y.; Jiang, X.; Liu, J. A review on state of health estimations and remaining useful life prognostics of lithium-ion batteries. Measurement 2021, 174, 109057. [Google Scholar] [CrossRef]
- Meng, H.; Li, Y.-F. A review on prognostics and health management (PHM) methods of lithium-ion batteries. Renew. Sustain. Energy Rev. 2019, 116, 109405. [Google Scholar] [CrossRef]
- Thelen, A.; Li, M.; Hu, C.; Bekyarova, E.; Kalinin, S.; Sanghadasa, M. Augmented model-based framework for battery remaining useful life prediction. Appl. Energy 2022, 324, 119624. [Google Scholar] [CrossRef]
- Zhang, J.; Jiang, Y.; Li, X.; Luo, H.; Yin, S.; Kaynak, O. Remaining Useful Life Prediction of Lithium-Ion Battery with Adaptive Noise Estimation and Capacity Regeneration Detection. IEEE/ASME Trans. Mechatronics 2022, 1–12. [Google Scholar] [CrossRef]
- Patil, M.A.; Tagade, P.; Hariharan, K.S.; Kolake, S.M.; Song, T.; Yeo, T.; Doo, S. A novel multistage Support Vector Machine based approach for Li ion battery remaining useful life estimation. Appl. Energy 2015, 159, 285–297. [Google Scholar] [CrossRef]
- Pang, X.; Zhao, Z.; Wen, J.; Jia, J.; Shi, Y.; Zeng, J.; Dong, Y. An interval prediction approach based on fuzzy information granulation and linguistic description for remaining useful life of lithium-ion batteries. J. Power Sources 2022, 542, 231750. [Google Scholar] [CrossRef]
- Liu, D.; Zhou, J.; Pan, D.; Peng, Y.; Peng, X. Lithium-ion battery remaining useful life estimation with an optimized Relevance Vector Machine algorithm with incremental learning. Measurement 2015, 63, 143–151. [Google Scholar] [CrossRef]
- Wei, M.; Ye, M.; Wang, Q.; Xu, X.; Twajamahoro, J.P. Remaining useful life prediction of lithium-ion batteries based on stacked autoencoder and gaussian mixture regression. J. Energy Storage 2021, 47, 103558. [Google Scholar] [CrossRef]
- Xiang, S.; Zhou, J.; Luo, J.; Liu, F.; Qin, Y. Cocktail LSTM and Its Application into Machine Remaining Useful Life Prediction. IEEE/ASME Trans. Mechatron. 2023. [Google Scholar] [CrossRef]
- Zhang, X.; Qin, Y.; Yuen, C.; Jayasinghe, L.; Liu, X. Time-Series Regeneration With Convolutional Recurrent Generative Adversarial Network for Remaining Useful Life Estimation. IEEE Trans. Ind. Inform. 2020, 17, 6820–6831. [Google Scholar] [CrossRef]
- Zhang, J.; Tian, J.; Li, M.; Leon, J.I.; Franquelo, L.G.; Luo, H.; Yin, S. A Parallel Hybrid Neural Network with Integration of Spatial and Temporal Features for Remaining Useful Life Prediction in Prognostics. IEEE Trans. Instrum. Meas. 2023, 72, 1–12. [Google Scholar] [CrossRef]
- Zhang, J.; Li, X.; Tian, J.; Jiang, Y.; Luo, H.; Yin, S. A variational local weighted deep sub-domain adaptation network for remaining useful life prediction facing cross-domain condition. Reliab. Eng. Syst. Saf. 2023, 231, 108986. [Google Scholar] [CrossRef]
- Kong, J.-Z.; Wang, D.; Yan, T.; Zhu, J.; Zhang, X. Accelerated Stress Factors Based Nonlinear Wiener Process Model for Lithium-Ion Battery Prognostics. IEEE Trans. Ind. Electron. 2022, 69, 11665–11674. [Google Scholar] [CrossRef]
- Chen, Z.; Zheng, S. Lifetime Distribution Based Degradation Analysis. IEEE Trans. Reliab. 2005, 54, 3–10. [Google Scholar] [CrossRef]
- Li, Y.; Huang, X.; Ding, P.; Zhao, C. Wiener-based remaining useful life prediction of rolling bearings using improved Kalman filtering and adaptive modification. Measurement 2021, 182, 109706. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, M.; Shang, J.; Yang, C.; Sun, Y. Stochastic process-based degradation modeling and RUL prediction: From Brownian motion to fractional Brownian motion. Sci. China Inf. Sci. 2021, 64, 171201. [Google Scholar] [CrossRef]
- Li, M.; Zhao, W. On1/fNoise. Math. Probl. Eng. 2012, 2012, 673648. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Jiang, Y.; Li, X.; Huo, M.; Luo, H.; Yin, S. An adaptive remaining useful life prediction approach for single battery with unlabeled small sample data and parameter uncertainty. Reliab. Eng. Syst. Saf. 2022, 222, 108357. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Q.; Lu, W.; Peng, Y. A general time-varying Wiener process for degradation modeling and RUL estimation under three-source variability. Reliab. Eng. Syst. Saf. 2023, 232, 109041. [Google Scholar] [CrossRef]
- Li, X.; Ma, Y. Remaining useful life prediction for lithium-ion battery using dynamic fractional brownian motion degradation model with long-term dependence. J. Power Electron. 2022, 22, 2069–2080. [Google Scholar] [CrossRef]
- Gupta, N.; Kumar, A.; Leonenko, N. A Generalization of Multifractional Brownian Motion. Fractal Fract. 2022, 6, 74. [Google Scholar] [CrossRef]
- Song, W.; Duan, S.; Zio, E.; Kudreyko, A. Multifractional and long-range dependent characteristics for remaining useful life prediction of cracking gas compressor. Reliab. Eng. Syst. Saf. 2022, 225, 108630. [Google Scholar] [CrossRef]
- Zhang, H.; Zhou, D.; Chen, M.; Xi, X. Predicting remaining useful life based on a generalized degradation with fractional Brownian motion. Mech. Syst. Signal Process. 2018, 115, 736–752. [Google Scholar] [CrossRef]
- Pang, Z.; Li, T.; Pei, H.; Si, X. A condition-based prognostic approach for age- and state-dependent partially observable nonlinear degrading system. Reliab. Eng. Syst. Saf. 2022, 230, 108854. [Google Scholar] [CrossRef]
- Zhang, H.; Zhou, D.; Chen, M.; Shang, J. FBM-Based Remaining Useful Life Prediction for Degradation Processes with Long-Range Dependence and Multiple Modes. IEEE Trans. Reliab. 2019, 68, 1021–1033. [Google Scholar] [CrossRef]
- Wang, W.; Carr, M.; Xu, W.; Kobbacy, K. A model for residual life prediction based on Brownian motion with an adaptive drift. Microelectron. Reliab. 2011, 51, 285–293. [Google Scholar] [CrossRef]
- Ye, Z.-S.; Chen, N.; Shen, Y. A new class of Wiener process models for degradation analysis. Reliab. Eng. Syst. Saf. 2015, 139, 58–67. [Google Scholar] [CrossRef]
- Wang, H.W.; Xi, W.J. Acceleration factor constant principle and the application under ADT. Qual. Reliabil. Eng. Int. 2016, 32, 2591–2600. [Google Scholar] [CrossRef]
- Wang, H.; Ma, X.; Zhao, Y. An improved Wiener process model with adaptive drift and diffusion for online remaining useful life prediction. Mech. Syst. Signal Process. 2019, 127, 370–387. [Google Scholar] [CrossRef]
- Mantalos, P.; Karagrigoriou, A. Bootstrapping the augmented Dickey–Fuller test for unit root using the MDIC. J. Stat. Comput. Simul. 2012, 82, 431–443. [Google Scholar] [CrossRef]
- Kula, F.; Aslan, A.; Ozturk, I. Is per capita electricity consumption stationary? Time series evidence from OECD countries. Renew. Sustain. Energy Rev. 2012, 16, 501–503. [Google Scholar] [CrossRef]
- Maccone, C. Eigenfunction expansion for fractional Brownian motions. Il Nuovo Cimento B 1981, 61, 229–248. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Z. A long short-term memory neural network based Wiener process model for remaining useful life prediction. Reliab. Eng. Syst. Saf. 2022, 226, 108651. [Google Scholar] [CrossRef]
- Zhai, Q.; Ye, Z.-S. RUL Prediction of Deteriorating Products Using an Adaptive Wiener Process Model. IEEE Trans. Ind. Inform. 2017, 13, 2911–2921. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Y.; Zhou, D.; Xia, T.; Pan, E. Two-phase degradation data analysis with change-point detection based on Gaussian process degradation model. Reliab. Eng. Syst. Saf. 2021, 216, 107916. [Google Scholar] [CrossRef]
- Duan, B.; Zhang, Q.; Geng, F.; Zhang, C. Remaining useful life prediction of lithium-ion battery based on extended Kalman particle filter. Int. J. Energy Res. 2019, 44, 1724–1734. [Google Scholar] [CrossRef]
- Pang, Z.; Si, X.; Hu, C.; Zhang, Z. An Age-Dependent and State-Dependent Adaptive Prognostic Approach for Hidden Nonlinear Degrading System. IEEE/CAA J. Autom. Sin. 2022, 9, 907–921. [Google Scholar] [CrossRef]
- Ye, Y.; Shi, Y.; Saw, L.H.; Tay, A.A. Simulation and evaluation of capacity recovery methods for spiral-wound lithium ion batteries. J. Power Sources 2013, 243, 779–789. [Google Scholar] [CrossRef]
- Zhang, Z. A Nonlinear Prediction Method of Lithium-Ion Battery Remaining Useful Life Considering Recovery Phenomenon. Int. J. Electrochem. Sci. 2020, 15, 8674–8693. [Google Scholar] [CrossRef]
- Hu, H.H.; Xiang, Z.X.; Zhu, X.Y.; Zheng, S.Y.; Fan, W.J.; Fan, D.Y. Torque Characteristics Investigation of a Flux-Controllable Permanent Magnet Motor Considering Different Flux-Leakage Operation Conditions. IEEE Trans. Magn. 2022, 58, 8102606. [Google Scholar] [CrossRef]
- Attia, P.M.; Grover, A.; Jin, N.; Severson, K.A.; Markov, T.M.; Liao, Y.-H.; Chen, M.H.; Cheong, B.; Perkins, N.; Yang, Z.; et al. Closed-loop optimization of fast-charging protocols for batteries with machine learning. Nature 2020, 578, 397–402. [Google Scholar] [CrossRef] [Green Version]
- Dehghan, Y.; Sadrinasab, M.; Chegini, V. Probability distribution of wind speed and wave height in Nowshahr Port using the data acquired from wave scan buoy. Ocean Eng. 2022, 252, 111234. [Google Scholar] [CrossRef]
- Mason, D.M. The Hurst phenomenon and the rescaled range statistic. Stoch. Process. Appl. 2016, 126, 3790–3807. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Weibull | Gamma | Exponential | Log-Normal | |
|---|---|---|---|---|
| 0.6102 | 0.2375 | 0 | 0.25 | |
| 993 | 1283 | 10351 | 1811 |
| Maximum | Mean | Std | MAE | |
|---|---|---|---|---|
| mfWm | 0.0349 | 0.0246 | 0.0107 | 20.5 |
| GTWP | 0.0541 | 0.0310 | 0.0249 | 30.4 |
| FBM-D | 0.0509 | 0.0292 | 0.0238 | 27.6 |
| C-LSTM | 0.0434 | 0.0250 | 0.0176 | 22.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, W.; Gao, Y.; Chen, J.; Kudreyko, A.; Cattani, C.; Zio, E.; Song, W. Multi-Fractal Weibull Adaptive Model for the Remaining Useful Life Prediction of Electric Vehicle Lithium Batteries. Entropy 2023, 25, 646. https://doi.org/10.3390/e25040646
Deng W, Gao Y, Chen J, Kudreyko A, Cattani C, Zio E, Song W. Multi-Fractal Weibull Adaptive Model for the Remaining Useful Life Prediction of Electric Vehicle Lithium Batteries. Entropy. 2023; 25(4):646. https://doi.org/10.3390/e25040646
Chicago/Turabian StyleDeng, Wujin, Yan Gao, Jianxue Chen, Aleksey Kudreyko, Carlo Cattani, Enrico Zio, and Wanqing Song. 2023. "Multi-Fractal Weibull Adaptive Model for the Remaining Useful Life Prediction of Electric Vehicle Lithium Batteries" Entropy 25, no. 4: 646. https://doi.org/10.3390/e25040646