1. Introduction
Massive multiple-input multiple-output (MIMO) systems are well known as essential enablers for the future of wireless communication. An antenna array with many antennas enables time-frequency resources to be shared by all user terminals at the same time. Massive MIMO is better than traditional MIMO in many ways, such as making links more reliable and using less energy [
1]. Quadrature amplitude modulation (QAM) provides extra benefits for data transmission. Unfortunately, interference from multiple antennas becomes much worse as the size of the system increases, making uplink data detection a tough problem. As a result, to estimate a signal, advanced signal processing techniques are needed.
The MIMO data detection problem can be constructed as a linear system of equations. The maximum likelihood (ML) technique theoretically provides the optimal detection performance, but its computational cost is prohibitively high for massive MIMO systems. Therefore, suboptimal detectors with low complexity and strong detection performance are required in practical applications [
2]. Sphere decoder (SD) can achieve near-ML performance while requiring less computational complexity than ML detectors. Its computational complexity, however, is inconsistent with the large-scale MIMO problem [
3]. Belief propagation (BP) detectors provide the soft output in an iterative process via a factor graph and suffer less local minimum problems than other algorithms. However, BP-based algorithms show severe performance loss as the ratio of the number of receive antennas to the number of transmit antennas approaches one [
4,
5]. Moreover, as the number of antennas increases, the complexity of a BP detector itself becomes a burden when the number of antennas becomes larger. Zero forcing (ZF) is simple to implement but provides poor detection performance. However, the linear system of equations has a channel matrix of ill-determined rank, and Tikhonov regularization is a prominent method for solving this problem. A ZF detector with Tikhonov regularization, referred to as a minimum mean-square error (MMSE) detector, obtains a better performance–complexity tradeoff than nonlinear detection algorithms. In addition, linear MIMO receivers including ZF and MMSE detectors need to perform channel correlation inversion.
Matrix inversion requires a complexity of
(where
N is the system size), which is too high for large system implementation. To avoid the exact matrix inversion needed by linear detection in a MIMO uplink, various sophisticated techniques have been proposed, which can be generically divided into three categories: approximate matrix inversion methods, decomposition methods, and iterative methods [
6]. Neumann series expansion is applied to approximate matrix inversion using a series of matrix–vector multiplications, which is simple to implement in hardware but converges slowly [
7]. Newton iteration [
8] and Chebyshev iteration [
9] have been successively proposed to accelerate convergence. However, when the number of iterations exceeds one, their computational complexity exceeds that of exact matrix inversion [
10]. The complexity of decomposition methods such as Cholesky decomposition, Gaussian elimination, and QR decomposition (QRD) is
. Iterative methods such as steepest descent (SD) and conjugate gradient (CG) achieve rapid convergence, but each iteration requires
mathematical operations. Methods of coordinate descent (CD), such as Jacobi [
11], Gauss‒Seidel [
12], and successive overrelaxation (SOR), have slower convergence but have only
operations per iteration. The computational complexity of these iterative techniques is proportional to the number of iterations executed. Only if the ratio of base station (BS) antennas to user antennas (
) is large enough can satisfactory performance and a reasonable level of complexity be reached. However, a sufficient number of receive antennas may not be available in a practical system due to the constraints of antenna size, cost, and power consumption. Systems with
close to one can achieve better spectral efficiency when attaining large
and
. However, the performance of the linear detectors degrades dramatically. Excessive dimensionality reduction for the sake of computational reduction results information loss, and substantial performance degradation is unavoidable due to interference, particularly when
is of the same order as
. Furthermore, multiplication and division operations are required for these iterative methods. Numerical instability may occur during division operations [
13]. These operations are all thought to be difficult to implement in hardware [
14].
The dichotomous coordinate descent (DCD) algorithm is based on the coordinate descent method. It solves the normal equation by using variable step sizes with a power of two. With this algorithm, a linear system of equations can be solved with high computational efficiency. The algorithm is easy to implement in hardware because it does not require multiplications and divisions [
15]. DCD-based multiuser detectors have demonstrated a detection accuracy close to the single-user bound for binary phase shift keying (BPSK) symbols [
16,
17]. Better detection performance is achieved using box-constrained optimization [
18]. In [
19], a box-constrained DCD detector and its hardware architecture were proposed for complex-valued detection. Nevertheless, this architecture design was based on a serial structure and can only be suitable for small-scale systems. In [
20], a parallel FPGA architecture for a box-constrained MIMO detector based on DCD iteration is proposed for MIMO detection with tens/hundreds of antennas. The complexity of these DCD-like detection methods mainly depends on the number of antennas and the number of successful update iterations
. With a high
, DCD-based detectors show good performance for large-scale systems. However, the complexity burden requirement will become severe as the system size increases. To further reduce complexity without sacrificing detection capability, designing suboptimal detection algorithms with low complexity and high performance is still needed to construct practical MIMO systems.
To address this problem, a massive MIMO detector based on an iterated box-constrained DCD (BOXDCD) with a negative diagonal loading regularization is proposed. The idea is that the output of the BOXDCD algorithm with negative diagonal loading regularization provides a rough estimation of the m-ary quadrature amplitude modulation (M-QAM) symbols for massive MIMO systems and is taken as the initial input to the BOXDCD algorithm when updating the received signal vector. This procedure is repeated iteratively, achieving a significant performance improvement and an overall complexity reduction compared to the MMSE detector. Moreover, the proposed detector achieves much higher performance than the BOXDCD detector with the same . We provide a complexity–performance tradeoff for the proposed efficient massive MIMO detector compared with suboptimal MIMO detectors under a fully loaded system and show that the proposed method outperforms existing suboptimal detectors.
The remainder of the paper is organized as follows:
Section 2 describes the system model for the MIMO transmission system and briefly overviews the MMSE detector and iterated MMSE detector. The proposed detector based on an iterated box-constrained DCD algorithm with negative diagonal loading is presented in
Section 3. Numerical simulations are shown in
Section 4.
Section 5 concludes the work.
Mathematical notations: matrices and column vectors are denoted by bold uppercase and lowercase letters, respectively. The elements of the matrix and vector are denoted as and , respectively. The j-th column of is denoted as . The real and imaginary parts of a complex number are denoted by and , respectively. The inverse and conjugate transpose are represented by and , respectively. stands for an identity matrix.
4. Simulation Results
In this section, numerical results obtained by MATLAB simulations are presented. We consider a large-system limit in which and are tens to hundreds of antennas at a proportional rate . To assess the error-rate performance for the proposed INL-BOXDCD algorithm, we perform Monte Carlo simulations of a MIMO system adopting different forms of QAM under a Rayleigh flat fading channel. The simulation trials are . In this scenario, , . The simulation results are plotted as the bit-error-rate (BER) vs. the signal-to-Gaussian noise ratio (SNR).
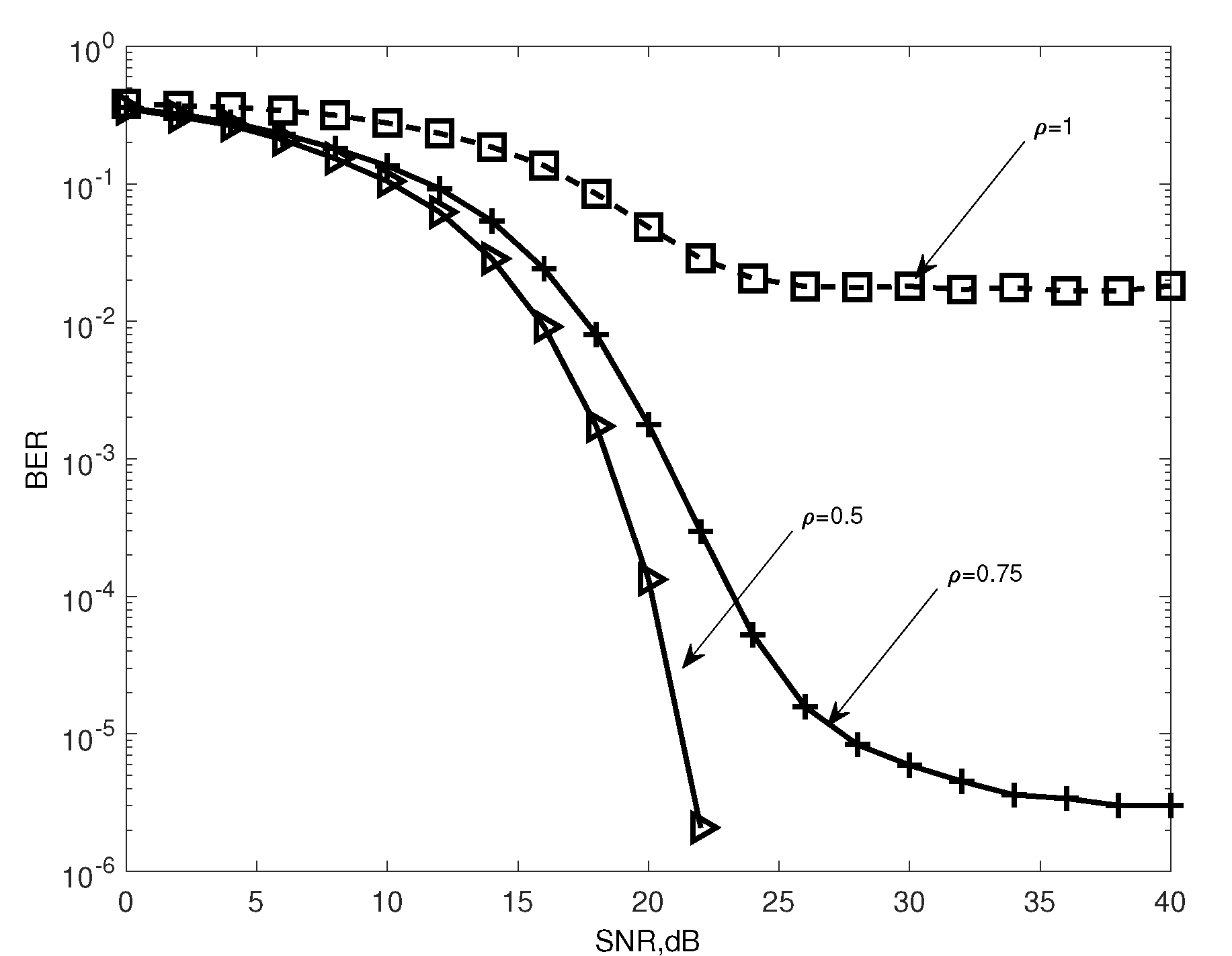
Figure 1 illustrates the detection performances of the INL-BOXDCD detector for 16QAM symbols for
and
with
. We can alter the condition number of the channel correlation matrix
by changing the relationship between
and
. When
, we address fully loaded MIMO systems, and the noise is magnified by a factor of a relatively large condition number. Under such conditions, the convergence property of INL-BOXDCD deteriorates. With the decreases in
, the performance of the INL-BOXDCD detector significantly increases. Increasing
V might mitigate the negative effects of approximation error.
Figure 2 depicts the effect of iterations
V on the BER performance of the INL-BOXDCD detector under 4QAM, 16QAM and 64QAM for a
MIMO system with
. For 4QAM symbol transmission (
Figure 2a), the INL-BOXDCD detector with one iteration provides a significant accuracy improvement over zero. However, after one iteration, the BER performance of the INL-BOXDCD detector can no longer be improved. The INL-BOXDCD detector for 16QAM and 64QAM signals with
shows poor performance. When
V increases to 10, 20 and 30, the BER gradually decreases. With a given
,
Figure 2b,c show that the INL-BOXDCD exhibits a BER floor that is reduced as
V increases.
Figure 3 shows the effect of
on the BER performance of the INL-BOXDCD detector for
,
and
MIMO systems. With a fixed
, the INL-BOXDCD displays a BER floor and the BER floor decreases when
increases. For a small value of
, the INL-BOXDCD detector for the
MIMO system offers better performance than the
and
MIMO systems. When
increases to
, the INL-BOXDCD detector with large-scale MIMO systems, such as the
and
systems, shows significantly better performance than the
MIMO system. When
further increases to
, the BER performance of the INL-BOXDCD detector for the
MIMO system is slightly worse than that of the
MIMO system but significantly better than that of the
MIMO system.
Figure 4 plots the BER performance of the INL-BOXDCD detector for a given SNR for a
antenna configuration. The performance of the MMSE, iterated MMSE and BOXDCD are also examined. The figure shows that the performance of the INL-BOXDCD detector improves significantly with increasing
and
V. The detection performance of the classical MMSE detector is inferior to that of the INL-BOXDCD detector. The INL-BOXDCD (
) detector provides a gain of approximately 3 dB over iterated MMSE
when BER is less than
. The BOXDCD detector with
provides poor performance. With increasing
, the detection performance of the BOXDCD detector improves. As
V increases from 1 to 3, the BER performance curve of the INL-BOXDCD detector with
gradually approaches that of the BOXDCD detector with
. At BER=
, the average complexity of the INL-BOXDCD (with
and
) is
, and the average complexity of the BOXDCD (with
) is
. When
, the computational complexity of the INL-BOXDCD detector is twice as high as that of the BOXDCD detector, while the INL-BOXDCD detector has a BER that is approximately 100 times lower after SNR
dB.
The average complexity of the proposed INL-BOXDCD algorithm for a
MIMO system is listed in
Table 1 and compared with that of the MMSE, iterated MMSE
, BOXDCD
and INL-BOXDCD
when BER =
. For
, the MMSE detector approximately requires
complex multiplication and addition operations. The average complexity of the iterated MMSE detector with
is
complex multiplications and additions. With a given
, the average computational complexity of BOXDCD is
real additions. For a given
and
, the average computational complexity of the INL-BOXDCD detector is
real additions. From
Table 1 and
Figure 4, we notice that the MMSE detector shows poor performance, while iterative MMSE has a better performance by increasing
V. When BER =
, the iterated MMSE requires 2 dB more than BOXDCD and INL-BOXDCD. The matrix inversion of iterated MMSE (and MMSE) requires high complexity
, which is calculated by counting the cost of the addition and multiplication operations. BOXDCD and INL-BOXDCD require only addition operations. The results also show that the proposed algorithm, INL-BOXDCD, has a much lower computational cost compared to BOXDCD by reducing
, while the two algorithms achieve comparable performance.
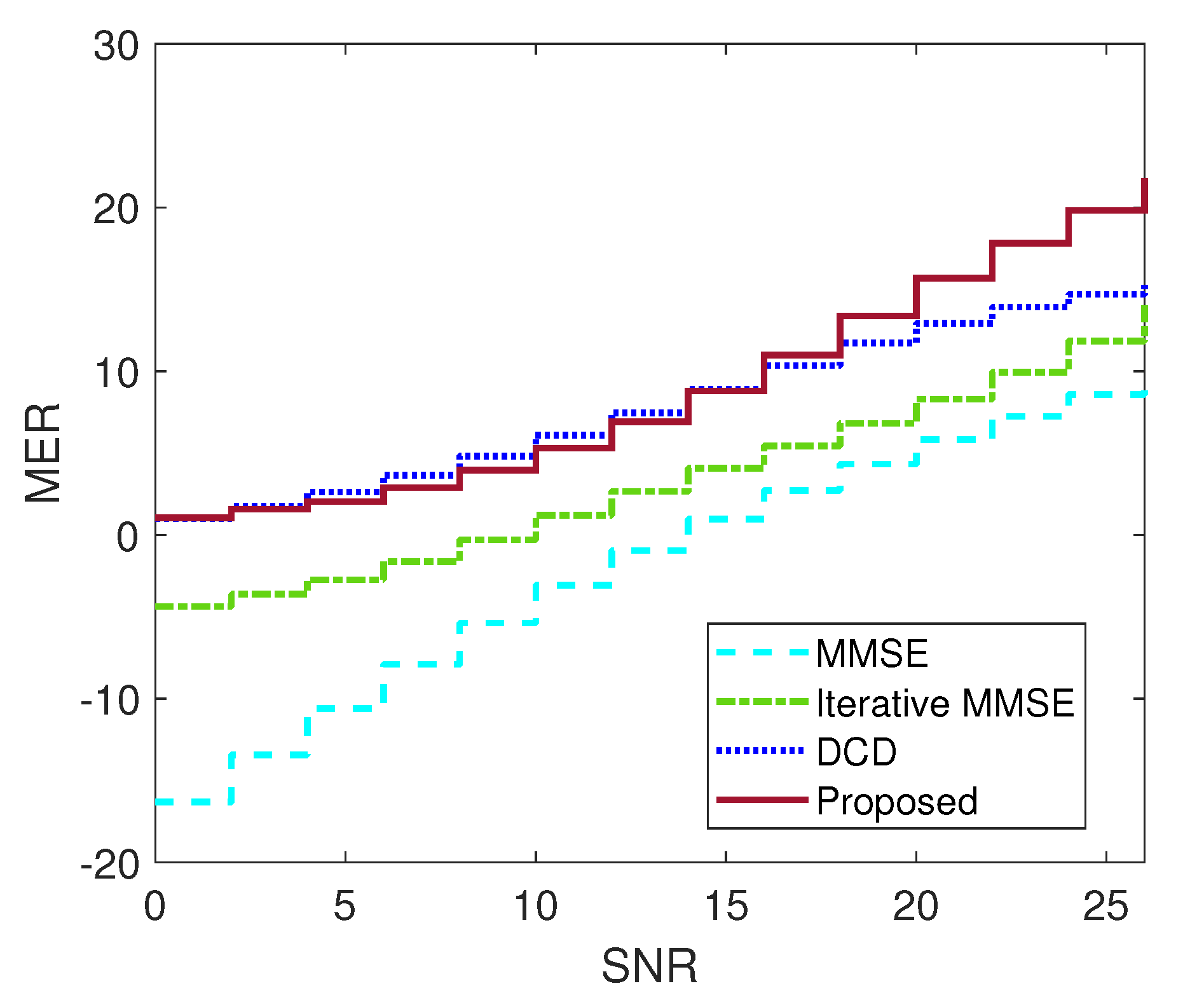
The modulation error ratio (MER) performance of MMSE, iterated MMSE, BOXDCD and INL-BOXDCD over 1000 16QAM symbols in a
MIMO system are shown in
Figure 5. The results show that for a large-scale system, box-constrained detectors offer better performance than MMSE-type detectors. The INL-BOXDCD shows a better performance than BOXDCD with
after 15dB, which is consistent with the BER verifications.
Discussion
The MMSE detectors provide a good soft decision for MIMO detection; however, they are difficult to implement in large MIMO systems. In addition, the box-constrained-based detectors can achieve significantly better performance than the MMSE detector in a large MIMO system [
19]. Iterated MMSE detectors avoid the BER floor while requiring a large complexity of
, which is not implemention friendly in massive MIMO systems. The INL-BOXDCD algorithm uses iterated BOXDCD algorithms with deregularization to solve normal equations. For a fixed
, the BOXDCD exhibits a BER floor at a high SNR. Increasing
reduces the BER floor. The performance and computational complexity of INL-BOXDCD mainly depend on the number of bits
, updates
and iterations
V. Using lower
and iterated BOXDCD algorithms, the INL-BOXDCD detector could achieve a good tradeoff between performance and complexity compared to only applying the BOXDCD detector. According to the BOXDCD algorithm FPGA design in [
20], the method requires 184, 210 and 223 slices for the system sizes of
,
and
in Xilinx Virtex-6 FPGA (XC6VSX475T-2FF1759). To achieve the same performance, the INL-BOXDCD algorithm can be performed by using a single BOXDCD block with less processing time. It might be an alternative way to solve a fully loaded MIMO system.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}