Vehicles serve as vital means of transportation in urban cities, necessitating increased intelligence, as the intelligence of a single car falls short of meeting the requirements for road safety, path planning, decision-making, and traffic efficiency. To address these challenges, the Internet of Vehicles (IoV) has been introduced, enabling communication and collaboration among vehicles, and playing a crucial role in slow-vehicle warnings, intersection collision warnings [
1], as well as congestion alleviation, emission reduction, and time saving [
2]. However, these networks face obstacles in terms of mobility and occlusion. Notably, when a vehicle is traveling at a speed of 120 km/h, a mere 1-second latency can result in a driving distance of 33 m, potentially leading to severe consequences. Initially, communication among vehicles relied on dedicated short-range communication (DSRC) technology [
3], which facilitated short-range communication with low latency [
4]. Nevertheless, in high-speed scenarios, vehicles often move out of the communication range, rendering DSRC inadequate. The advent of 5G technology has introduced the concept of ultra-reliable and low-latency communications (uRLLC) [
5], enabling vehicles to maintain communication even during high-speed mobility scenarios. To minimize long-term content access costs in vehicle-to-vehicle (V2V) networks, ref. [
6] considered a distributed multi-agent reinforcement learning (MARL)-based edge caching method and proposed a distributed MARL-based edge caching method (DMRE), where every agent adaptively learns optimal caching strategies in collaboration with others. Additionally, they integrated the advantages of deep Q-Networks into DMRE, resulting in a computationally efficient method named DeepDMRE, which utilizes neural networks to approximate Nash equilibria. Such deep Q-Networks were also considered in [
7], to explore the integration of reconfigurable intelligent surfaces (RIS) with unmanned aerial vehicles (UAVs) in the downlink of non-orthogonal multiple-access (NOMA) networks. They proposed a joint optimization scheme using deep Q-networks to maximize system capacity, while considering UAV energy constraints and demonstrating significant improvements in system capacity.
Network coding [
8] offers a promising solution for enhancing the performance of communication systems in V2V networks. By employing network coding techniques, intermediate nodes in the network can encode the received messages before transmitting them to the next hop, and the sink node decodes the received messages to reconstruct the original information. Ref. [
9] proposed the use of XOR network coding in fault-tolerant dynamic scheduling and routing algorithms for time-sensitive in-vehicle networks (IVNs), to increase throughput, reliability, and robustness. Experimental results demonstrated that the XOR network coding scheme outperformed the frame replication and elimination for reliability (FRER) mechanism in terms of schedulability, flow, and response time, because the FRER mechanism tends to over-utilize the available bandwidth, whereas XOR network coding provides a better performance without excessive bandwidth usage. Ref. [
10] expanded upon the security and privacy considerations in V2V networks as the number of vehicles accessing the network increases and proposed a comprehensive scheme that combines network coding, relay collaboration, and homomorphic encryption. The scheme ensures that the original information remains inaccessible to relay nodes, except for the intended target vehicle node. It also protects against potential collusion attacks, preventing conspiratorial attackers or multiple relay nodes from recovering the original information. Theoretically, such schemes guarantee the confidentiality, privacy protection, and anti-collusion capabilities of V2V networks. In [
11], F. Ye et al. adopted network coding in vehicular ad hoc networks (VANETs) by modeling platoon vehicles driving in the same direction on a highway as a 1-D lattice network, in which a single source node aims to disseminate messages to all other vehicles. They analyzed the theoretical upper bound of the benefits achieved through network coding and conducted simulations to demonstrate the performance superiority over random broadcasting using Rayleigh fading wireless channels. F. Liu et al. [
12] extended the data dissemination in VANETs in [
11] to a two-way lane scenario by modeling the network as two separate 1-D lattice networks, corresponding to the two directions of traffic flow. They divided the dissemination into the
encountering phase and the
separated phase, determined by whether the broadcasting coverage areas of the two disseminators overlapped, which means vehicles traveling in both direction can communicate with both disseminators simultaneously. They analyzed the impact of the opposite direction over the traditional one-way lane model and showed that two disseminators traveling in opposite directions can enhance the speed of data dissemination. Ref. [
13] compared three methods in a highway data mulling scenario, with vehicles from the opposite direction as data mutes to transmit large multimedia files, modeled as a
coupon collector problem, and among which the network-coding-based strategy outperformed erasure-coding and repetition-coding strategies. The literature [
14,
15,
16] shows that network coding can improve reliability and throughput, but it fails to deal with dynamic situations where the vehicle volume increases rapidly and the network structure becomes complex. Therefore, random linear network coding (RLNC) [
17] has garnered significant attention, particularly for its ability to operate without prior knowledge of the network topology. RLNC involves random coding coefficient selection from a finite field and performing linear operations on the packets. As the vehicular scale increases, the random selection of RLNC encoding coefficients within a finite field obviates the need to account for variations in node quantity and network topology within this method. By receiving a sufficient number of packets with independent coefficients at the sink, the original information can be decoded at source, which enables transmitting content over wireless vehicle communications with lossy links and that are highly dynamic. Ref. [
18] proposed a RLNC scheme for data transmission in a one-way lane V2V network, modeled as a multi-source multi-relay single-sink broadcasting network, to reduce latency and enhance the network robustness. In this one-way lane V2V communication scenario, the leading vehicles relay the detected road conditions and critical safety alerts to those following behind, affording them sufficient time for well-informed decision-making. This type of information, with its small data payload, facilitates swift transmission with no node departures in multi-round communication processes, as assumed in [
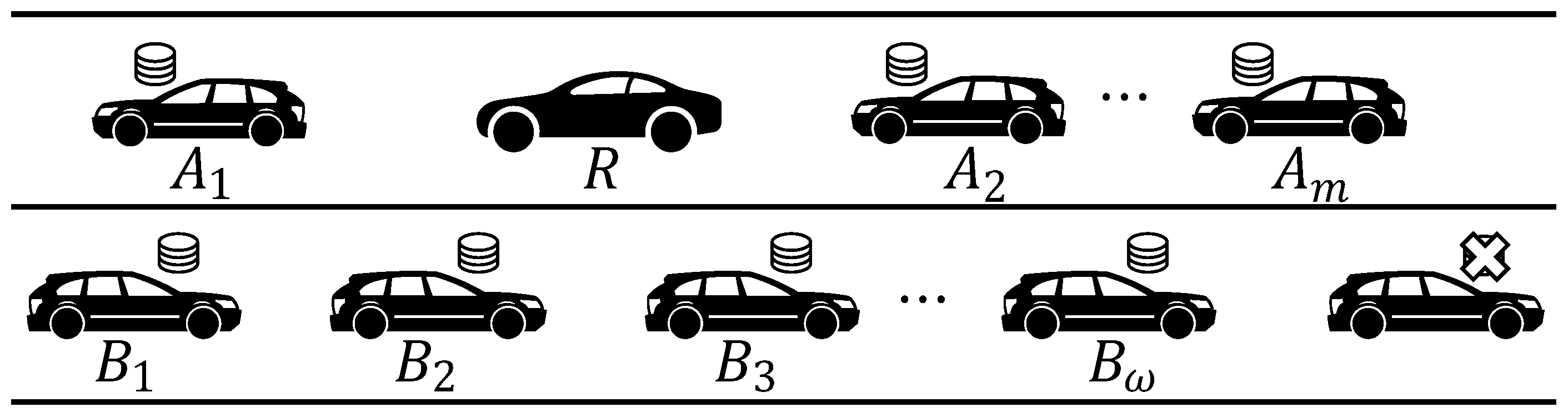
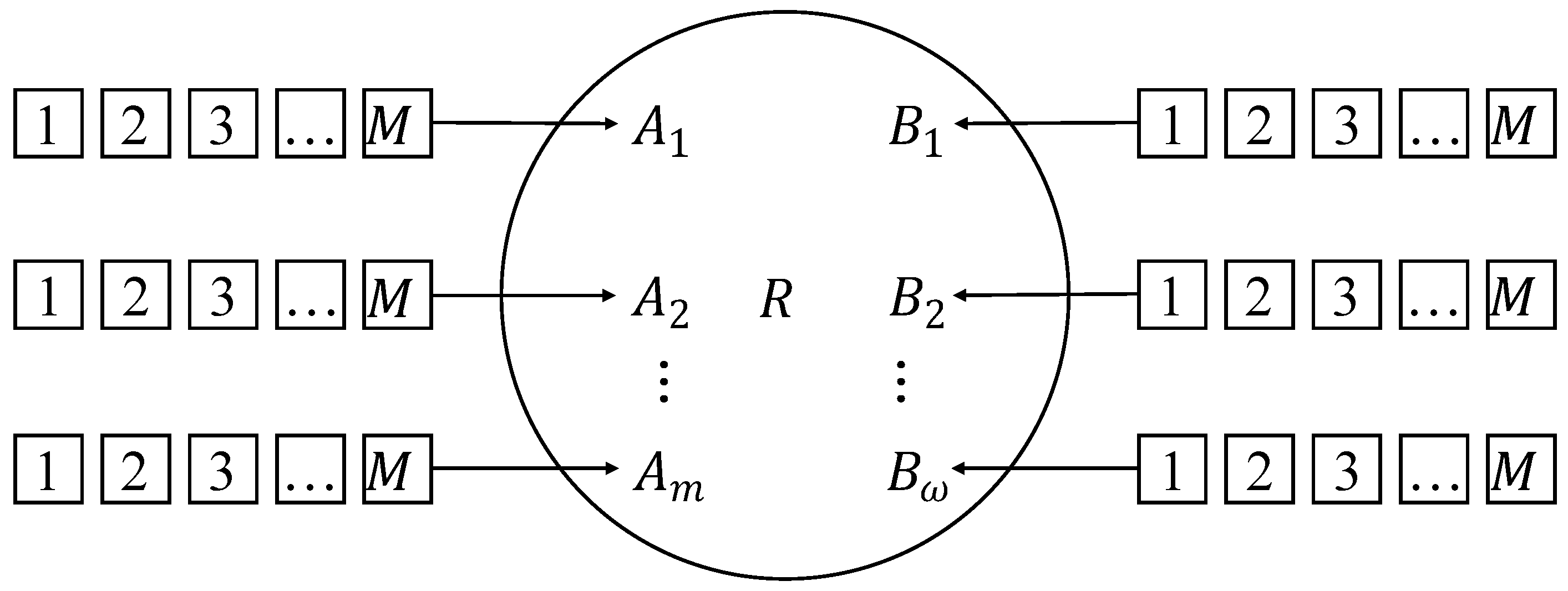
18], and implies a static and unchanging network topology. This may not align with the evolving landscape of intelligent transportation. In particular, with the increasing demand for in-vehicle entertainment experiences, expediting the transmission of large-scale data from nearby vehicles has become essential. Given the significant data volume involved, this study explores the utilization of vehicles in the opposite lane to establish a framework for bidirectional V2V large-scale data transmission over an extended period. During prolonged communication sessions for large-scale data transmission, nodes at high speeds tend to exit the communicable range of receiving vehicles, leading to dynamic changes in the network topology over multiple rounds. In this extended two-way lane large-scale data transmission scenario, the network is modeled as a multi-source single-sink network with a dynamic topology, where cars may enter or leave the communication range, resulting in a varying number of sources each round. The destination car node receives information from cars traveling in both the same and opposite directions. By utilizing RLNC in this dynamic two-way lane model, the proposed scheme enhances throughput and robustness, without relying on a specific network topology.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}