1. Introduction
Dynamical systems theory has provided multiple tools and techniques to investigate athletic performance. By dynamics, we mean the time-varying interactions between the person and environment while executing a task to different levels of performance [
1]. Three useful methods to quantify dynamical performance are its ‘phase portrait’ (a geometric description of how system variables interact with each other over time), the ‘persistence’ of the dynamics (the tendency to continue a current kinematic trend), and the ‘irregularity’ of the dynamics (how fluid the dynamical control is).
Although dynamical techniques are common in applied mathematics and in biological time series [
2] and biomechanics [
3,
4], they have had more limited use in sports as they are applied mostly to cyclical behavior like walking and running [
5,
6,
7,
8]. Here, we extend the application of nonlinear dynamics analysis to the domain of discrete movements, focusing on the intricate bow-draw movement.
Archery is an exemplary subject for our investigation due to its unique blend of physicality, mental focus, and historical significance as the bow and arrow could be among the earliest examples of complex projectile weaponry [
9,
10] and shooting arrows demand a greater level of advanced executive functions within the brain when compared to tasks involving spear-throwing [
10]. The archer’s quest for mastery transcends the boundaries of mere physical performance; it delves deep into the realms of cognition and motor control [
11,
12], and it demands athletes to gain focus and consistency in their movement [
13].
In addition, prior studies of archery focus on electromyographic signals [
14,
15,
16,
17], posture and stability [
18,
19], reaction times [
20], or effects of eye dominance [
21]. However, they do not take a truly dynamical approach.
Here, we specifically study the dynamical features of bow-draw motions to quantify how professional archers attain improved performance. By comparing the dynamics of performance between professional and neophyte archers in the context of the bow-draw movement, we aim to study the differences in motor control strategies and provide a proof of principle for the application of nonlinear dynamics analysis in archery sports. Through this interdisciplinary approach, we gain insights into archery mechanics and a broader understanding of human motor control, focus, and cognitive processes during discrete movements in sports.
We find professional archers exhibit movements with less dispersion in their motion dynamics, likely due to more active corrections and more fluid dynamical control compared to neophytes.
3. Results
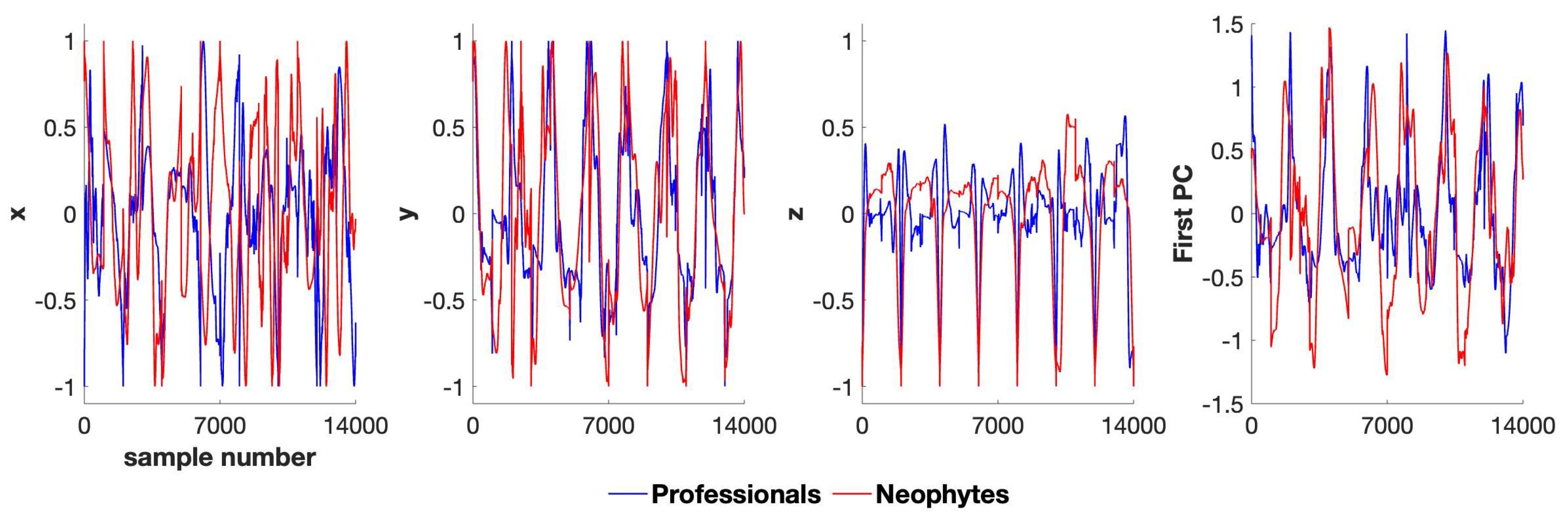
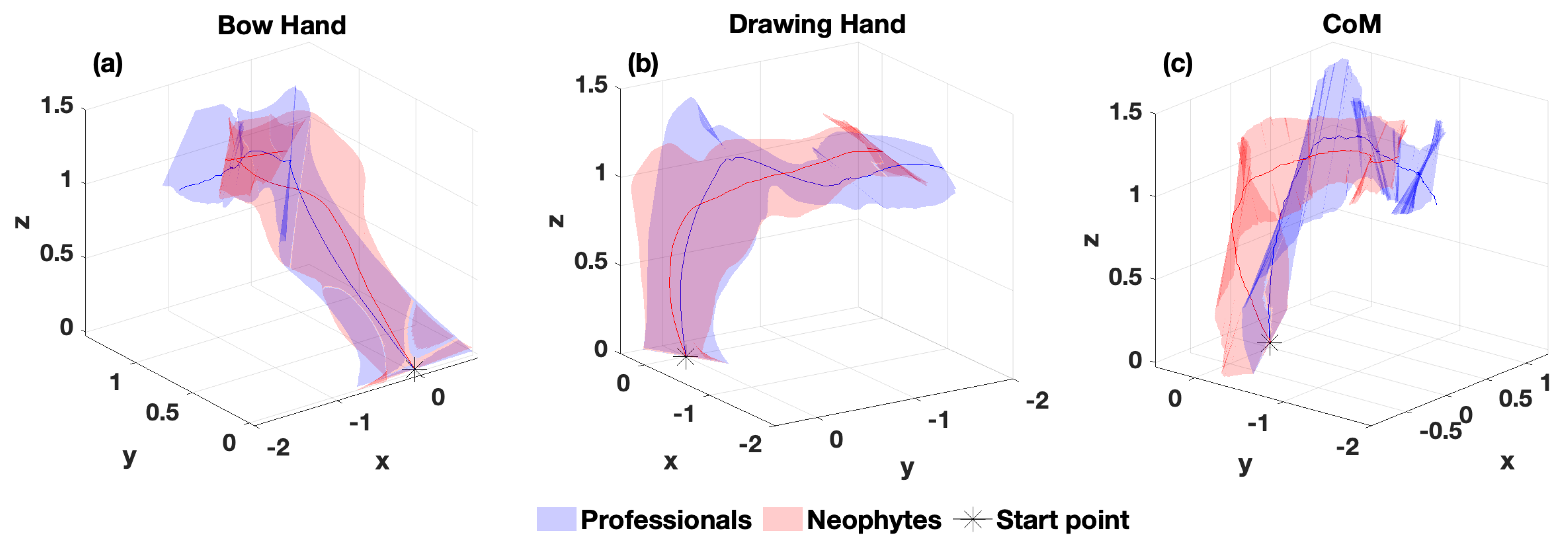
The mean trajectories of all body parts were plotted, and the area of ±standard deviations was shaded (
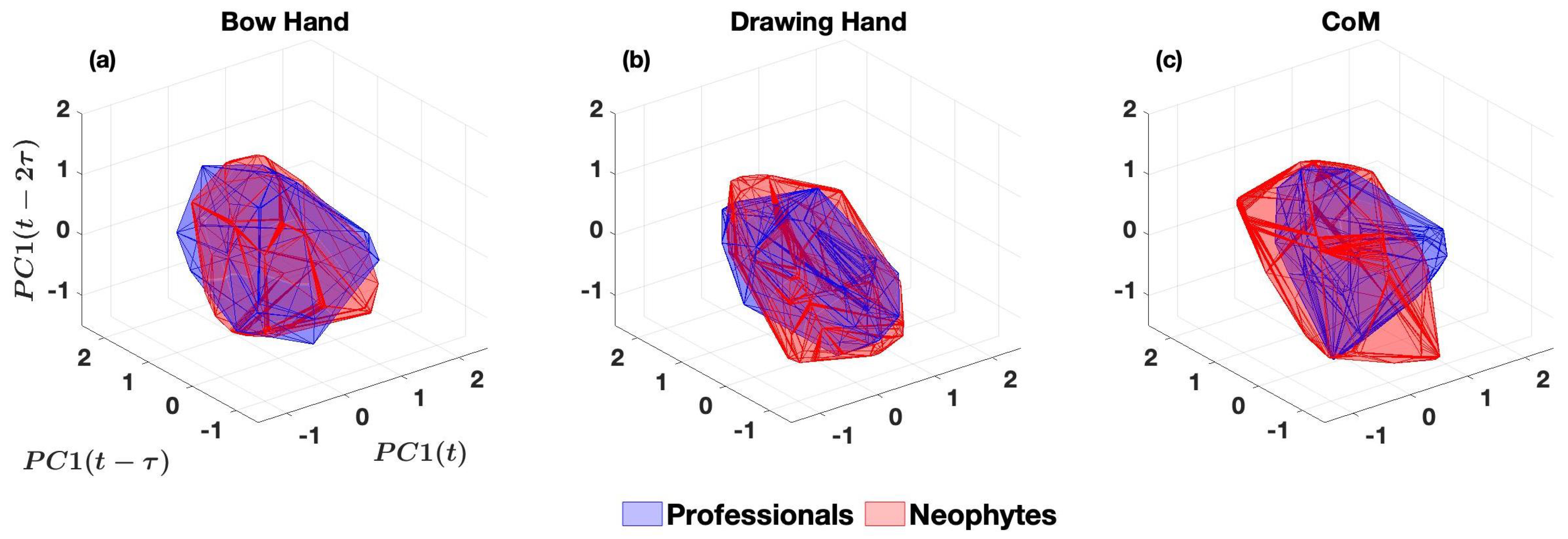
Figure 4). Trajectories generally reveal a difference between the two groups. To investigate dynamical differences between professionals and neophytes, phase portraits were plotted for the first PC of the concatenated time series (
Figure 5).
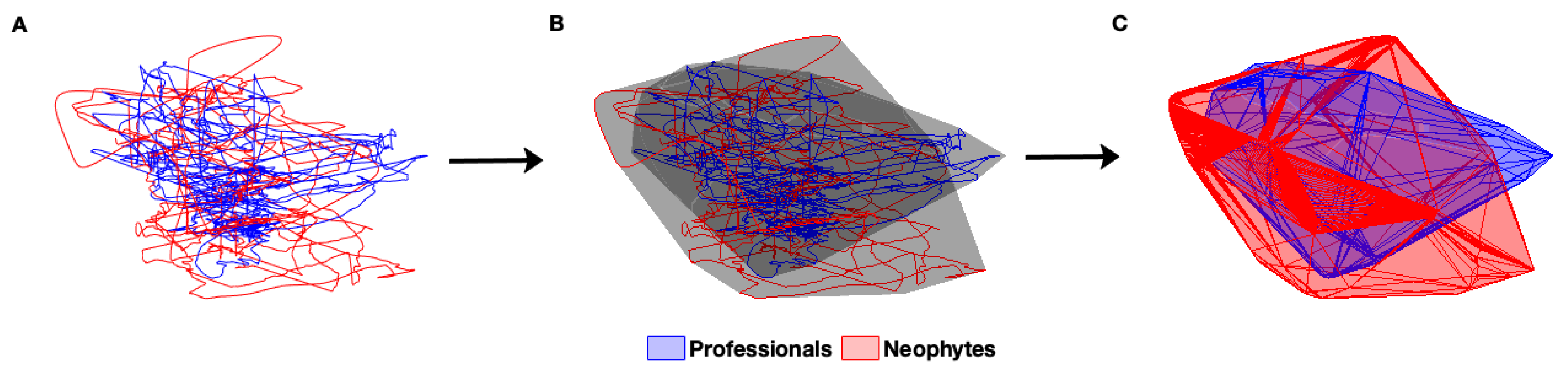
All body parts show less dispersed dynamic states (i.e., tighter control) in professionals compared to neophytes. We used the volumes of the convex hulls to measure the dispersion for dynamic states of participants’ control during the bow-draw motion (
Table 3). Based on the volumes, all three body parts have smaller dispersion in professionals, and the CoM has the greatest difference.
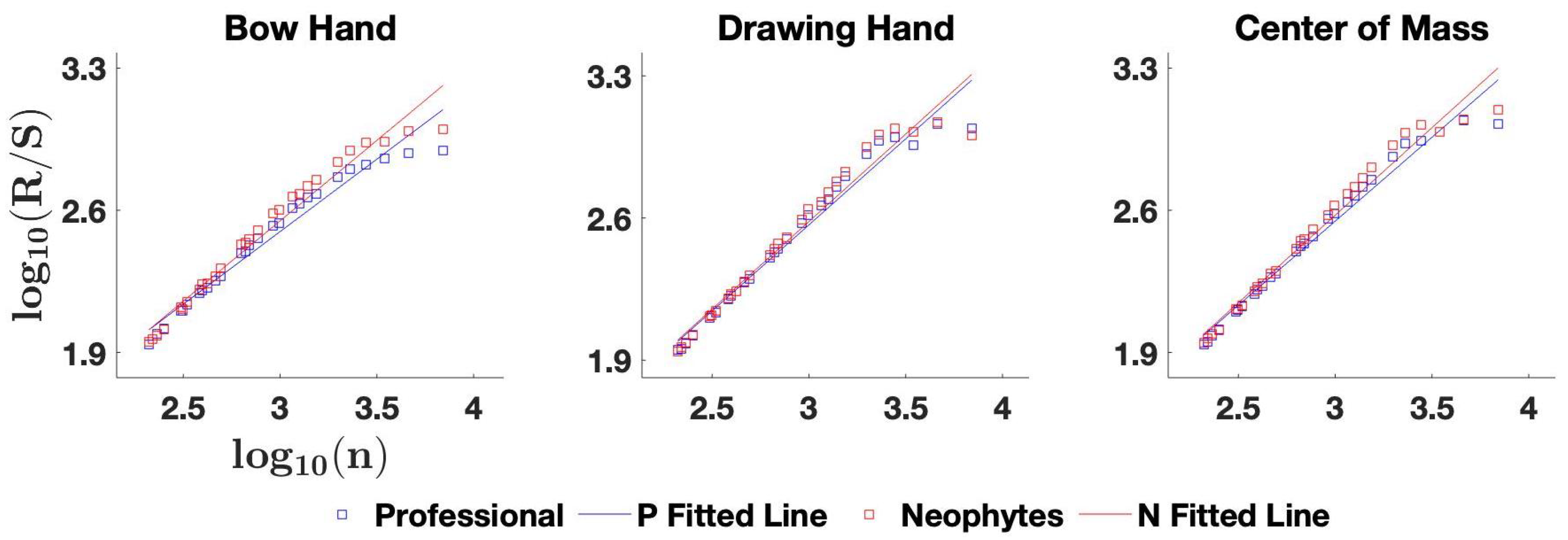
Hurst exponent values indicate a more persistent drawing behavior in the bow hand and CoM in professionals than neophytes (see
Figure 6). A time series with
is considered persistent, and the closer to one the
H value is, the more persistent the time series is. All of the series in this paper were persistent (
Table 4), and the
H values for the professionals were smaller in all body parts for the professionals compared to the neophytes, but bigger differences were for the bow hand and the CoM, which shows a less persistent control (i.e., more active correction) for the professionals that makes their bow draw more distinctive.
SampEn values were smaller for all body parts in the professionals compared to neophytes, with bigger differences in the drawing hand and center of the mass, indicating that professionals have a less regular drawing style.
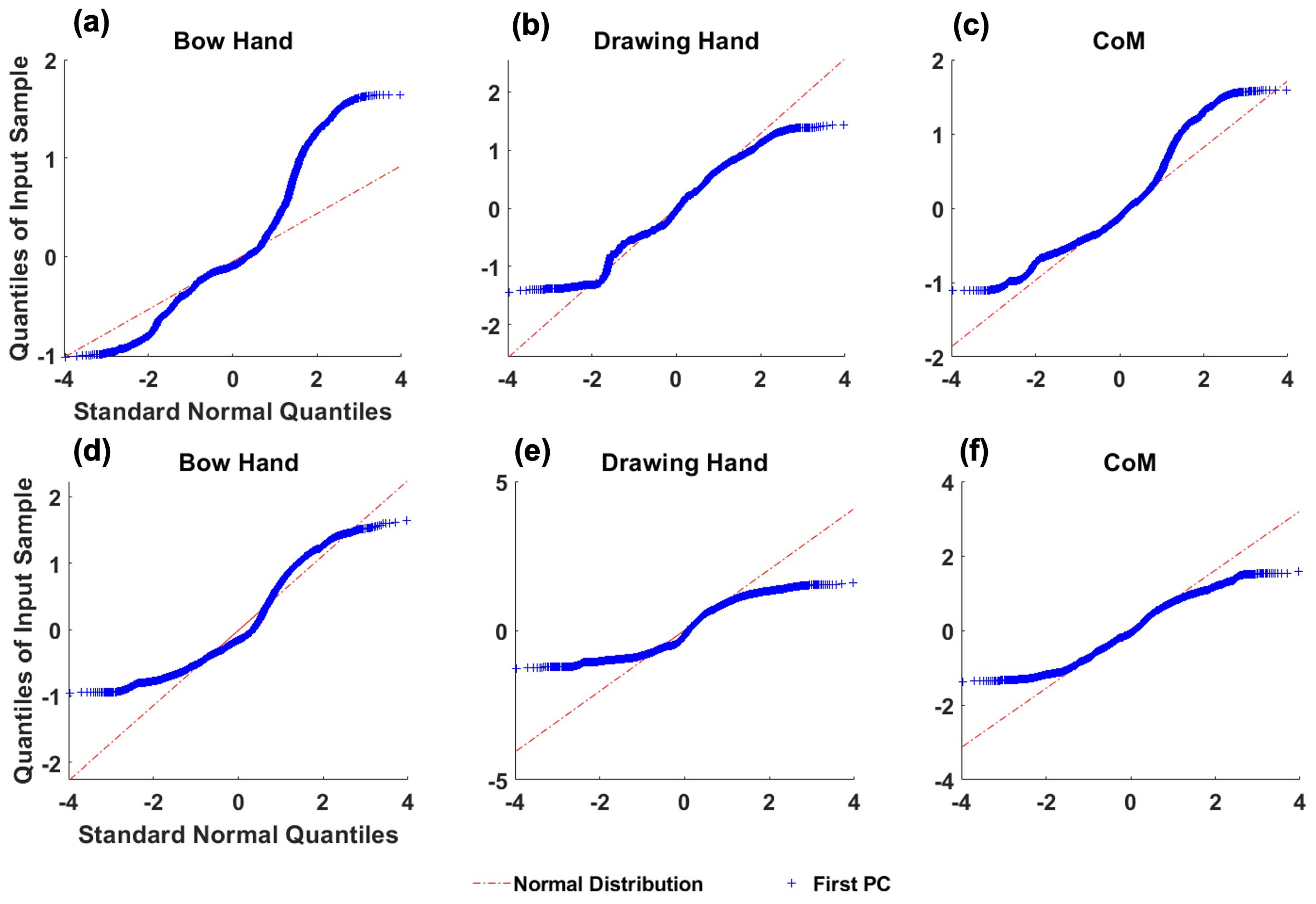
Each population (professional or neophyte) is characterized by a single concatenated time series of its participants. To validate our results, we employed bootstrapping to generate 1000 resampled datasets from each population to estimate the underlying distribution of the analyzed signals. Bootstrapping is, therefore, a computational means to enhance the power of statistical tests by simulating data collection in many more participants with similar simulated behavior as the actual participants. We subsequently repeated our analyses and used t-tests to estimate the statistical robustness of differences in test statistics among the resampled groups. Remarkably, except for the bow hand’s sample entropy (i.e., 1 out of 9 test statistics), all other comparisons yielded statistically significant differences (p-value < 0.01), strongly suggesting that the differences in the features from the actual professional and neophyte participants are indeed real, despite the limited number of subjects.
4. Discussion
As expected from their skill levels, there were differences in how professional and neophyte archers executed the bow-draw motion. However, our contribution is to be able to quantify the
dynamical features that can capture those differences for this discrete (i.e., non-cyclical) bow-draw task. We show this from a variety of perspectives that include
qualitative between-groups differences in the normalized 3D trajectories (
Figure 4), and
quantitative differences illustrated by dynamical time-series analyses: phase portraits (
Figure 5) and Hurst exponents (
Figure 6 and
Table 4) and sample entropy (
Table 5).
It is known that postural stability is a trainable attribute that can be enhanced through consistent practice, as demonstrated in studies by Jagdhane et al. (2016) [
33] and Paillard (2017) [
34]. In archery, specifically, an examination of postural balance during the aiming phase has revealed that better performance in professional archers, compared to their less-skilled counterparts, can be attributed to reduced postural sway characteristics. Our findings of lower dispersion (i.e., less variability and thus reduced sway) in the movement of the center of mass and hands for the professionals compared to the neophytes agree with those findings [
18,
19,
20,
35,
36]. Our results critically extend those statistically based studies by revealing that differences in the dynamics of bow-draw motion between professional and neophyte archers can be attributed to different
motor control strategies. This is because dynamical features such as smaller state space dispersion, more active corrections (less persistence in Hurst exponent analysis), and less regularity (in sample entropy) also have control of theoretical implications and interpretations.
Moreover, this work also serves as proof of principle that such dynamical time-series analyses can be applied to discrete athletic movements. Historically, dynamical systems analysis has been applied mostly to continuous motions such as quiet stance [
37], gait [
38,
39], postural control [
40] and running [
41]. This is particularly useful in sports because many sports center around discrete actions. We note this because, before this work, most of these analyses were applied to inherently cyclical sports such as walking, running, and swimming.
Our preprocessing of their time series made applying these methods to the discrete bow draw possible. In particular, we first resampled, normalized, and demeaned the signals to prevent bias due to participant anatomy and movement duration differences. We then concatenated each instance of a movement from each participant group (reversing every other movement). This created a continuous time series amenable to these analyses that represented each participant while producing a balanced and long-enough time series representative of each group. This preprocessing of the time series from individuals’ motion into a single 1D time series provides only one value for the convex hull’s volume and Hurst exponent for each group. Nevertheless, this single number represents each group and lets us compare them as a group. Comparisons of individual subjects were not our goal.
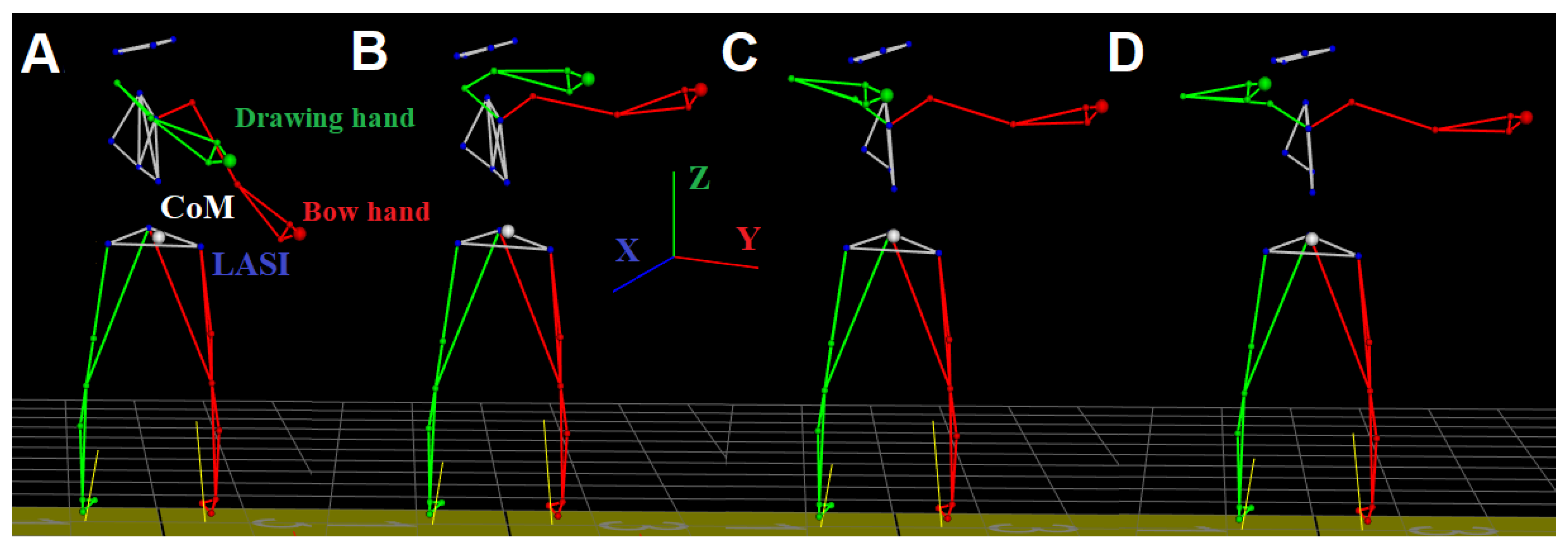
Before interpreting our results, it is important to state some particular limitations of our project. As shown in
Figure 1, only the experts completed the task by releasing the arrow (stage D of the shot cycle). This was imposed for the sake of the safety of the neophytes, as the release phase can be dangerous. Therefore, neophytes only reached the Aim phase (stage C) before relaxing. However, this does not affect our analysis of the bow-draw movement as the Aim phase is the end of the same. In addition, before performing the bow draw, the neophytes’ training consisted only of watching a professional archer perform the bow draw and release in silence. Moreover, they did not receive additional instruction, and we only analyzed their first motion for which markers were least occluded. The first trial analyzed only a truly naïve shot. Offering instruction would have added to the confound of learning, which was not the goal of our study. Although we expected this lack of formal instruction could result in greater inconsistency in the neophytes than in the professionals, this did not wash out-group differences, as demonstrated by
Table 3 and
Table 4. In addition, the purely visual exposure to the task before their bow-draw attempts emphasized learning by demonstration in the neophytes. The consistency we found in their movements (see
Table 4) may come from their perception of the most salient visual features of the bow draw, as opposed to the details of motor performance of the task. Regardless of whether the task was being imitated at a perceptual or motor level by the neophytes (i.e., we cannot espouse either at this point), we find differences in the motor performance of the task across groups as described below. Lastly, we did not study, and therefore did not test for, the difference in dynamic performance between the sexes. All participants could easily draw the 30 lb. draw weight, and the average and standard deviation in weight and height between the two groups were similar (except for a greater standard deviation in the neophyte height). Future work that is properly powered for this comparison can assess differences in motor control between the sexes in this sport.
Phase portraits are geometrical representations of the transitions in the dynamical states of a system. Therefore, the volume of their convex hull represents the breadth (dispersion) of its dynamics. Professionals exhibited phase portraits with smaller volumes, indicating that the underlying dynamics of their motion were controlled to have less dispersion—which can be interpreted as having tighter control over the range of positions, velocities, and accelerations of their body parts.
A Hurst exponent of 0.5 represents a truly random Brownian motion. A value closer to 1.0 then quantifies ‘persistence’ in a time series (i.e., the tendency to continue the current trend of a movement). The Hurst exponents we found show that professionals are less persistent as a group (closer to 0.5) compared to the neophytes (closer to 1.0). This can be interpreted as professionals implementing more frequent and minute corrections, resulting in shorter movements.
This study utilizes Sample Entropy (SampEn), a modified adaptation of Approximate Entropy, as a quantitative metric for gauging complexity and irregularity within time series while circumventing the influence of self-similarity inherent to Approximate Entropy. Higher SampEn values indicate more complexity, signifying lower regularity within the time series. Our comprehensive analysis consistently reveals that professional archers exhibit higher sample entropy values across all three body parts under scrutiny, indicating more complexity than neophyte archers. The higher sample entropy values observed for the professional archers can manifest from a heightened adeptness in orchestrating a fluidic and precisely directed bow-draw motion. We conclude that professional archers exhibit tighter and finer control over their discrete bow-draw movements’ more fluid (i.e., less regular) dynamics. Although differences between these groups were expected, our work provides proof of principle of how well-established dynamical analyses can be used to quantify and compare the dynamics of discrete movements in sports.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





