
Multiscale Dense U-Net: A Fast Correction Method for Thermal Drift Artifacts in Laboratory NanoCT Scans of Semi-Conductor Chips

Abstract
:1. Introduction
- (1)
- We propose a deep learning framework for nanoCT drift artifacts correction, which can directly correct the reconstructed slices without processing the original projections. Compared with traditional correction methods, the proposed framework completes the correction in less than 3 s, speeding up the correction time by three orders of magnitude. In addition, the framework exhibits optimal robustness in the presence of high noise.
- (2)
- Through the analysis of ablation experiments, we observe that some components can significantly improve the correction performance of drift artifacts. Although the components are used for drift artifacts correction in nanoCT, they may lead to new insights for image correction in other fields.
- (3)
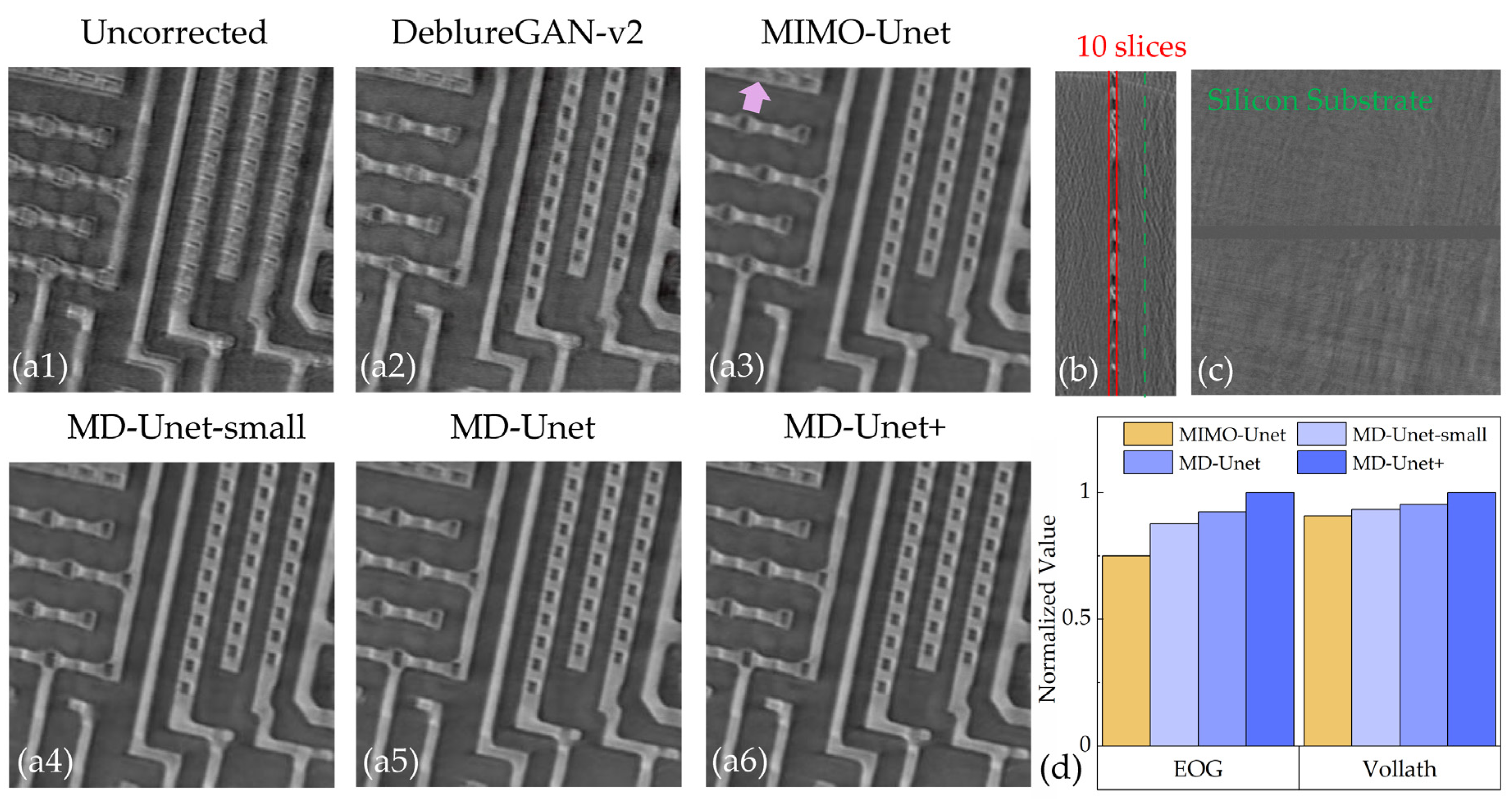
- In the chip dataset, the proposed network achieves superior performance compared to MIMO-Unet in fewer parameters (MD-Unet-small has 60.4% of parameters in MIMO-Unet).
2. Related Work
2.1. Drift Artifacts Correction Method Based on Reference Projections
- (1)
- Additional scanning (usually 10% of the original number of projections) is required to construct the reference projections, which can reduce correction efficiency.
- (2)
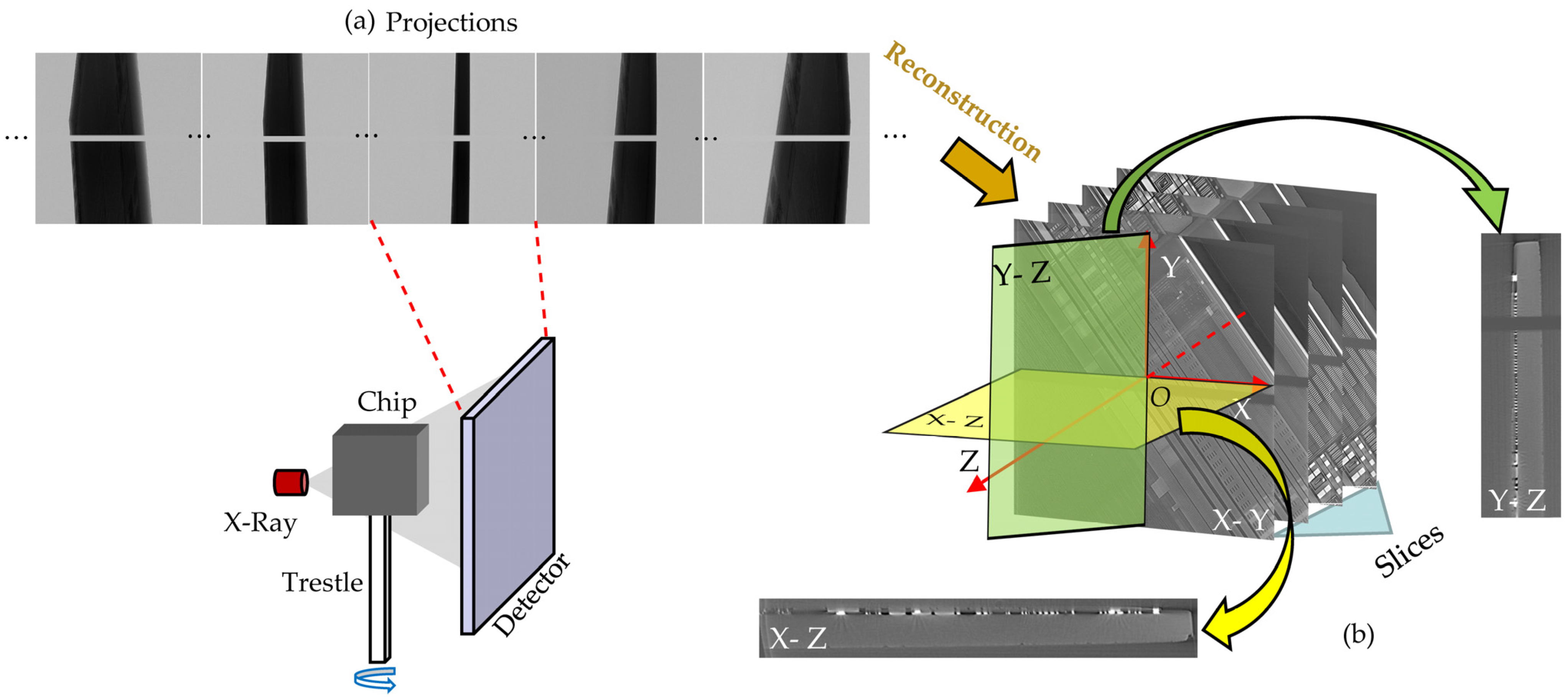
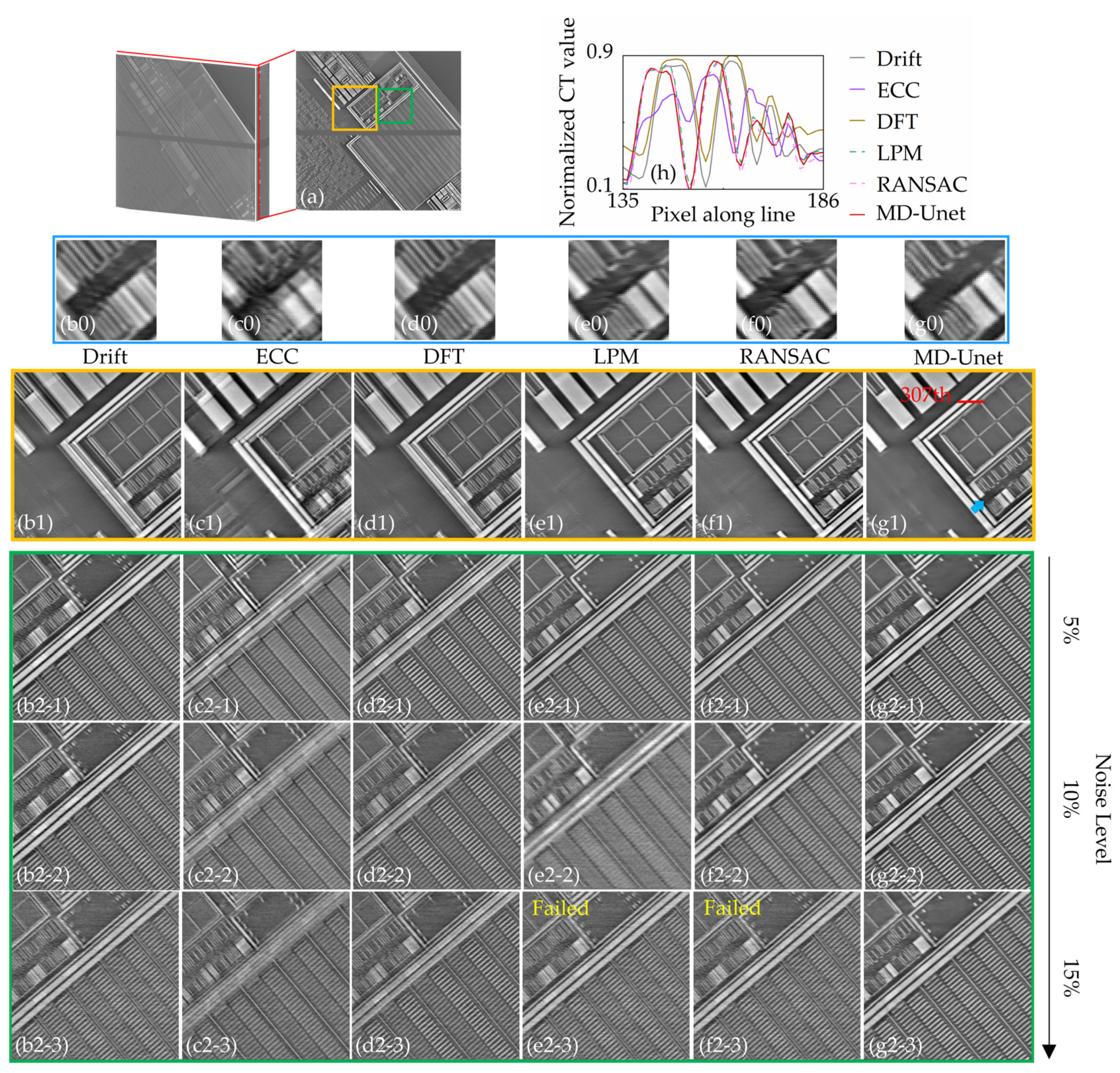
- Manual work is required to improve correction accuracy when the reference-projection-based correction method is used to process the chips. Figure 1a shows the scanning process of the chip. Here, we highlight partial projections with missing attenuation coefficients. This happens when the chip plane is parallel to the X-ray (or in the nearby angular range). Existing projection alignment methods may degrade or even fail because the textures of projections are missing. Therefore, it is necessary to manually determine the failure interval and interpolate the estimated drift directly at the endpoints to reduce errors.
- (3)
- When the noise increases, the correction accuracy of the correction framework based on reference projections can decrease. In some scanning tasks, it is often necessary to reduce the voltage or decrease the exposure time, which can lead to additional noise in the projections. However, the increase in noise can reduce the projection alignment accuracy and cause the drift artifacts correction to fail.
2.2. Multiscale Network
3. Method
3.1. Network Architecture
3.2. Loss Function
4. Experiment
4.1. Dataset and Implementation Details
- (1)
- Cropping, 0–2% of the edge is cropped with a probability of 0.5.
- (2)
- Scaling, the scaling ratio is 99–101%.
- (3)
- Translation and rotation, the translation range is from −1 pixel to 1 pixel, and the rotation range is from −5° to 5°.
4.2. Experiments Setting
5. Results and Discussion
5.1. Evaluation of Drift Artifacts Correction on Chips
5.2. Network Performance Comparison and Ablation Experiments
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kampschulte, M.; Langheinirch, A.C.; Sender, J.; Litzlbauer, H.D.; Althöhn, U.; Schwab, J.D.; Alejandre-Lafont, E.; Martels, G.; Krombach, G.A. Nano-Computed Tomography: Technique and Applications. RoFo Fortschritte Gebiete Rontgenstrahlen Nuklearmedizin 2016, 188, 146–154. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Langheinrich, A.C.; Yeniguen, M.; Ostendorf, A.; Marhoffer, S.; Kampschulte, M.; Bachmann, G.; Stolz, E.; Gerriets, T. Evaluation of the middle cerebral artery occlusion techniques in the rat by in-vitro 3-dimensional micro- and nano computed tomography. BMC Neurol. 2010, 10, 36. [Google Scholar] [CrossRef] [Green Version]
- Su, Z.; Decencière, E.; Nguyen, T.T.; El-Amiry, K.; Andrade, V.D.; Franco, A.A.; Demortière, A. Artificial neural network approach for multiphase segmentation of battery electrode nano-CT images. NPJ Comput. Math. 2022, 8, 1–11. [Google Scholar] [CrossRef]
- Tjaden, B.; Lane, J.; Brett, D.; Shearing, P.R. Understanding transport phenomena in electrochemical energy devices via X-ray nano CT. J. Phys. Conf. Ser. 2017, 849, 012018. [Google Scholar] [CrossRef] [Green Version]
- Vavrik, D.; Jandejsek, I.; Pichotka, M. Correction of the X-ray tube spot movement as a tool for improvement of the micro-tomography quality. J. Instrum. 2016, 11, C01029. [Google Scholar] [CrossRef]
- Borges de Oliveira, F.; Porath, M.; Camargo Nardelli, V.; Arenhart, F.; Donatelli, G. Characterization and Correction of Geometric Errors Induced by Thermal Drift in CT Measurements. Key Eng. Mater. 2014, 613, 327–334. [Google Scholar] [CrossRef]
- Guizar-Sicairos, M.; Diaz, A.; Holler, M.; Lucas, M.S.; Menzel, A.; Wepf, R.A.; Bunk, O. Phase tomography from x-ray coherent diffractive imaging projections. Opt. Express 2011, 19, 21345–21357. [Google Scholar] [CrossRef] [Green Version]
- Odstrčil, M.; Holler, M.; Raabe, J.; Guizar-Sicairos, M. Alignment methods for nanotomography with deep subpixel accuracy. Opt. Express 2019, 27, 36637–36652. [Google Scholar] [CrossRef] [Green Version]
- Sasov, A.; Liu, X.; Salmon, P. Compensation of mechanical inaccuracies in micro-CT and nano-CT. Proc SPIE 2008, 7078, 70781C. [Google Scholar] [CrossRef]
- Salmon, P.; Liu, X.; Sasov, A. A post-scan method for correcting artefacts of slow geometry changes during micro-tomographic scans. J. X-Ray Sci. Technol. 2009, 17, 161–174. [Google Scholar] [CrossRef]
- Hiller, J.; Maisl, M.; Reindl, L. Physical characterization and performance evaluation of an x-ray micro-computed tomography system for dimensional metrology applications. Meas. Sci. Technol. 2012, 23, 085404. [Google Scholar] [CrossRef]
- Vogeler, F.; Verheecke, W.; Voet, A.; Kruth, J.P.; Dewulf, W. Positional Stability of 2D X-ray Images for Computer Tomography. In Proceedings of the International Symposium on Digital Industrial Radiology and Computed Tomography (DIR 2011), Berlin, Germany, 20–22 June 2011. [Google Scholar]
- Liu, M.; Han, Y.; Xi, X.; Tan, S.; Chen, J.; Li, L.; Yan, B. Thermal Drift Correction for Laboratory Nano Computed Tomography via Outlier Elimination and Feature Point Adjustment. Sensors 2021, 21, 8493. [Google Scholar] [CrossRef] [PubMed]
- Gürsoy, D.; Hong, Y.P.; He, K.; Hujsak, K.; Yoo, S.; Chen, S.; Li, Y.; Ge, M.; Miller, L.M.; Chu, Y.S.; et al. Rapid alignment of nanotomography data using joint iterative reconstruction and reprojection. Sci. Rep. 2017, 7, 11818. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Larsson, E.; Gürsoy, D.; De Carlo, F.; Lilleodden, E.; Storm, M.; Wilde, F.; Hu, K.; Müller, M.; Greving, I. Nanoporous gold: A hierarchical and multiscale 3D test pattern for characterizing X-ray nano-tomography systems. J. Synchrotron Radiat. 2019, 26, 194–204. [Google Scholar] [CrossRef] [Green Version]
- Fu, T.; Zhang, K.; Wang, Y.; Li, J.; Zhang, J.; Yao, C.; He, Q.; Wang, S.; Huang, W.; Yuan, Q.; et al. Deep-learning-based image registration for nano-resolution tomographic reconstruction. J. Synchrotron Radiat. 2021, 28, 1909–1915. [Google Scholar] [CrossRef]
- Liu, M.; Han, Y.; Xi, X.; Zhu, M.; Zhu, L.; Song, X.; Kang, G.; Yang, S.; Li, L.; Yan, B. Horizontal Drift Correction by Trajectory of Sinogram Centroid Fitting for Laboratory X-ray Nanotomography; ICOIP: Guilin, China, 2021; Volume 11915. [Google Scholar]
- Nikitin, V.; Andrade, V.D.; Slyamov, A.; Gould, B.J.; Zhang, Y.; Sampathkumar, V.; Kasthuri, N.; Gürsoy, D.; Carlo, F.D. Distributed Optimization for Nonrigid Nano-Tomography. IEEE Trans. Comput. Imaging 2021, 7, 272–287. [Google Scholar] [CrossRef]
- Cho, S.J.; Ji, S.W.; Hong, J.P.; Jung, S.W.; Ko, S.J. Rethinking Coarse-to-Fine Approach in Single Image Deblurring. arXiv 2021, arXiv:2108.05054. [Google Scholar]
- Nah, S.; Kim, T.H.; Lee, K.M. Deep Multi-Scale Convolutional Neural Network for Dynamic Scene Deblurring; Computer Society: Washington, DC, USA, 2016. [Google Scholar]
- Feldkamp, L.A.; Davis, L.C.; Kress, J.W. Practical cone-beam algorithm. J. Opt. Soc. Am. A 1984, 1, 612–619. [Google Scholar] [CrossRef] [Green Version]
- Wei, J.; Zhu, G.; Fan, Z.; Liu, J.; Rong, Y.; Mo, J.; Li, W.; Chen, X. Genetic U-Net: Automatically Designed Deep Networks for Retinal Vessel Segmentation Using a Genetic Algorithm. IEEE Trans. Med. Imaging 2022, 41, 292–307. [Google Scholar] [CrossRef]
- Ackermann, T.F. digital image correlation: Performance and potential application in photogrammetry. Photogramm. Rec. 2006, 11, 429–439. [Google Scholar] [CrossRef]
- Georgios, D.; Evangelidis; Emmanouil, Z.; Psarakis. Parametric image alignment using enhanced correlation coefficient maximization. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 31, 1858–1865. [Google Scholar]
- Manuel Guizar-Sicairos, S.T.T.; Fienup, J.R. Efficient subpixel image registration algorithms. Opt. Lett. 2008, 33, 156. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bay, H.; Ess, A.; Tuytelaars, T.; Gool, L.V. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Ma, J.; Zhao, J.; Jiang, J.; Zhou, H.; Guo, X. Locality Preserving Matching. Int. J. Comput. Vis. 2019, 127, 512–531. [Google Scholar] [CrossRef]
- Torr, P.; Zisserman, A. MLESAC: A New Robust Estimator with Application to Estimating Image Geometry. Comput. Vis. Image Underst. 2000, 78, 138–156. [Google Scholar] [CrossRef] [Green Version]
- Tao, X.; Gao, H.; Wang, Y.; Shen, X.; Wang, J.; Jia, J. Scale-recurrent Network for Deep Image Deblurring. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Kupyn, O.; Martyniuk, T.; Wu, J.; Wang, Z. DeblurGAN-v2: Deblurring (Orders-of-Magnitude) Faster and Better. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Wu, H.; Ni, N.; Zhang, L. Scale-Aware Dynamic Network for Continuous-Scale Super-Resolution. arXiv 2021, arXiv:2110.15655. [Google Scholar]
- Li, J.; Fang, F.; Mei, K.; Zhang, G. Multi-scale Residual Network for Image Super-Resolution. In Proceedings of the ECCV, Munich, Germany, 8–12 September 2018; pp. 517–532. [Google Scholar]
- Cao, J.; Li, Y.; Sun, M.; Chen, Y.; Lischinski, D.; Cohen-Or, D.; Chen, B.; Tu, C. DO-Conv: Depthwise Over-parameterized Convolutional Layer. IEEE Trans. Image Processing 2020, 31, 3726–3736. [Google Scholar] [CrossRef]
- Zhang, Y.; Tian, Y.; Kong, Y.; Zhong, B.; Fu, Y. Residual Dense Network for Image Super-Resolution. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Zhang, Y.; Li, K.; Li, K.; Wang, L.; Zhong, B.; Fu, Y. Image Super-Resolution Using Very Deep Residual Channel Attention Networks. In Proceedings of the ECCV, Munich, Germany, 8–12 September 2018; pp. 286–301. [Google Scholar]
- Lim, B.; Son, S.; Kim, H.; Nah, S.; Lee, K.M. Enhanced Deep Residual Networks for Single Image Super-Resolution. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Wang, X.; Yu, K.; Wu, S.; Gu, J.; Liu, Y.; Dong, C.; Loy, C.C.; Qiao, Y.; Tang, X. ESRGAN: Enhanced Super-Resolution Generative Adversarial Networks; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Mao, X.; Liu, Y.; Shen, W.; Li, Q.; Wang, Y. Deep Residual Fourier Transformation for Single Image Deblurring. arXiv 2021, arXiv:2111.11745. [Google Scholar]
- Xin, J.; Liang, L.; Le, S.; Chen, Z. Improved total variation based CT reconstruction algorithm with noise estimation. In Spie Optical Engineering + Applications; SPIE: Bellingham, DC, USA, 2012. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Type | Chip Number | Scan Parameters | |||||
|---|---|---|---|---|---|---|---|
| Voltage (kV) | Detector Size (Pixels) | Exposure Time (s) | Rotation Step of Round 1 (°) | Rotation Step of Round 2 (°) | |||
| Simulation Verification | Chip 1 | 60 | 1065 × 1030 | 5 | 3 | ||
| Actual Correction | Chip 2 | 15 | 0.36 | 3.6 | |||
| Chip 3 | 15 | 3 | |||||
| Model | PSNR | SSIM | Runtime (s) | Params (M) |
|---|---|---|---|---|
| DeblurGAN-v2 | 24.946 | 0.856 | 0.137 | 11.70 |
| MIMO-Unet | 31.775 | 0.970 | 0.075 | 6.81 |
| MD-Unet-small | 31.891 | 0.970 | 0.045 | 4.11 |
| MD-Unet | 32.155 | 0.972 | 0.097 | 10.55 |
| MD-Unet+ | 32.691 | 0.974 | 0.109 | 16.98 |
| Block | Name | PSNR | SSIM | Param (M) |
|---|---|---|---|---|
| Encoder/Decoder | Res Dense Block (no Do-Conv) | 31.835 | 0.970 | 8.88 |
| ResBlock | 31.640 | 0.970 | 7.10 | |
| Activation function | Relu | 31.885 | 0.972 | 10.55 |
| Feature attention | Element sum | 31.820 | 0.970 | 10.55 |
| Element multiplication | 31.582 | 0.969 | 10.55 | |
| FAM | 31.925 | 0.972 | 10.55 | |
| Multi-scale feature fusion | AFF | 32.057 | 0.971 | 10.63 |
| Without | 31.958 | 0.971 | 7.07 | |
| Loss | MSC | 31.674 | 0.968 | 10.55 |
| MSC+MSRF | 31.917 | 0.970 | 10.55 | |
| MSC+MFE | 31.695 | 0.968 | 10.55 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Han, Y.; Xi, X.; Zhu, L.; Yang, S.; Tan, S.; Chen, J.; Li, L.; Yan, B. Multiscale Dense U-Net: A Fast Correction Method for Thermal Drift Artifacts in Laboratory NanoCT Scans of Semi-Conductor Chips. Entropy 2022, 24, 967. https://doi.org/10.3390/e24070967
Liu M, Han Y, Xi X, Zhu L, Yang S, Tan S, Chen J, Li L, Yan B. Multiscale Dense U-Net: A Fast Correction Method for Thermal Drift Artifacts in Laboratory NanoCT Scans of Semi-Conductor Chips. Entropy. 2022; 24(7):967. https://doi.org/10.3390/e24070967
Chicago/Turabian StyleLiu, Mengnan, Yu Han, Xiaoqi Xi, Linlin Zhu, Shuangzhan Yang, Siyu Tan, Jian Chen, Lei Li, and Bin Yan. 2022. "Multiscale Dense U-Net: A Fast Correction Method for Thermal Drift Artifacts in Laboratory NanoCT Scans of Semi-Conductor Chips" Entropy 24, no. 7: 967. https://doi.org/10.3390/e24070967