
Joint Optimization of Control Strategy and Energy Consumption for Energy Harvesting WSAN



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
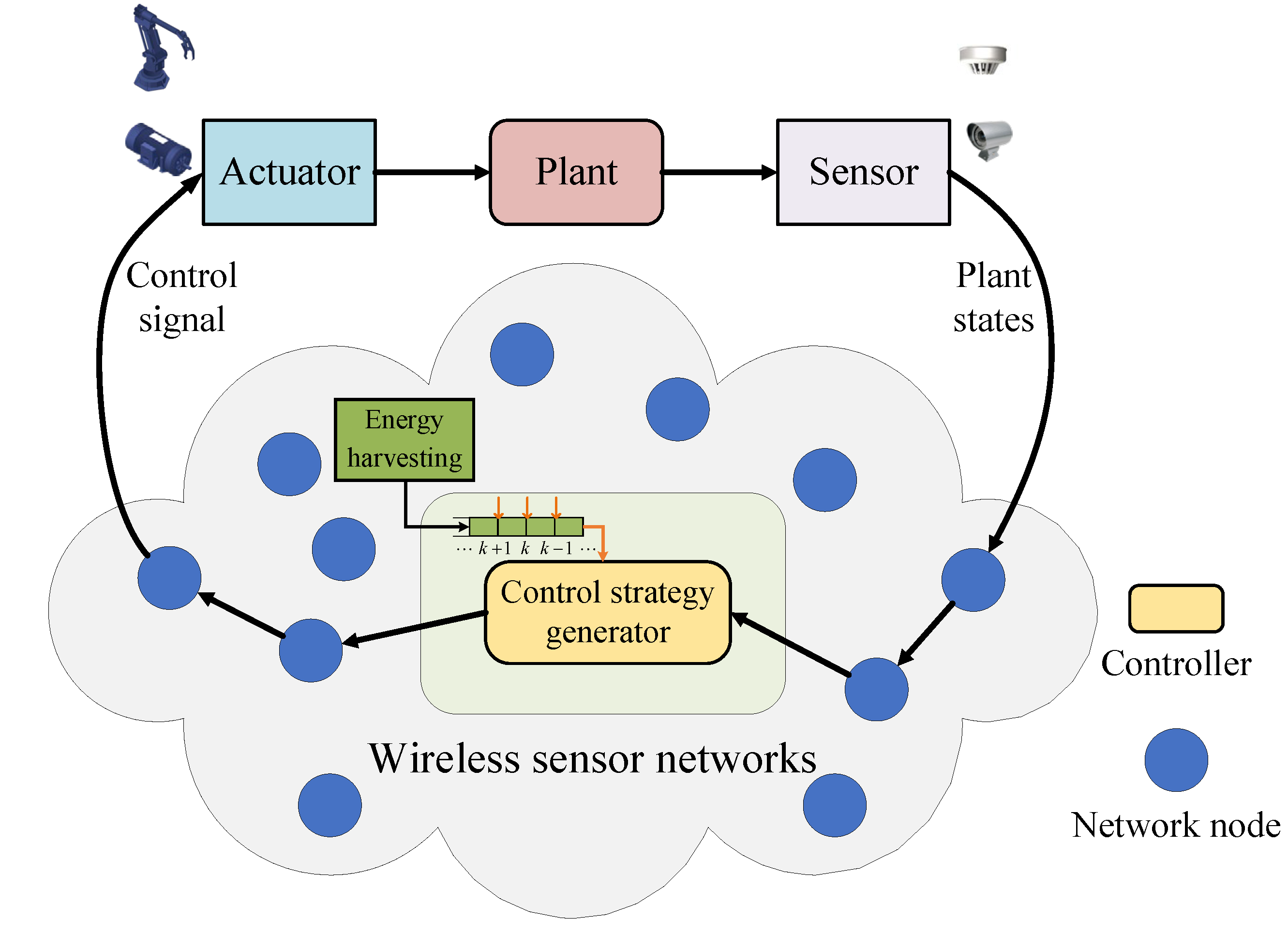
- In discrete-time domain, the architecture of the WASN system with an energy harvesting controller considering both energy consumption and control strategy design is proposed, and then the WSAN dynamics with network-induced delay is modeled. Based on the analysis of energy harvesting and consumption, the joint optimization problem for energy harvesting WSAN is formulated;
- The joint optimization problem is successfully decomposed into two suboptimal problems. In particular, it can be transformed to be an optimal control strategy design problem for a given sampling interval, while it can be equivalent to an adaptive sampling interval design problem when the control strategy is determined;
- A novel three-step joint optimization algorithm is proposed. First, the optimal sampling interval can be obtained based on the desired energy level, harvested, and remaining energy. Then, the control gain can be derived by using a backward iteration. Finally, the optimal control strategy is determined;
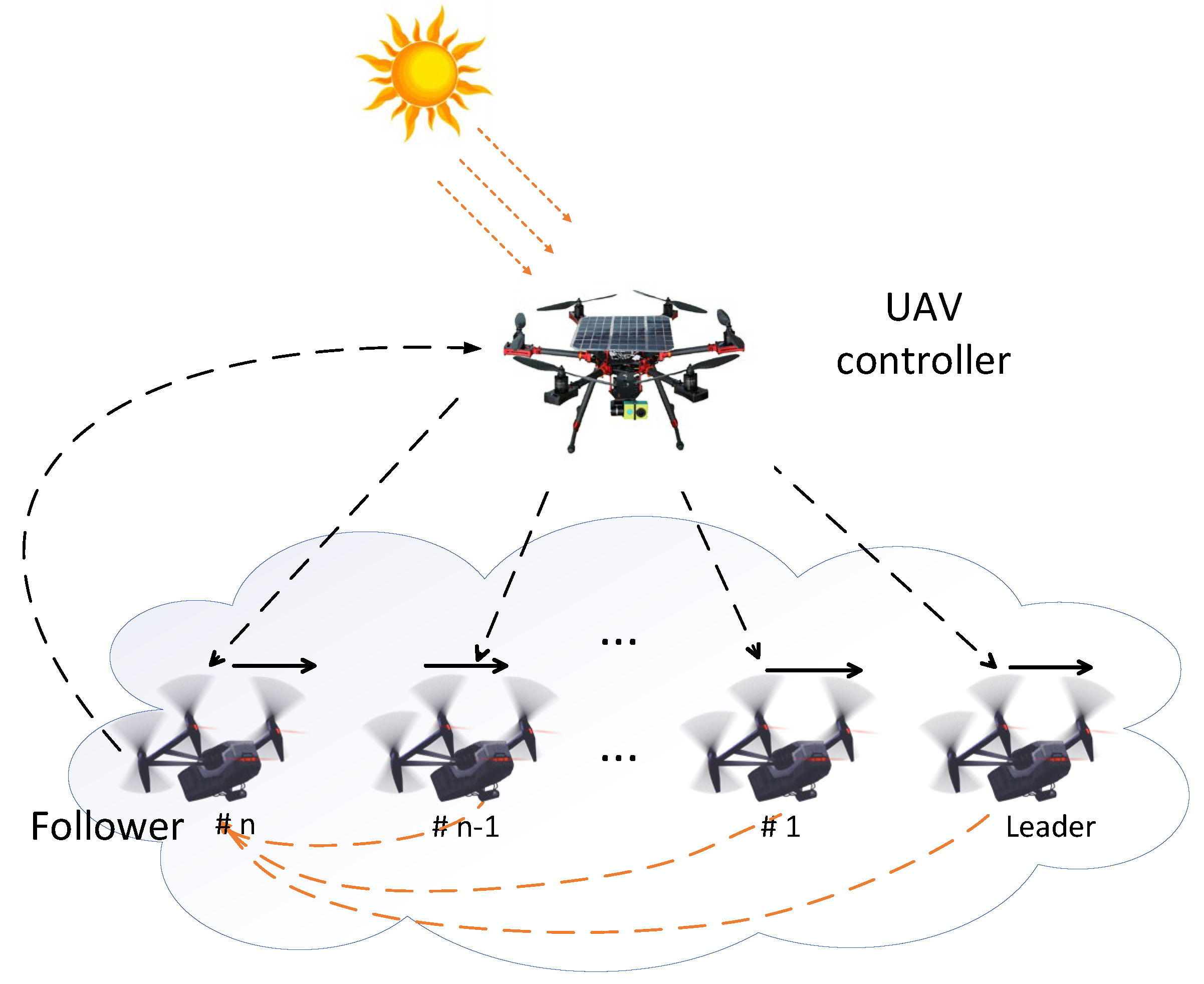
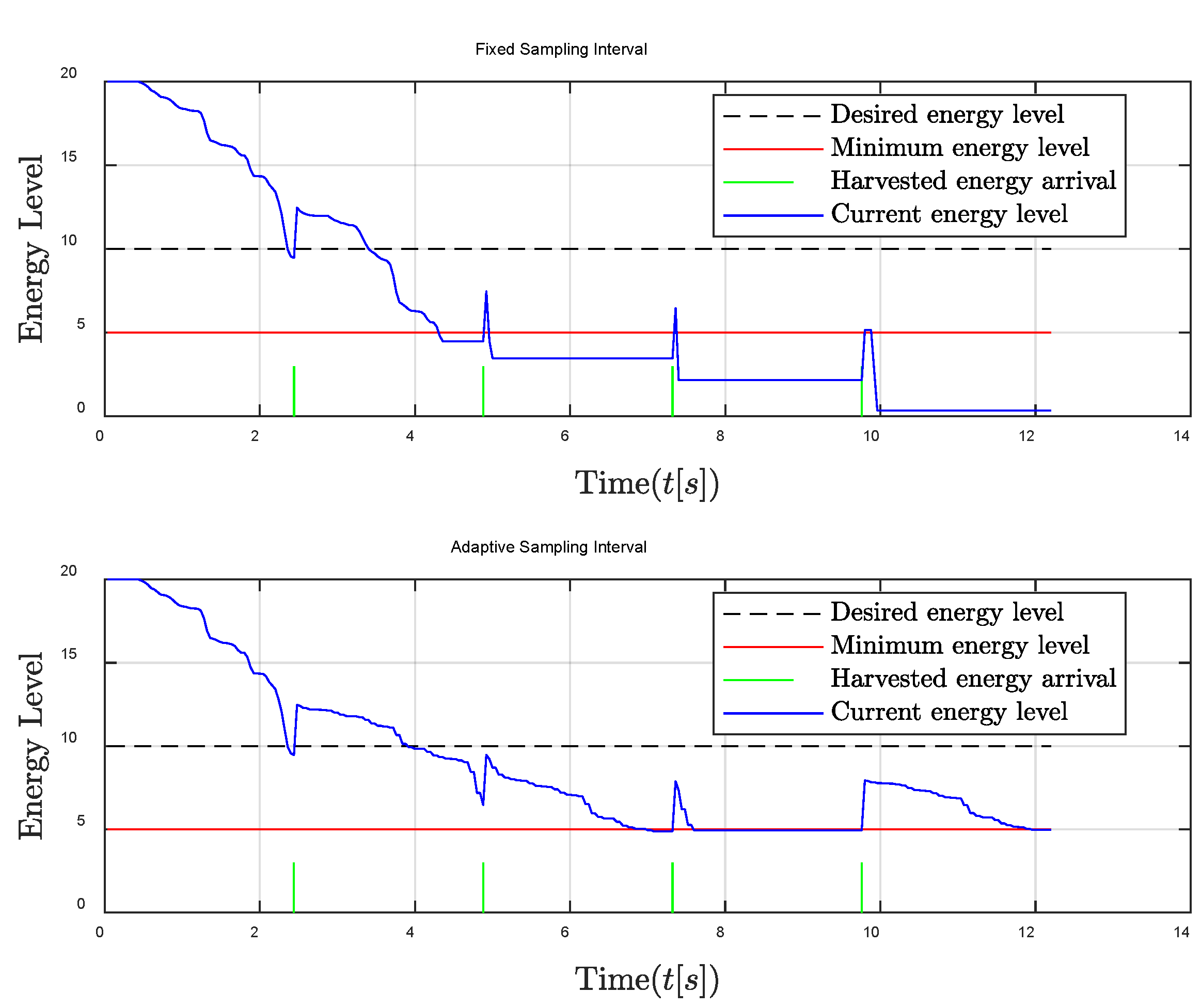
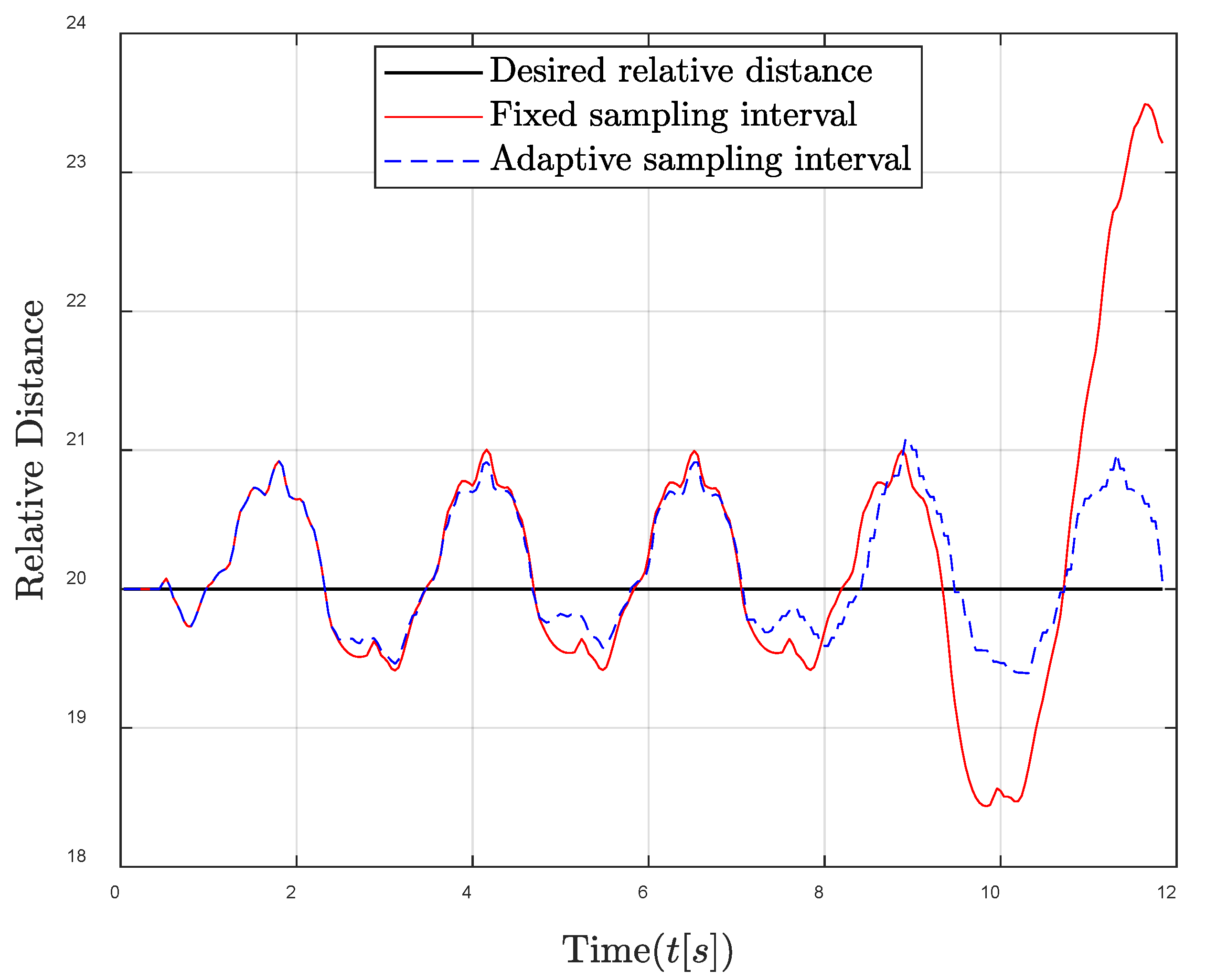
- Numerical experiment results based on the UAV formation flight system are provided to verify the effectiveness of the proposed three-step optimization algorithm for energy harvesting WSANs. The system performances with better control stability and lower energy consumption are achieved.
2. Related Works
2.1. WSAN Control and Adaptive Sampling
2.2. Energy Optimization for Energy Harvesting WSAN
3. Energy Harvesting WSAN Modeling
3.1. WSAN Dynamics Model
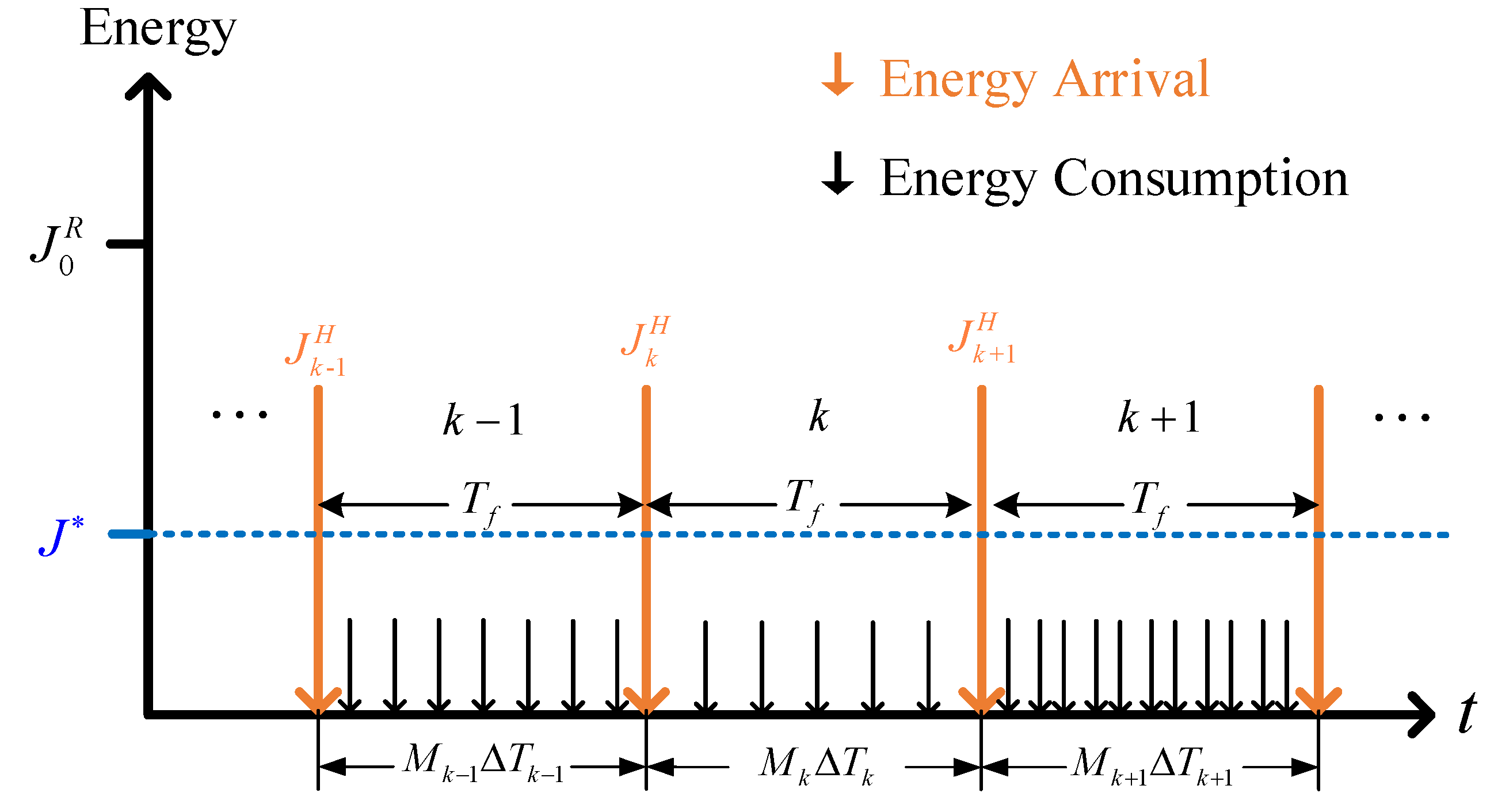
3.2. Energy Harvesting and Consumption
4. Joint Optimization Algorithm Design
4.1. Joint Optimization Problem
4.2. Control Strategy Design
4.3. Adaptive Sampling Interval Design
| Algorithm 1 Three-Step Algorithm |
| 1 Step 1: Off-line |
| 2 Set System paramters μ, λ, d, r and . |
| 3 Update initializations and |
| 4 Calculate the optimal sampling interval |
| 5 Step 2: Off-line |
| 6 Initialize |
| 7 for do |
| 8 Calculate . |
| 9 Calculate . |
| 10 end |
| 11 Step 3: On-line |
| 12 Initialize . |
| 13 for do |
| 14 Update plant states . |
| 15 Set . |
| 16 Calculate the optimal control . |
| 17 end |
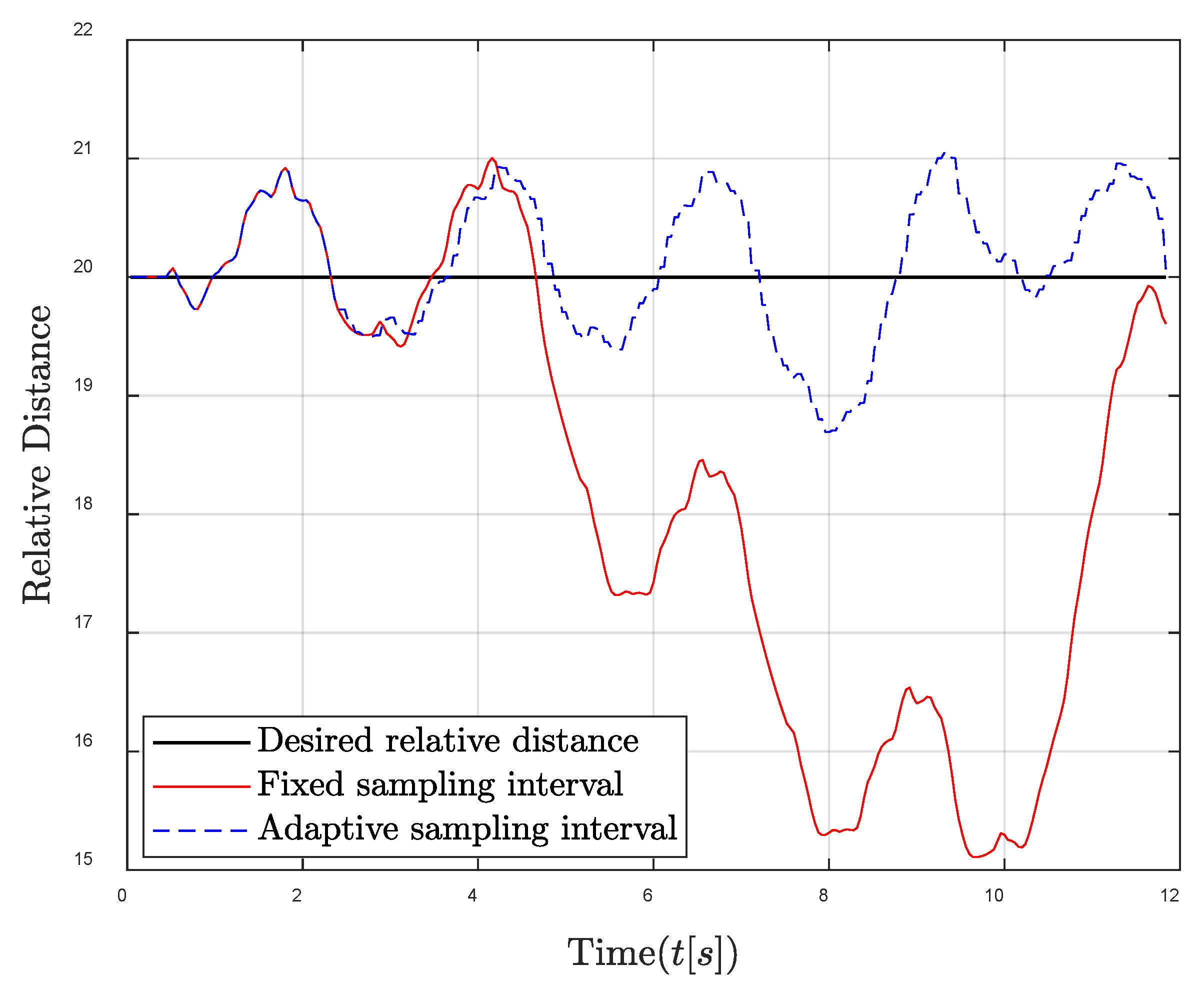
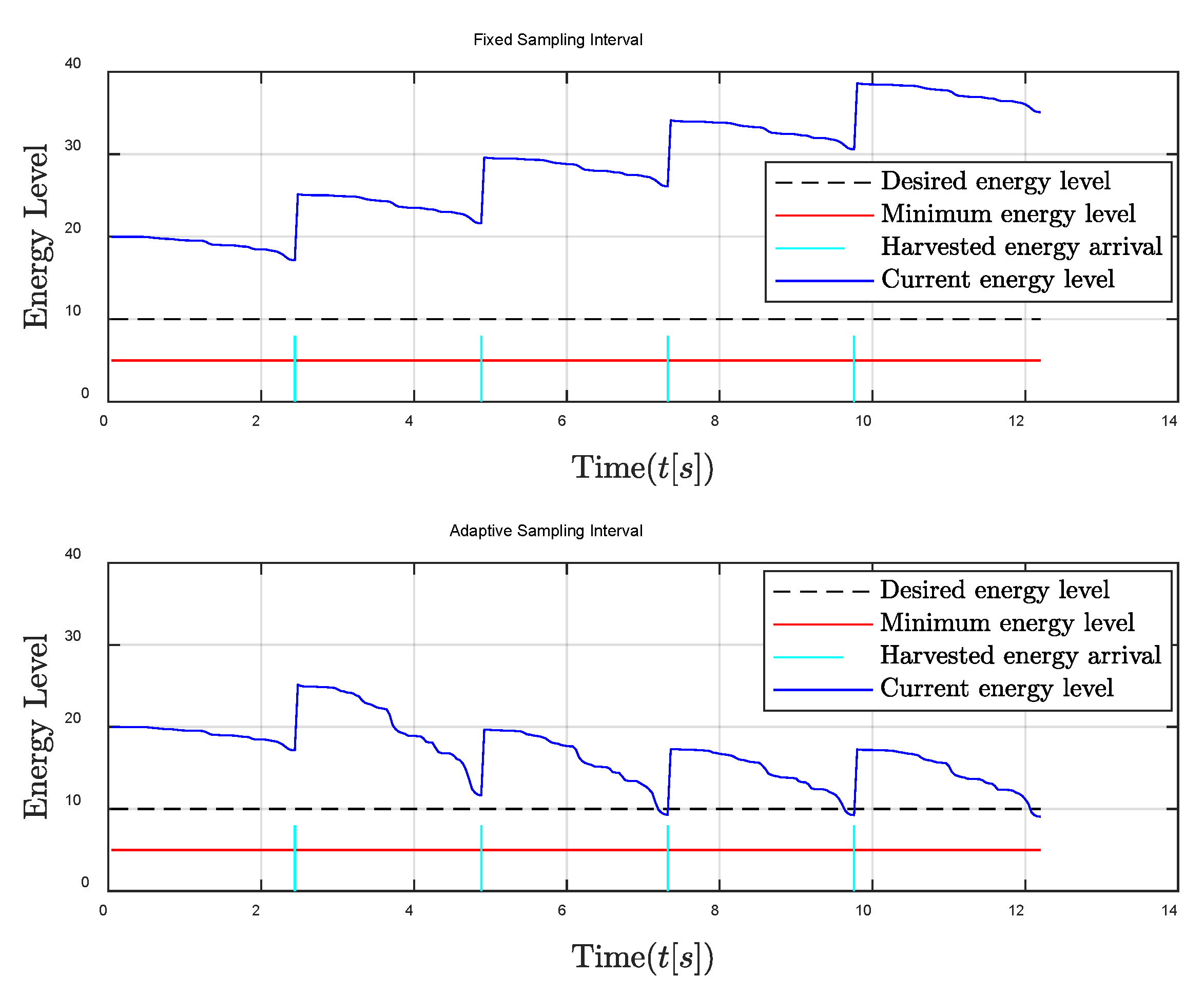
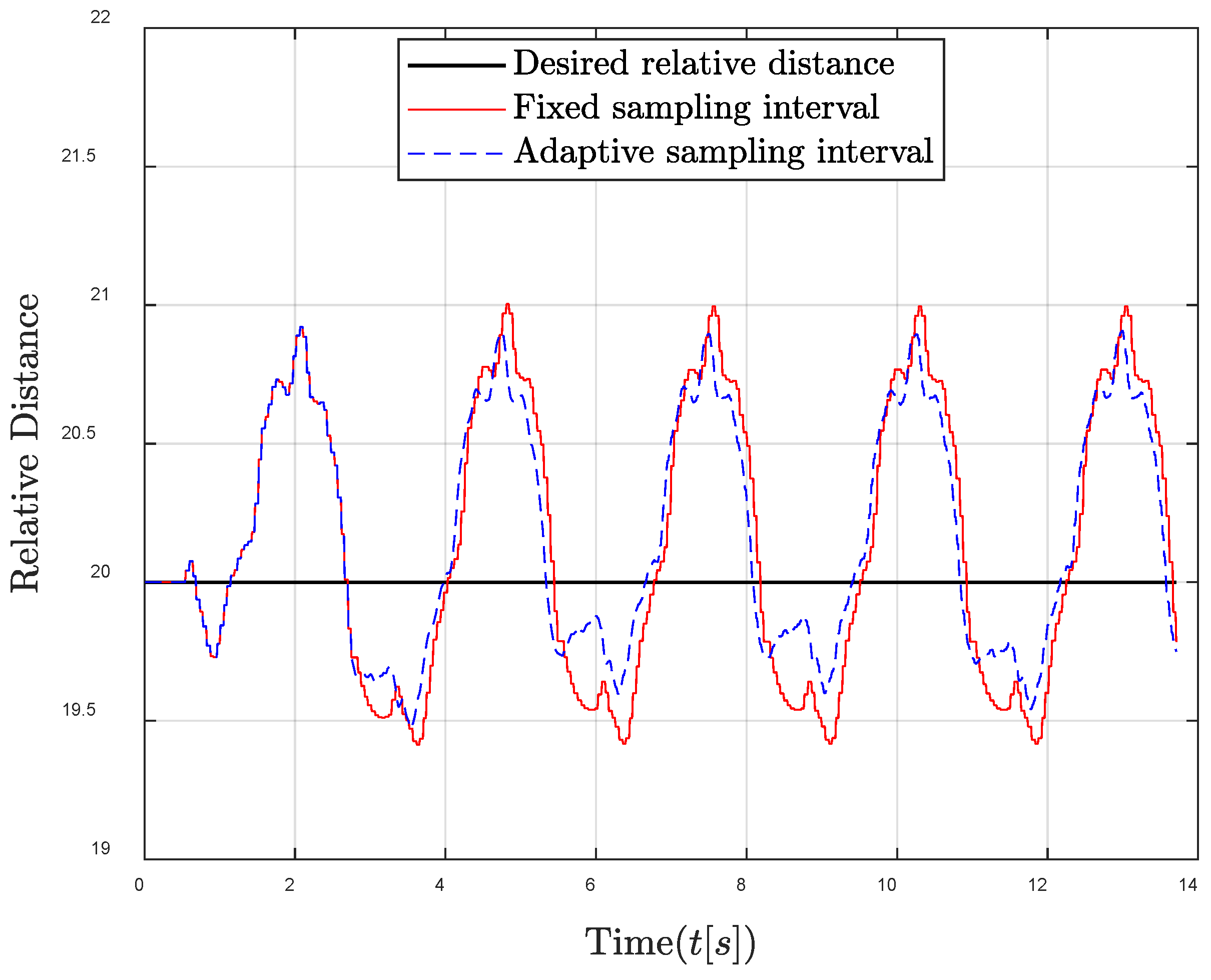
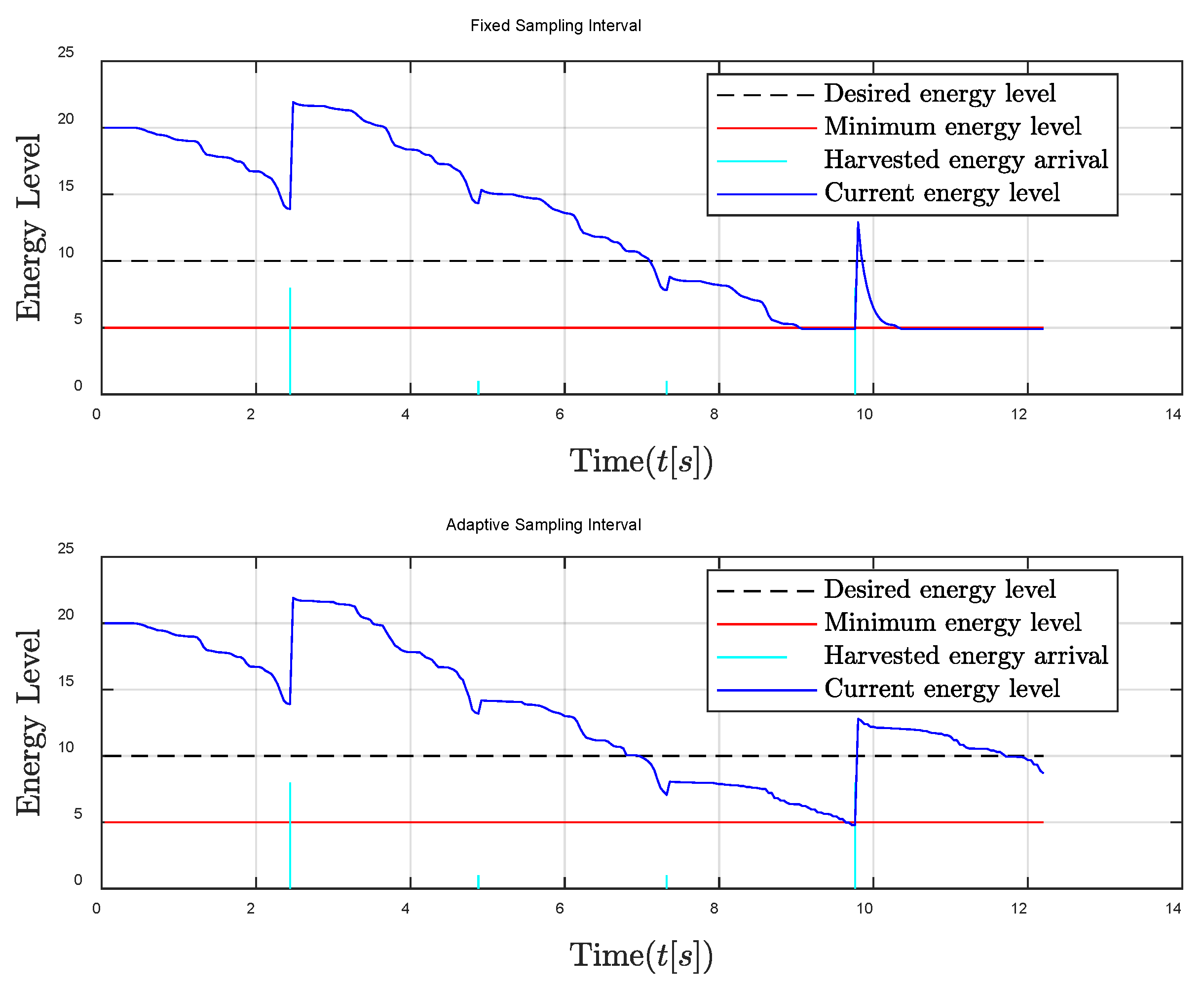
5. Simulations and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Primeau, N.; Falcon, R.; Abielmona, R.; Petriu, E.M. A review of computational intelligence techniques in wireless sensor and actuator networks. IEEE Commun. Surv. Tutor. 2018, 20, 2822–2854. [Google Scholar] [CrossRef]
- Da Xu, L.; He, W.; Li, S. Internet of things in industries: A survey. IEEE Trans. Ind. Inform. 2014, 10, 2233–2243. [Google Scholar]
- Walravens, N.; Ballon, P. Platform business models for smart cities: From control and value to governance and public value. IEEE Commun. Mag. 2013, 51, 72–79. [Google Scholar] [CrossRef]
- Åkerberg, J.; Gidlund, M.; Björkman, M. Future research challenges in wireless sensor and actuator networks targeting industrial automation. In Proceedings of the 2011 9th IEEE International Conference on Industrial Informatics, Lisbon, Portugal, 26–29 July 2011; pp. 410–415. [Google Scholar]
- Xia, F. QoS challenges and opportunities in wireless sensor/actuator networks. Sensors 2008, 8, 1099–1110. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Akyildiz, I.F.; Kasimoglu, I.H. Wireless sensor and actor networks: Research challenges. Ad Hoc Netw. 2004, 2, 351–367. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, H.; Kaynak, O. Network-induced constraints in networked control systems—A survey. IEEE Trans. Ind. Inform. 2012, 9, 403–416. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L.; Seuret, A.; Gouaisbaut, F.; He, Y. Overview of recent advances in stability of linear systems with time-varying delays. IET Control Theory Appl. 2019, 13, 1–16. [Google Scholar] [CrossRef]
- Liu, H.; Chandra, A.; Srivastava, J. eSENSE: Energy efficient stochastic sensing framework for wireless sensor platforms. In Proceedings of the 2006 5th International Conference on Information Processing in Sensor Networks, Nashville, TN, USA, 31 July 2006; pp. 235–242. [Google Scholar]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Ulukus, S.; Yener, A.; Erkip, E.; Simeone, O.; Zorzi, M.; Grover, P.; Huang, K. Energy harvesting wireless communications: A review of recent advances. IEEE J. Sel. Areas Commun. 2015, 33, 360–381. [Google Scholar] [CrossRef] [Green Version]
- Tan, Q.; An, W.; Han, Y.; Liu, Y.; Ci, S.; Shao, F.M.; Tang, H. Energy harvesting aware topology control with power adaptation in wireless sensor networks. Ad Hoc Netw. 2015, 27, 44–56. [Google Scholar] [CrossRef]
- Ge, X.; Yang, F.; Han, Q.L. Distributed networked control systems: A brief overview. Inf. Sci. 2017, 380, 117–131. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, Z.; Liu, L.; Fang, C.; Li, M.; Sun, E. Joint optimization design for wireless sensor and actuator networks with energy harvesting. In Proceedings of the 2021 7th International Conference on Computer and Communications (ICCC), Chengdu, China, 10–13 December 2021; pp. 272–276. [Google Scholar]
- Gaid, M.M.B.; Cela, A.; Hamam, Y. Optimal integrated control and scheduling of networked control systems with communication constraints: Application to a car suspension system. IEEE Trans. Control Syst. Technol. 2006, 14, 776–787. [Google Scholar] [CrossRef] [Green Version]
- Nilsson, J.; Bernhardsson, B.; Wittenmark, B. Stochastic analysis and control of real-time systems with random time delays. Automatica 1998, 34, 57–64. [Google Scholar] [CrossRef]
- Shousong, H.; Qixin, Z. Stochastic optimal control and analysis of stability of networked control systems with long delay. Automatica 2003, 39, 1877–1884. [Google Scholar] [CrossRef]
- Iwaki, T.; Johansson, K.H. LQG control and scheduling co-design for wireless sensor and actuator networks. In Proceedings of the 2018 IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications, Kalamata, Greece, 27 August 2018; pp. 1–5. [Google Scholar]
- Wang, Z.; Guo, Y.; Sun, Y.; Fang, C.; Wu, W. Joint optimization of control and resource management for wireless sensor and actuator networks. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Korea, 19 June 2020; pp. 1–6. [Google Scholar]
- Alsharif, M.H.; Kim, S.; Kuruoğlu, N. Energy harvesting techniques for wireless sensor networks/radio-frequency identification: A review. Symmetry 2019, 11, 865. [Google Scholar] [CrossRef] [Green Version]
- Giouroukis, D.; Dadiani, A.; Traub, J.; Zeuch, S.; Markl, V. A survey of adaptive sampling and filtering algorithms for the internet of things. In Proceedings of the 14th ACM International Conference on Distributed and Event-Based Systems, Montreal, QC, Canada, 13–17 July 2020; pp. 27–38. [Google Scholar]
- Kanoun, O.; Bradai, S.; Khriji, S.; Bouattour, G.; El Houssaini, D.; Ben Ammar, M.; Viehweger, C. Energy-aware system design for autonomous wireless sensor nodes: A comprehensive review. Sensors 2021, 21, 548. [Google Scholar] [CrossRef]
- Alippi, C.; Anastasi, G.; Di Francesco, M.; Roveri, M. An adaptive sampling algorithm for effective energy management in wireless sensor networks with energy-hungry sensors. IEEE Trans. Instrum. Meas. 2009, 59, 335–344. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.; Lee, J. Harvesting and energy aware adaptive sampling algorithm for guaranteeing self-sustainability in wireless sensor networks. In Proceedings of the 2017 International Conference on Information Networking (ICOIN), Da Nang, Vietnamese, 17 April 2017; pp. 57–62. [Google Scholar]
- Srbinovski, B.; Magno, M.; Edwards-Murphy, F.; Pakrashi, V.; Popovici, E. An energy aware adaptive sampling algorithm for energy harvesting WSN with energy hungry sensors. Sensors 2016, 16, 448. [Google Scholar] [CrossRef] [Green Version]
- Nkwogu, D.N.; Allen, A.R. Adaptive sampling for WSAN control applications using artificial neural networks. J. Sens. Actuator Netw. 2012, 1, 299–320. [Google Scholar] [CrossRef] [Green Version]
- Tian, Z.; Ren, Y.; Wang, G. A variable sampling period scheduling method for networked control system under resource constraints. Aust. J. Electr. Electron. Eng. 2019, 16, 289–304. [Google Scholar] [CrossRef]
- Ma, D.; Lan, G.; Hassan, M.; Hu, W.; Das, S.K. Sensing, computing, and communications for energy harvesting IoTs: A survey. IEEE Commun. Surv. Tutor. 2019, 22, 1222–1250. [Google Scholar] [CrossRef]
- Adu-Manu, K.S.; Adam, N.; Tapparello, C.; Ayatollahi, H.; Heinzelman, W. Energy-harvesting wireless sensor networks (EH-WSNs) A review. ACM Trans. Sens. Netw. (TOSN) 2018, 14, 1–50. [Google Scholar] [CrossRef]
- Shaikh, F.K.; Zeadally, S. Energy harvesting in wireless sensor networks: A comprehensive review. Renew. Sustain. Energy Rev. 2016, 55, 1041–1054. [Google Scholar] [CrossRef]
- Singh, J.; Kaur, R.; Singh, D. Energy harvesting in wireless sensor networks: A taxonomic survey. Int. J. Energy Res. 2021, 45, 118–140. [Google Scholar] [CrossRef]
- Vigorito, C.M.; Ganesan, D.; Barto, A.G. Adaptive control of duty cycling in energy-harvesting wireless sensor networks. In Proceedings of the 2007 4th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks, San Diego, CA, USA, 20 August 2007; pp. 21–30. [Google Scholar]
- Watkins, N.J.; Gatsis, K.; Nowzari, C.; Pappas, G.J. Battery management for control systems with energy harvesting sensors. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, VIC, Australia, 23 January 2018; pp. 4538–4543. [Google Scholar]
- Knorn, S.; Dey, S. Optimal sensor transmission energy allocation for linear control over a packet dropping link with energy harvesting. In Proceedings of the 2015 54th IEEE Conference on Decision and Control (CDC), Osaka, Japan, 11 February 2016; pp. 1199–1204. [Google Scholar]
- Knorn, S.; Dey, S. Optimal energy allocation for linear control with packet loss under energy harvesting constraints. Automatica 2017, 77, 259–267. [Google Scholar] [CrossRef] [Green Version]
- Cai, S.; Lau, V.K. MIMO precoding for networked control systems with energy harvesting sensors. IEEE Trans. Signal Process. 2016, 64, 4469–4478. [Google Scholar] [CrossRef] [Green Version]
- Watkins, N.J.; Gatsis, K.; Morari, M.; Pappas, G.J. Scenario-based model predictive control for energy harvesting actuators. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 16 August 2018; pp. 5497–5502. [Google Scholar]
- Dong, Y.; Wang, J.; Shim, B.; Kim, D.I. DEARER: A distance-and-energy-aware routing with energy reservation for energy harvesting wireless sensor networks. IEEE J. Sel. Areas Commun. 2016, 34, 3798–3813. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Liu, Z.; Liu, L.; Fang, C.; Li, M.; Zhao, J. Joint Optimization of Control Strategy and Energy Consumption for Energy Harvesting WSAN. Entropy 2022, 24, 723. https://doi.org/10.3390/e24050723
Wang Z, Liu Z, Liu L, Fang C, Li M, Zhao J. Joint Optimization of Control Strategy and Energy Consumption for Energy Harvesting WSAN. Entropy. 2022; 24(5):723. https://doi.org/10.3390/e24050723
Chicago/Turabian StyleWang, Zhuwei, Zhicheng Liu, Lihan Liu, Chao Fang, Meng Li, and Jingcheng Zhao. 2022. "Joint Optimization of Control Strategy and Energy Consumption for Energy Harvesting WSAN" Entropy 24, no. 5: 723. https://doi.org/10.3390/e24050723