1. Introduction
Many meta-heuristic algorithms have been proposed and successfully used for solving numerical optimization problems [
1], engineering design problems [
2], future selection [
3], etc. For the swarm intelligence algorithm, the classical method is particle swarm optimization (PSO) algorithm [
4], which is widely used in various fields [
5]. There are many novel approaches proposed in recent years, which are inspired by the group behavior of the animals in nature, such as ants, bees, fireflies, wolves, and so on. These swarm algorithms are named like ant colony optimization (ACO) [
6], bee colony optimization (BCO) algorithm [
7], firefly algorithm (FA) [
8], grey wolf optimizer (GWO) [
9], etc. Moreover, the classical evolution algorithms, such as genetic algorithm (GA) [
10] and differential evolution (DE) [
11], are well-known in the evolution computation field.
A recent introduction in the swarm intelligence field is butterfly optimization algorithm (BOA) [
12], which imitates the foraging and mating behavior of the butterfly in nature. To improve the global ability of the basic BOA, there are various improved versions of BOA that have been developed, which can be divided into the improvement of control parameters [
13,
14] and hybrid algorithm [
15] from the improved strategies in brief. Additionally, the major applications of BOA and its variants are, including but not limited to, the node localization in wireless sensor networks [
16], optimization of wavelet neural networks [
17], and the feature selection task [
18]. For more details, Zhang et al. [
15] proposed a hybrid algorithm for solving the high-dimensional numerical optimization tasks, named HPSOBOA, which is combined BOA with PSO, and cubic mapping is used to adjust the parameter
a. Moreover, EL-Hasnony et al. [
19] improved this method to solve the feature selection task, which includes a case dataset of COVID-19. In addition, An et al. [
20] used the HPSOBOA method to solve the inverse kinematic problem. However, no available information in the above studies was presented for modifying the BOA’s mathematical model to match the actual foraging behavior of butterflies.
A novel hybrid-flash butterfly optimization algorithm (HFBOA) is proposed for solving the constrained engineering problems, aiming to improve the optimization accuracy of the original BOA. Only the smell perception rule in foraging and mating is considered, which leads to the poor optimal precision of the BOA. Relevant ecological studies [
21] have shown that the vision of butterflies plays a critical role in searching for food (collecting pollen). In the HFBOA, smell and vision are taken into consideration for global and local search, respectively, which makes it more in line with the actual butterfly foraging characteristics. Furthermore, updating the control parameters by logistic mapping is used to enhance the global optimization capability of the HFBOA. According to the no free lunch (NFL) theory [
22], a new optimization algorithm should be used to deal with a certain type of problem.
To verify the performance of the proposed algorithm, 12 benchmark test functions are fairly selected from the CEC benchmark functions in this paper. The performance of the HFBOA was compared with six state-of-the-art meta-heuristic methods. The comparison results show that the proposed algorithm is not only superior to the original BOA but also its variants, such as LBOA [
16], IBOA [
13], MBOA [
14], HPSOBOA [
15], and other meta-heuristic algorithms, which indicates the effectiveness of HFBOA. Furthermore, HFBOA has been successfully used to solve six constrained engineering problems, which are tubular column design, three bar truss design, tension/compression spring design, welded beam design, cantilever beam design, and speed reducer design optimization problems. In general, the main highlights and contributions of the proposed method are summarized as follows: (i) A novel hybrid-flash butterfly optimization algorithm (HFBOA) is proposed. (ii) HFBOA has an overall competitive performance according to the statistical results and convergence curves. (iii) We also used the proposed approach to solve six constrained engineering problems, which are compared with many advanced methods.
The rest of this paper is organized as follows:
Section 2 presents the mathematical model of the original BOA. In
Section 3, a novel hybrid-flash butterfly optimization algorithm is proposed, and chaos improvement strategies and time complexity of HFBOA are also presented.
Section 4 illustrates comparative analysis for solving the numerical optimization and engineering constrained optimization problems, the experimental results are also performed in detail.
Section 5 presents the discussion of the proposed method for solving the numerical and engineering optimization issues. Finally, the conclusions and future studies are summarized in
Section 6.
2. Model of the Basic BOA
The BOA [
12] is based on the foraging and mating behavior of the butterfly in nature. Three phases (fragrance, global search, local search) are presented in the basic BOA. The fragrance is given by:
where
is the perceived magnitude of fragrance,
c represents the sensory modality,
I is the stimulus intensity, and
a represents the power exponent based on the degree of fragrance absorption.
The sensory modality
c in the optimal search phase of the basic BOA is given by:
where
is the maximum number of evolutionary iterations, and the initial value of parameter
c is set to 0.01. According to Equation (
2), the value range of the parameter
c is in (0, 1, 0.3).
A switch parameter
p in (0, 1) is used to choose the pase between global search and local search. The global search movement of the butterfly is given by:
where
denotes the solution vector
of the
ith butterfly in the
t iteration and
r is a random number in [0, 1]. Here,
is the current best solution found among all each stage solutions. The local search phase is given by:
where
and
are the
j-th and
k-th butterflies chosen randomly from the solution space. If
and
belong to the same iteration, it means that the butterfly becomes a local random walk. If not, this kind of random movement will diversify the solution.
3. Hybrid-Flash Butterfly Optimization Algorithm
We have taken the search strategy of the firefly algorithm (FA) [
8] into consideration, and used vision of butterflies for the local optimization in HFBOA. Each stage of HFBOA is presented, including the initialization phase, optimization phase, global search, local search, and switch parameter setting.
3.1. Initialization Phase
The population initialization positions of the butterflies are set by the random function, here, the general formula of the initial position is as follows:
where
is the
i-th solution for the
j-th dimension,
,
.
and
represent the upper and lower bounds of the problem, respectively, and
is a uniform random number in [0, 1]. This strategy is usually used to initialize the position of the population of the swarm intelligence algorithms.
3.2. Optimization Phase
Particularly,
represents the fragrance of the
i-th butterfly in the
t-th iteration, it can be calculated as:
where
c is the sensory modality, it can be set to a random number in (0, 1) during the search stage of the HFBOA. Due to the interval (0, 1) of parameter
c, we use the chaotic strategy to update its value with a one-dimensional chaotic mapping, named logistic mapping. In the original BOA, the power exponent
a is set to 0.1, thus, we also take it in the proposed method in the following experiments.
3.3. Global Search
We take the parameter
r into consideration so that
is used to replace it. Hence, the mathematical model of the butterflies’ global search movements of the proposed approach can be formulated as follows:
where
represents the solution vector
of the
i-th butterfly in the
t-th iteration and
is a random number in (0, 1).
is the current best solution found among all the solutions in the current stage. To some extent, parameter
can be regarded as a scaling factor, which is utilized to adjust the distance between the
i-th butterfly and the best solution.
3.4. Local Search
Two phases of the HFBOA should be switched when the individuals search the optimal value. We take vision of butterfly into the local search phase of the HFBOA. Thus, this search stage of butterfly can be formulated as follows:
where
and
are the
j-th and
k-th agents, which are chosen randomly from the solution space. Further,
is a random value such that
.
is a random number in [0, 1]. The attractiveness
can be formulated as:
where
is the attractiveness when
. The initial value of parameter
is usually set to 1, that is,
= 1.
represents the distance between
and
, which calculates by the 2-norm. The formulation of
is:
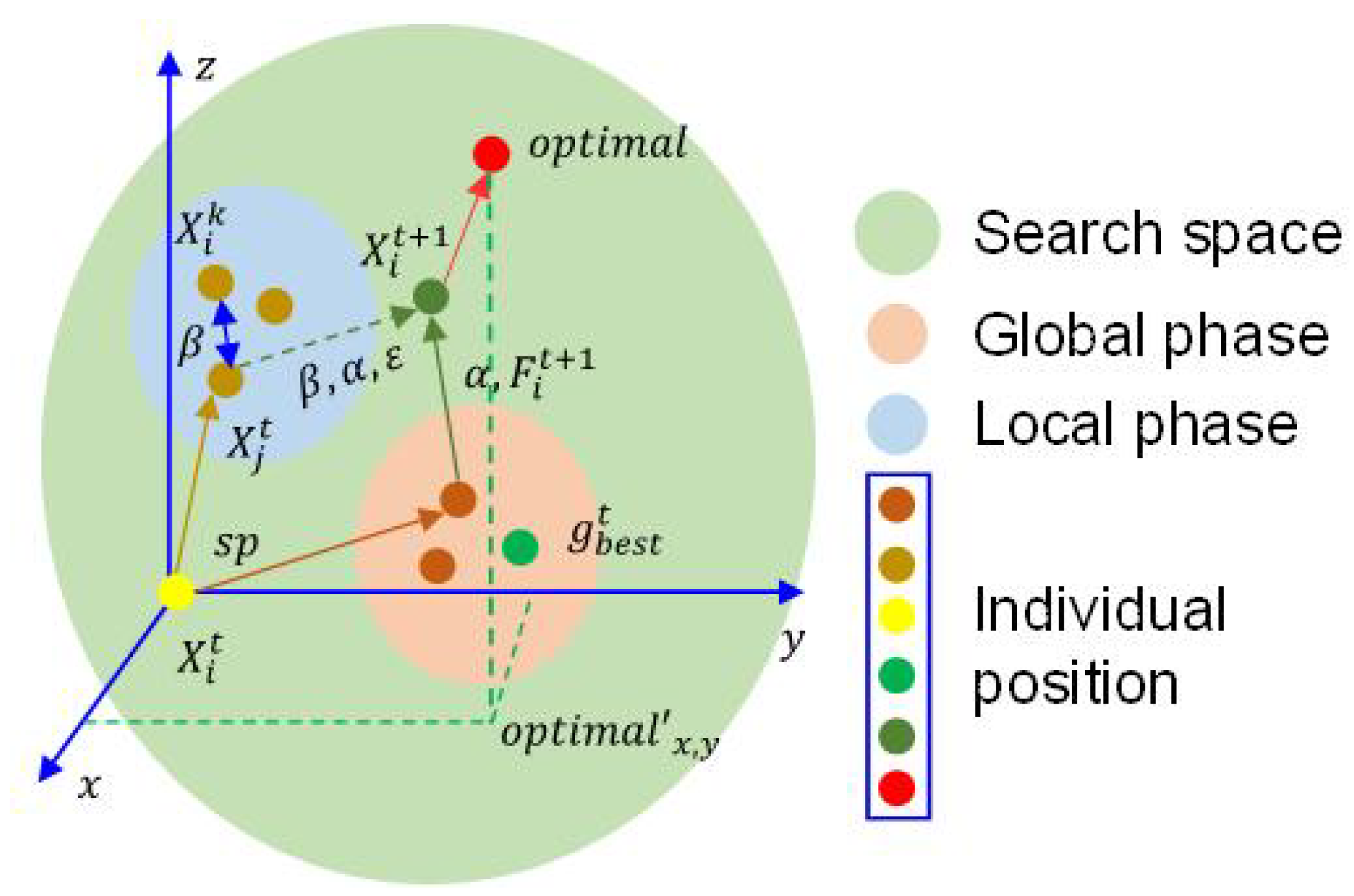
According to the four phase analysis, the optimization process of the proposed HFBOA can be shown briefly in
Figure 1.
3.5. Switch Parameter
The switch parameter is set to convert the normal global search and the intensive local search. In each iteration, it randomly generates a number in [0, 1], which is compared with the switch probability sp to decide whether to conduct a global search and local search. While the value of is set to 0; that is, only the local search stage is performed. On the contrary, only the global search phase is carried out with the value taken to 1.
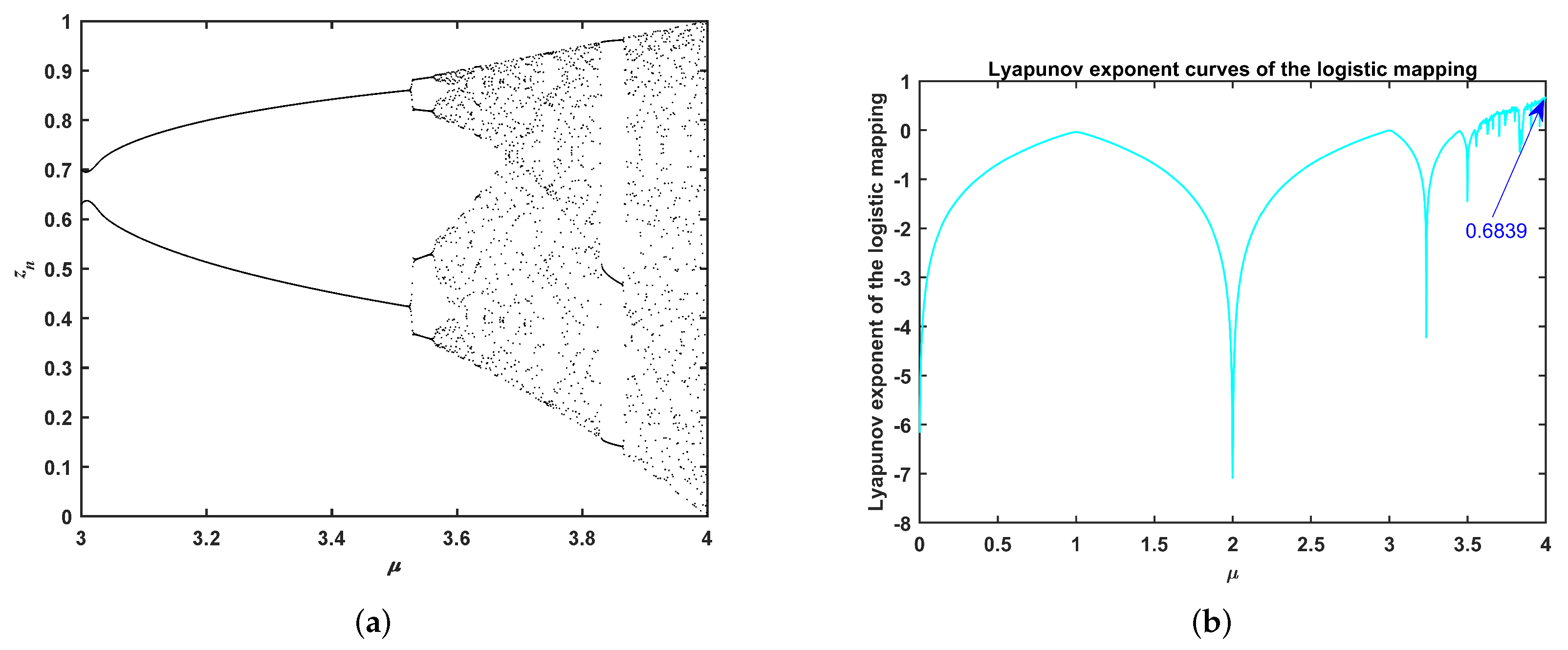
3.6. Chaotic Map and Parameter
Chaos is a relatively common phenomenon in nonlinear systems. Logistic mapping [
23] is one classical mapping of the one-dimensional maps, it is defined as:
where
denotes the chaotic factor,
. The chaotic system is characterized by initial value sensitivity. Therefore, we analyze the speciality of the logistic mapping, where
Figure 2 shows chaotic bifurcation and the Lyapunov exponent of the chaos. When
= 4 and
= 0.35, the chaotic sequence and Lyapunov exponent of logistic mapping are in (0, 1) and 0.6839, respectively.
As we known, as long as the initial value is not 0.25, 0.5, and 0.75, the iterative value will not produce a fixed point of the logistic mapping strategy. Thus, this chaotic mapping is used to update the parameter c of the proposed HFBOA, where = 4 and is set to 0.35 in the following experiments.
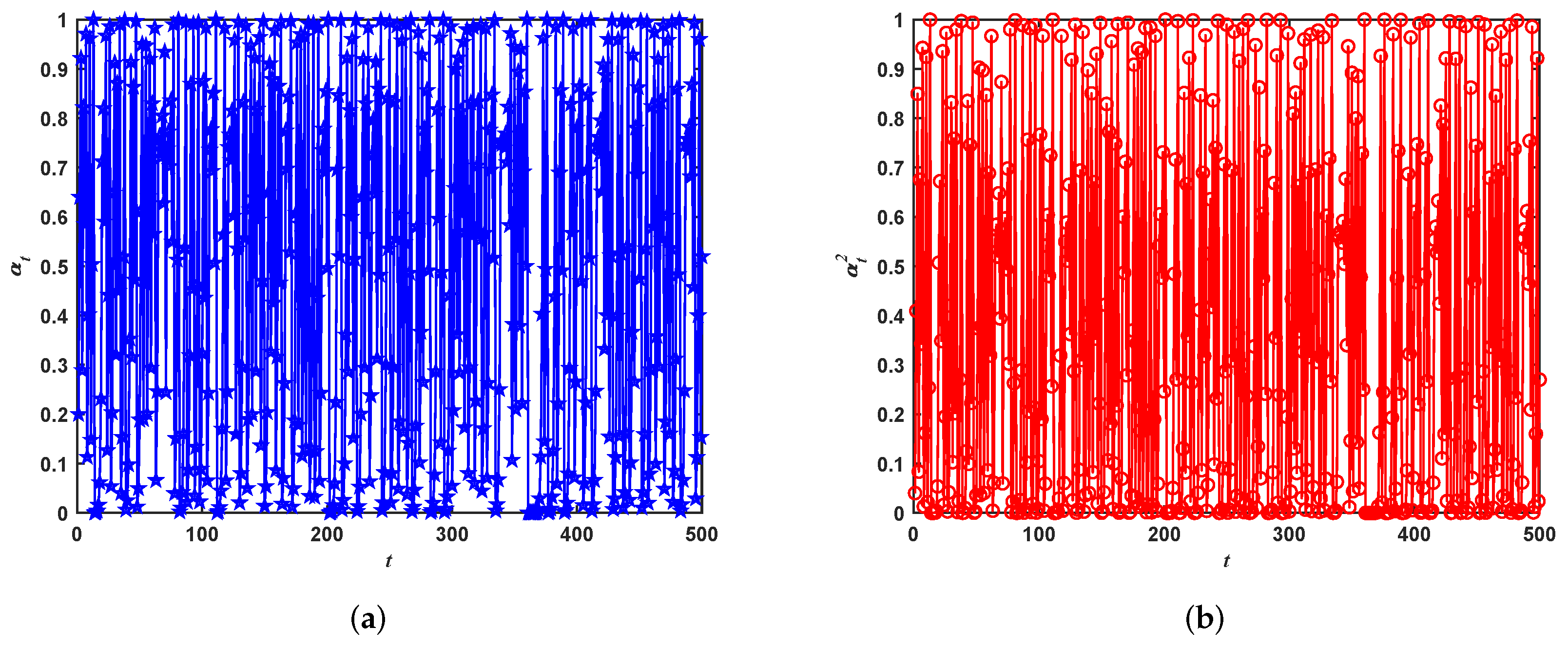
The parameter
is updated using chaotic strategy, which substituted the strategy of rand in (0, 1) each iteration. The formula is as follows:
where the initial value of parameter
is set to 0.2, and the maximum number of iterations is set to 500 during the optimization process. Thus, the iteration results of
and
are shown in the
Figure 3. The reason the initial value
is set to 0.2, not 0.35, is the direct difference of parameters
c and
.
In this paper, parameters
c and
are updated by logistic mapping. It can been seen from
Figure 2 and
Figure 3 that the values of
c and
are in (0, 1), which is the same as a rand number in (0, 1) using function
each iteration.
3.7. Complexity Analysis
The time complexity is a important factor, which can reflect the performance of the algorithm in a way. It is necessary to compute the time complexity of the algorithm when the algorithm has a finite time to find the global optimal value. The pseudo-code of the proposed algorithm is shown in Algorithm 1, and it shows the steps of the proposed HFBOA.
| Algorithm 1. The pseudo-code of HFBOA |
| | Generate the initialize population of the butterflies randomly; |
| | Initialize the parameters , and |
| | Define sensory modality c, power exponent a and switch probability p |
| | for |
| | Calculate the fitness value of each butterflies |
| | end for |
| | while |
| | for |
| | Update the fragrance of current search agent by Equation (6) |
| | for |
| | if |
| | Update the attractiveness and by Equation (9) and Equation (10) respectively |
| | else |
| | Continue |
| | end if |
| | % |
| | if |
| | Update the position using Equation (7) |
| | else |
| | Update the position using Equation (8) |
| | end if |
| | % |
| | if |
| | Update the position using Equation (3) |
| | else |
| | Update the position using Equation (8) |
| | end if |
| | Calculate the fitness value of each butterflies |
| | Find the best fitness |
| | end for |
| | end for |
| | Update the value of power exponent c and parameter using Equations (11) and (12) |
| | |
| | end while |
| | Output the best fitness |
According to the pseudo-code, the time complexity of the proposed method can be computed as follows. The initialization phase depends on randomization, which gives
random numbers in (0, 1). For the initialization, there are
n butterflies and the object function is the
d dimension of the search space; thus, the initialization step costs
. In addition, the maximum evaluation times
also influence the time complexity. The computational complexity of calculating the fitness of all agents is
. Updating the position in the HFBOA is
, the quick sort is
, and updating the parameter costs
. Therefore, the final computational complexity of HFBOA is as follows:
However, the original BOA has the same initialization numbers (
n), maximum evaluation times (
), and the dimension of search space (
d) as the proposed HFBOA. The time complexity of the initialization phase is
; calculating the fitness of all agents is
; updating the position is
; the quick-sort is
; updating the parameter costs
. Hence, the time complexity of the BOA is:
Distinctly, although the complexity of the proposed HFBOA is higher than BOA, the performance of the modified algorithm is superior to the BOA and both of them are in the same order of magnitude. The scalability, convergence accuracy, optimization capability, and robustness of the proposed method can be proved in the following experiments, including the scalability test, 12 benchmark functions test, and constrained engineering problems test, respectively.
4. Results of Experiments
In this section, the performance of the HFBOA is substantiated extensively. To verify the performance of the proposed algorithm, 12 benchmark functions from the CEC benchmark functions were tested. Moreover, three experiments were performed with proposed algorithms and other well-known meta-heuristic methods for scalability analysis and statistical analysis, respectively. In addition, the proposed HFBOA was also applied to deal with the six constrained engineering problems.
The experiments were carried out on the same experimental platform. The comparison of all algorithms was conducted in MATLAB 2018a installed over Windows 10 (64 bit), Intel (R) Core (TM) i5-10210U, and @2.11G with 16.0 GB of RAM.
Different types of benchmark functions can help comprehensively evaluate the performance of all competitions in a study of the proposed method.
Table 1 shows the 12 benchmark functions, including four unimodal (F1–F4), three multimodal (F5–F7), two fixed (F8, F9) [
9], shifted (F10), rotated (F11), and rotated and shifted functions (F12) [
24].
The performance of the HFBOA was proved by a set of statistical tests conducted on three criteria, the mean (Mean), standard deviation (Std), and success rate (
); values of all runs are presented. Here, the success rate (
) can be calculated as follows:
where
denotes the total number of optimization test runs, and
is the times the algorithm successfully reached the specified value. Here, the specified values are shown in
Table 1.
4.1. Scalability Analysis of Comparison with Improved Algorithms
The performance of the modified butterfly optimization algorithms was improved to a certain extent. Thus, two test functions F1 and F7 from
Table 1 were used to verify the performance of HFBOA compared with four improved algorithms, namely LBOA [
16], IBOA [
13], MBOA [
14], and HPSOBOA [
15]. The values of parameter settings of the algorithms were from the original references. In addition, four different dimensions of scalability analysis were considered: 30, 100, 500, and 1000. The same conditions were constructed using 30 individual butterflies with 600 iterations.
It can be seen from
Table 2 that the mean optimal value of the test function increased when number of dimension increased.
Table 2 shows the comparison results of different comparison algorithms, and the bold face indicates the superior performance of the HFBOA in F1 and F7, except MBOA. Generally speaking, it can be considered as a large-scale complex problem when the dimension of the test function exceeds 300.
4.2. Results of Comparison with Meta-Heuristic Algorithms
To verify the performance of the proposed HFBOA, we compared the proposed algorithm with several meta-heuristic algorithms, namely, PSO [
1], CS [
25], FA [
8], GWO [
9], HBO [
26], and BOA [
12]. The parameter settings of the seven approaches are shown in
Table 3. The population number of each algorithm was set to 30, and the max iteration was set to 600. Moreover, statistical tests were conducted on three divisions, and each algorithm was run 30 times, independently.
The comparison results of the mean (Mean), standard deviation (Std), and success rate (
) are shown in
Table 4. The Wilcoxon rank-sum (WRS) [
27] test was used to verify the significance of the proposed method when compared with other algorithms, and the Friedman rank [
28] test was used to rank compared approaches. The alpha was set to 0.05 in the WRS and Friedman rank test. Two hypotheses (null and alternative) were used to prove the effectiveness of statistical tests. According to the statistical value, the null was accepted if the statistical value was greater than the value of alpha; otherwise, the alternative was accepted. The
p-value of the WRS test and the Friedman rank depicted that this supremacy was statistically significant.
Table 4 shows that the HFBOA yielded the best results on the 12 test functions with Dim = 30 except F10 and F12. For F9, the HFBOA obtained the optimal fitness value, which was close to other algorithms, but slightly worse. However, for F5 and F7, the CS algorithm also obtained the best solution of the theoretical optimal value. Additionally, combining the comparison results in
Table 4, we see that the HFBOA was better than others in the
rank, which was set to the specified value. The
of HFBOA was 100% except F10 and F12 because the complexity of function F10 and F12 was higher than the others in the 12 CEC benchmark functions. According to the Friedman test results, the order of seven comparison algorithms was HFBOA > CS > GWO > BOA > FA > HBO > PSO. Note, the last row in
Table 4, the Friedman rank results of the comparison algorithms depicted that the supremacy of the proposed method was statistically significant.
As can be concluded from
Table 4, the proposed HFBOA has superior convergence accuracy and optimization capability in unimodal and multimodal functions than other comparison algorithms, especially the basic BOA. For the fixed functions F8 and F9, the optimization results of CS algorithm were slightly better than HFBOA in
. For the shifted, rotated, and shifted functions F10 and F12, the performance of the proposed method can be further improved in future work.
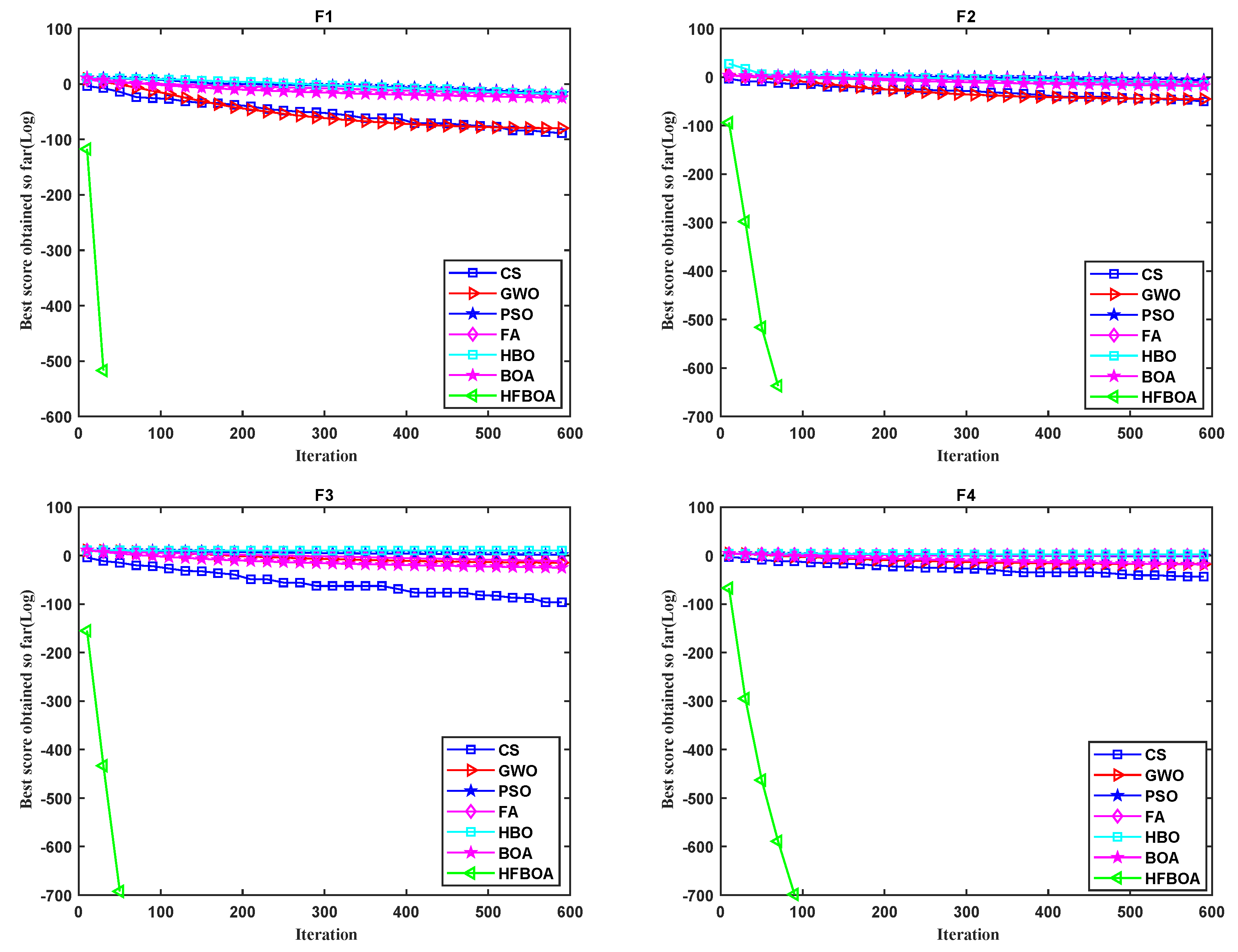
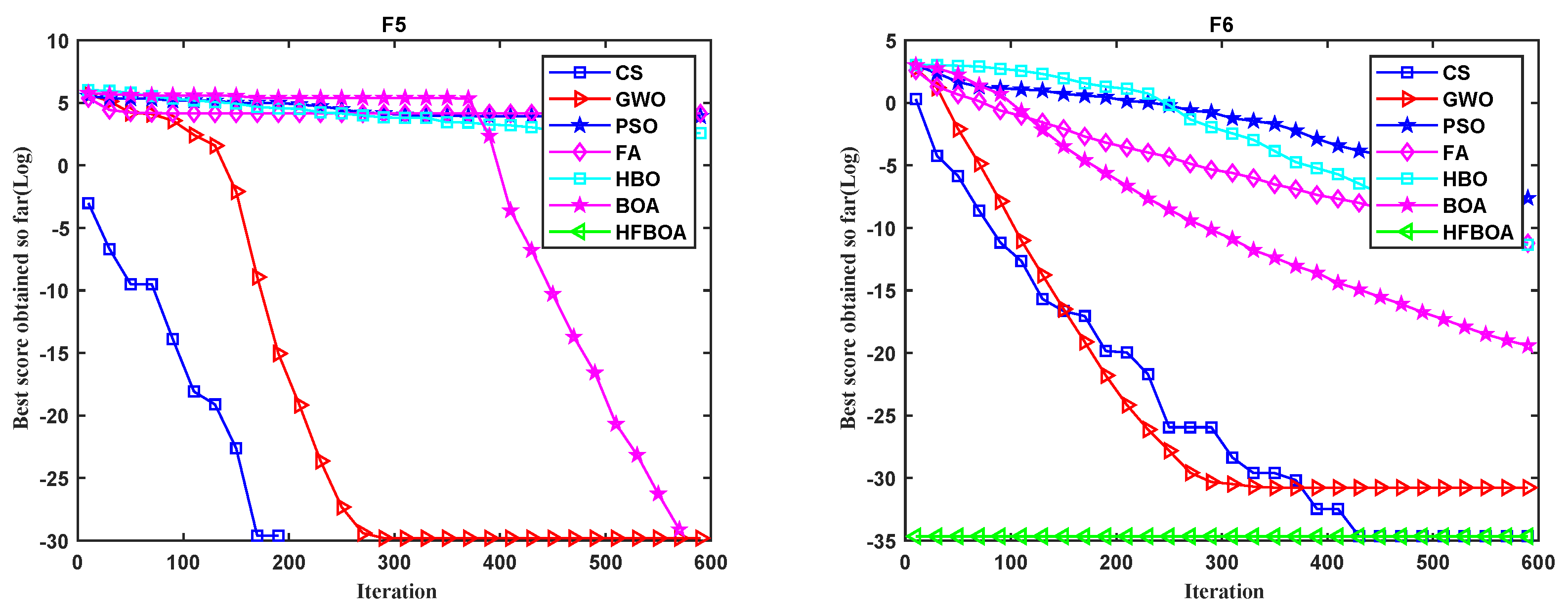
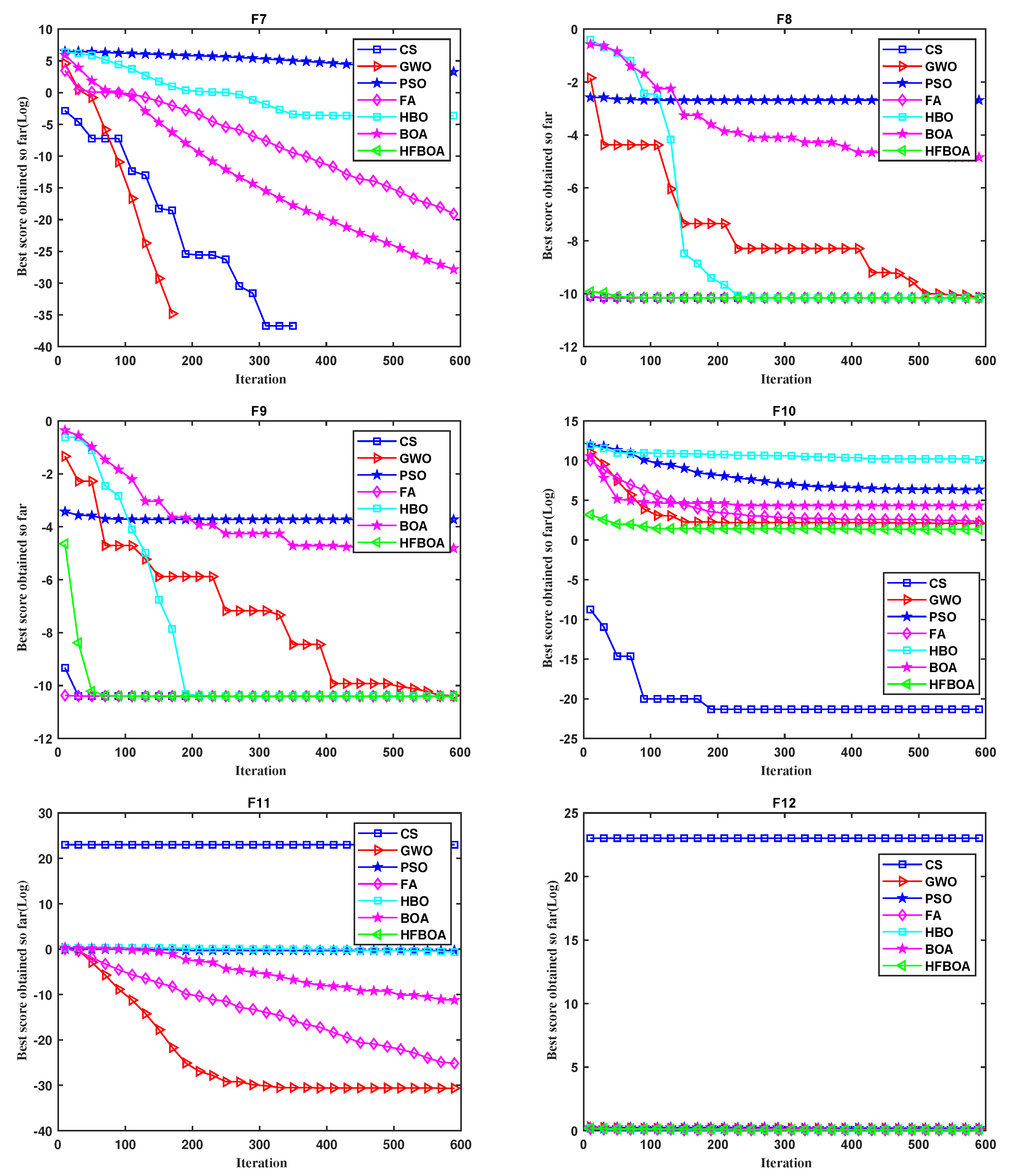
It can be seen from the convergence curves of comparison algorithms in
Figure 4 and
Figure 5 that HFBOA has the fastest convergence rate when solving the four unimodal and three multimodal test functions. In functions F1 to F5, and F7, HFBOA obtained the global optimal solution. From
Figure 4 and
Table 4, HFBOA converged to the global optimal value with a rapid convergence rate in F8, F9, and F11. However, the
of F8 and F9 by the CS algorithm was better than HFBOA, where NaN means not applicable in
Table 4. Furthermore, in function F12, the optimal value of HFBOA was slightly worse than FA from the
and
.
4.3. Practical Constrained Engineering Problems
In this subsection, six real-world optimization problems were solved to verify the effectiveness of the HFBOA. The constrained engineering problems (CEPs) are tubular column design [
25], three bar truss design [
29], tension/compression spring design [
25], welded beam design [
2], cantilever beam design [
29], and speed reducer design [
30]. All the considered engineering problems have several inequality constraints that should be handled. They can be formulated by the nonlinear programming (NLP) [
31,
32], which is formally described as:
Subject to:
,
,
where , is the objective function, and is the ith inequality constrain, which is defined on .
The dimension and constrain of the six constrained engineering problems can be summarized in
Table 5, and the iteration was set to 300 for each optimization problem using the proposed HFBOA and original BOA. Each constrained engineering problem was optimized as ten times and the statistical results are shown in
Table 6.
As can be seen from
Table 6, the performance of HFBOA was superior than BOA for solving the constrained engineering problems. The basic BOA had poor stability in CEP3, CEP4, and CEP6 from the statistical results. HFBOA denotes case 1 in the pseudo-code, and HFBOA1 represents case 2 in Algorithm 1, which is used to prove the effect of the updating strategy of parameter
with Logistic mapping instead of function
.
Table 6 shows that HFBOA was superior than HFBOA1 except CEP3 by the statistical results. For CEP3, HFBOA1 was better than HFBOA in the
, which indicates that the stability of HFBOA1 was higher for solving the tension spring design problem.
The statistical result verified that the performance of the proposed HFBOA was improved, and the robustness of the proposed method was proved for solving different constrained engineering problems. The best results of the state-of-the-art approaches are listed in
Table 7,
Table 8,
Table 9,
Table 10,
Table 11 and
Table 12 in this paper. We compared the best results obtained by the algorithms to show the convergence accuracy and optimization capability of the HFBOA.
4.3.1. Tubular Column Design
The tubular column design [
25] is one of the mechanical engineering issues, and can be formulated as follows:
Minimize:
Subject to:
where denotes the mean diameter of the column, is the column. Moreover, P is a compressive load, represents the yield stress, E is the modulus of elasticity, is the density, and L denotes the length of the designed column.
Variable range:
and , P = 2500 kgf, = 500 kgf/cm2, E = 0.85 × 10 kgf/cm2, L = 250 cm, and = 0.0025 kgf/cm3.
Table 7 presents the solutions of tubular column design obtained by HFBOA and those reported by CS [
25], Rao [
33], KH [
30], and CSA [
33]. As shown, the optimal value of HFBOA was
26.499503, which means that when
and
are set to 5.451157 and 0.291966, respectively, the total cost of the tubular column design is the minimum. It can be concluded that the results obtained by HFBOA were better than those of the previous studies.
4.3.2. Three Bar Truss Design
The mathematical modeling of the three bar truss design [
29] is given as follows:
Minimize:
Subject to:
where l is the length of the bar truss, and denote the cross-sectional areas of the long bar truss and short bar truss, respectively.
Variable range:
, l = 100 cm, P = 2 kN/cm2, and = 2 kN/cm2.
Table 8 presents the solutions of the three bar truss design obtained by HFBOA and those reported by CS [
25], MBA [
34], HHO [
35], and DSA [
36]. As shown, the optimal value of HFBOA was 263.895867, which means that when
and
were set to 0.78869137 and 0.408202602, respectively; the total cost of the tension/compression spring was the minimum. The results obtained by HFBOA were better than the CS algorithm and BOA with 300 iterations. However, the results of MBA, HHO, and DSA were slightly better than the proposed method.
4.3.3. Tension/Compression Spring Design
From Ref. [
25], the tension/compression spring design was modeled as follows:
Minimize:
Subject to:
The parameters , and N are the three design variables. Where denotes the wire diameter, represents the mean coil diameter, and is the number of active coils.
Variable range:
, , and .
Table 9 presents the solutions of the tension/compression spring obtained by HFBOA and those reported by PSO [
2], GWO [
9], WOA [
37], and GSA [
9]. As shown, the optimal value of HFBOA was
0.012666, which means that when
,
, and
are set to 0.051841, 0.360377, and 11.078153, respectively, the total cost of the tension/compression spring is the minimum. It can be seen from
Table 9 that the results obtained by HFBOA are superior than those of the previous studies, except the GWO algorithm.
4.3.4. Welded Beam Design
There were four main constraints and other side constraints of the welded beam design.
is the shear stress,
denotes the bending stress in the beam,
is the buckling load on the bar,
is the end deflection of the beam. The mathematical modeling of the welded beam design [
2] can be stated as follows:
Minimize:
Subject to:
where is the thickness of the weld, , and denote the length of the attached part, the height, and the thickness of the bar, respectively. Additionally,
,
, , ,
, , , ,
,
P = 6000 lb, L = 14 in., = 13,600 psi, = 30,000 psi, = 0.25 in., E = 30 × 10 psi, G = 12 × 10 psi
Variable range:
, , and .
Table 10 presents the solutions obtained by HFBOA and those reported by GSA [
9], GWO [
9], WOA [
37], and DSA [
36]. As shown, the optimal value of HFBOA was
1.725080, which means that when
,
,
R, and
L were set to 0.205607, 3.473369, 9.036766, and 0.205730, respectively, the total cost of the welded beam design was the minimum. Thus, it can be concluded that the results obtained by HFBOA were the best in the comparison algorithms.
4.3.5. Cantilever Beam Design
The variables of cantilever beam design were the
to
(heights or widths) of the different beam elements and the thickness was held fixed in the problem. The mathematical modeling of the cantilever beam design [
25] is given as follows:
Minimize:
Subject to:
where to denote heights or widths of the different beam elements.
Variable range:
and .
Table 11 presents the solutions of the cantilever beam obtained by HFBOA and those reported by CS [
25], MMA [
29], SOS [
38], and MFO [
39]. As shown, the optimal value of HFBOA was
1.339963, which means that when
,
,
,
, and
were set to 6.016838, 5.313519, 4.495334, 3.495149, and 2.152926, respectively, the total cost of the cantilever beam was minimum. As can seen from
Table 11, the results obtained by HFBOA were better than the comparison approaches.
4.3.6. Speed Reducer Design
According to Ref. [
30], the optimization problem of speed reducer design can be mathematically formulated as follows:
Minimize:
Subject to:
where is the face width, denotes the module of teeth, is the number of the teeth on pinion. is the length of shaft 1 between bearings, represents the length of shaft 2 between bearings, and are, respectively, the diameter of shaft 1 and shaft 2.
Variable range:
, , , , , and .
Table 12 presents the solutions obtained by HFBOA and those reported by CS [
25], KH [
30], MFO [
39], and DSA [
36]. As shown, the optimal value of HFBOA was 2999.0919, which means that when
,
,
,
,
,
, and
were set to 3.500036, 0.700001, 17, 7.3, 7.800207, 3.458402, and 5.245883, respectively, for speed reducer design. It can be seen from
Table 12 that the results obtained by DSA were better than other algorithms. Moreover, the optimal value of HFBOA was slightly worse than the KH algorithm and DSA.
6. Conclusions
To effectively solve constrained engineering problems, a novel hybrid-flash butterfly optimization algorithm (HFBOA) is proposed. The HFBOA combines smell and vision for foraging of global optimization and local optimization, respectively. Besides, updating the control parameters by logistic mapping is synchronously applied into the HFBOA for enhancing the global optimal ability. To evaluate the performance of the HFBOA, experiments were compared with the proposed algorithm and other meta-heuristic algorithms for statistical analysis on 12 benchmark functions.
Compared with seven algorithms, the results of the experiments show that the HFBOA has a significant improvement in terms of solution accuracy performance and convergence speed. Furthermore, the statistical test and complexity analysis are used to verify the efficiency of the HFBOA from different aspects. Moreover, the results on engineering design problems show that HFBOA has the vastly potential ability to deal with real-world problems as well.
In the future work, we will focus on the following tasks:
We will theoretically prove the convergence and steady properties of the proposed HFBOA using Markov chain theory [
40].
Due to the high complexity of the main framework of HFBOA, we will further enhance the HFBOA on the premise of ensuring the optimization precision with Quantum theory.
The proposed HFBOA will be further applied to solve the three-dimensional wireless sensor network node deployment problem.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}