
Fault Diagnosis Method Based on AUPLMD and RTSMWPE for a Reciprocating Compressor Valve



Abstract
:1. Introduction
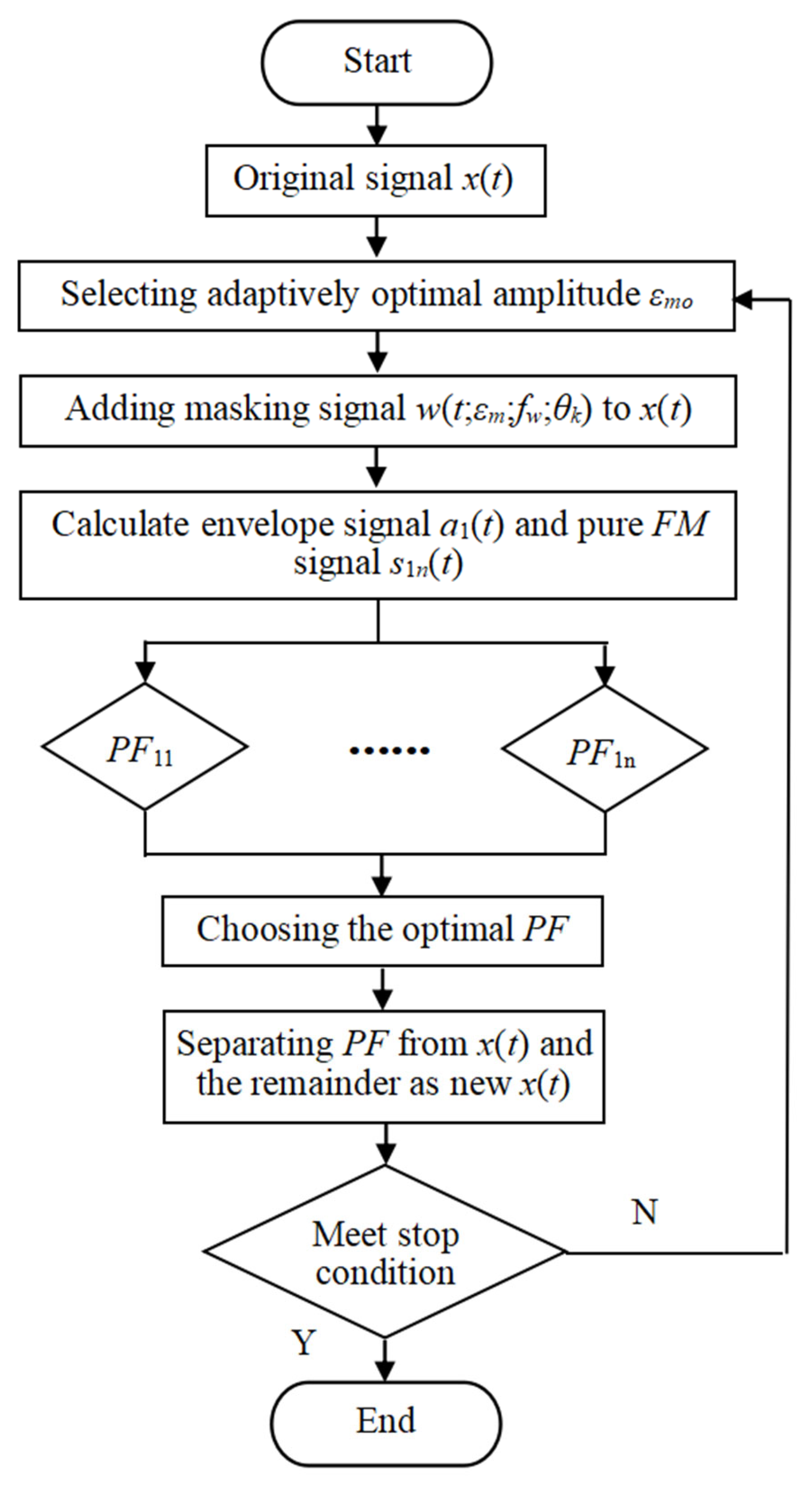
2. Adaptive Uniform Phase Local Mean Decomposition
2.1. Local Mean Decomposition
2.2. Uniform Phase Local Mean Decomposition
2.3. Adaptive Uniform Phase Local Mean Decomposition
- Step 1:
- Set the number of phases as np = 16, then adaptively select the optimal amplitude εmo in the given range and construct the masking signal w(t;εmo;fw;θk).
- Step 2:
- Decompose by LMD to obtain the first component , subtracting the narrow wave cosine signal w(t;εmo;fw;θk) from cm,k(t), the first component PF1j is obtained through averaging as .
- Step 3:
- Let j = j + 1, implementing step (2) until εm takes different values in the range of 0.10~0.5 and it obtains a series of PF1j components. The orthogonality index is used as the criterion to select the optimal PF1 component. The smaller the value of OI, the better the decomposition performance.
- Step 4:
- Separate the PF1 component from the original signal x(t), and use the remaining part ri(t) as a new signal. Then, repeat steps 1 to 3 until x(t) is finally decomposed into the sum of the PFs and a trend item.
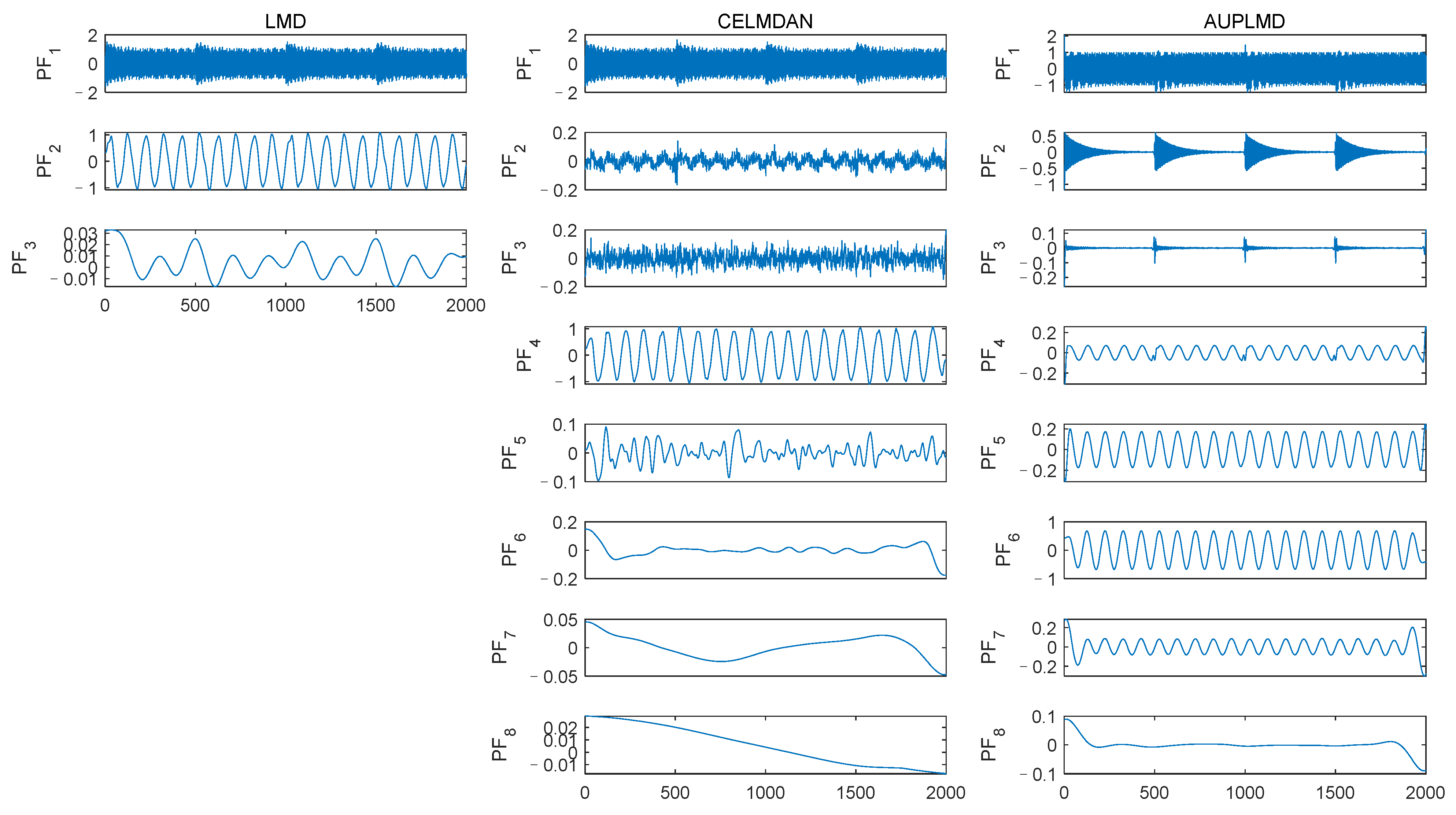
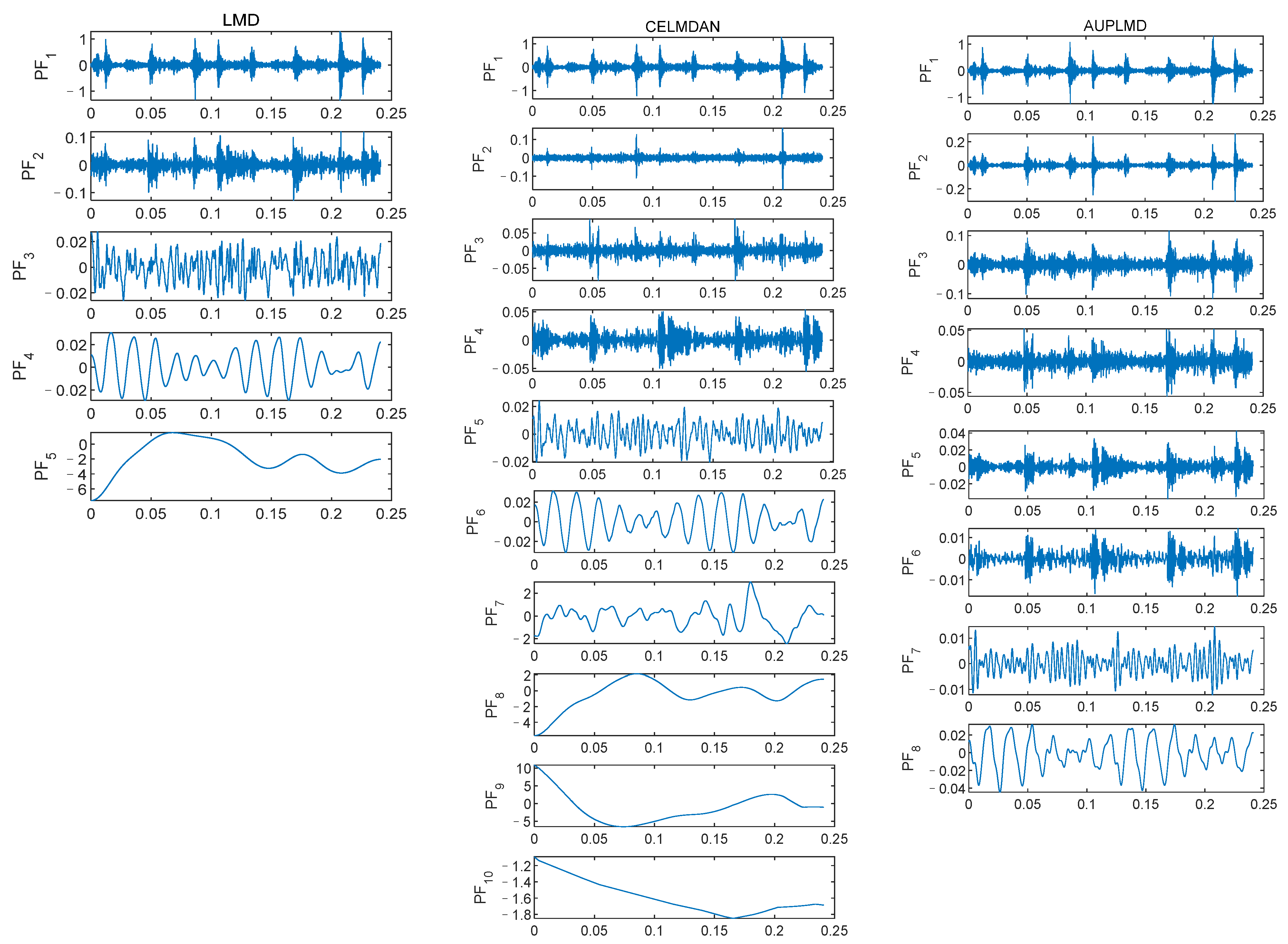
2.4. Comparison Analysis
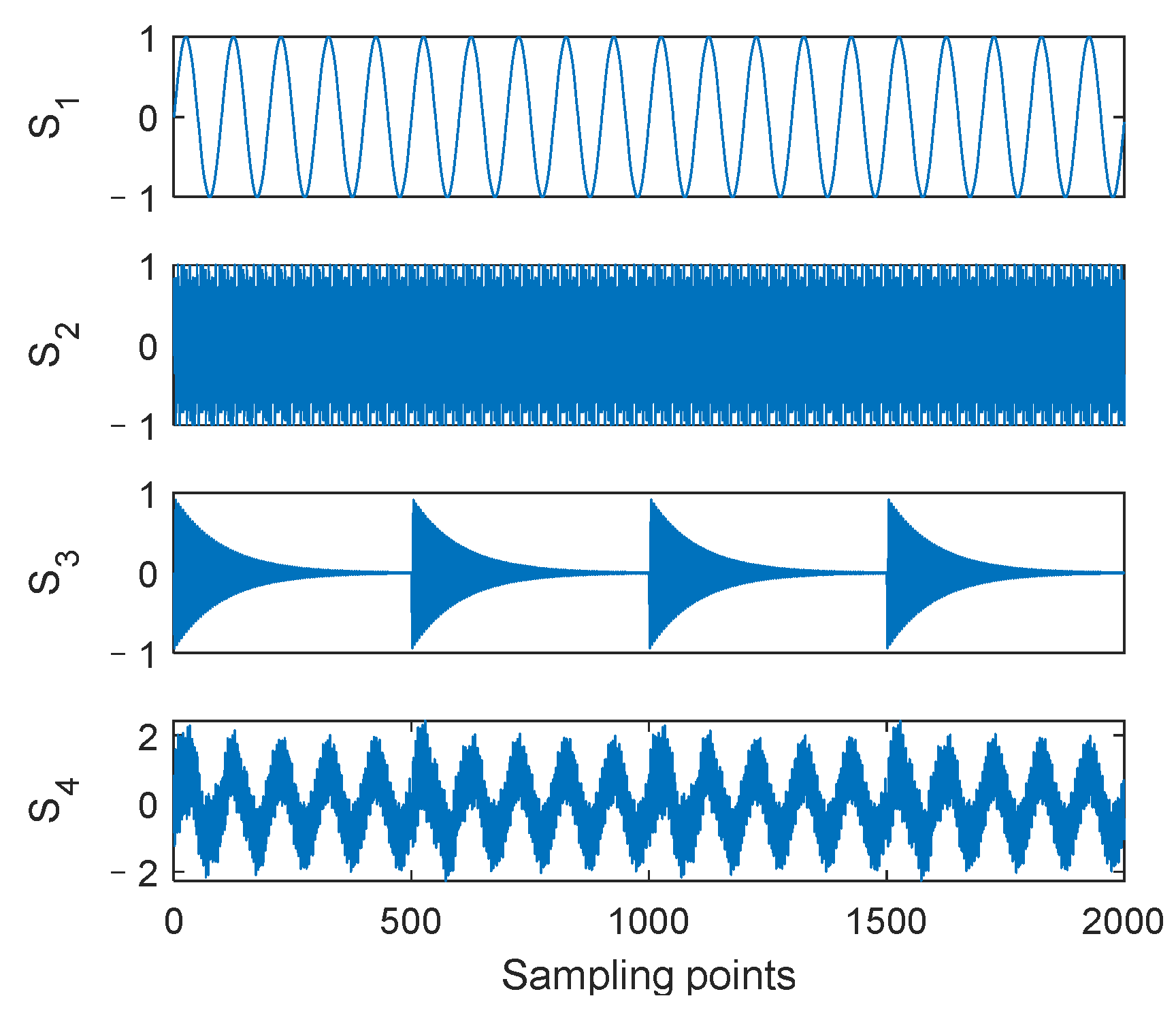
2.4.1. Simulation Signal Analysis
2.4.2. Valve Analog Signal Analysis
3. Refined Time-Shifted Multiscale Weighted Permutation Entropy
3.1. Multiscale Weighted Permutation Entropy
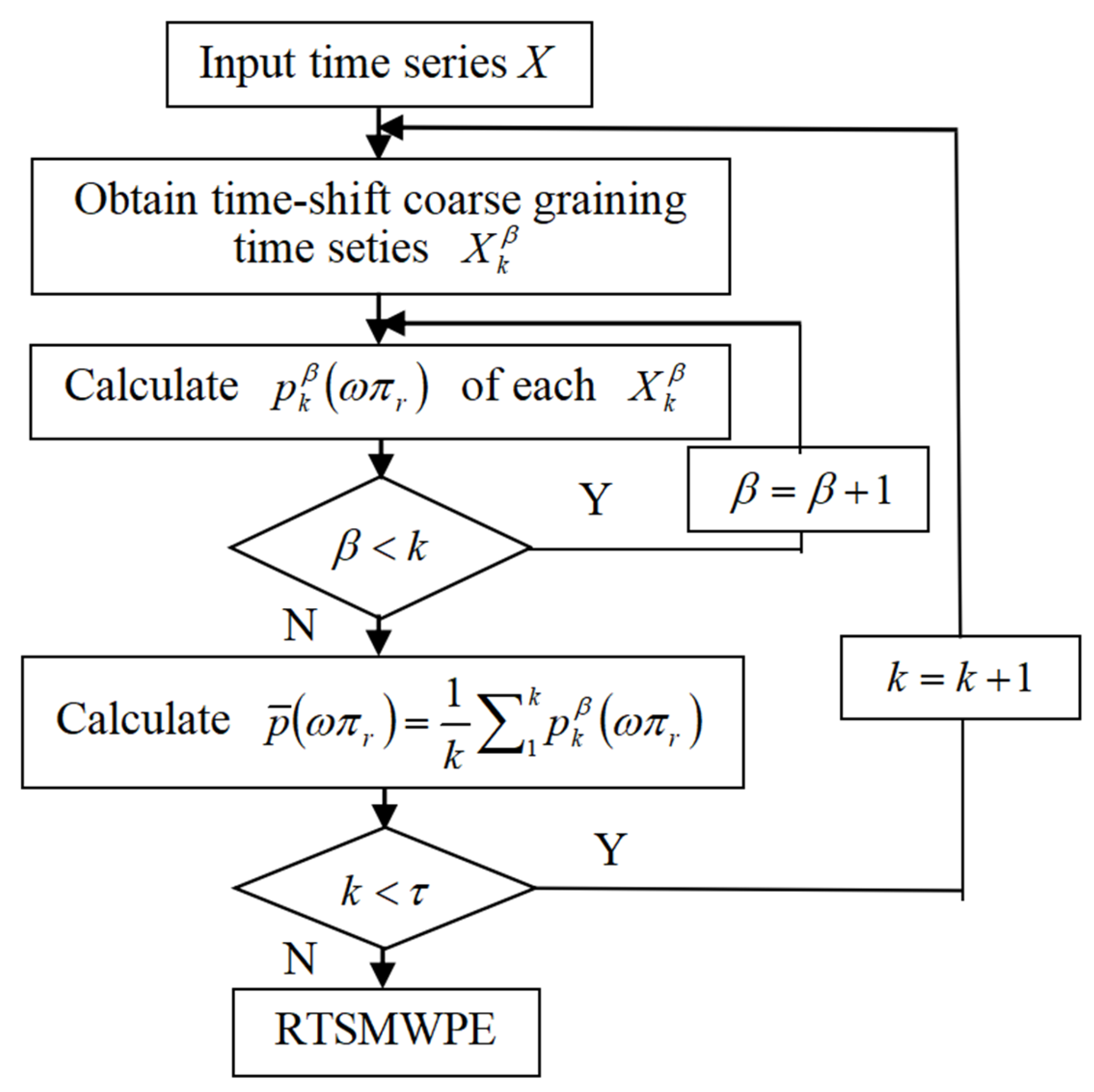
3.2. Refined Time-Shift Multiscale Weighted Permutation Entropy
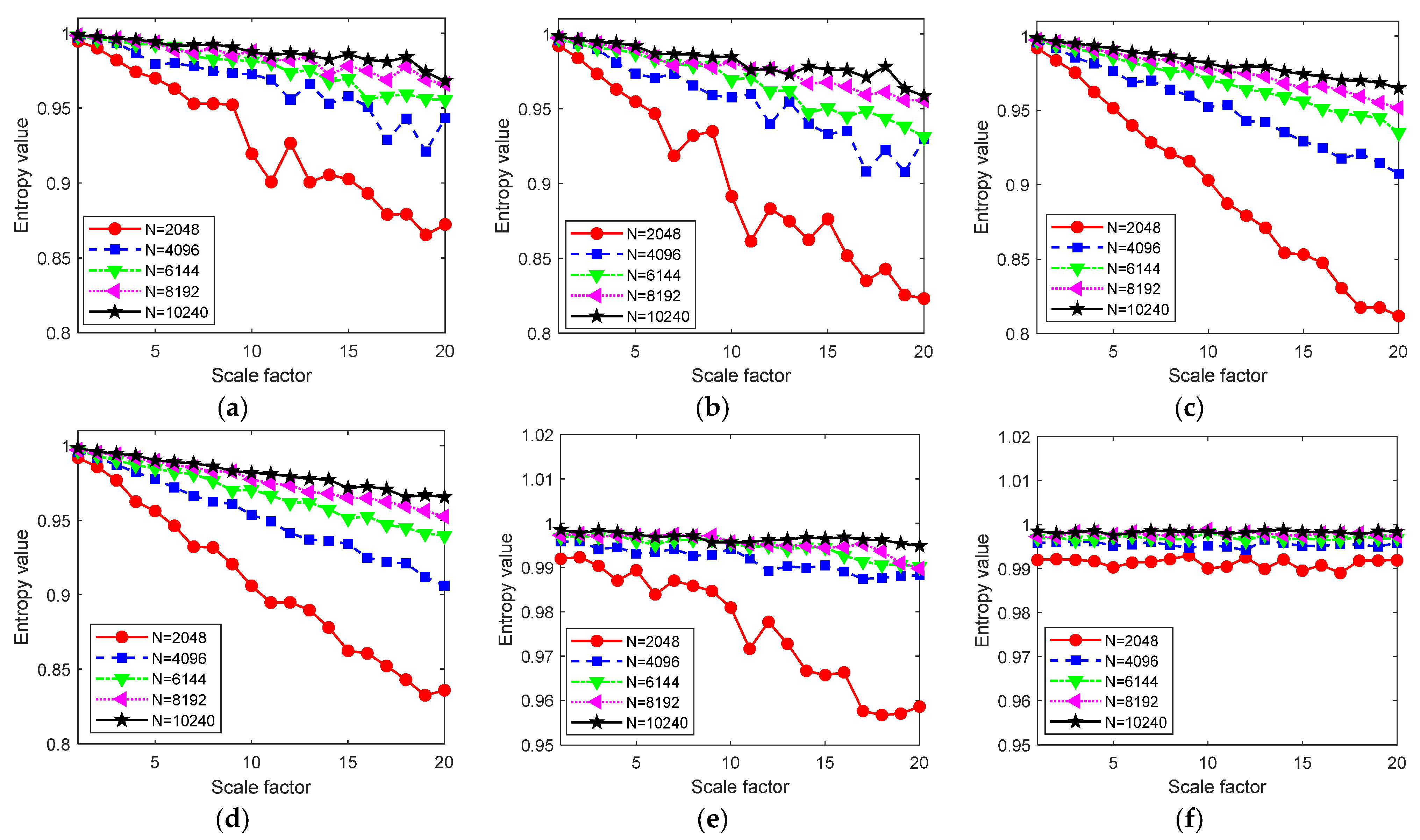
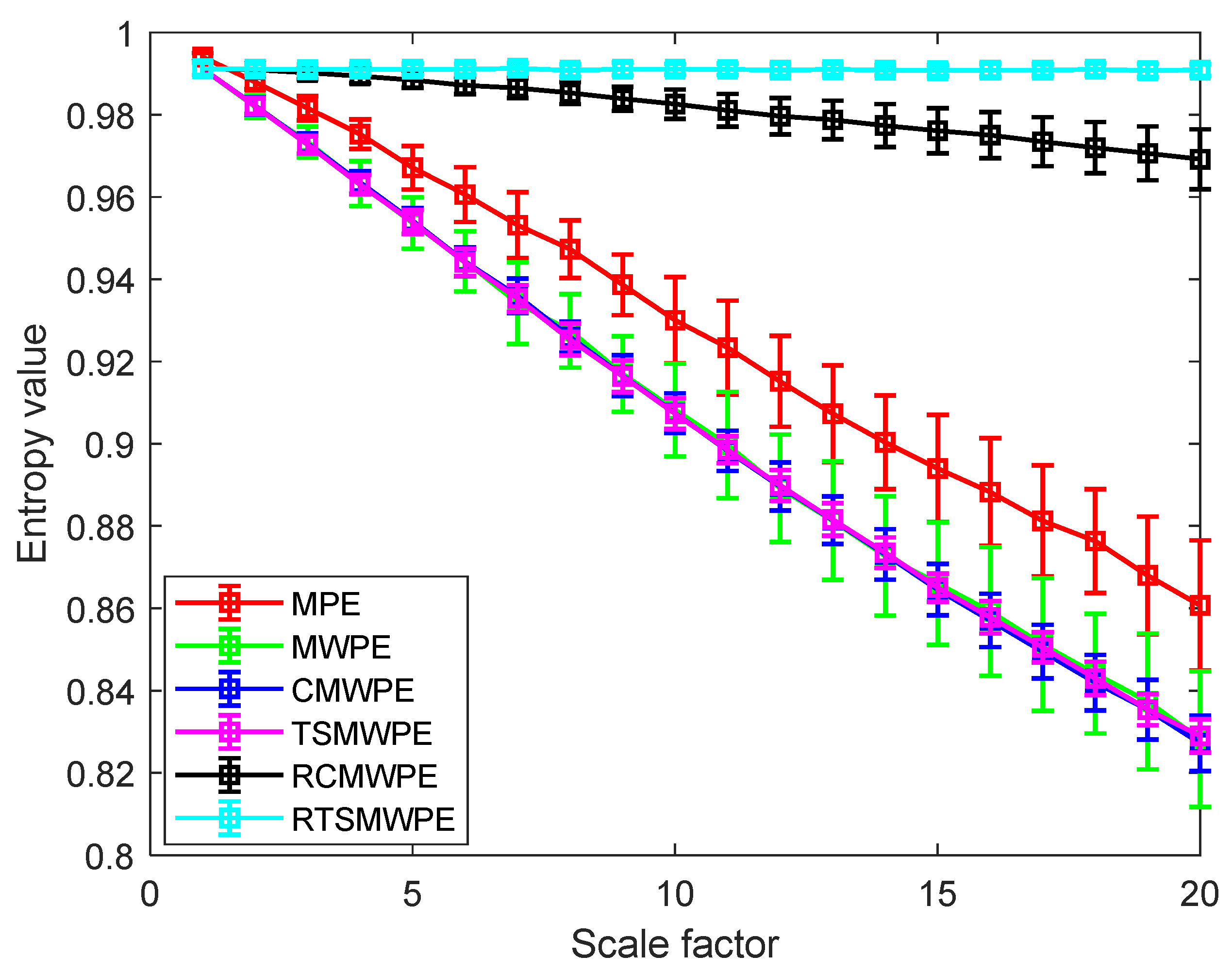
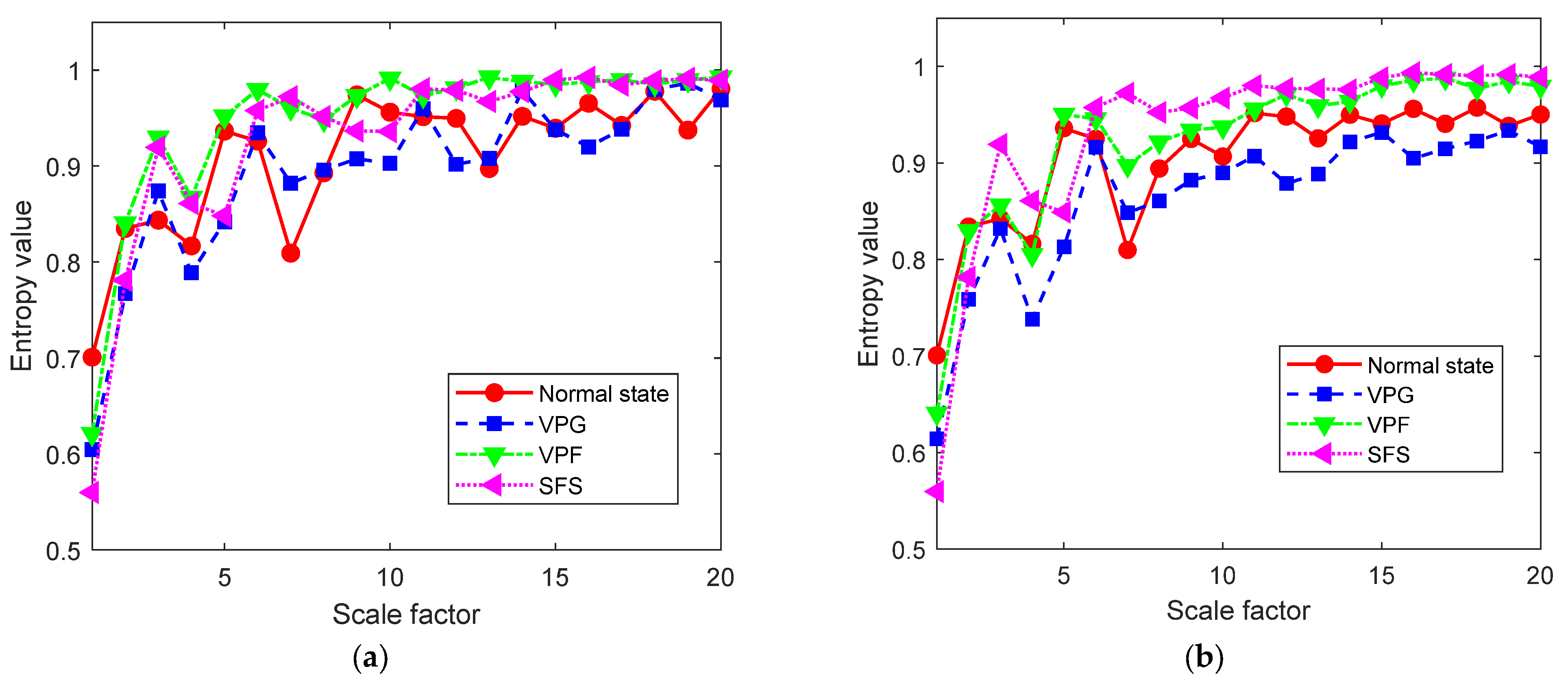
3.3. Comparison Analysis
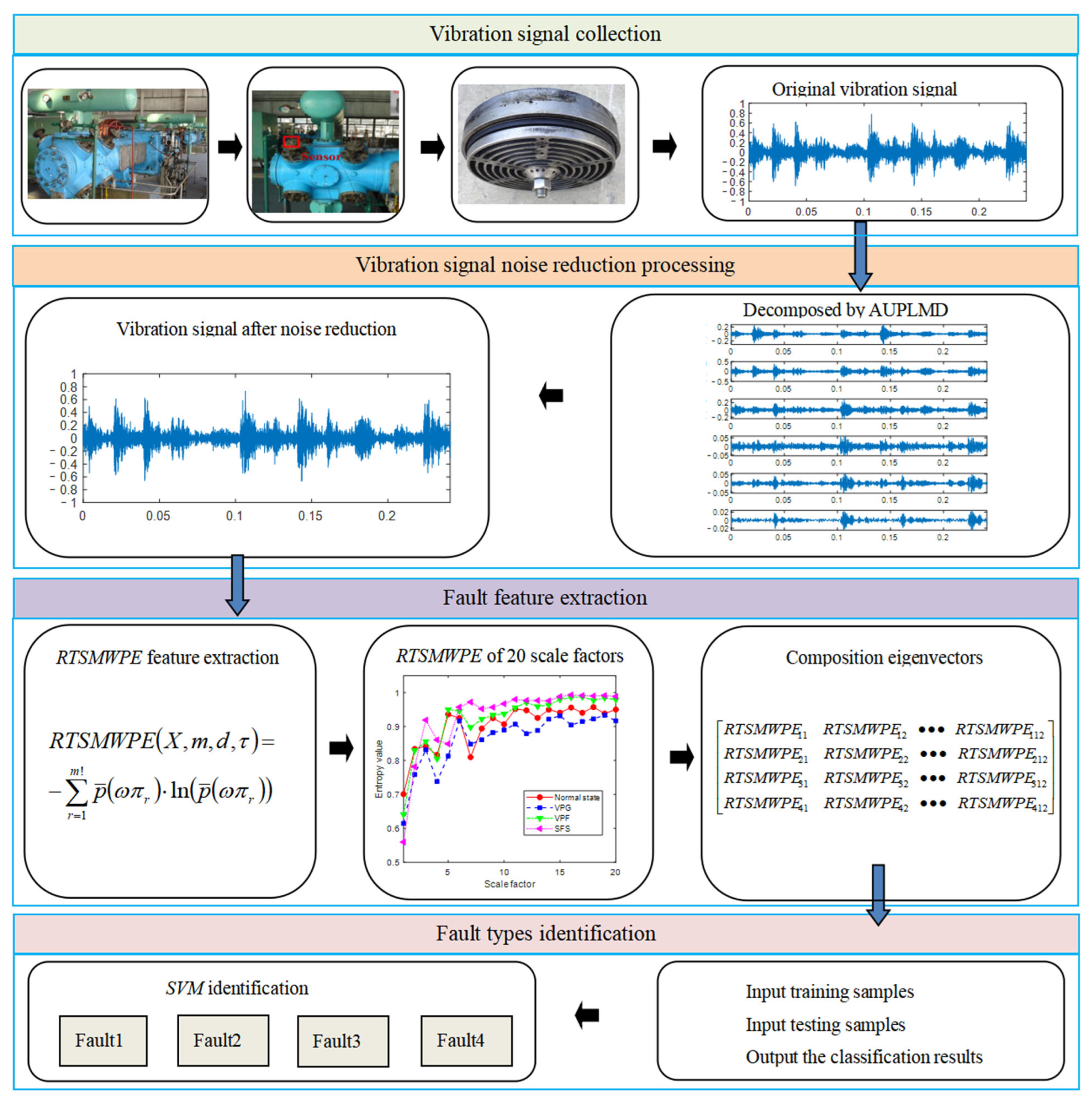
4. Fault Diagnosis Method of Reciprocating Compressor Valve Based on AUPLMD and RTSMWPE
4.1. Proposed Method
- Step 1:
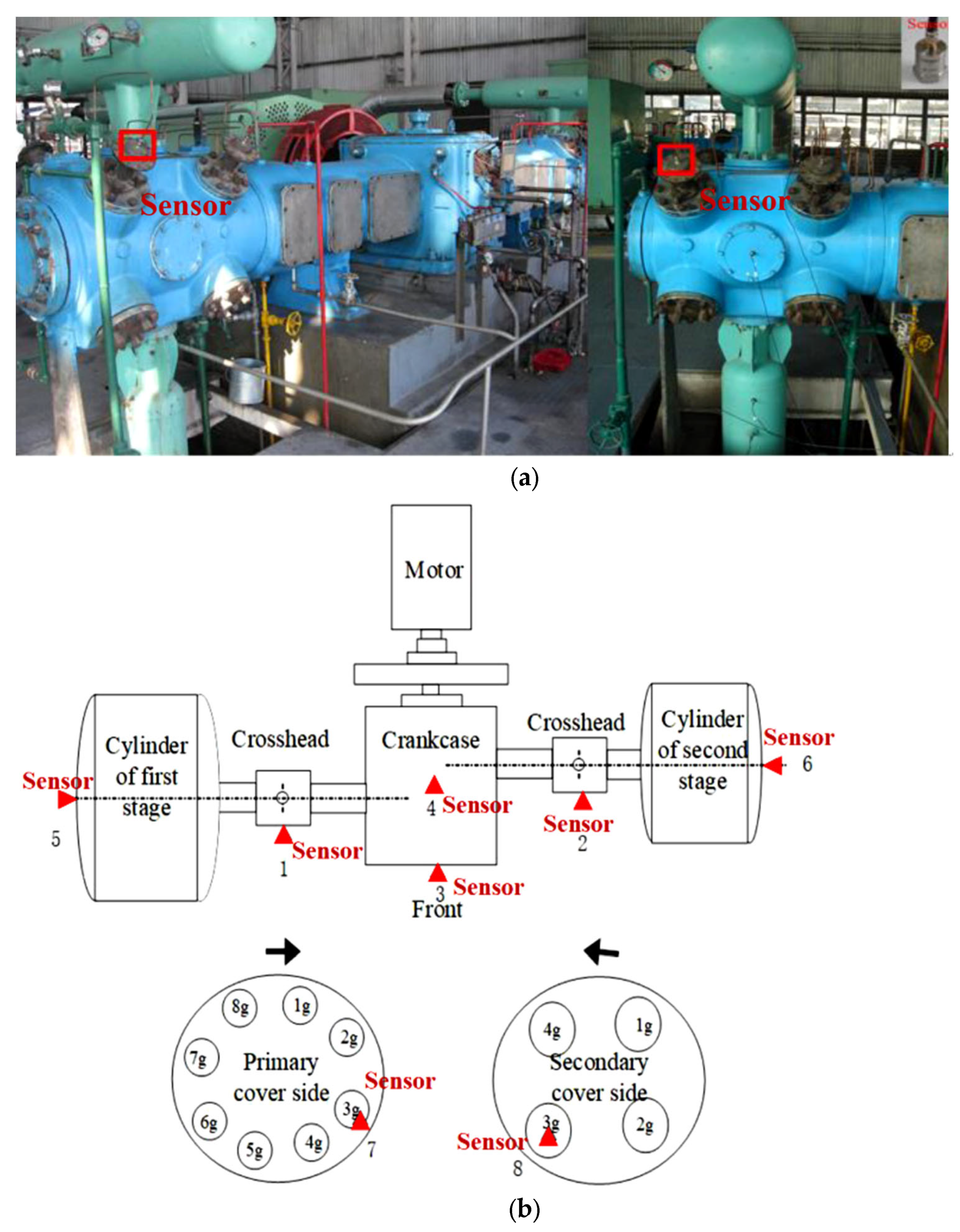
- The data acquisition under different health conditions is conducted;
- Step 2:
- The AUPLMD method is used to adaptively decompose the vibration signal of the valve under different fault states into nimf number of PFs, and use the kurtosis criterion to select the PF component that can significantly represent the fault characteristics and reconstruct the fault signal;
- Step 3:
- Quantization processing of the four reconstructed signals, the RTSMWPE values of the four reconstructed signals were solved separately in order to obtain the four fault eigenvectors of the reciprocating compressor valve.
- Step 4:
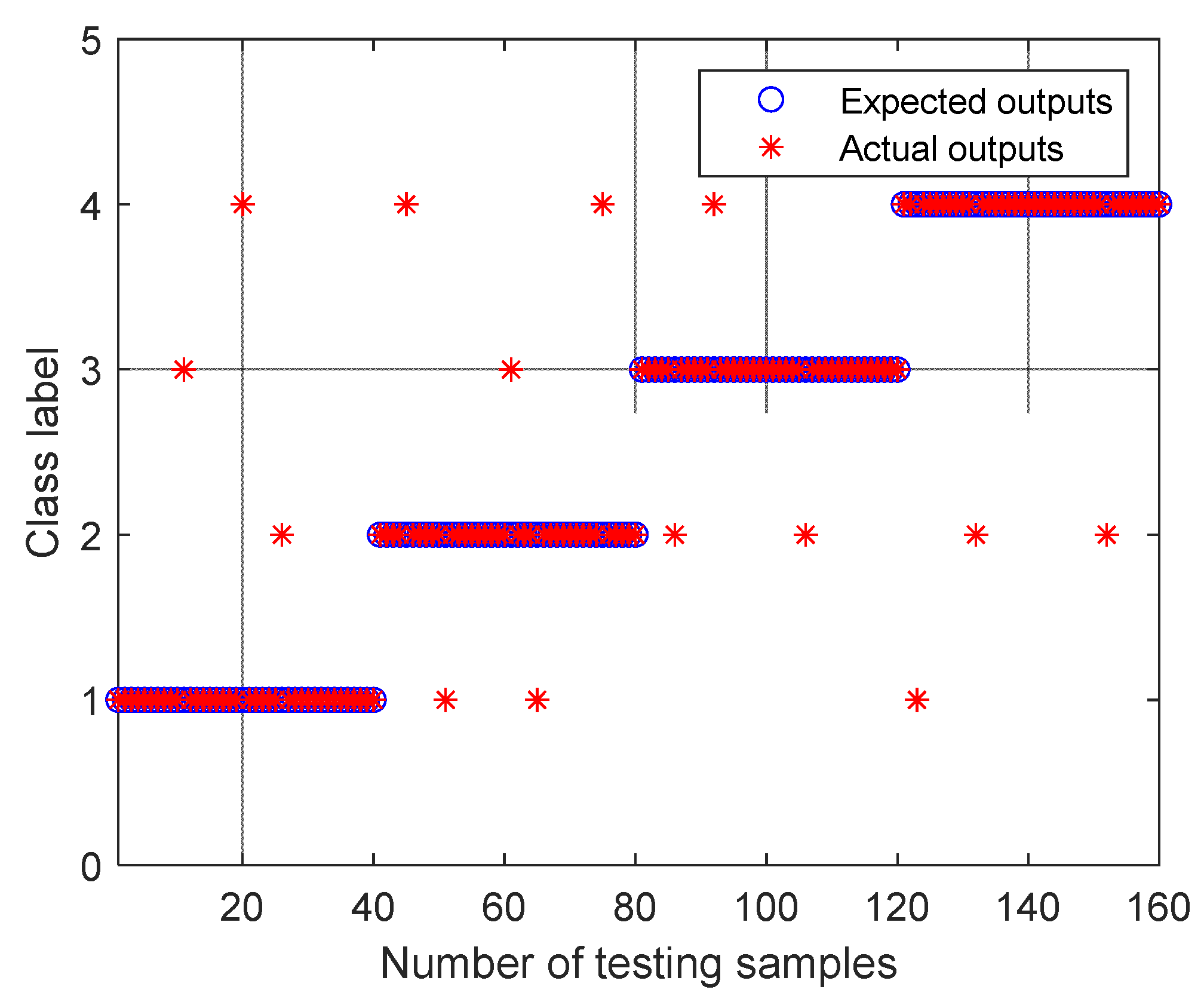
- Segment the data into 100 samples for each health condition and divide the obtained samples into the training set and testing set. Use a support vector machine (SVM) to train and test the valve fault feature vector to identify different fault types and sub-health conditions.
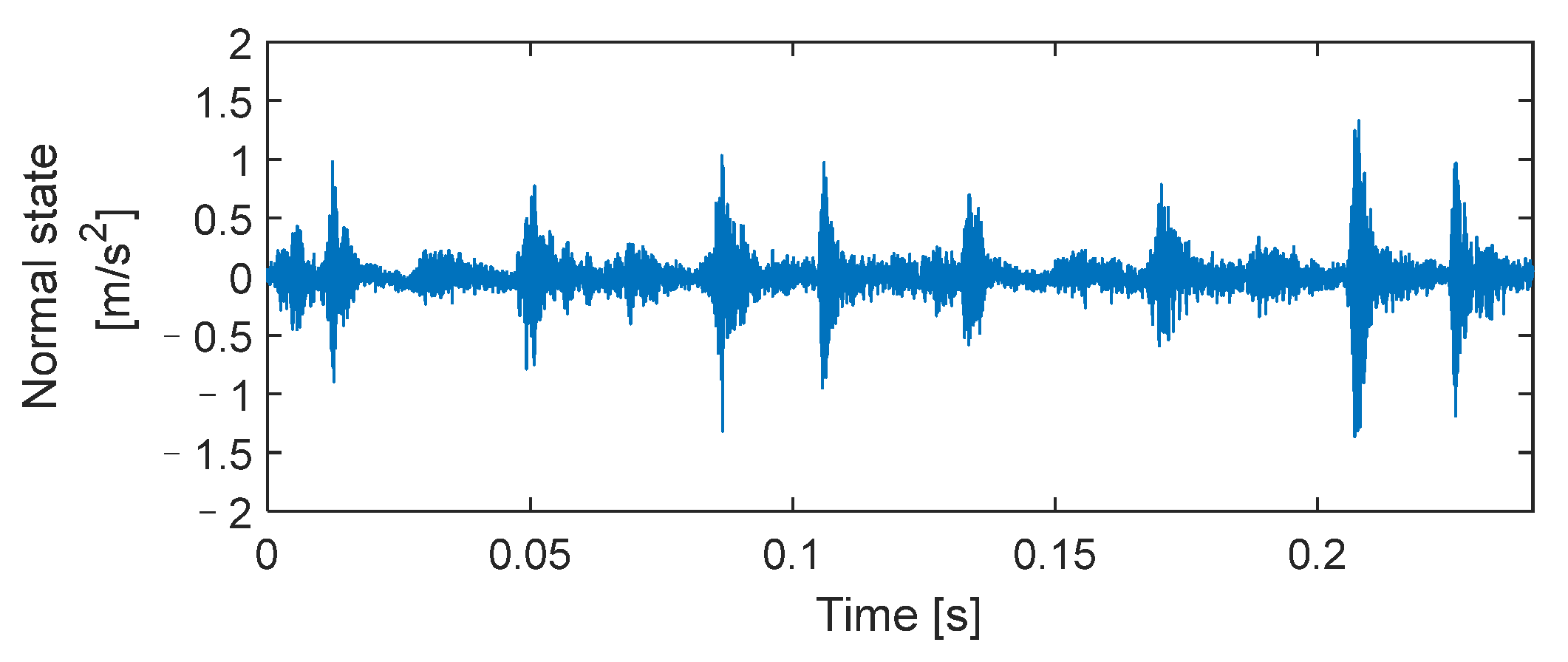
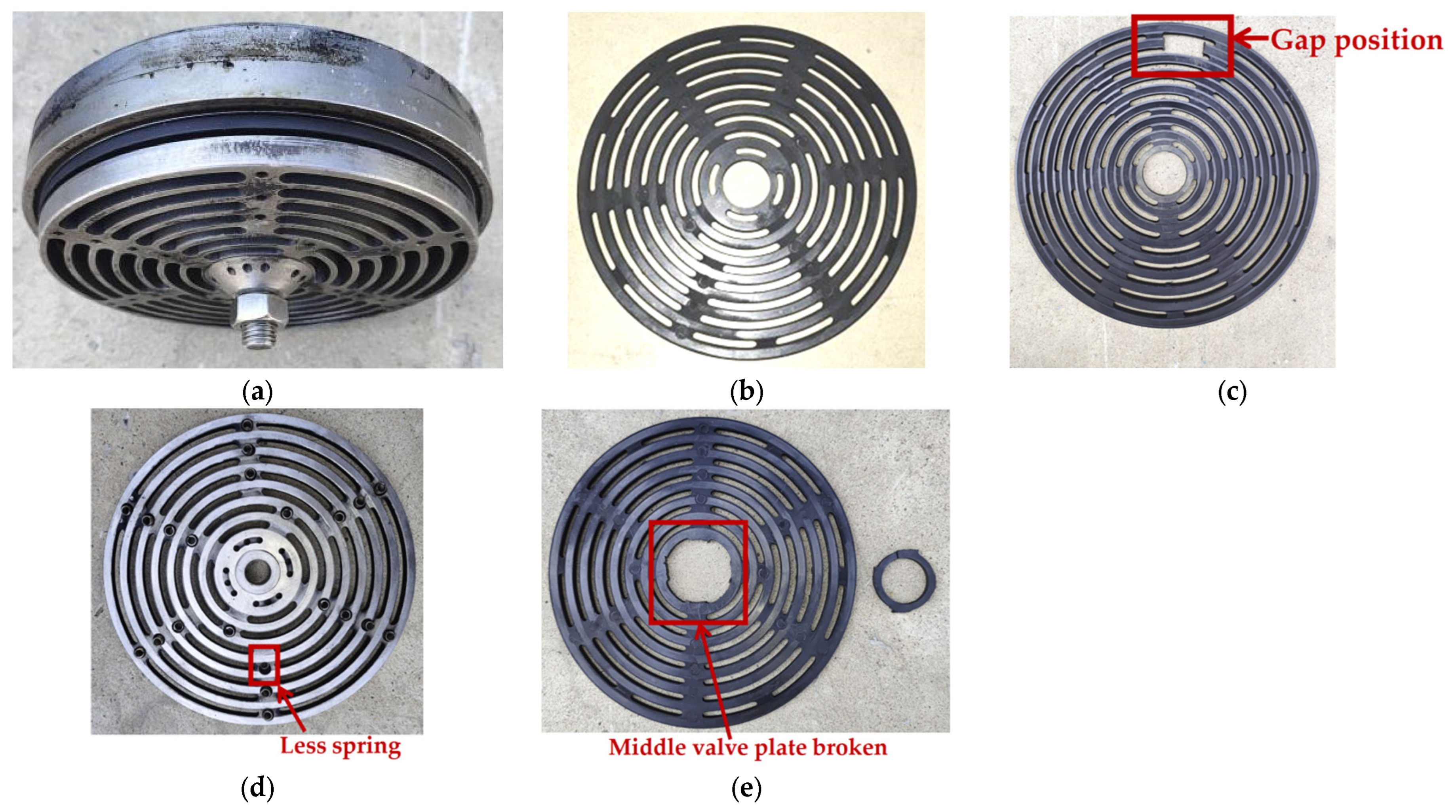
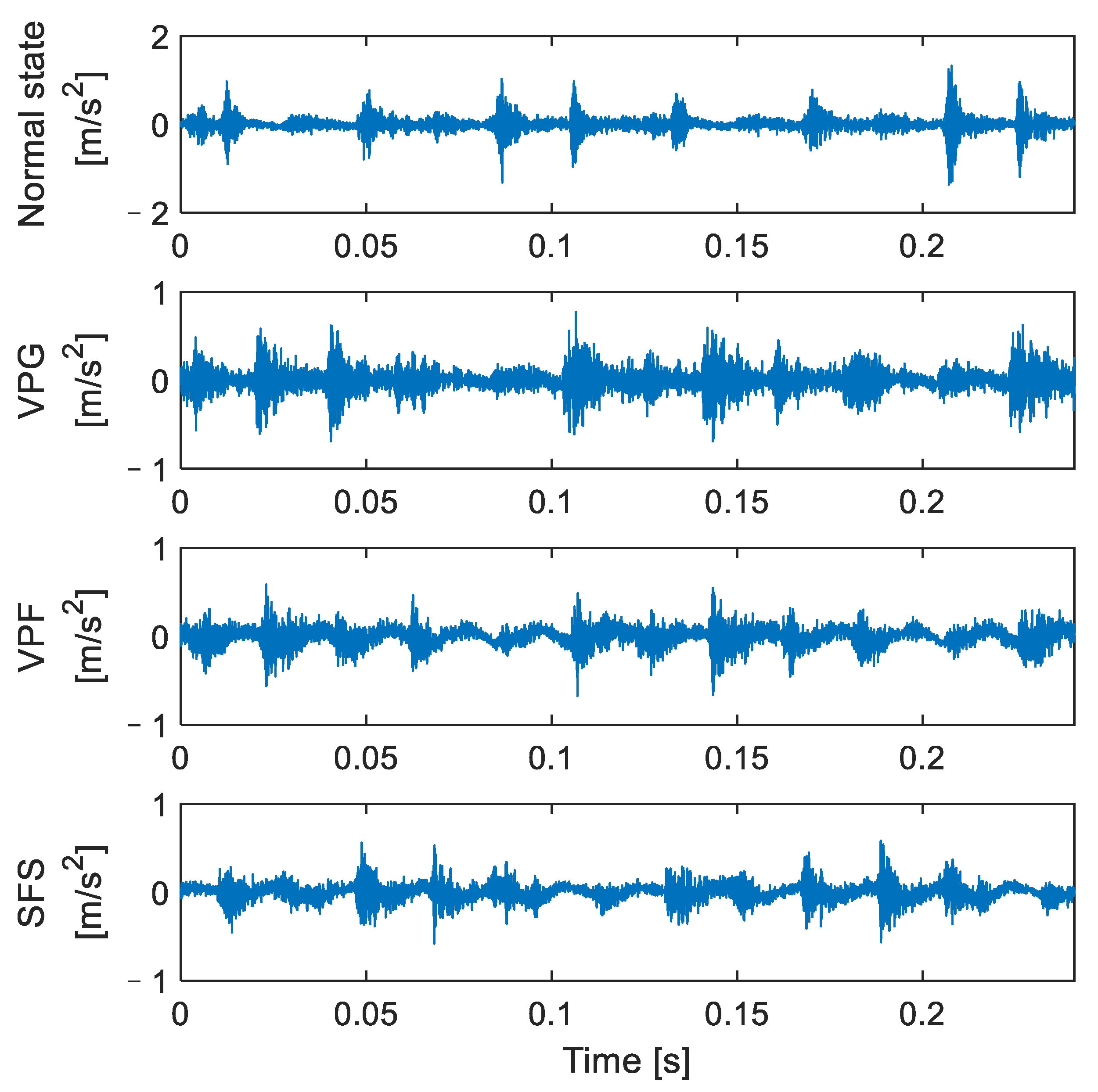
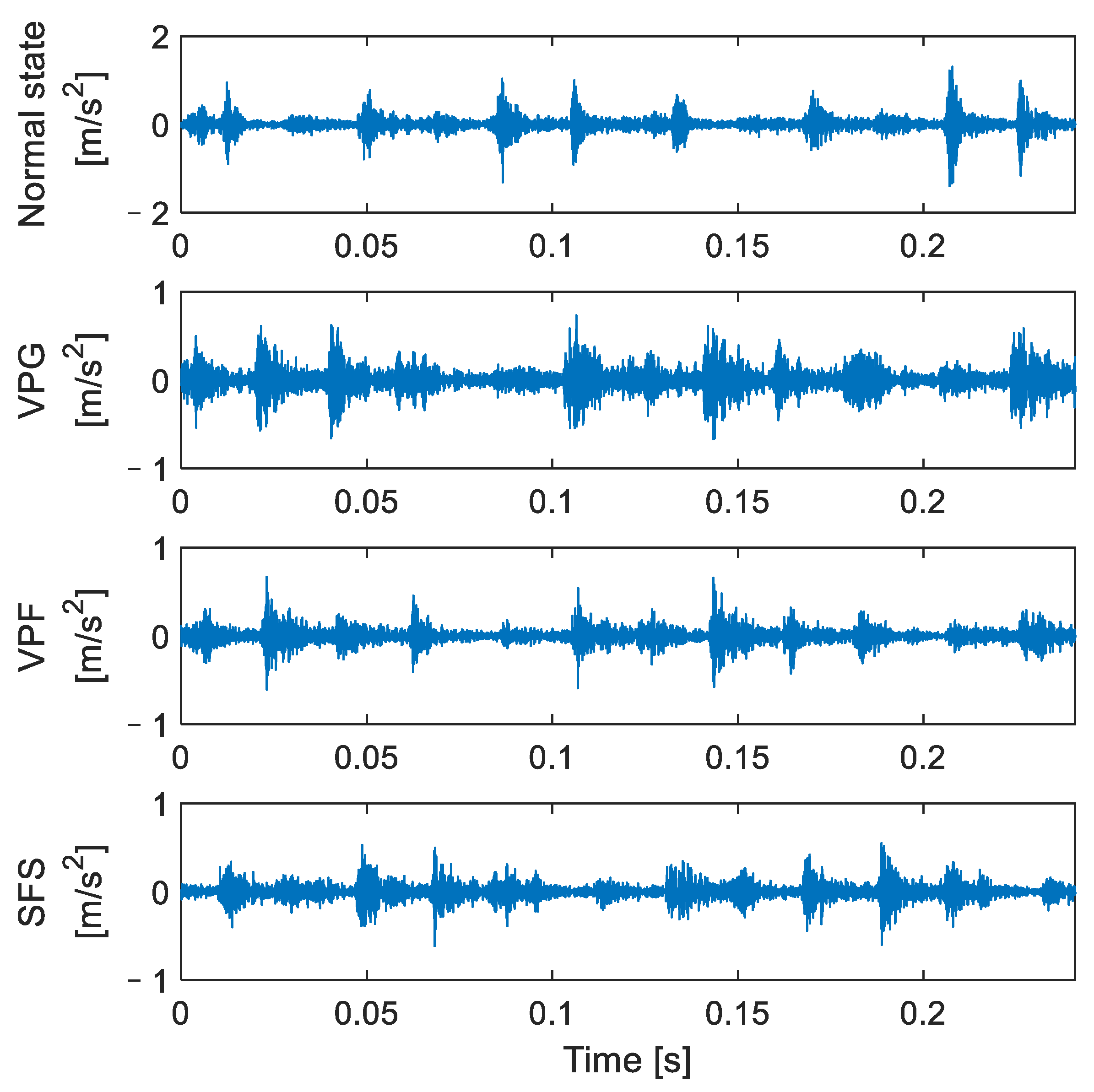
4.2. Experimental Data Analysis
4.3. Discussion and Recommendations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, H.; Wang, J.; Lee, J.; Li, Y. A Compound Interpolation Envelope Local Mean Decomposition and Its Application for Fault Diagnosis of Reciprocating Compressors. Mech. Syst. Signal Proc. 2018, 110, 273–295. [Google Scholar]
- Li, Y.; Wang, J.; Zhao, H.; Song, M.; Ou, L. Fault Diagnosis Method Based on Modified Multiscale Entropy and Global Distance Evaluation for the Valve Fault of a Reciprocating Compressor. Strojniski Vestn. J. Mech. Eng. 2019, 65, 123–135. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Chen, X.; Zhao, H.; Li, Y.; Liu, Z. Fault Feature Extraction for Reciprocating Compressors Based on Underdetermined Blind Source Separation. Entropy 2021, 23, 1217. [Google Scholar] [CrossRef] [PubMed]
- Zhou, S.; Xiao, M.; Bartos, P.; Filip, M.; Geng, G. Remaining Useful Life Prediction and Fault Diagnosis of Rolling Bearings Based on Short-Time Fourier Transform and Convolutional Neural Network. Shock Vib. 2020, 2020, 8857307. [Google Scholar] [CrossRef]
- Jiang, R.; Wei, M. An improved method of local mean decomposition with adaptive noise and its application to microseismic signal processing in rock engineering. Bull. Eng. Geol. Environ. 2021, 80, 6877–6895. [Google Scholar] [CrossRef]
- Yu, Z.; Nie, W.; Zhou, W.; Xu, F.; Yuan, S.; Leng, Y.; Yuan, Q. Epileptic seizure prediction based on local mean decomposition and deep convolutional neural network. J. Supercomput. 2020, 76, 3462–3476. [Google Scholar] [CrossRef]
- Wang, J.; Li, J.; Wang, H. Research on gearbox composite fault diagnosis based on improved local mean decomposition. Int. J. Dyn. Control 2021, 9, 1411–1422. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Q.; Wang, T.; Pei, J.; Zhang, S. Feature Extraction of EEG Signals Based on Local Mean Decomposition and Fuzzy Entropy. Int. J. Pattern Recognit. Artif. Intell. 2020, 34, 2058017. [Google Scholar] [CrossRef]
- Yue, S.; Wang, Y.; Wei, L.; Zhang, Z.; Wang, H. The joint empirical mode decomposition-local mean decomposition method and its application to time series of compressor stall process. Aerosp. Sci. Technol. 2020, 105, 105969. [Google Scholar] [CrossRef]
- Lu, T.; Yu, F.; Wang, J.; Wang, X.; Mudugamuwa, A.; Wang, Y.; Han, B. Application of adaptive complementary ensemble local mean decomposition in underwater acoustic signal processing. Appl. Acoust. 2021, 178, 107966. [Google Scholar] [CrossRef]
- Ngoc-Lan Huynh, A.; Deo, R.; Ali, M.; Abdulla, S.; Raj, N. Novel short-term solar radiation hybrid model: Long short-term memory network integrated with robust local mean decomposition. Appl. Energy 2021, 298, 117193. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, Y.; Dai, Q. Gear compound fault detection method based on improved multiscale permutation entropy and local mean decomposition. J. Vibroeng. 2021, 23, 1171–1183. [Google Scholar] [CrossRef]
- Ni, Q.; Ji, J.; Feng, K.; Halkon, B. A fault information-guided variational mode decomposition (FIVMD) method for rolling element bearings diagnosis. Mech. Syst. Signal Proc. 2022, 164, 108216. [Google Scholar] [CrossRef]
- Li, S.; Zhou, K.; Zhao, L.; Xu, Q.; Liu, J. An improved lithology identification approach based on representation enhancement by logging feature decomposition, selection and transformation. J. Pet. Sci. Eng. 2021, 209, 109842. [Google Scholar] [CrossRef]
- Levent, L. Correction to: The Performance Analysis of Robust Local Mean Mode Decomposition Method for Forecasting of Hydrological Time Series. Iran. J. Sci. Technol. Trans. Civ. Eng. 2022, 46, 3513–3515. [Google Scholar]
- Wang, Y.; Hu, K.; Lo, M. Uniform Phase Empirical Mode Decomposition: An Optimal Hybridization of Masking Signal and Ensemble Approaches. IEEE Access 2018, 6, 34819–34833. [Google Scholar] [CrossRef]
- Zheng, J.; Su, M.; Ying, W.; Tong, J.; Pan, Z. Improved uniform phase empirical mode decomposition and its application in machinery fault diagnosis. Measurement 2021, 179, 109425. [Google Scholar] [CrossRef]
- Ye, M.; Yan, X.; Jia, M. Rolling Bearing Fault Diagnosis Based on VMD-MPE and PSO-SVM. Entropy 2021, 23, 762. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, J.; He, Y.; Zhang, J. EEG emotion recognition using multichannel weighted multiscale permutation entropy. Appl. Intell. 2022, 52, 12064–12076. [Google Scholar] [CrossRef]
- Zhang, X.; Cao, L.; Chen, Y.; Jia, R.; Lu, X. Microseismic signal denoising by combining variational mode decomposition with permutation entropy. Appl. Geophys. 2022, 19, 65–80. [Google Scholar]
- Li, Z.; Cui, Y.; Li, L.; Chen, R.; Dong, L.; Du, J. Hierarchical Amplitude-Aware Permutation Entropy-Based Fault Feature Extraction Method for Rolling Bearings. Entropy 2022, 24, 310. [Google Scholar] [CrossRef] [PubMed]
- Long, Y.; Shi, X.; Chen, Q.; Xiao, Z.; Qin, Y.; Lv, J. Early Fault Diagnosis Technology for Bearings Based on Quantile Multiscale Permutation Entropy. Math. Probl. Eng. 2021, 2021, 7718074. [Google Scholar] [CrossRef]
- Zheng, X.; Zhou, G.; Li, D.; Zhou, R.; Ren, H. Application of Variational Mode Decomposition and Permutation Entropy for Rolling Bearing Fault Diagnosis. Int. J. Acoust. Vib. 2019, 24, 303–311. [Google Scholar] [CrossRef]
- Ying, W.; Tong, J.; Dong, Z.; Pan, H.; Liu, Q.; Zheng, J. Composite Multivariate Multi-Scale Permutation Entropy and Laplacian Score Based Fault Diagnosis of Rolling Bearing. Entropy 2022, 24, 160. [Google Scholar] [CrossRef]
- Li, Y.; Gao, Q.; Li, P.; Liu, J.; Zhu, Y. Fault diagnosis of rolling bearing using a refined composite multiscale weighted permutation entropy. J. Mech. Sci. Technol. 2021, 35, 1893–1907. [Google Scholar] [CrossRef]
- Zhao, C.; Sun, J.; Lin, S.; Peng, Y. Rolling mill bearings fault diagnosis based on improved multivariate variational mode decomposition and multivariate composite multiscale weighted permutation entropy. Measurement 2022, 195, 111190. [Google Scholar] [CrossRef]
- Zhou, S.; Qian, S.; Chang, W.; Xiao, Y.; Cheng, Y. A Novel Bearing Multi-Fault Diagnosis Approach Based on Weighted Permutation Entropy and an Improved SVM Ensemble Classifier. Sensors 2018, 18, 1934. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bai, D.; Yao, W.; Wang, S.; Wang, J. Multiscale Weighted Permutation Entropy Analysis of Schizophrenia Magnetoencephalograms. Entropy 2022, 24, 314. [Google Scholar] [CrossRef] [PubMed]
- Wu, P.; Guo, L.; Duan, Y.; Zhou, W.; He, G. Control loop performance monitoring based on weighted permutation entropy and control charts. Can. J. Chem. Eng. 2019, 97, 1488–1495. [Google Scholar] [CrossRef]
- Niu, H.; Wang, J.; Liu, C. Analysis of crude oil markets with improved multiscale weighted permutation entropy. Physica A 2018, 494, 389–402. [Google Scholar] [CrossRef]
- Gan, X.; Lu, H.; Yang, G.; Liu, J. Rolling Bearing Diagnosis Based on Composite Multiscale Weighted Permutation Entropy. Entropy 2018, 20, 821. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, Q.; Wang, J. A Wavelet Based Multiscale Weighted Permutation Entropy Method for Sensor Fault Feature Extraction and Identification. J. Sens. 2016, 2016, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Minhas, A.; Kankar, P.; Kumar, N.; Singh, S. Bearing fault detection and recognition methodology based on weighted multiscale entropy approach. Mech. Syst. Signal Proc. 2021, 147, 107073. [Google Scholar] [CrossRef]
- Zhang, Y.; Shang, P. Refined composite multiscale weighted-permutation entropy of financial time series. Physica A 2018, 496, 189–199. [Google Scholar] [CrossRef]
- Wang, J.; Chen, X.; Zhao, H.; Li, Y.; Yu, D. An Effective Two- Stage Clustering Method for Mixing Matrix Estimation in Instantaneous Underdetermined Blind Source Separation and Its Application in Fault Diagnosis. IEEE Access 2021, 9, 1. [Google Scholar] [CrossRef]
- Zheng, J.; Dong, Z.; Pan, H.; Ni, Q.; Liu, T.; Zhang, J. Composite multi-scale weighted permutation entropy and extreme learning machine based intelligent fault diagnosis for rolling bearing. Measurement 2019, 143, 69–80. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Valve States | The Kurtosis Values of Each PF Component | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PF1 | PF2 | PF3 | PF4 | PF5 | PF6 | PF7 | PF8 | PF9 | PF10 | PF11 | PF12 | PF13 | |
| Normal state | 25.43 | 20.03 | 6.45 | 7.49 | 6.69 | 4.46 | 2.77 | 3.24 | 2.02 | 2.74 | 3.69 | 2.48 | 1.84 |
| VPG | 12.65 | 6.33 | 6.07 | 4.95 | 6.06 | 8.25 | 2.60 | 2.74 | 1.99 | 1.91 | 6.99 | 4.41 | 1.53 |
| VPF | 22.50 | 8.66 | 4.79 | 6.24 | 8.30 | 4.61 | 2.91 | 4.36 | 1.57 | 1.61 | 8.23 | 3.53 | 1.91 |
| SFS | 11.70 | 7.65 | 6.14 | 6.88 | 9.13 | 9.61 | 3.88 | 2.59 | 1.63 | 2.50 | 6.27 | 2.77 | 2.11 |
| Feature Extraction Method | Identification Accuracy (%) of Valve State | Total Accuracy (%) | |||
|---|---|---|---|---|---|
| Normal State | VPG | VPF | SFS | ||
| AUPLMD–RTSMWPE | 95 | 90 | 95 | 97.5 | 94.375 |
| AUPLMD–MWPE | 90 | 87.5 | 90 | 90 | 89.375 |
| LMD–RTSMWPE | 92.5 | 90 | 92.5 | 92.5 | 91.875 |
| LMD–MWPE | 87.5 | 87.5 | 85 | 90 | 87.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, M.; Wang, J.; Zhao, H.; Wang, X. Fault Diagnosis Method Based on AUPLMD and RTSMWPE for a Reciprocating Compressor Valve. Entropy 2022, 24, 1480. https://doi.org/10.3390/e24101480
Song M, Wang J, Zhao H, Wang X. Fault Diagnosis Method Based on AUPLMD and RTSMWPE for a Reciprocating Compressor Valve. Entropy. 2022; 24(10):1480. https://doi.org/10.3390/e24101480
Chicago/Turabian StyleSong, Meiping, Jindong Wang, Haiyang Zhao, and Xulei Wang. 2022. "Fault Diagnosis Method Based on AUPLMD and RTSMWPE for a Reciprocating Compressor Valve" Entropy 24, no. 10: 1480. https://doi.org/10.3390/e24101480