
A Data-Driven Space-Time-Parameter Reduced-Order Model with Manifold Learning for Coupled Problems: Application to Deformable Capsules Flowing in Microchannels

 , , , and
, , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Material and Methods
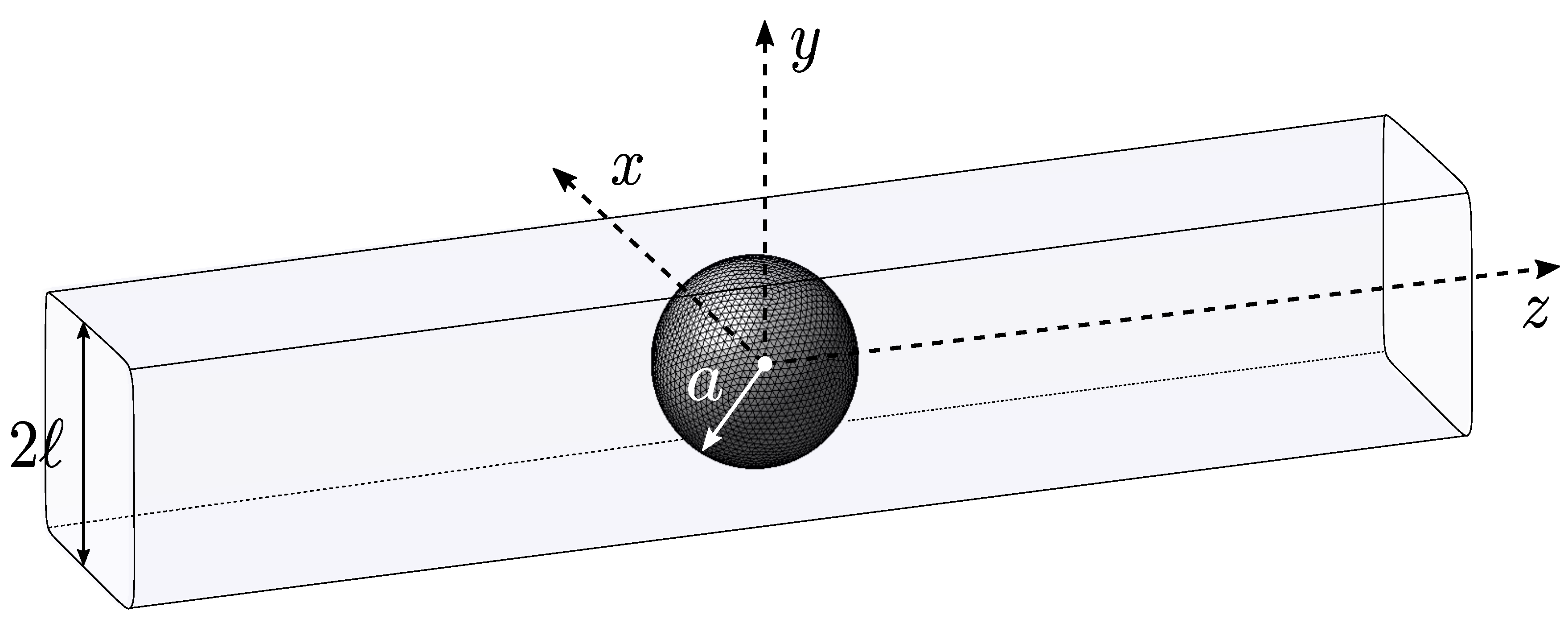
2.1. Problem Statement
- The confinement ratio , ratio of the capsule to tube sizes;
- The capillary number , ratio of the viscous forces onto the capsule membrane to the membrane elastic forces.
- The flow perturbation induced by the capsule vanishes at and :where is the Poiseuille flow velocity of the suspending fluid in the absence of capsule. For a square channel we have the expression in expansion form
- Uniform pressure at and :where is the undisturbed suspending pressure drop in the absence of capsule and is the additional pressure drop due to the capsule.
- No slip boundary conditions on the channel wall W:
- No slip boundary conditions on the capsule membrane C:where is the membrane velocity at position at time t, and is the reference position vector of the capsule membrane.
- The normal loading continuity indicates that the load on the membrane is due to the viscous traction jumpwhere is the outward unit normal vector.
2.2. Discrete Full Order Model (FOM)
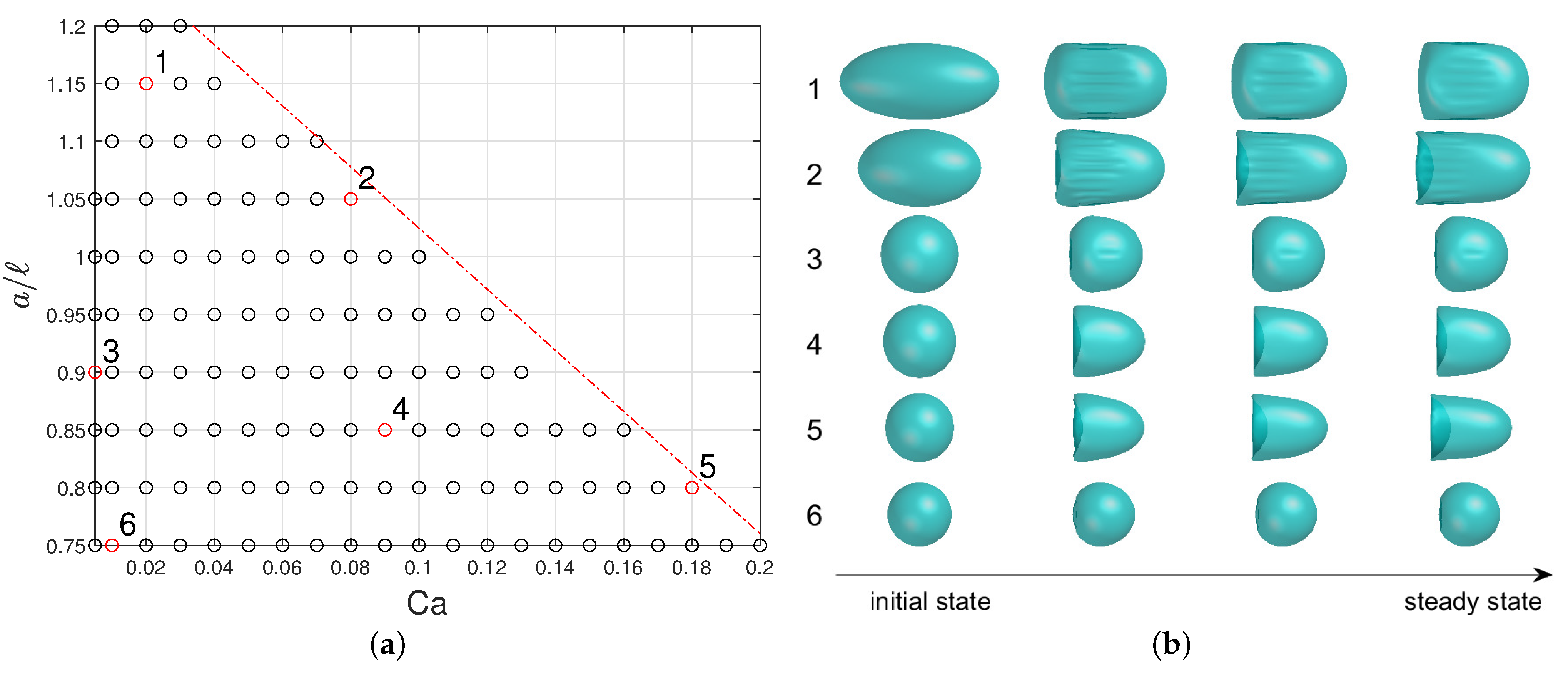
2.3. Design of Experiment, Database of FOM Results
3. Reduced Order Model (ROM)
3.1. Overview
- Offline stage. We reduce the data dimensionality by means of a double POD basis for space and parameter variables. The displacement field is represented aswhere are the spatial POD modes, the parameter modes and scalar coefficients depending on time t. The truncation ranks are and , respectively (the ‘x’ superscript stands for ‘space’ and the ‘c’ superscript for ‘configuration’). We use a similar representation for the velocity field:The determination of the double POD basis is achieved by singular value decomposition (SVD) from the datacube with different rearrangements of the data in stacked matrix form. The truncation ranks , , , are expected to be rather small while ensuring accuracy of the representations.
- Online stage. For any query parameter in the parameter domain:
- (a)
- (b)
- From the estimated displacement field computed at different instants , compute a low-order reduced basis , by singular value decomposition. We then get the low-order representations of both displacements and velocities:
- (c)
- Manifold learning online stage: using diffuse approximation, we determine the low-order manifold that links displacements and velocities in the (reduced-order) state space:
- (d)
- Derivation of a low-order dynamical system: we then derive a lightweight differential-algebraic dynamical system, easy to solve numerically: for , solve
3.2. Offline Stage
3.2.1. Global Parametric Reduced Basis (GPRB)
3.2.2. Global Spatial Reduced Basis (GSRB)
3.3. Data Dimensionality Reduction
| Algorithm 1 Offline phase |
| Require: database of for , truncations , number of snapshots . |
| for do |
| if then |
| ; ; |
| else |
| ; ; |
| end if |
| end for |
| for do |
| if ) then |
| ; ; |
| else |
| ; ; |
| end if |
| end for |
| SVD(), SVD(), for ; |
| for do |
| ; |
| ; |
| end for |
3.4. Online Stage: Search for an Approximate Solution at a Query Configuration
3.4.1. First Estimation of the Solutions at
3.4.2. Construction of a Low-Order Reduced Basis Suitable for , Data Generation
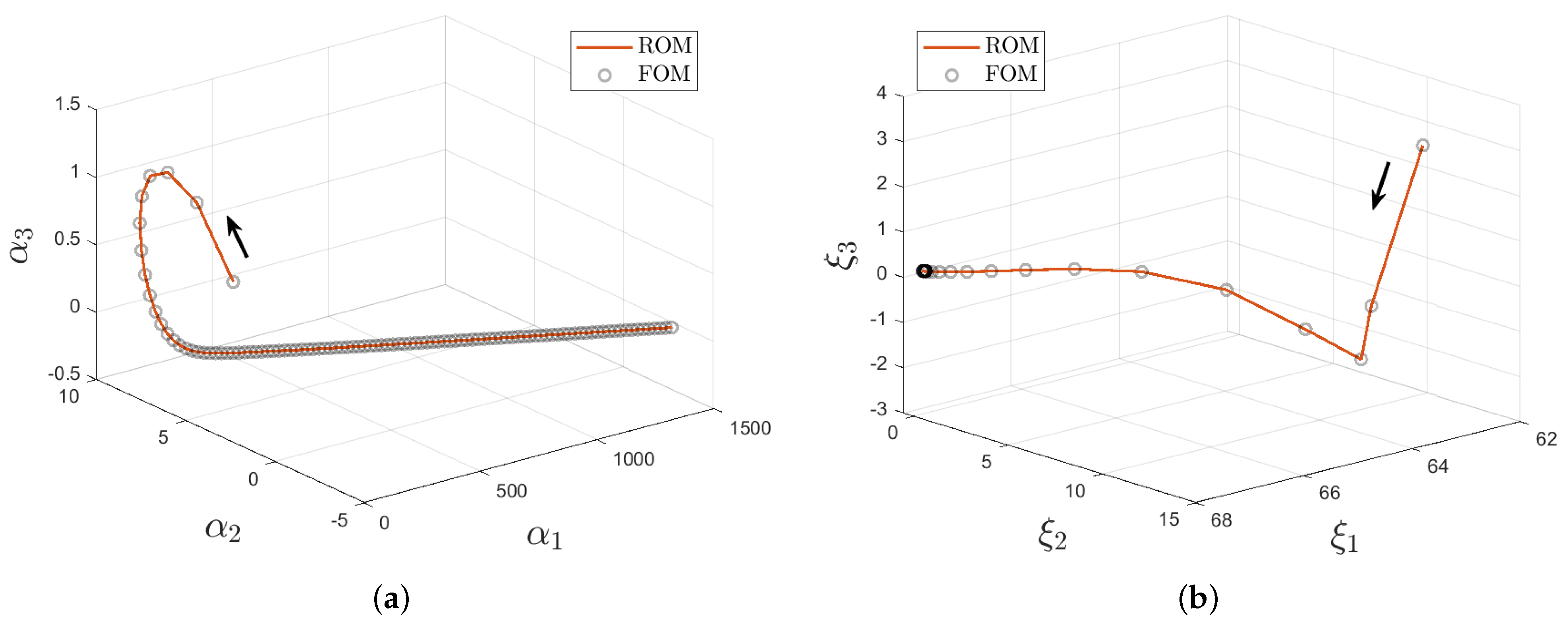
3.4.3. Toward a Physically Consistent Dynamical Reduced-Order Model
3.4.4. Manifold Learning
3.4.5. Low-Order Dynamical Reduced Order Model
| Algorithm 2 Online phase |
| Require: choose a query parameter , choose a time step . |
| Initialization: , , ; |
| Compute and from the diffuse approximation approach; |
| for do |
| ; |
| ; |
| end for |
| ; |
| ; |
| Compute , , , and , ; |
| while do |
| ; ; |
| ; |
| Compute , from the diffuse approximation approach; |
| ; |
| If needed, reconstruct the high-dimensional displacements/velocity fields: |
| ; |
| ; |
| end while |
4. Numerical Experiments
4.1. Study Case
4.2. FOM Result Database Generation
Clustering Strategy
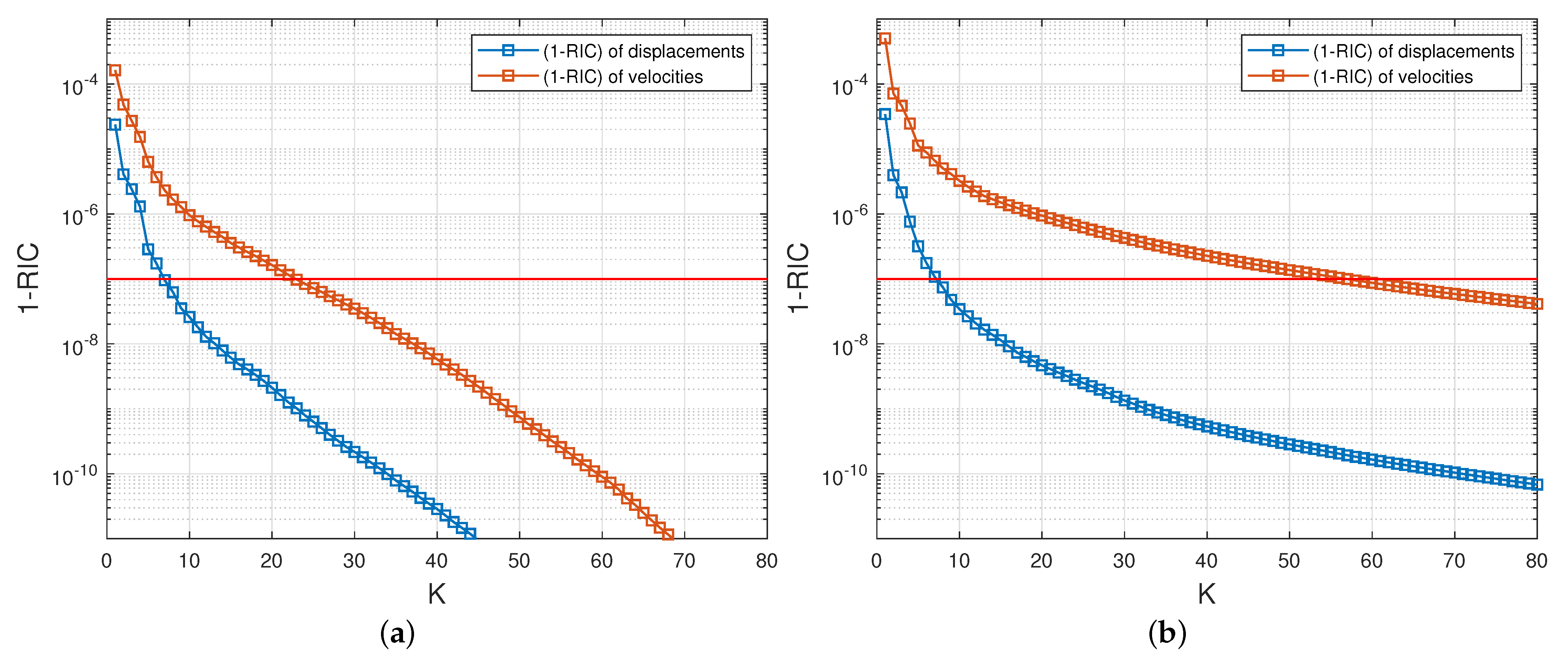
4.3. Elements of Analysis—Accuracy Criteria
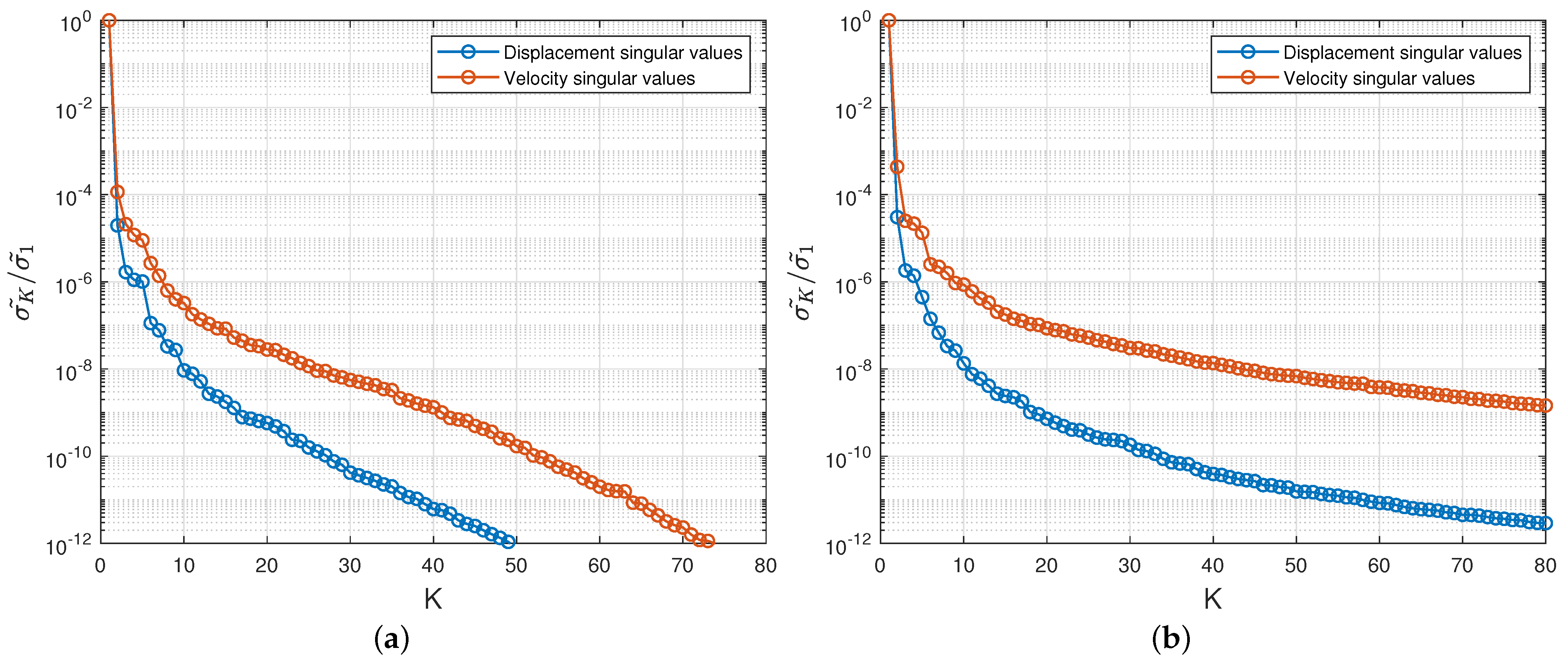
4.4. Dimensionality Reduction Analysis
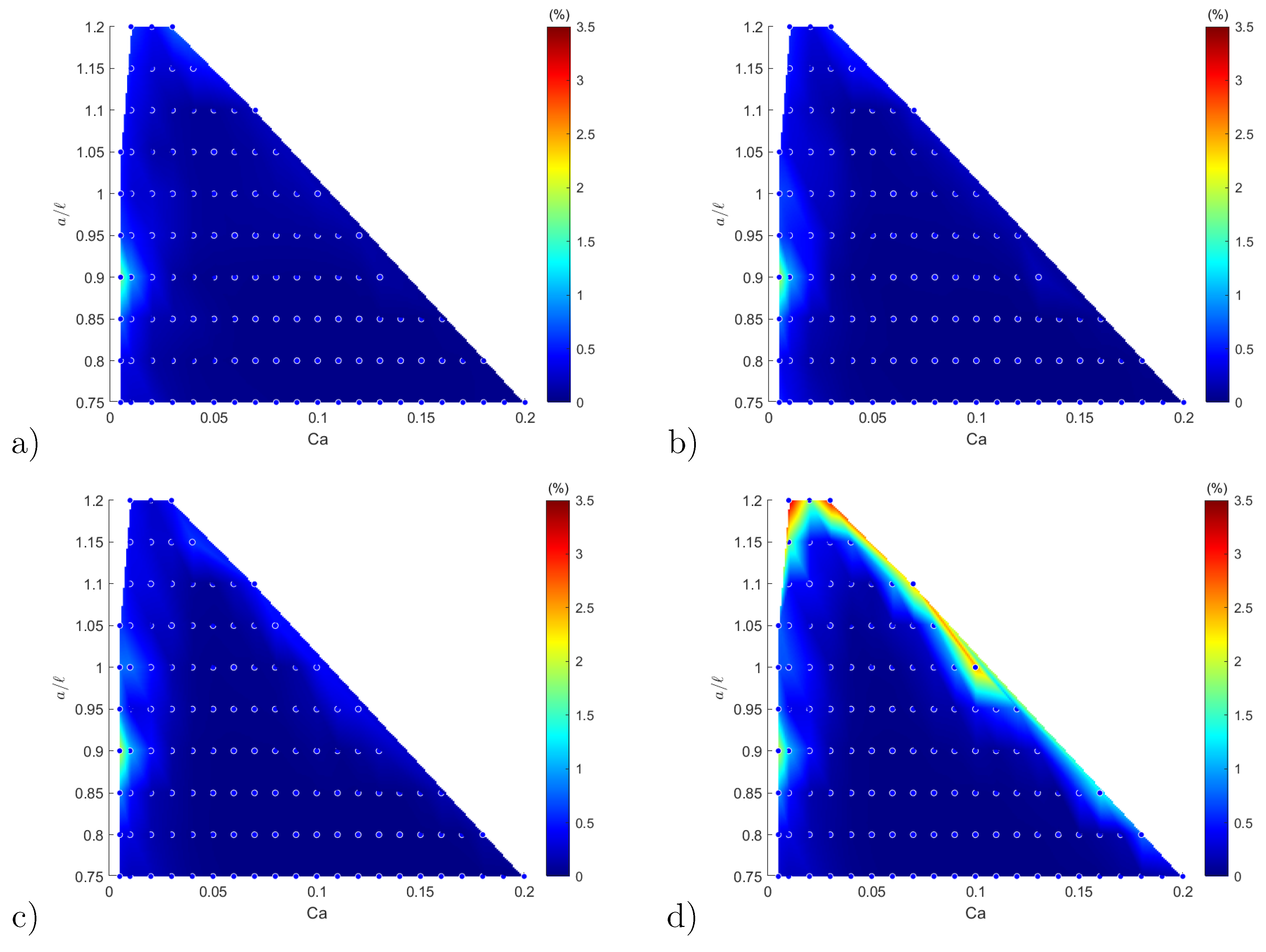
4.5. ROM Accuracy Analysis
- -
- For global POD modes: , , , ;
- -
- -
- For local POD modes: , ;
- -
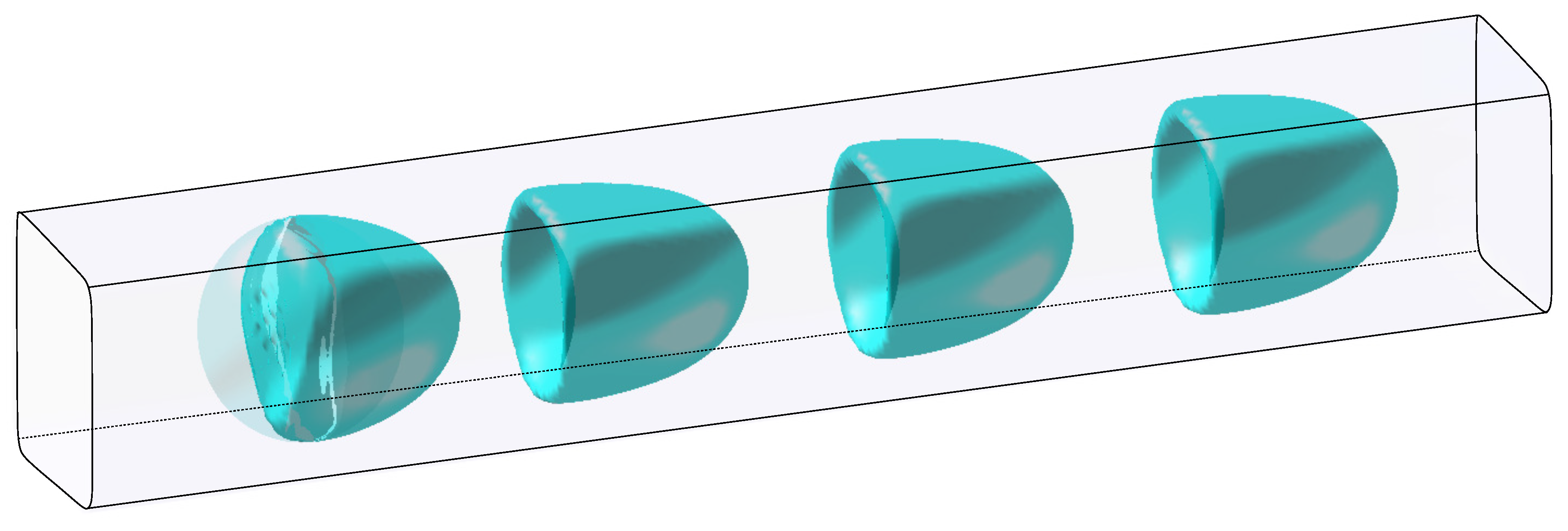
4.6. CapsuleExplorer: Capsule Visualization/Exploration Software
5. Concluding Remarks
Author Contributions
Funding
Conflicts of Interest
References
- Williams, R.J.; Zipser, D. A learning algorithm for continually running fully Recurrent Neural Networks. Neural Comput. 1989, 1, 270–280. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Peherstorfer, B.; Willcox, K. Dynamic data-driven reduced-order models. Comput. Methods Appl. Mech. Eng. 2015, 291, 21–41. [Google Scholar] [CrossRef]
- Peherstorfer, B.; Willcox, K. Data-driven operator inference for nonintrusive projection-based model reduction. Comput. Methods Appl. Mech. Eng. 2016, 306, 196–215. [Google Scholar] [CrossRef] [Green Version]
- Pawar, S.; Rahman, S.M.; Vaddireddy, H.; San, O.; Rasheed, A.; Vedula, P. A deep learning enabler for nonintrusive reduced order modeling of fluid flows. Phys. Fluids 2019, 31, 085101. [Google Scholar] [CrossRef] [Green Version]
- Xiao, D.; Fang, F.; Pain, C.; Navon, I. A parameterized non-intrusive reduced order model and error analysis for general time-dependent nonlinear partial differential equations and its applications. Comput. Methods Appl. Mech. Eng. 2017, 317, 868–889. [Google Scholar] [CrossRef] [Green Version]
- Cordier, L. Proper Orthogonal Decomposition: An overview. In Lecture Series 2008-01 on Post-Processing of Experimental and Numerical Data; Von Karman Institute for Fluid Dynamics: Sint-Genesius-Rode, Belgium, 2008. [Google Scholar]
- Benner, P.; Gugercin, S.; Willcox, K. A Survey of Projection-Based Model Reduction Methods for Parametric Dynamical Systems. SIAM Rev. 2015, 57, 483–531. [Google Scholar] [CrossRef]
- Silva, D.F.; Alvaro, L.C. Practical implementation aspects of Galerkin reduced order models based on Proper Orthogonal Decomposition for Computational Fluid Dynamics. J. Bras. Soc. Mech. Sci. Eng. 2015, 37, 1309–1327. [Google Scholar] [CrossRef]
- Gallivan, K.; Vandendorpe, A.; Van Dooren, P. Model Reduction of MIMO Systems via Tangential Interpolation. SIAM J. Matrix Anal. Appl. 2004, 26, 328–349. [Google Scholar] [CrossRef] [Green Version]
- Chinesta, F.; Ladeveze, P.; Cueto, E. A short review on model order reduction based on Proper Generalized Decomposition. Arch. Comput. Methods Eng. 2011, 18, 395. [Google Scholar] [CrossRef] [Green Version]
- Chinesta, F.; Ammar, A.; Cueto, E. On the Use of Proper Generalized Decompositions for Solving the Multidimensional Chemical Master Equation. Rev. Européenne Mécanique Numérique/Eur. J. Comput. Mech. 2010, 19, 53–64. [Google Scholar] [CrossRef] [Green Version]
- Ghnatios, C.; Masson, F.; Huerta, A.; Leygue, A.; Cueto, E.; Chinesta, F. Proper Generalized Decomposition based dynamic data-driven control of thermal processes. Comput. Methods Appl. Mech. Eng. 2012, 213–216, 29–41. [Google Scholar] [CrossRef] [Green Version]
- Barrault, M.; Maday, Y.; Nguyen, N.C.; Patera, A.T. An ‘empirical interpolation’ method: Application to efficient reduced-basis discretization of partial differential equations. Comptes Rendus Math. 2004, 339, 667–672. [Google Scholar] [CrossRef]
- Chaturantabut, S.; Sorensen, D. Nonlinear model reduction via discrete empirical interpolation. SIAM J. Sci. Comp. 2010, 32, 2737–2764. [Google Scholar] [CrossRef]
- Xiao, D.; Fang, F.; Buchan, A.; Pain, C.; Navon, O.; Du, J.; Hu, G. Non-linear model reduction for the Navier-Stokes equations using residual DEIM method. J. Comp. Phys. 2014, 263, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Lappano, E.; Naets, F.; Desmet, W.; Mundo, D.; Nijman, E. A greedy sampling approach for the projection basis construction in parametric model order reduction for structural dynamics models. In Proceedings of the 27th International Conference on Noise and Vibration Engineering, Leuven, Belgium, 19–21 September 2016; pp. 3563–3571. [Google Scholar]
- Breitkopf, P.; Rassineux, A.; Villon, P. An Introduction to Moving Least Squares Meshfree Methods. Rev. Européenne Eléments Finis 2002, 11, 825–867. [Google Scholar] [CrossRef]
- Amsallem, D.; Cortial, J.; Farhat, C. Toward real-time computational-fluid-dynamics-based aeroelastic computations using a database of reduced-order information. AIAA J. 2010, 48, 2029–2037. [Google Scholar] [CrossRef]
- Audouze, C.; De Vuyst, F.; Nair, P.B. Reduced-order modeling of parameterized PDEs using time–space-parameter principal component analysis. Int. J. Numer. Methods Eng. 2009, 80, 1025–1057. [Google Scholar] [CrossRef]
- Del Burgo, L.S.; Compte, M.; Aceves, M.; Hernández, R.M.; Sanz, L.; Álvarez-Vallina, L.; Pedraz, J.L. Microencapsulation of therapeutic bispecific antibodies producing cells: Immunotherapeutic organoids for cancer management. J. Drug Target. 2015, 23, 170–179. [Google Scholar] [CrossRef]
- Rabanel, J.M.; Banquy, X.; Zouaoui, H.; Mokhtar, M.; Hildgen, P. Progress technology in microencapsulation methods for cell therapy. Biotechnol. Prog. 2009, 25, 946–963. [Google Scholar] [CrossRef]
- Chu, T.; Salsac, A.V.; Leclerc, E.; Barthès-Biesel, D.; Wurtz, H.; Edwards-Lévy, F. Comparison between measurements of elasticity and free amino group content of ovalbumin microcapsule membranes: Discrimination of the cross-linking degree. J. Colloid Interface Sci. 2011, 355, 81–88. [Google Scholar] [CrossRef]
- Hu, X.Q.; Sévénié, B.; Salsac, A.V.; Leclerc, E.; Barthès-Biesel, D. Characterizing the membrane properties of capsules flowing in a square-section microfluidic channel: Effects of the membrane constitutive law. Phys. Rev. E 2013, 87, 063008. [Google Scholar] [CrossRef] [Green Version]
- de Loubens, C.; Deschamps, J.; Georgelin, M.; Charrier, A.; Edwards-Lévy, F.; Leonetti, M. Mechanical characterization of cross-linked serum albumin microcapsules. Soft Matter 2014, 10, 4561–4568. [Google Scholar] [CrossRef] [PubMed]
- Sévénié, B.; Salsac, A.V.; Barthès-Biesel, D. Characterization of Capsule Membrane Properties using a Microfluidic Photolithographied Channel: Consequences of Tube Non-squareness. Procedia IUTAM 2015, 16, 106–114. [Google Scholar] [CrossRef] [Green Version]
- Gubspun, J.; Gires, P.Y.; Loubens, C.d.; Barthès-Biesel, D.; Deschamps, J.; Georgelin, M.; Leonetti, M.; Leclerc, E.; Edwards-Lévy, F.; Salsac, A.V. Characterization of the mechanical properties of cross-linked serum albumin microcapsules: Effect of size and protein concentration. Colloid Polym. Sci. 2016, 294, 1381–1389. [Google Scholar] [CrossRef]
- De Loubens, C.; Deschamps, J.; Edwards-Lévy, F.; Leonetti, M.; Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Fluid Mech. 2016, 378, 686–707. [Google Scholar]
- Quesada, C.; Dupont, C.; Villon, P.; Salsac, A.V. Diffuse approximation for identification of the mechanical properties of microcapsules. Math. Mech. Solids 2021, 26, 1018–1028. [Google Scholar] [CrossRef]
- Wang, Z.; Sui, Y.; Salsac, A.V.; Barthès-Biesel, D.; Wang, W. Motion of a spherical capsule in branched tube flow with finite inertia. J. Fluid Mech. 2016, 806, 603–626. [Google Scholar] [CrossRef] [Green Version]
- Vesperini, D.; Chaput, O.; Munier, N.; Maire, P.; Edwards-Lévy, F.; Salsac, A.V.; Le Goff, A. Deformability- and size-based microcapsule sorting. Med. Eng. Phys. 2017, 48, 68–74. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Sui, Y.; Salsac, A.V.; Barthès-Biesel, D.; Wang, W. Path selection of a spherical capsule in a microfluidic branched channel: Towards the design of an enrichment device. J. Fluid Mech. 2018, 849, 136–162. [Google Scholar] [CrossRef] [Green Version]
- Kabacaoğlu, G.; Biros, G. Sorting same-size red blood cells in deep deterministic lateral displacement devices. J. Fluid Mech. 2019, 859, 433–475. [Google Scholar] [CrossRef] [Green Version]
- Häner, E.; Vesperini, D.; Salsac, A.V.; Le Goff, A.; Juel, A. Sorting of capsules according to their stiffness: From principle to application. Soft Matter 2021, 17, 3722–3732. [Google Scholar] [CrossRef]
- Quesada, C.; Villon, P.; Salsac, A.V. Real-time prediction of the deformation of microcapsules using Proper Orthogonal Decomposition. J. Fluids Struct. 2021, 101, 103193. [Google Scholar] [CrossRef]
- Savignat, J.M. Approximation Diffuse Hermite et Ses Applications. Ph.D. Thesis, École Nationale Supérieure des Mines de Paris, Paris, France, 2000. [Google Scholar]
- Raghavan, B.; Breitkopf, P.; Tourbier, Y.; Villon, P. Towards a space reduction approach for efficient structural shape optimization. Struct. Multidiscip. Optim. 2013, 48, 987–1000. [Google Scholar] [CrossRef]
- Hu, X.Q.; Salsac, A.V.; Barthès-Biesel, D. Flow of a spherical capsule in a pore with circular or square cross-section. J. Fluid Mech. 2012, 705, 176–194. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Merlo, A.; Dupont, D.; Salsac, A.V.; Barthès-Biesel, D. Characterization of the mechanical properties of microcapsules with a reticulated membrane: Comparison of microfluidic and microrheometric approaches. Flow 2021, in press. [Google Scholar]
- Walter, J.; Salsac, A.V.; Barthès-Biesel, D.; Le Tallec, P. Coupling of finite element and boundary integral methods for a capsule in a Stokes flow: Numerical Methods for A Capsule in A Stokes Flow. Int. J. Numer. Methods Eng. 2010, 83, 829–850. [Google Scholar] [CrossRef]
- Barthès-Biesel, D. Modeling the motion of capsules in flow. Curr. Opin. Colloid Interface Sci. 2011, 16, 3–12. [Google Scholar] [CrossRef]
- Golub, G.H.; Reinsch, C. Singular value decomposition and least squares solutions. In Linear Algebra; Bauer, F.L., Ed.; Springer: Berlin/Heidelberg, Germany, 1971; pp. 134–151. [Google Scholar]
- Buhmann, M.D. Radial Basis Functions; Cambridge Monographs on Applied and Computational Mathematics; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Dubuisson, M.P.; Jain, A. A modified Hausdorff distance for object matching. In Proceedings of the 12th International Conference on Pattern Recognition, Jerusalem, Israel, 9–13 October 1994; Volume 1, pp. 566–568. [Google Scholar]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boubehziz, T.; Quesada-Granja, C.; Dupont, C.; Villon, P.; De Vuyst, F.; Salsac, A.-V. A Data-Driven Space-Time-Parameter Reduced-Order Model with Manifold Learning for Coupled Problems: Application to Deformable Capsules Flowing in Microchannels. Entropy 2021, 23, 1193. https://doi.org/10.3390/e23091193
Boubehziz T, Quesada-Granja C, Dupont C, Villon P, De Vuyst F, Salsac A-V. A Data-Driven Space-Time-Parameter Reduced-Order Model with Manifold Learning for Coupled Problems: Application to Deformable Capsules Flowing in Microchannels. Entropy. 2021; 23(9):1193. https://doi.org/10.3390/e23091193
Chicago/Turabian StyleBoubehziz, Toufik, Carlos Quesada-Granja, Claire Dupont, Pierre Villon, Florian De Vuyst, and Anne-Virginie Salsac. 2021. "A Data-Driven Space-Time-Parameter Reduced-Order Model with Manifold Learning for Coupled Problems: Application to Deformable Capsules Flowing in Microchannels" Entropy 23, no. 9: 1193. https://doi.org/10.3390/e23091193