
Gearbox Failure Diagnosis Using a Multisensor Data-Fusion Machine-Learning-Based Approach




Abstract
:1. Introduction
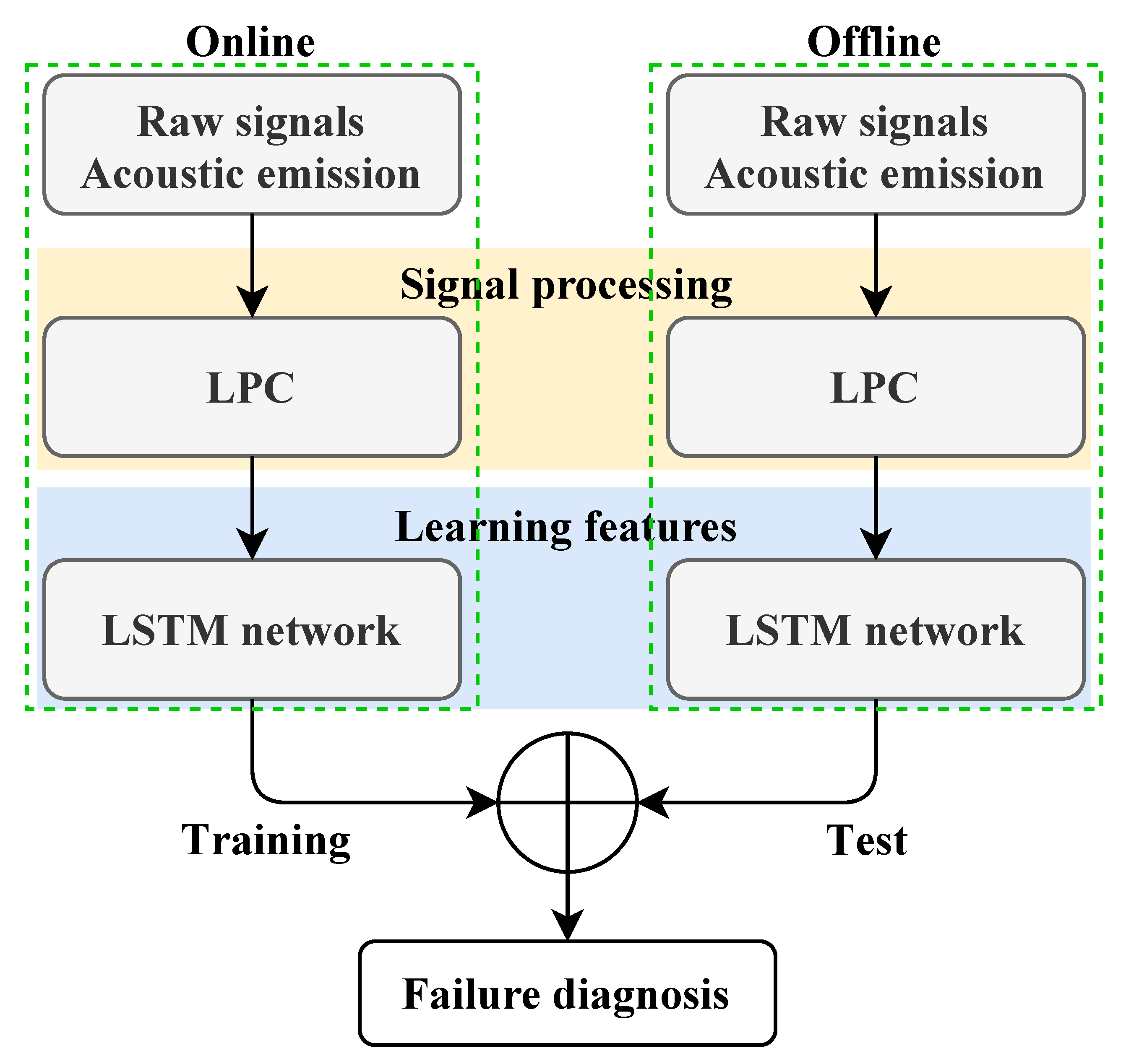
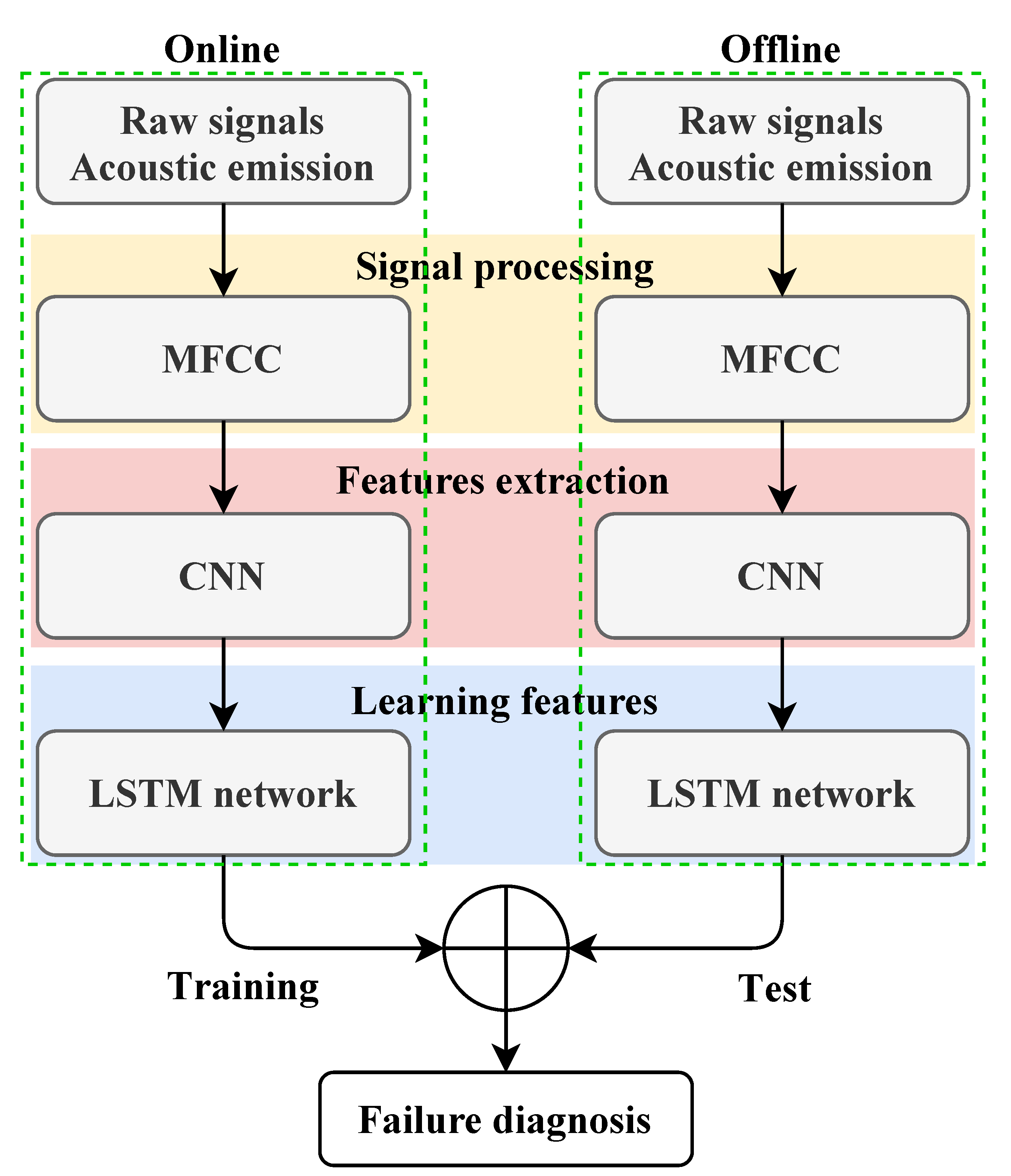
- comparative study between two methodologies for gearbox diagnosis based on LPC-LSTM and MFCC-CNN-LSTM. This study highlights key features of technique suitability in an industrial context, particularly Industry 4.0;
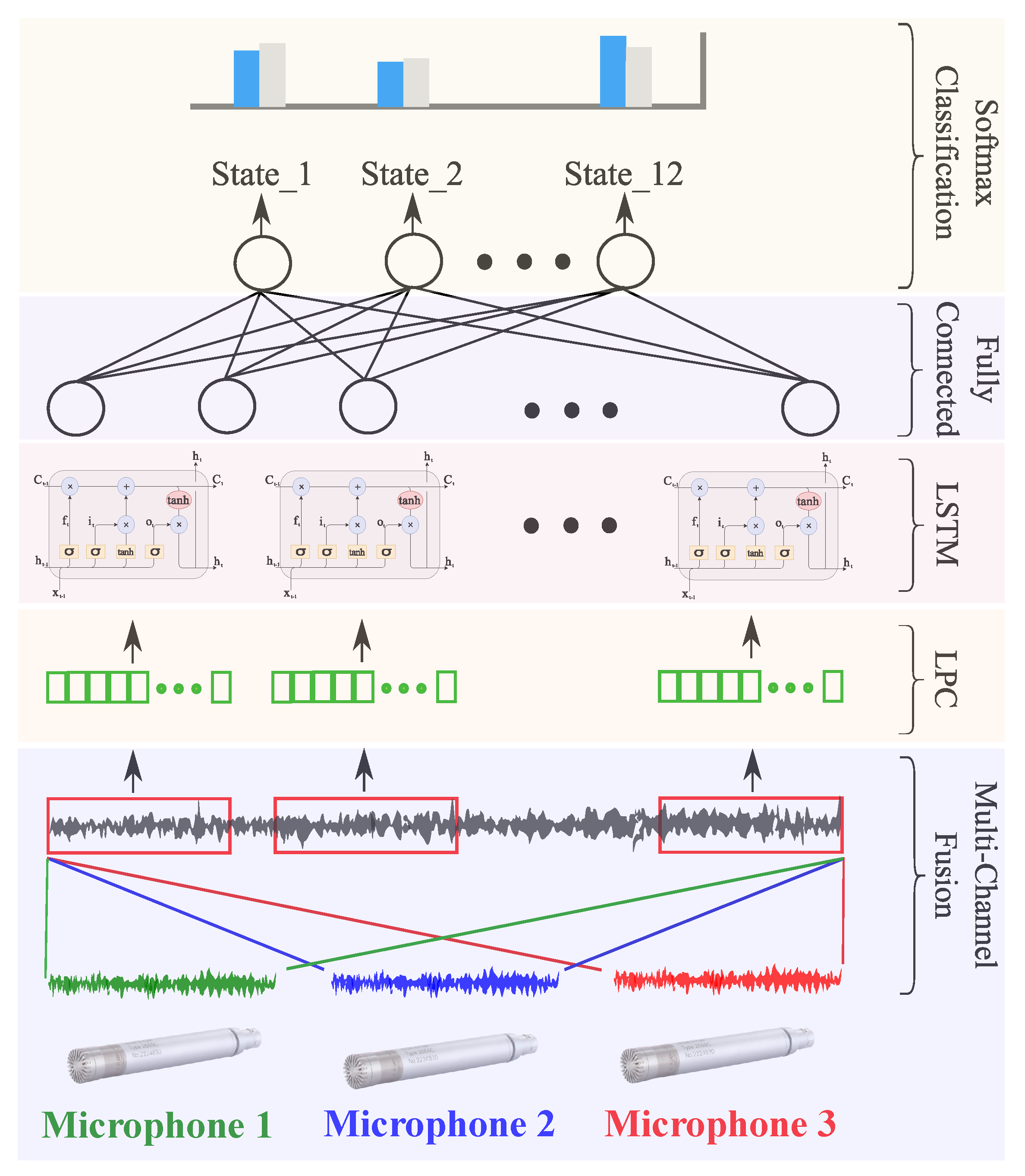
- the use of multisensor data fusion (early fusion) to improve diagnostic reliability of the above-considered methodologies. In this context, the proposed early fusion-based fault diagnosis methodology clearly decreases training time and the data amount for storage, and improves accuracy.
2. Proposed Failure-Diagnosis Methodologies
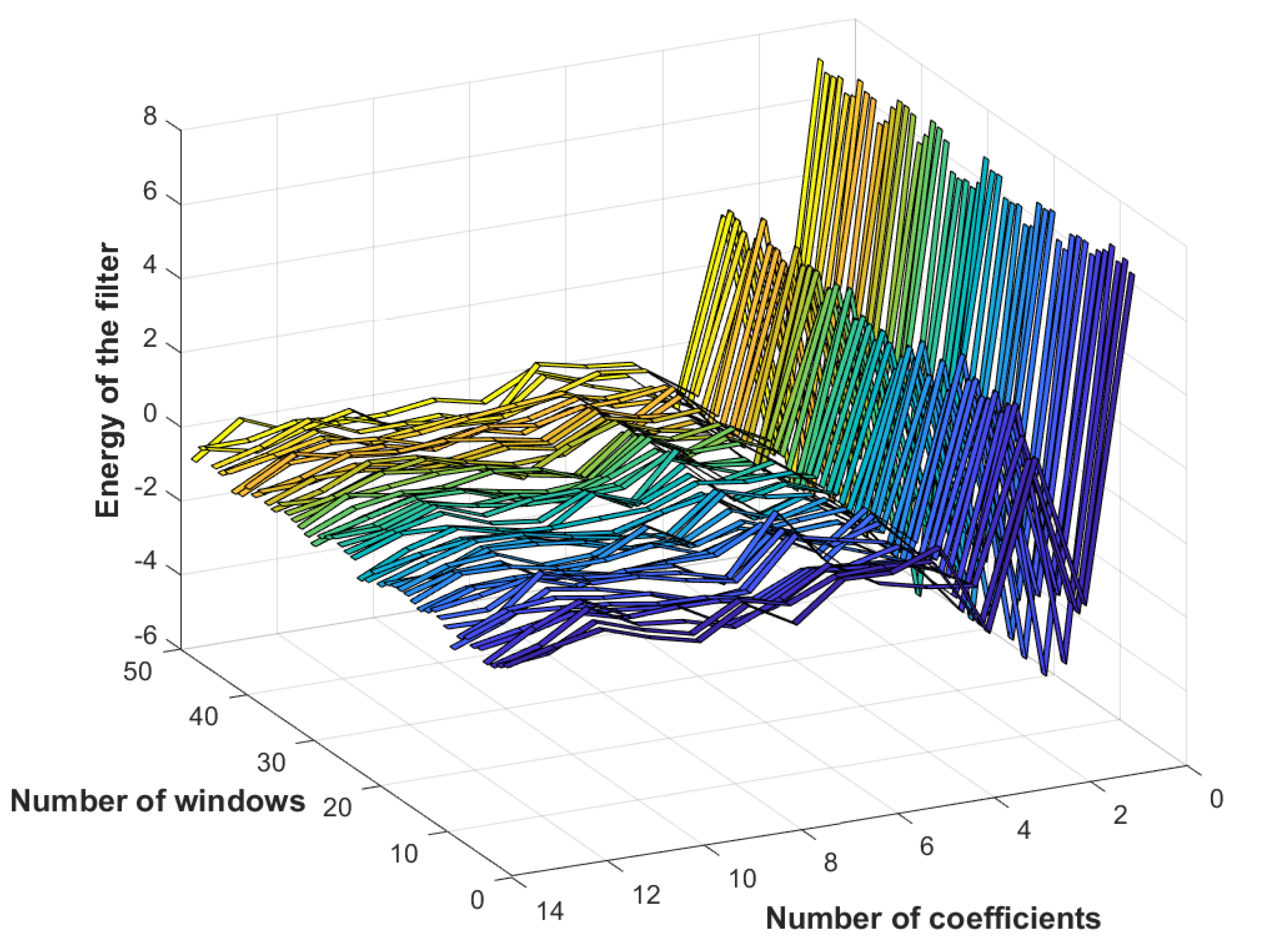
2.1. Linear Prediction Coefficients
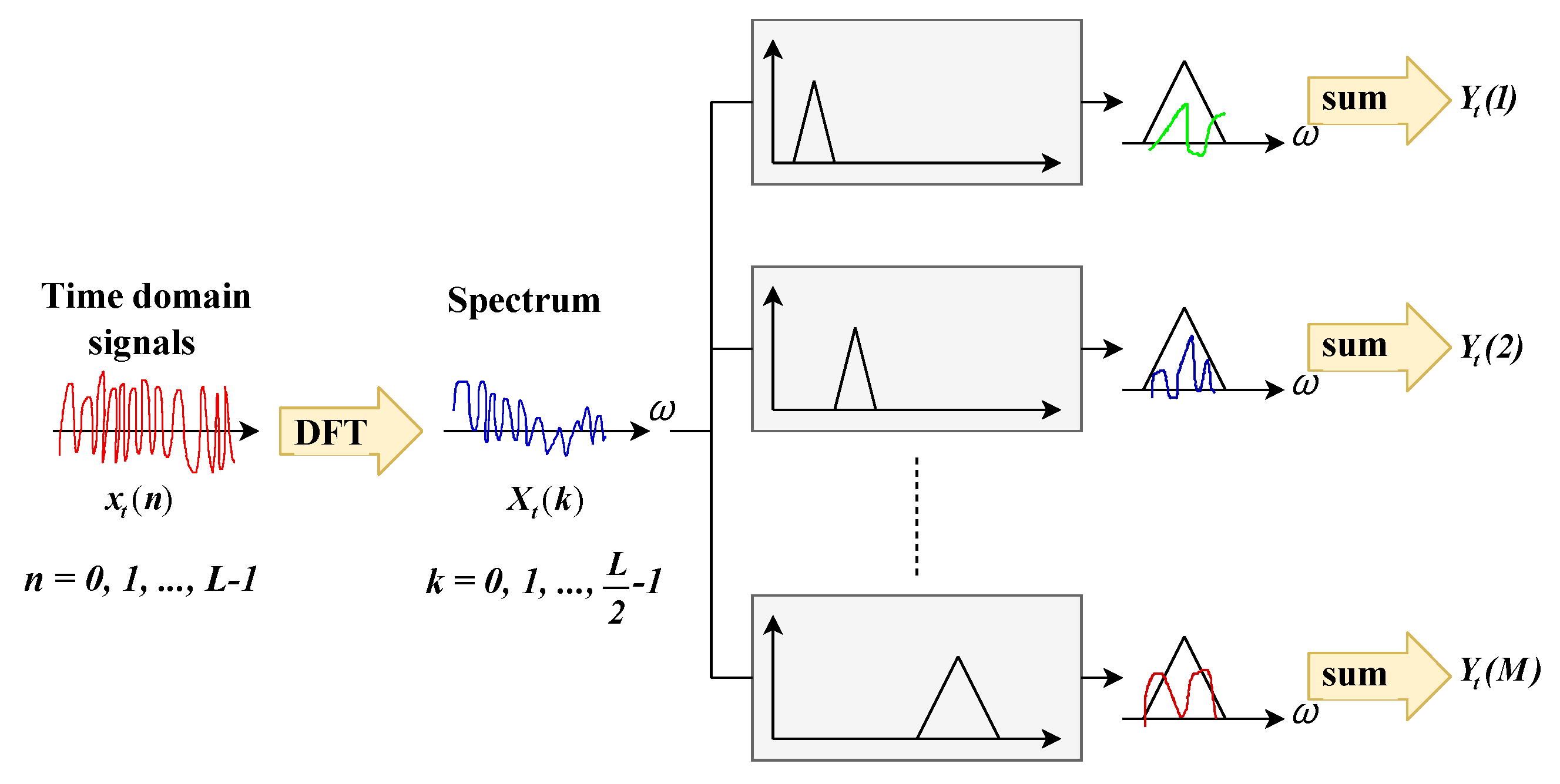
2.2. Mel-Frequency Cepstral Coefficients
2.3. Convolutional Neural Network
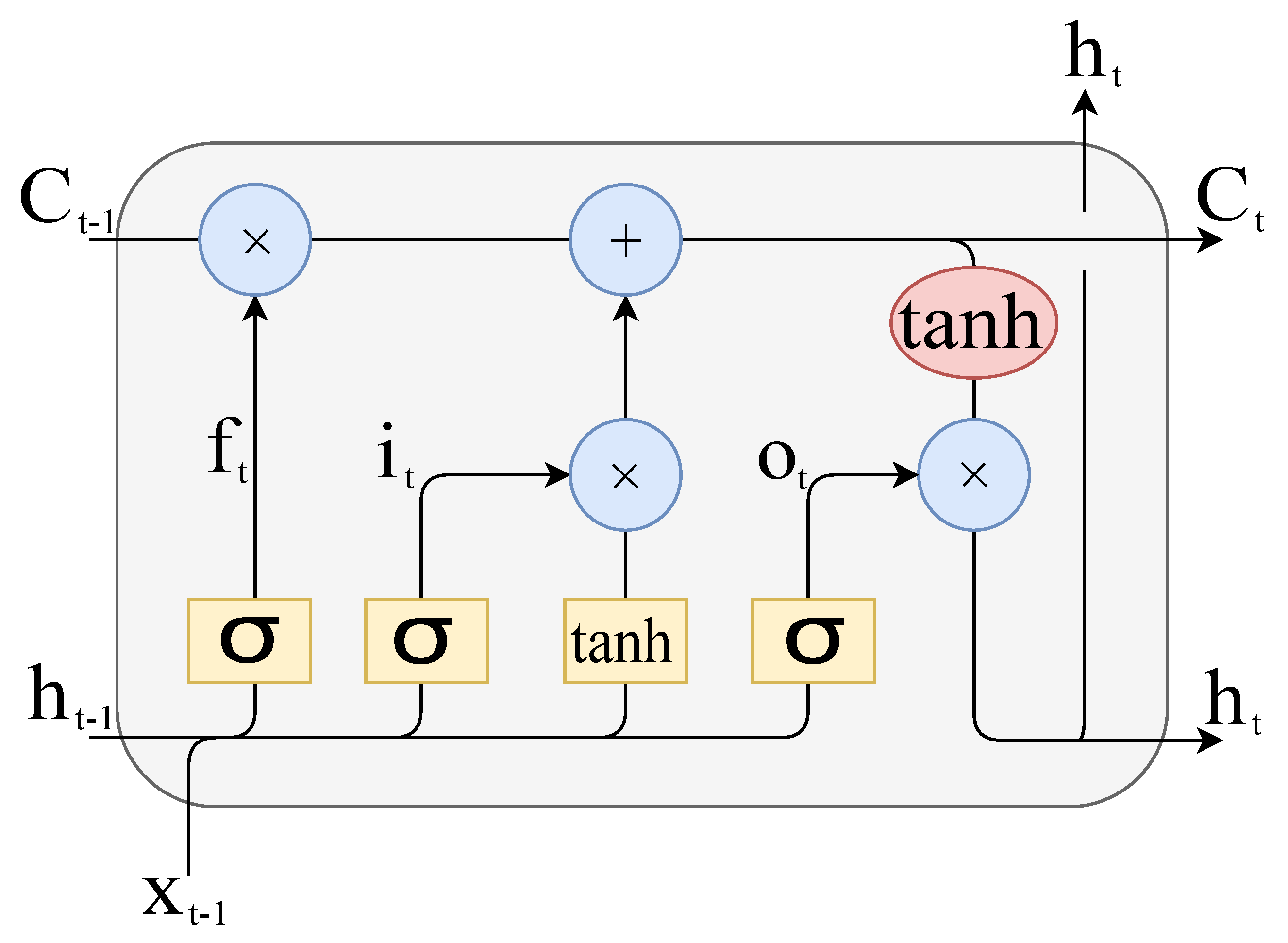
2.4. Long Short-Term Memory
2.5. Evaluation and Classification
3. Experimental-Dataset-Based Evaluation and Validation
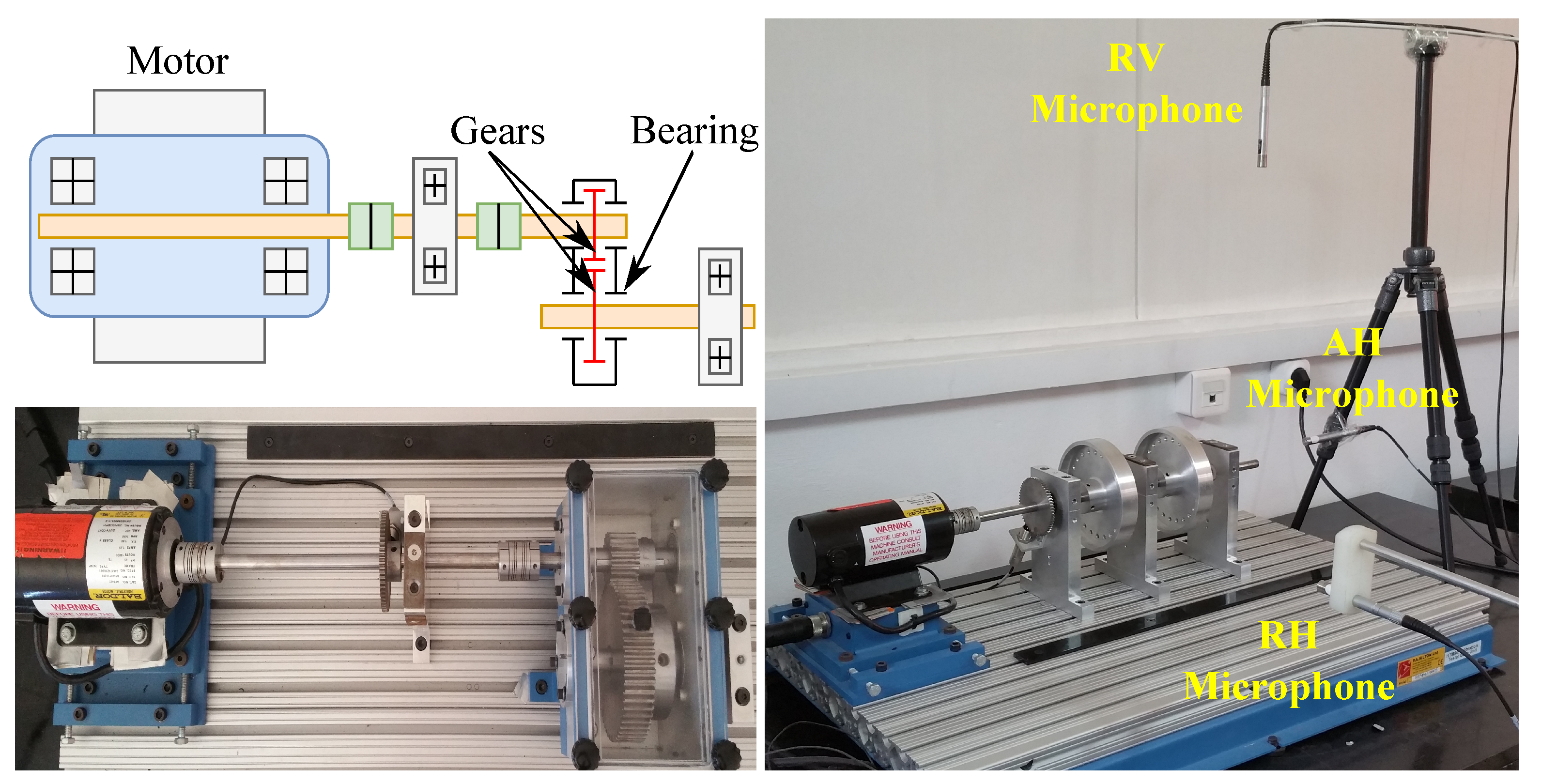
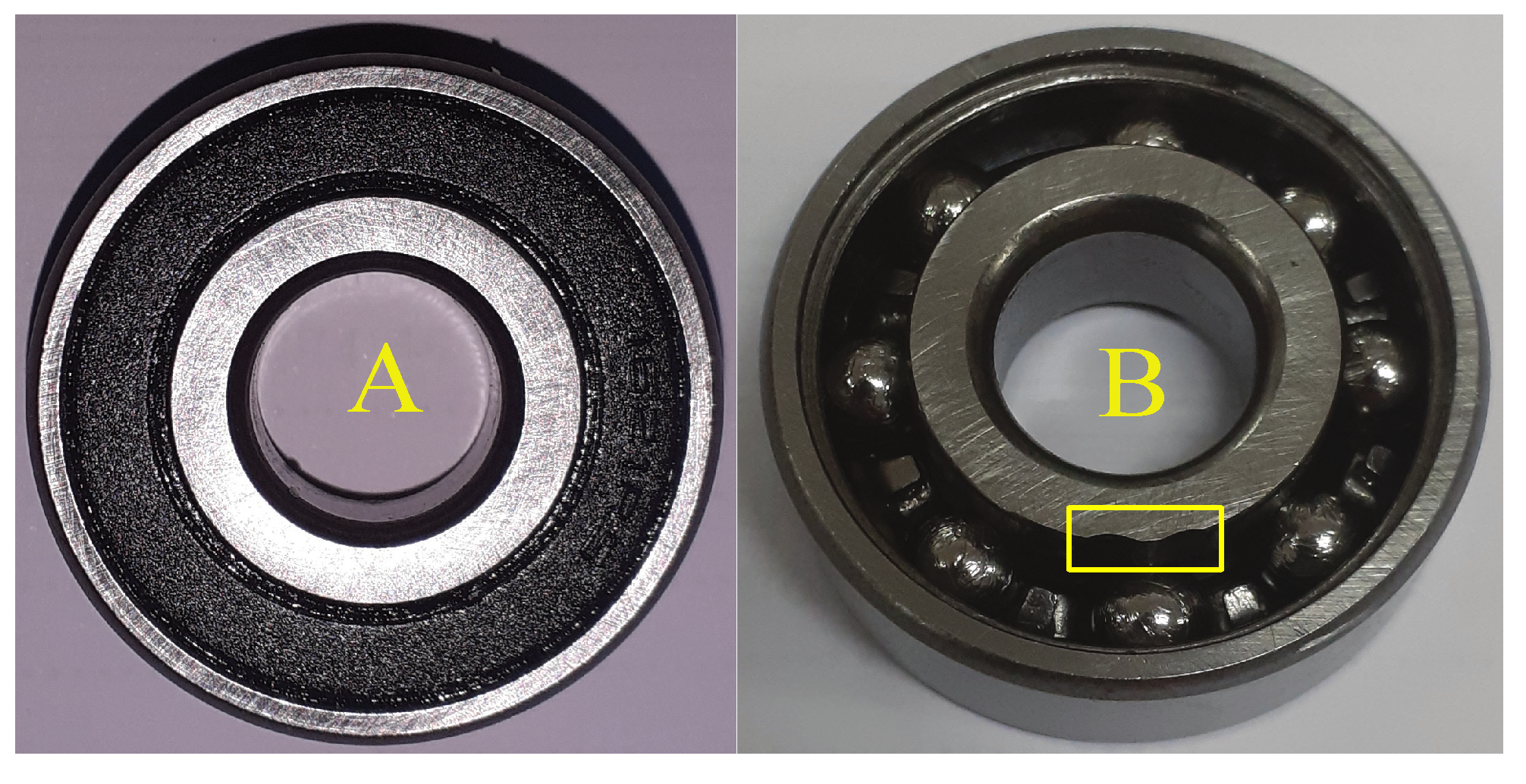
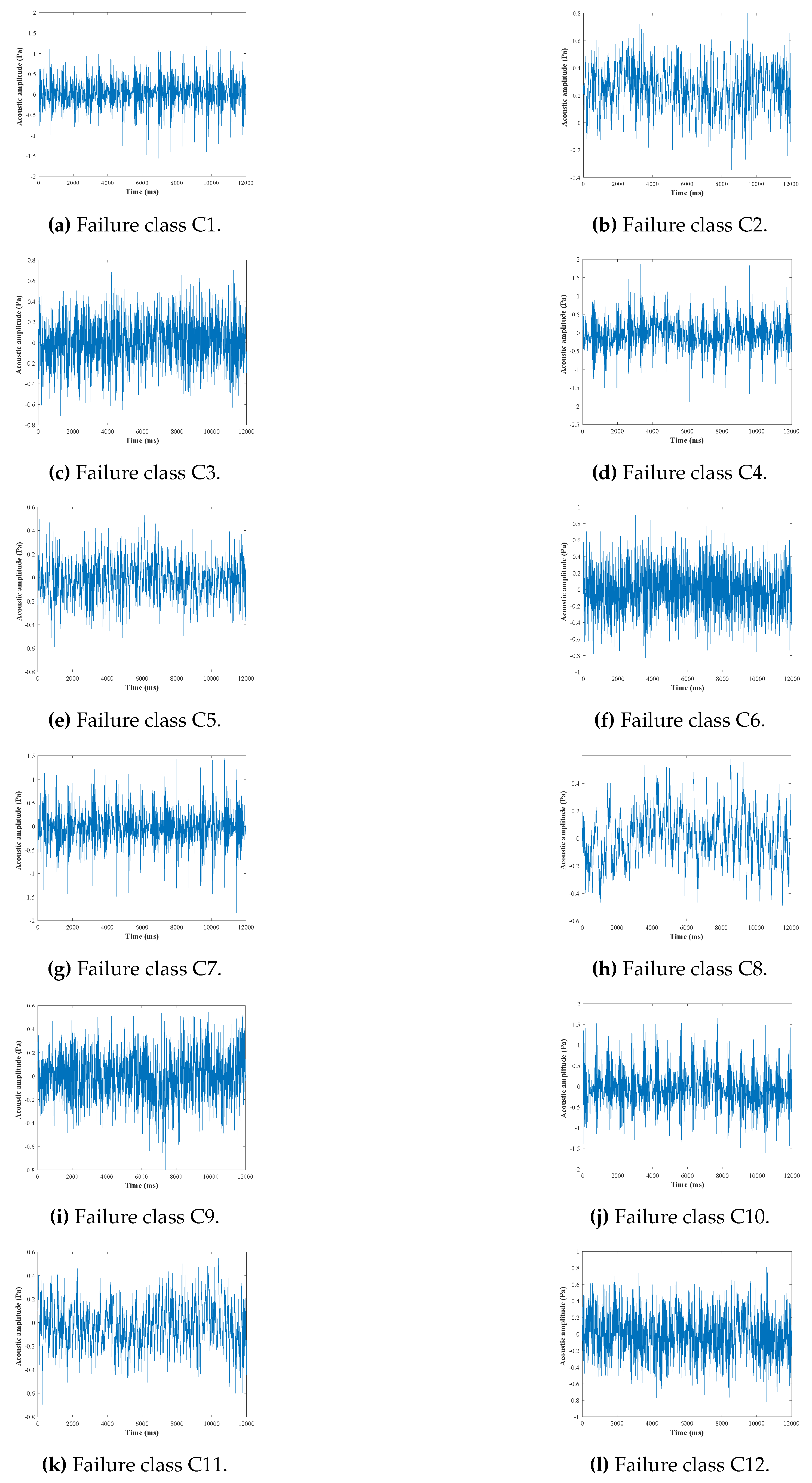
3.1. Experimental Test Bench and Dataset
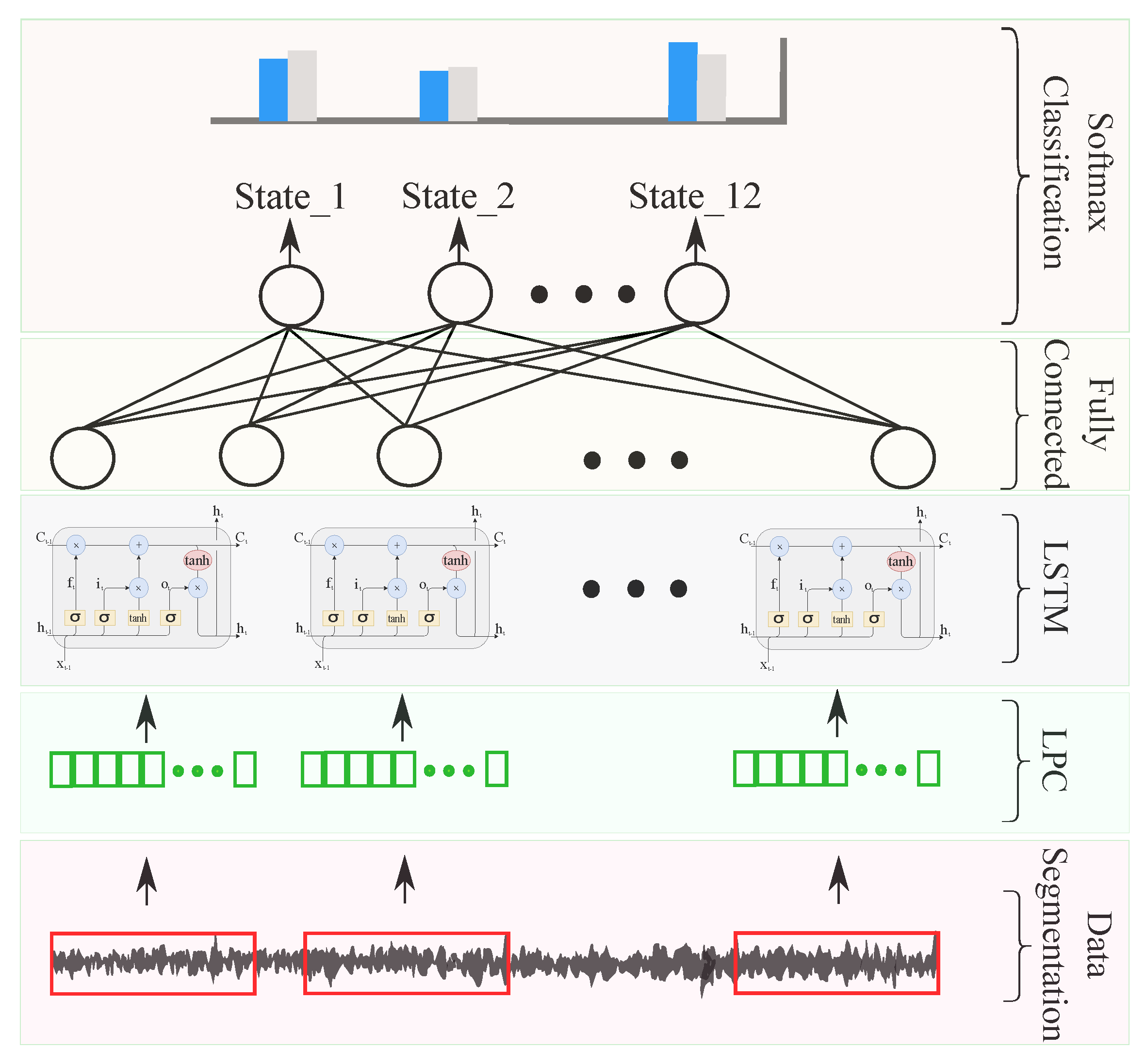
3.2. LPC–LSTM-Based Failure-Diagnosis Methodology
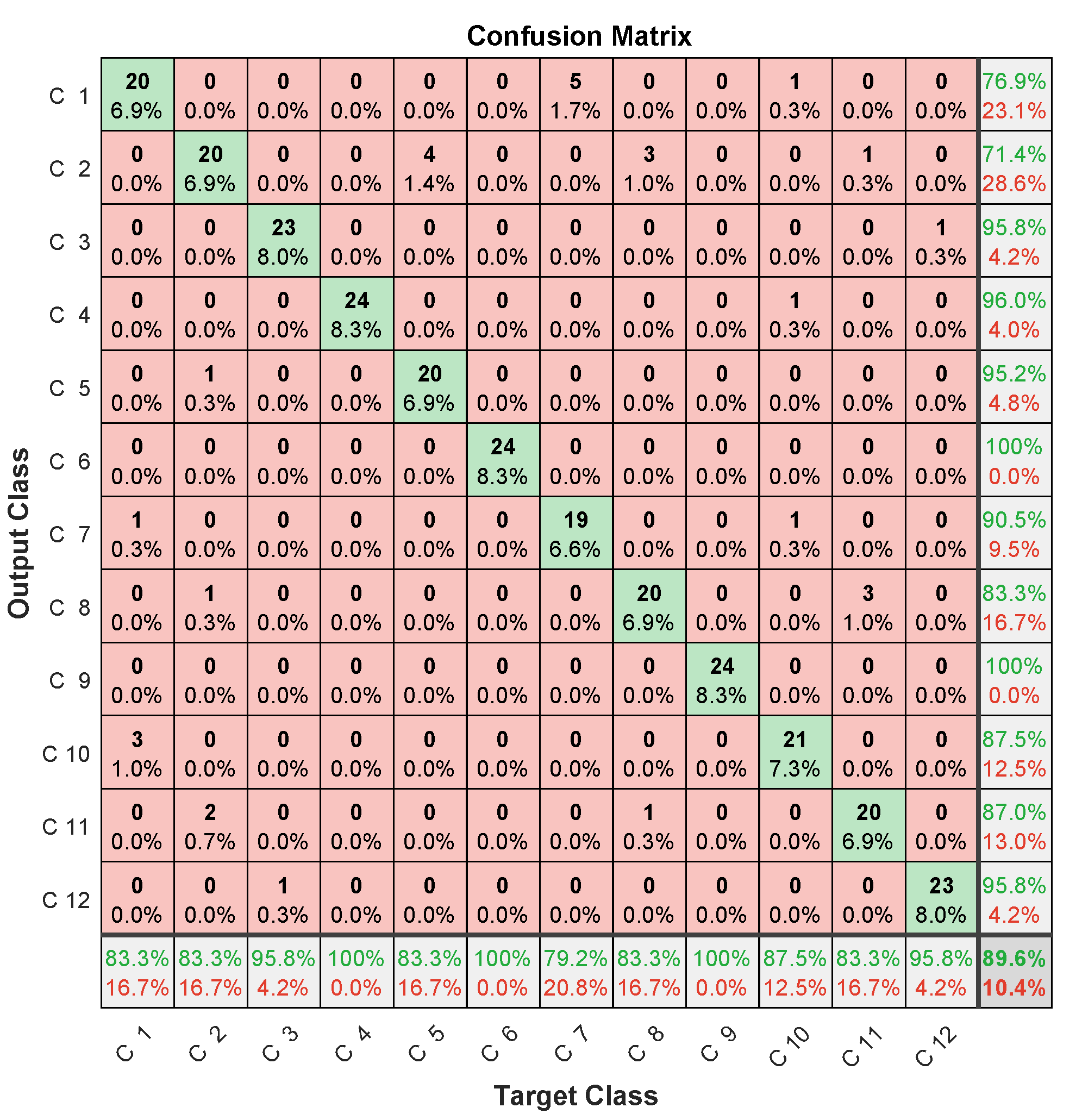
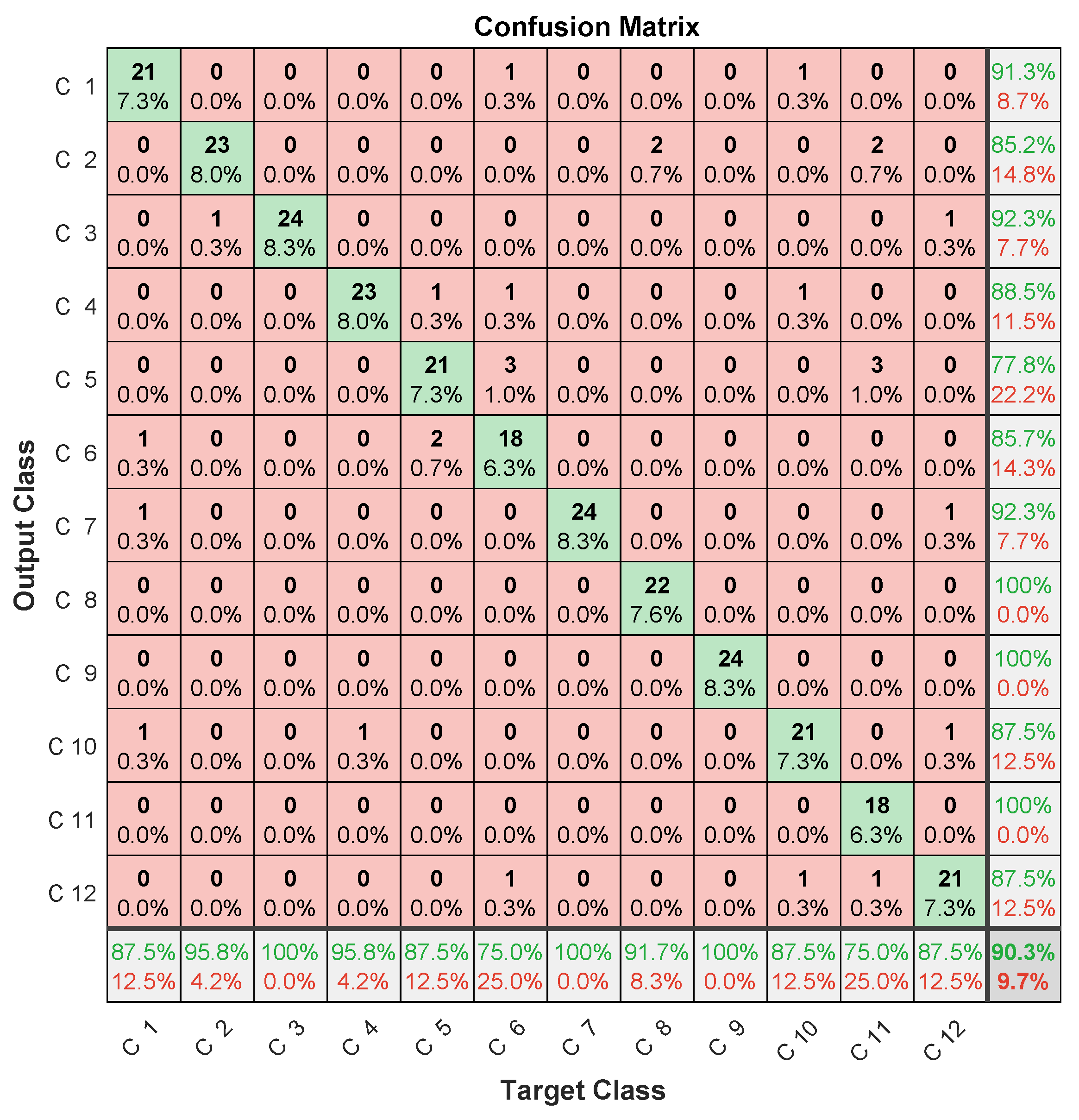
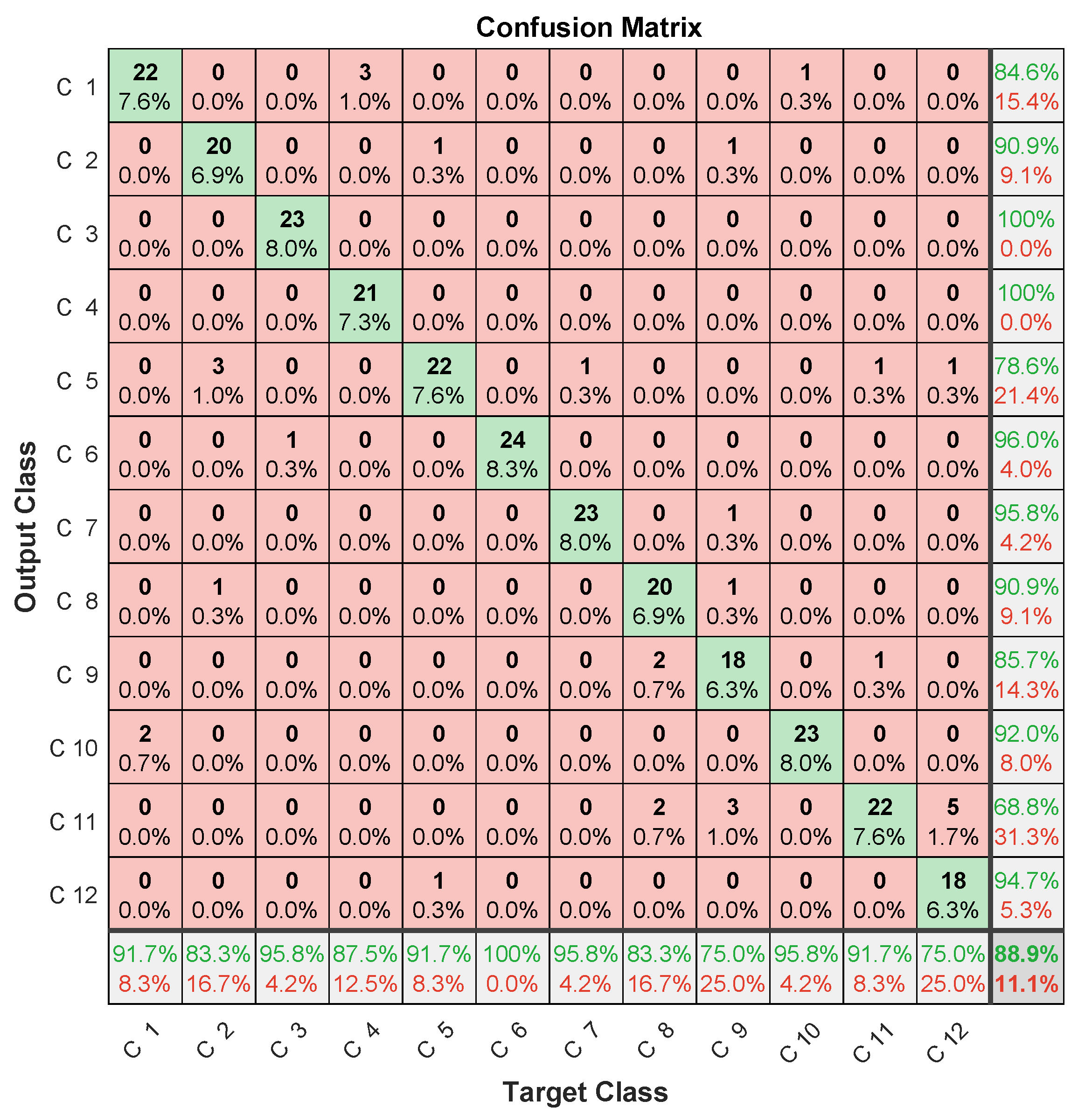
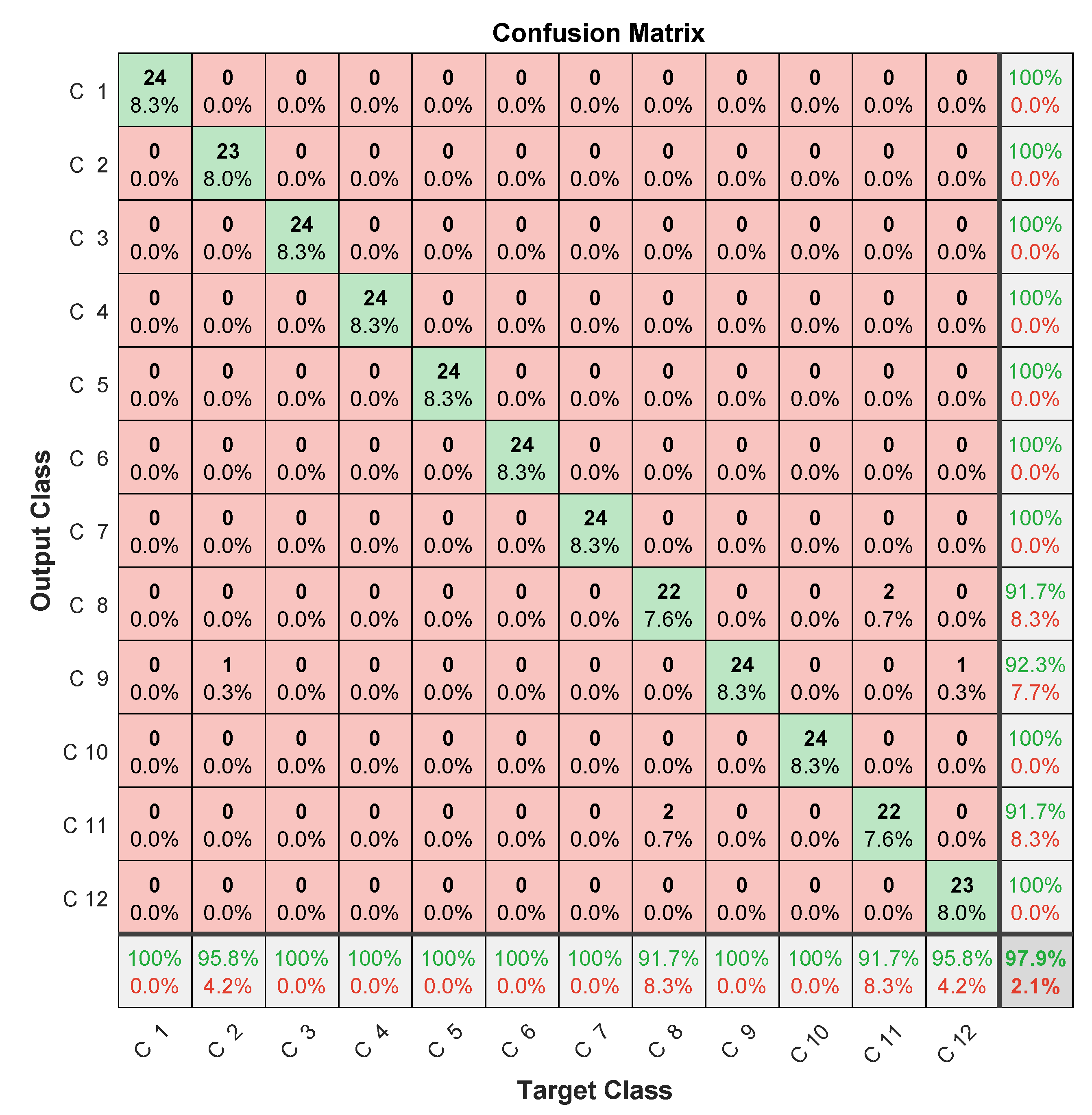
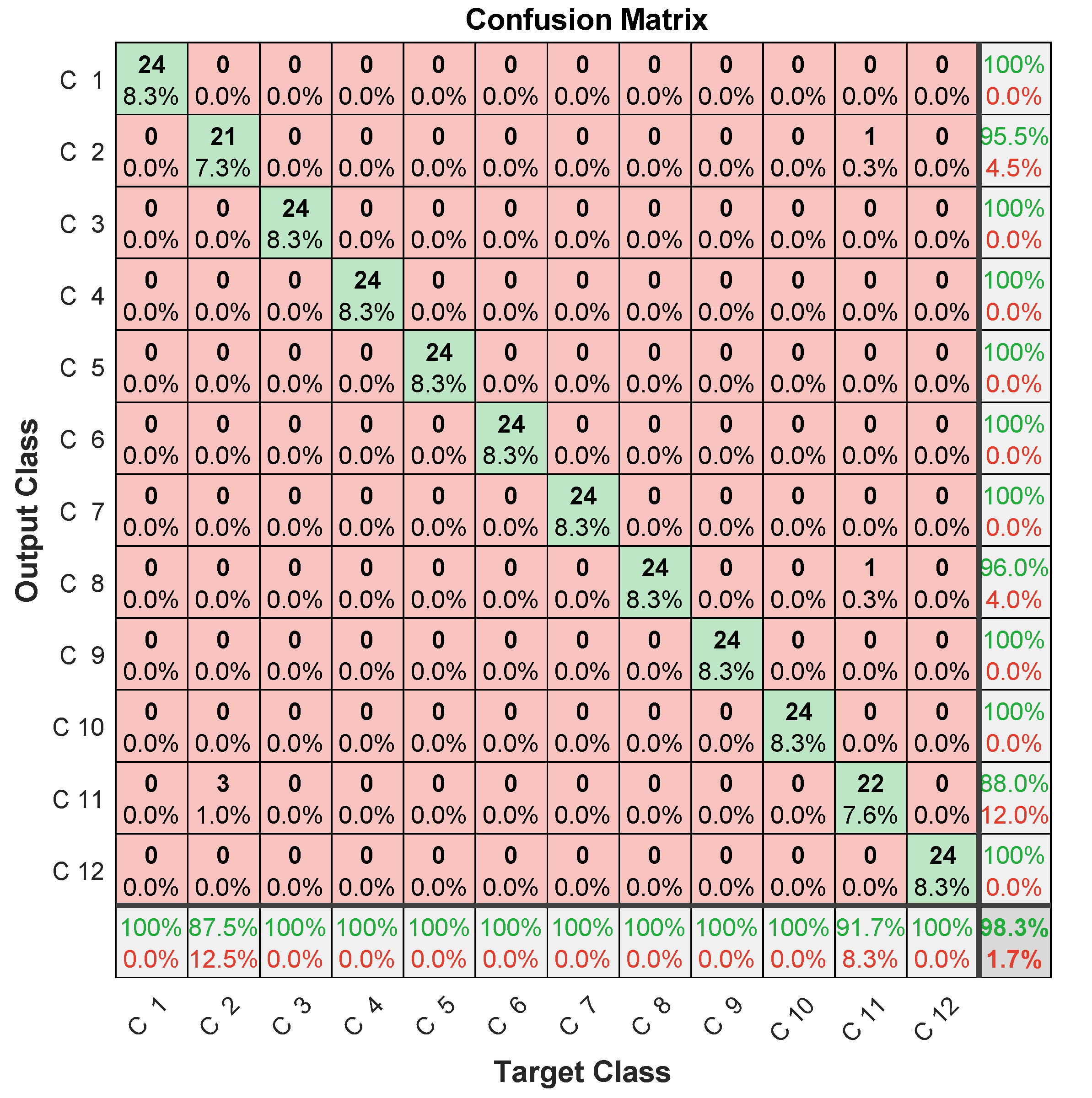
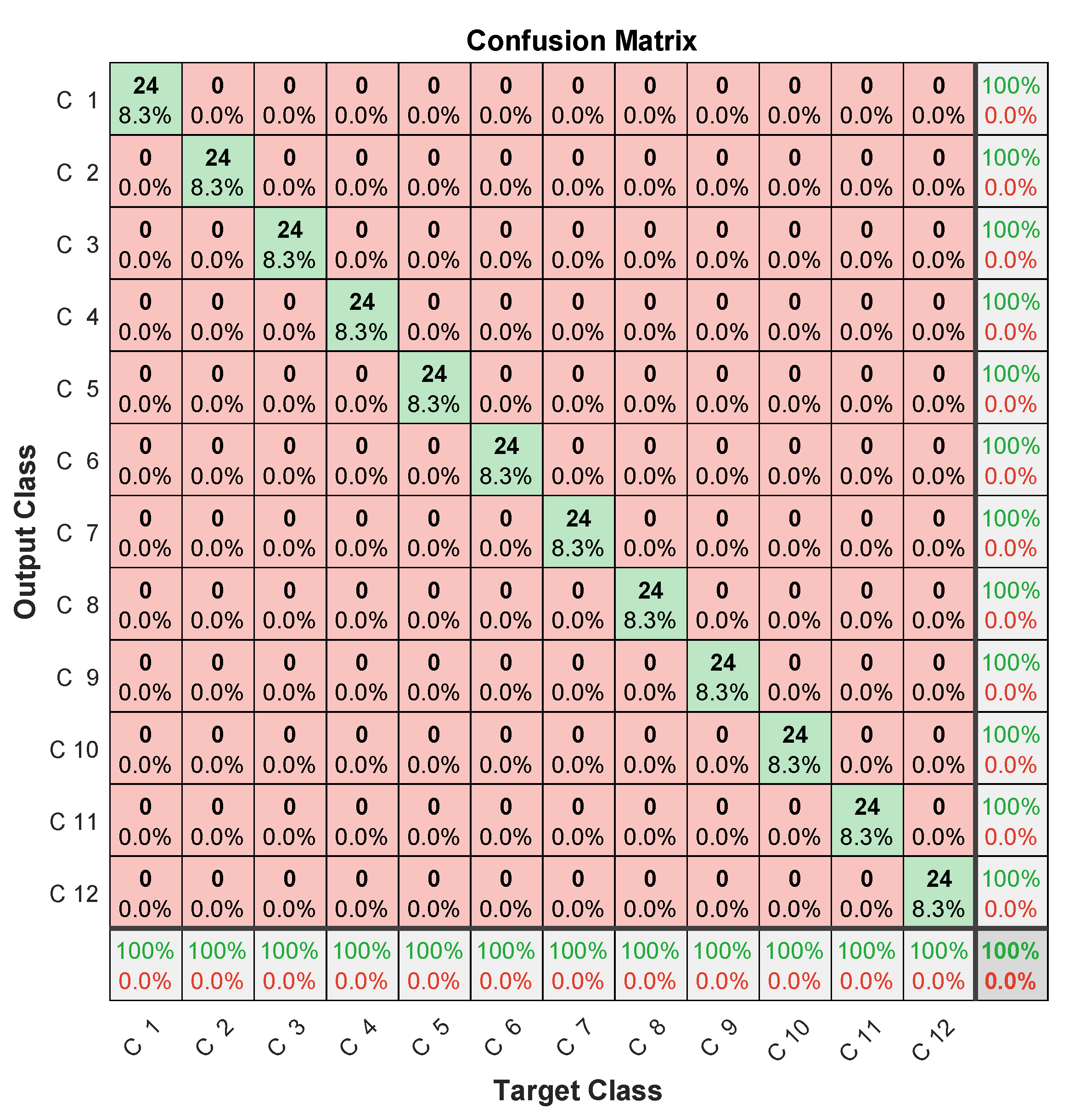
3.3. LPC–LSTM Methodology Results and Evaluation
3.4. MFCC–CNN–LSTM-Based Failure-Diagnosis Methodology
3.5. MFCC–CNN–LSTM Methodology Results and Evaluation
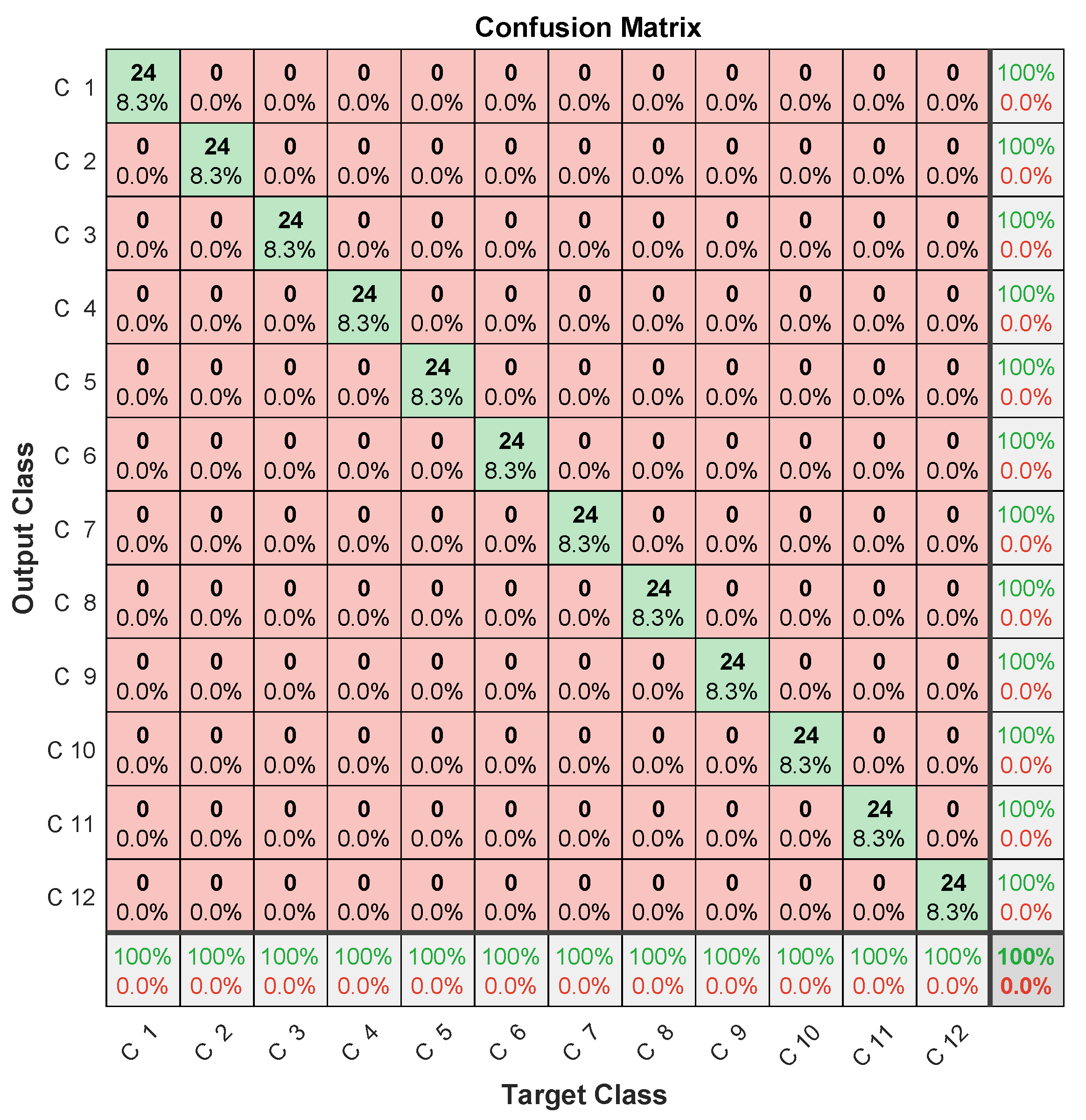
3.6. LPC–LSTM Early Fusion-Based Failure Diagnosis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, T.; Dong, J.; Xie, T.; Diallo, D.; Benbouzid, M. A Self-Learning Fault Diagnosis Strategy Based on Multi-Model Fusion. Information 2019, 10, 116. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Huang, J.; Yang, X.; Luo, J.; Zhang, L.; Pang, Y. Fault Diagnosis for Rotating Machinery Using Multiscale Permutation Entropy and Convolutional Neural Networks. Entropy 2020, 22, 851. [Google Scholar] [CrossRef] [PubMed]
- Ye, X.; Hu, Y.; Shen, J.; Chen, C.; Zhai, G. An Adaptive Optimized TVF-EMD Based on a Sparsity-Impact Measure Index for Bearing Incipient Fault Diagnosis. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar]
- Khan, S.; Yairi, T. A review on the application of deep learning in system health management. Mech. Syst. Signal Process. 2018, 107, 241–265. [Google Scholar] [CrossRef]
- Benbouzid, M. (Ed.) Signal Processing for Fault Detection and Diagnosis in Electric Machines and Systems; Institution of Engineering and Technology: London, UK, 2020. [Google Scholar]
- Khamoudj, C.E.; Si-Tayeb-Benbouzid, F.; Benatchba, K.; Benbouzid, M.; Djaafri, A. A Learning Variable Neighborhood Search Approach for Induction Machines Bearing Failures Detection and Diagnosis. Energies 2020, 13, 2953. [Google Scholar] [CrossRef]
- Tang, G.; Tian, T. Compound Fault Diagnosis of Rolling Bearing Based on Singular Negentropy Difference Spectrum and Integrated Fast Spectral Correlation. Entropy 2020, 22, 367. [Google Scholar] [CrossRef] [Green Version]
- Delpha, C.; Diallo, D.; Harmouche, J.; Benbouzid, M.; Amirat, Y.; Elbouchikhi, E. Bearing Fault Diagnosis in Rotating Machines. Electr. Syst. 2 Diagn. Progn. 2020, 123–151. [Google Scholar] [CrossRef]
- Xiao, Y.; Xue, J.; Zhang, L.; Wang, Y.; Li, M. Misalignment Fault Diagnosis for Wind Turbines Based on Information Fusion. Entropy 2021, 23, 243. [Google Scholar] [CrossRef] [PubMed]
- Amirat, Y.; Choqueuse, V.; Benbouzid, M. EEMD-based wind turbine bearing failure detection using the generator stator current homopolar component. Mech. Syst. Signal Process. 2013, 41, 667–678. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Li, X.; Gao, L.; Li, P. A new subset based deep feature learning method for intelligent fault diagnosis of bearing. Expert Syst. Appl. 2018, 110, 125–142. [Google Scholar] [CrossRef]
- Mao, W.; Sun, B.; Wang, L. A New Deep Dual Temporal Domain Adaptation Method for Online Detection of Bearings Early Fault. Entropy 2021, 23, 162. [Google Scholar] [CrossRef] [PubMed]
- Peimankar, A.; Puthusserypady, S. DENS-ECG: A deep learning approach for ECG signal delineation. Expert Syst. Appl. 2021, 165, 113911. [Google Scholar] [CrossRef]
- Berghout, T.; Mouss, L.H.; Bentrcia, T.; Elbouchikhi, E.; Benbouzid, M. A deep supervised learning approach for condition-based maintenance of naval propulsion systems. Ocean. Eng. 2021, 221, 108525. [Google Scholar] [CrossRef]
- Xu, Z.; Li, C.; Yang, Y. Fault diagnosis of rolling bearing of wind turbines based on the Variational Mode Decomposition and Deep Convolutional Neural Networks. Appl. Soft Comput. 2020, 95, 106515. [Google Scholar] [CrossRef]
- Qiao, M.; Yan, S.; Tang, X.; Xu, C. Deep Convolutional and LSTM Recurrent Neural Networks for Rolling Bearing Fault Diagnosis Under Strong Noises and Variable Loads. IEEE Access 2020, 8, 66257–66269. [Google Scholar] [CrossRef]
- Wang, Q.; Zhu, X.; Ni, Y.; Gu, L.; Zhu, H. Blockchain for the IoT and industrial IoT: A review. Internet Things 2020, 10, 100081. [Google Scholar] [CrossRef]
- Lopez-Arevalo, I.; Aldana-Bobadilla, E.; Molina-Villegas, A.; Galeana-Zapién, H.; Muñiz-Sanchez, V.; Gausin-Valle, S. A Memory-Efficient Encoding Method for Processing Mixed-Type Data on Machine Learning. Entropy 2020, 22, 1391. [Google Scholar] [CrossRef]
- Angelopoulos, A.; Michailidis, E.T.; Nomikos, N.; Trakadas, P.; Hatziefremidis, A.; Voliotis, S.; Zahariadis, T. Tackling Faults in the Industry 4.0 Era—A Survey of Machine-Learning Solutions and Key Aspects. Sensors 2019, 20, 109. [Google Scholar] [CrossRef] [Green Version]
- Ghosh, N.; Paul, R.; Maity, S.; Maity, K.; Saha, S. Fault Matters: Sensor data fusion for detection of faults using Dempster–Shafer theory of evidence in IoT-based applications. Expert Syst. Appl. 2020, 162, 113887. [Google Scholar] [CrossRef]
- Cheng, C.; Wang, J.; Chen, H.; Chen, Z.; Luo, H.; Xie, P. A Review of Intelligent Fault Diagnosis for High-Speed Trains: Qualitative Approaches. Entropy 2020, 23, 1. [Google Scholar] [CrossRef]
- Abdul, Z.K.; Al-Talabani, A.K.; Ramadan, D.O. A Hybrid Temporal Feature for Gear Fault Diagnosis Using the Long Short Term Memory. IEEE Sens. J. 2020, 20, 14444–14452. [Google Scholar] [CrossRef]
- Lei, J.; Liu, C.; Jiang, D. Fault diagnosis of wind turbine based on Long Short-term memory networks. Renew. Energy 2019, 133, 422–432. [Google Scholar] [CrossRef]
- Yang, J.; Guo, Y.; Zhao, W. Long short-term memory neural network based fault detection and isolation for electro-mechanical actuators. Neurocomputing 2019, 360, 85–96. [Google Scholar] [CrossRef]
- Hao, S.; Ge, F.X.; Li, Y.; Jiang, J. Multisensor bearing fault diagnosis based on one-dimensional convolutional long short-term memory networks. Measurement 2020, 159, 107802. [Google Scholar] [CrossRef]
- Park, P.; Marco, P.D.; Shin, H.; Bang, J. Fault Detection and Diagnosis Using Combined Autoencoder and Long Short-Term Memory Network. Sensors 2019, 19, 4612. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- An, Q.; Tao, Z.; Xu, X.; Mansori, M.E.; Chen, M. A data-driven model for milling tool remaining useful life prediction with convolutional and stacked LSTM network. Measurement 2020, 154, 107461. [Google Scholar] [CrossRef]
- Dibaj, A.; Ettefagh, M.M.; Hassannejad, R.; Ehghaghi, M.B. A hybrid fine-tuned VMD and CNN scheme for untrained compound fault diagnosis of rotating machinery with unequal-severity faults. Expert Syst. Appl. 2021, 167, 114094. [Google Scholar] [CrossRef]
- Akpudo, U.E.; Hur, J.W. A Cost-Efficient MFCC-Based Fault Detection and Isolation Technology for Electromagnetic Pumps. Electronics 2021, 10, 439. [Google Scholar] [CrossRef]
- Das, A.; Guha, S.; Singh, P.K.; Ahmadian, A.; Senu, N.; Sarkar, R. A Hybrid Meta-Heuristic Feature Selection Method for Identification of Indian Spoken Languages From Audio Signals. IEEE Access 2020, 8, 181432–181449. [Google Scholar] [CrossRef]
- Wu, C.; Jiang, P.; Ding, C.; Feng, F.; Chen, T. Intelligent fault diagnosis of rotating machinery based on one-dimensional convolutional neural network. Comput. Ind. 2019, 108, 53–61. [Google Scholar] [CrossRef]
- Xie, T.; Wang, T.; Diallo, D.; Razik, H. Imbalance Fault Detection Based on the Integrated Analysis Strategy for Marine Current Turbines under Variable Current Speed. Entropy 2020, 22, 1069. [Google Scholar] [CrossRef] [PubMed]
- Amirat, Y.; Benbouzid, M.; Wang, T.; Bacha, K.; Feld, G. EEMD-based notch filter for induction machine bearing faults detection. Appl. Acoust. 2018, 133, 202–209. [Google Scholar] [CrossRef]
- Bäckström, T. Speech Coding: With Code-Excited Linear Prediction; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Ebrahimnezhad, H.; Khoshnoud, S. Classification of arrhythmias using linear predictive coefficients and probabilistic neural network. Appl. Med. Inform. 2013, 33, 55–62. [Google Scholar]
- Li, X.; Zhang, W.; Ding, Q. Deep learning-based remaining useful life estimation of bearings using multi-scale feature extraction. Reliab. Eng. Syst. Saf. 2019, 182, 208–218. [Google Scholar] [CrossRef]
- Guoping, Z. On the confusion matrix in credit scoring and its analytical properties. Commun. Stat. Theory Methods 2019, 49, 2080–2093. [Google Scholar]
- Wang, R.; Liu, F.; Hou, F.; Jiang, W.; Hou, Q.; Yu, L. A Non-Contact Fault Diagnosis Method for Rolling Bearings Based on Acoustic Imaging and Convolutional Neural Networks. IEEE Access 2020, 8, 132761–132774. [Google Scholar] [CrossRef]
- Wang, X.; Mao, D.; Li, X. Bearing fault diagnosis based on vibro-acoustic data fusion and 1D-CNN network. Measurement 2021, 173, 108518. [Google Scholar] [CrossRef]
- Zhang, D.; Stewart, E.; Entezami, M.; Roberts, C.; Yu, D. Intelligent acoustic-based fault diagnosis of roller bearings using a deep graph convolutional network. Measurement 2020, 156, 107585. [Google Scholar] [CrossRef]
- Glowacz, A.; Tadeusiewicz, R.; Legutko, S.; Caesarendra, W.; Irfan, M.; Liu, H.; Brumercik, F.; Gutten, M.; Sulowicz, M.; Daviu, J.A.A.; et al. Fault diagnosis of angle grinders and electric impact drills using acoustic signals. Appl. Acoust. 2021, 179, 108070. [Google Scholar] [CrossRef]
- Wang, W.; Yang, J.; Chen, M.; Wang, P. A Light CNN for End-to-End Car License Plates Detection and Recognition. IEEE Access 2019, 7, 173875–173883. [Google Scholar] [CrossRef]
- Liu, J.; Li, T.; Xie, P.; Du, S.; Teng, F.; Yang, X. Urban big data fusion based on deep learning: An overview. Inf. Fusion 2020, 53, 123–133. [Google Scholar] [CrossRef]
- Vamsi, I.; Sabareesh, G.; Penumakala, P. Comparison of condition monitoring techniques in assessing fault severity for a wind turbine gearbox under non-stationary loading. Mech. Syst. Signal Process. 2019, 124, 1–20. [Google Scholar] [CrossRef]
- Gogate, M.; Dashtipour, K.; Hussain, A. Visual Speech In Real Noisy Environments (VISION): A Novel Benchmark Dataset and Deep Learning-Based Baseline System. Proc. Interspeech 2020, 2020, 4521–4525. [Google Scholar]
- Zhang, L.; Gao, H.; Wen, J.; Li, S.; Liu, Q. A deep learning-based recognition method for degradation monitoring of ball screw with multi-sensor data fusion. Microelectron. Reliab. 2017, 75, 215–222. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gear States | |||||
|---|---|---|---|---|---|
| Healthy | Broken Side | Broken Tooth | Notched | ||
| Bearing states | Inner race defect | C1 | C4 | C7 | C10 |
| Healthy | C2 | C5 | C8 | C11 | |
| Rusty | C3 | C6 | C9 | C12 | |
| 1st Microphone | 2nd Microphone | 3rd Microphone | |
|---|---|---|---|
| Accuracy | 89.58% | 90.28% | 88.89% |
| 1st Microphone | 2nd Microphone | 3rd Microphone | |
|---|---|---|---|
| Accuracy | 97.9% | 98.3% | 100% |
| 1st Microphone | 2nd Microphone | 3rd Microphone | Fusion | |
|---|---|---|---|---|
| Accuracy | 89.58% | 90.28% | 88.89% | 100% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Habbouche, H.; Benkedjouh, T.; Amirat, Y.; Benbouzid, M. Gearbox Failure Diagnosis Using a Multisensor Data-Fusion Machine-Learning-Based Approach. Entropy 2021, 23, 697. https://doi.org/10.3390/e23060697
Habbouche H, Benkedjouh T, Amirat Y, Benbouzid M. Gearbox Failure Diagnosis Using a Multisensor Data-Fusion Machine-Learning-Based Approach. Entropy. 2021; 23(6):697. https://doi.org/10.3390/e23060697
Chicago/Turabian StyleHabbouche, Houssem, Tarak Benkedjouh, Yassine Amirat, and Mohamed Benbouzid. 2021. "Gearbox Failure Diagnosis Using a Multisensor Data-Fusion Machine-Learning-Based Approach" Entropy 23, no. 6: 697. https://doi.org/10.3390/e23060697