
From Continuous-Time Chaotic Systems to Pseudo Random Number Generators: Analysis and Generalized Methodology



Abstract
:1. Introduction
2. Continuous-Time Chaotic Systems
2.1. Fourth Order Runge–Kutta Method (RK4)
2.2. Heun’s Method (HUN)
2.3. Euler’s Method (EUR)
2.4. Modified Euler Proposed Method (EUR_MOD)
3. Quantifiers
3.1. Maximum Lyapunov Exponent
3.2. Bifurcation Diagram
3.3. Probability Density Function (PDF)
3.3.1. Normalized Shannon Entropy
3.3.2. Statistical Complexity Measure
3.4. Statistical Randomness Tests
3.4.1. NIST Statistical Test Suite
3.4.2. Marsaglia Diehard Tests
4. Results
- map, Rössler system digitalized by the 4th order Runge Kutta method.
- map, Rössler system digitalized by the Heun method.
- map, Rössler system digitalized by the Euler method.
- map, Rössler system digitalized by our proposed Euler modified method.
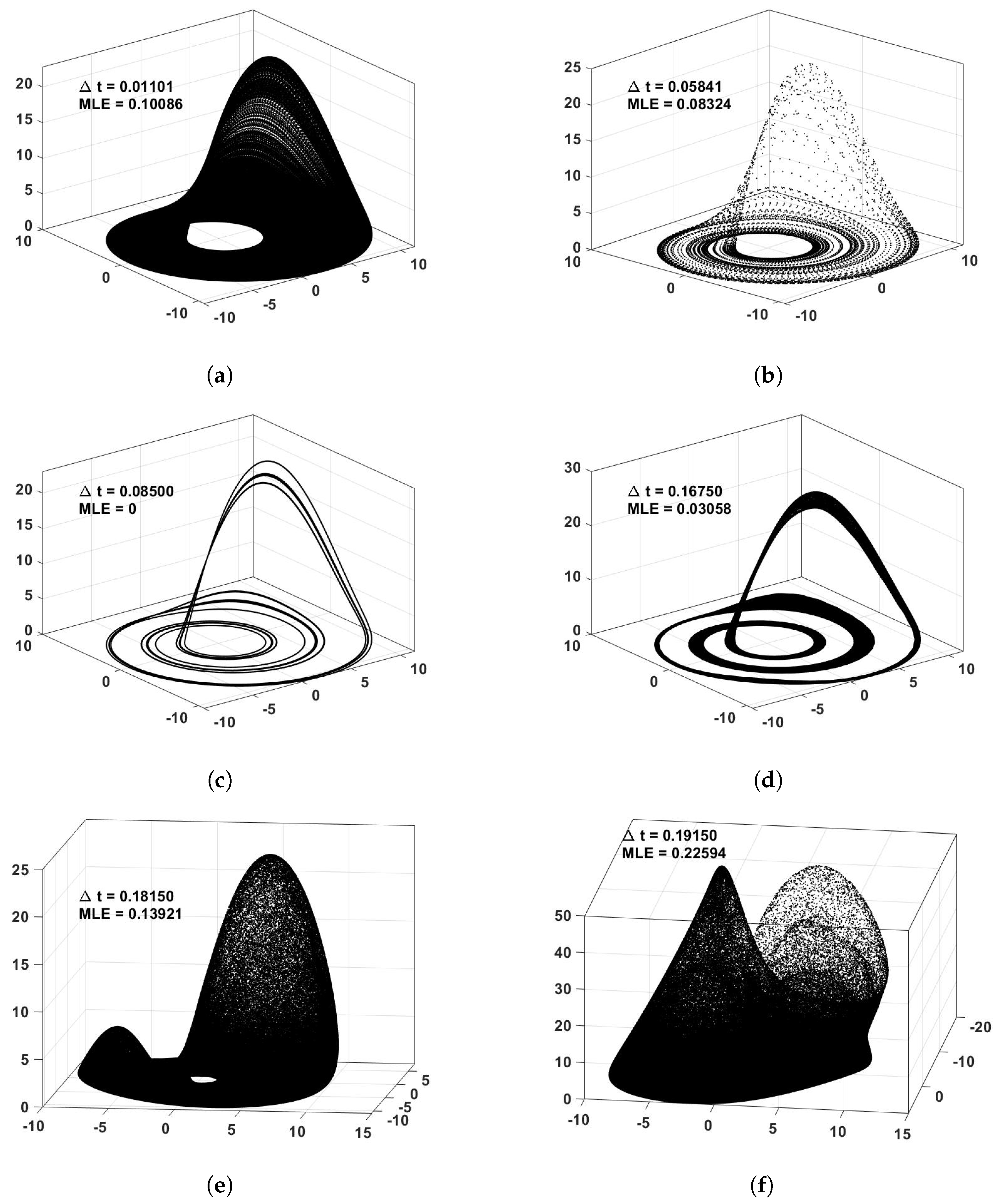
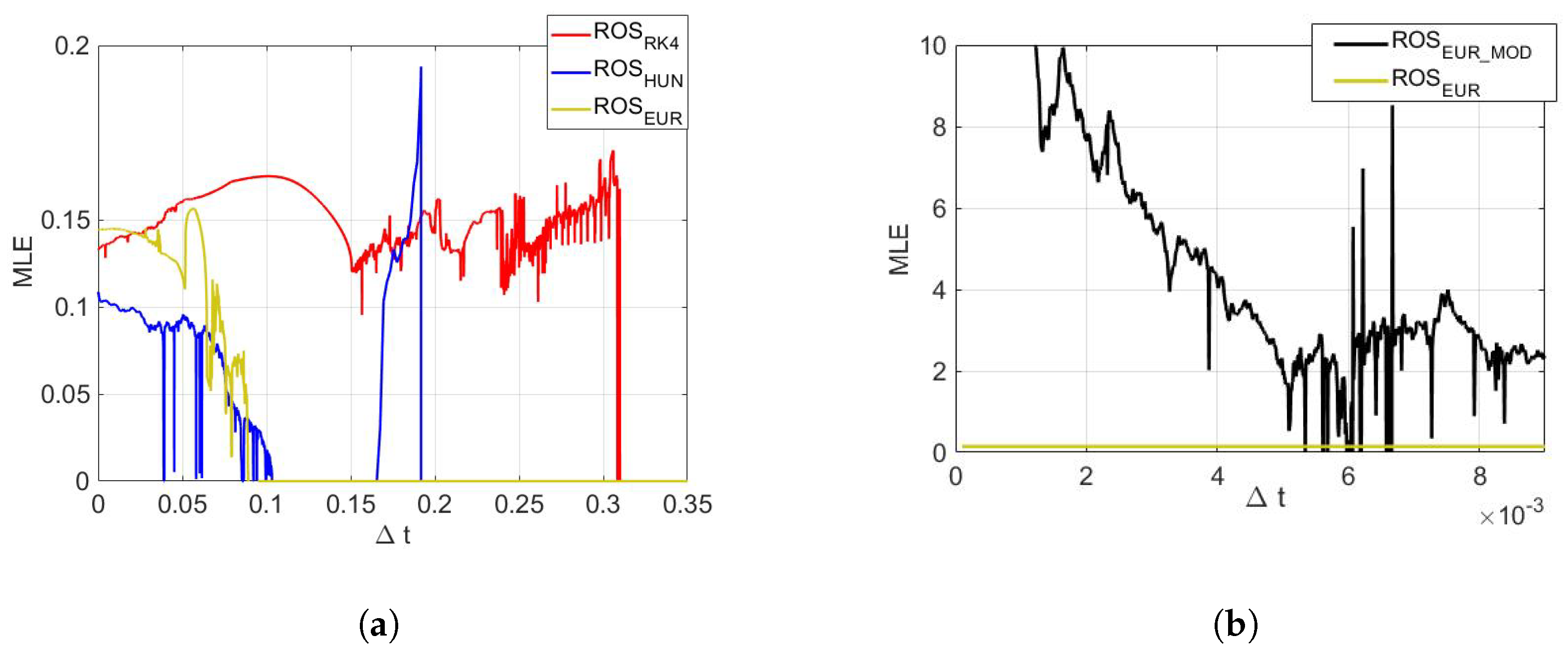
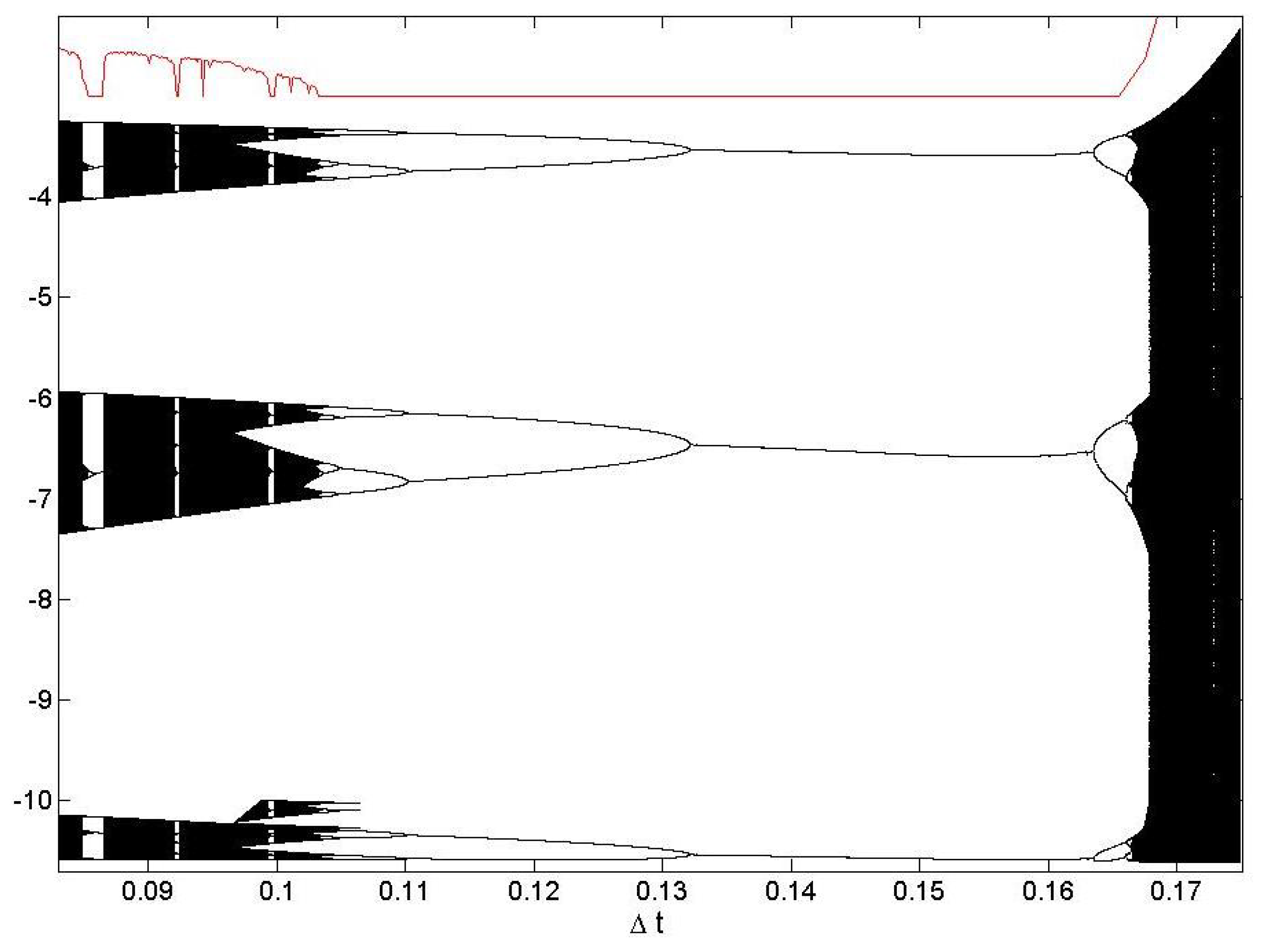
- First, we analyzed the chaotic behavior when the systems are digitalized in time; focusing on the impact on the dynamic of each discretization method and its dependence on (Section 4.1). Therefore, we calculate the MLE [29] and bifurcation diagrams of the emerged maps. Note that at this point, we do not consider amplitude discretization of the systems. Therefore, we employ a floating-point arithmetic (IEEE 754 double-precision standard) for the calculations.
- The second step deals with the amplitude digitization effect (Section 4.2). Then, we analyze the statistical properties, focusing on achieving the highest randomness.
- Finally, we present the hardware implementation of the obtained PRNG that is based on the proposed modification to the system digitalized in time by Euler’s method and iterated using signed fixed-point architecture. We also show the resources needed to implement it in an FPGA board (Section 4.3).
4.1. Time Digitization Analysis
4.1.1. Topological Analysis
4.1.2. Statistical Analysis
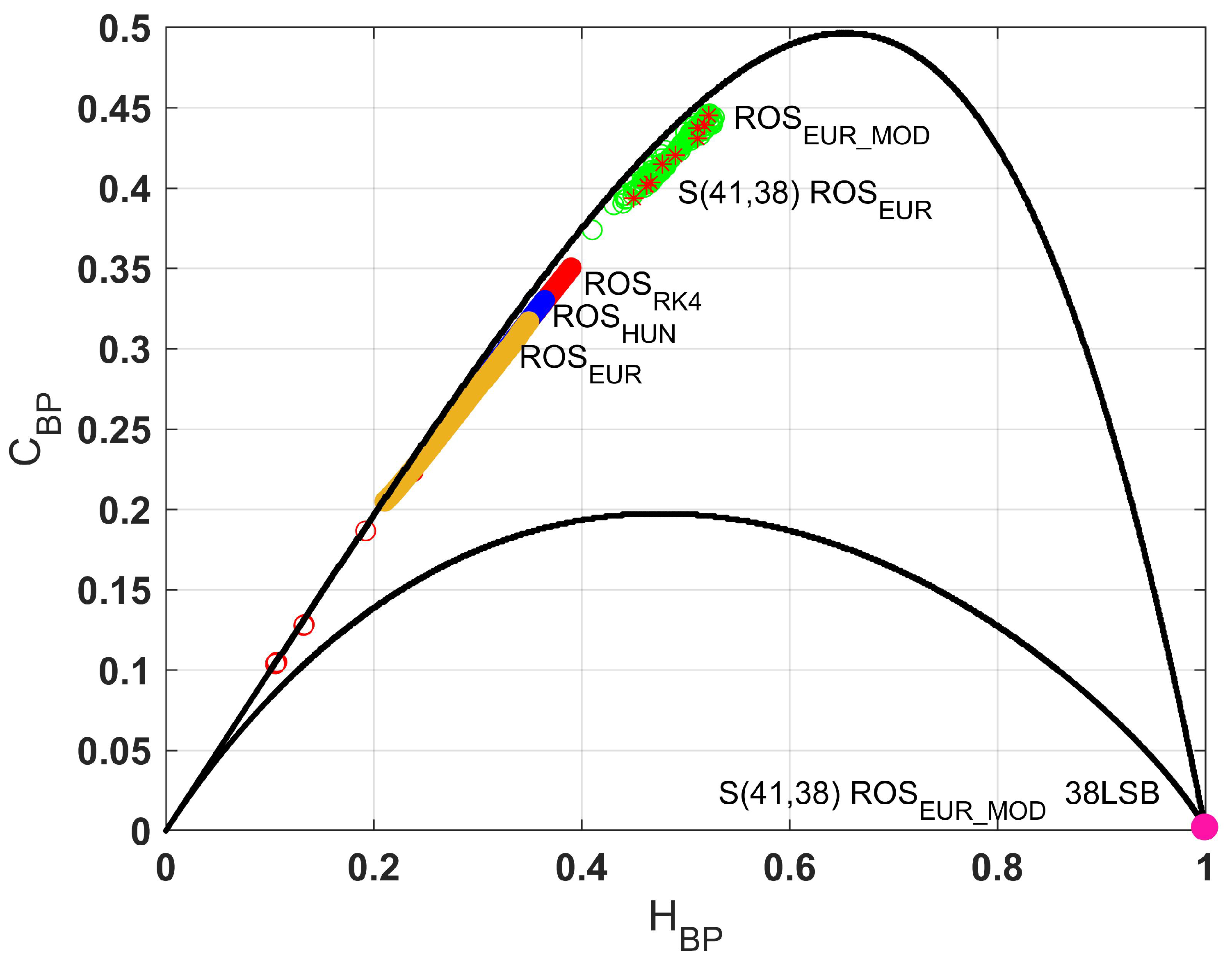
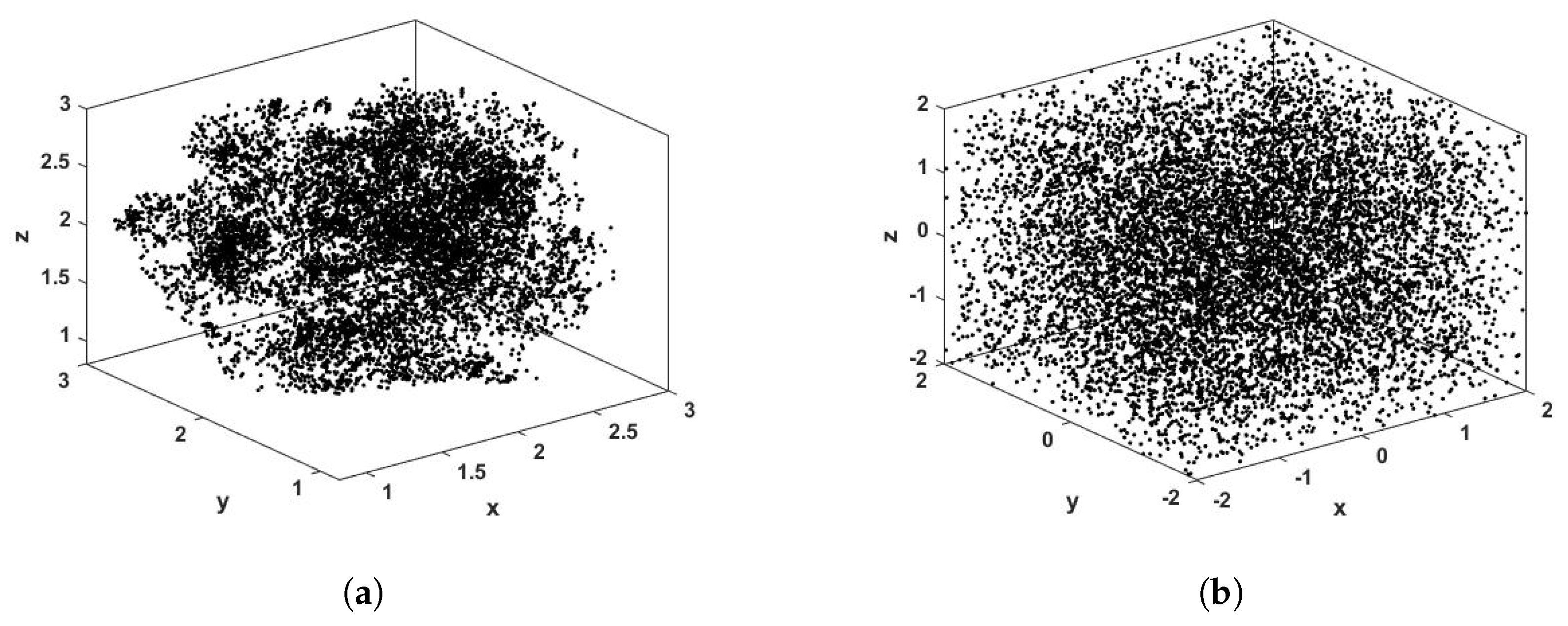
4.2. Amplitude Digitization Analysis
- map:
- map:
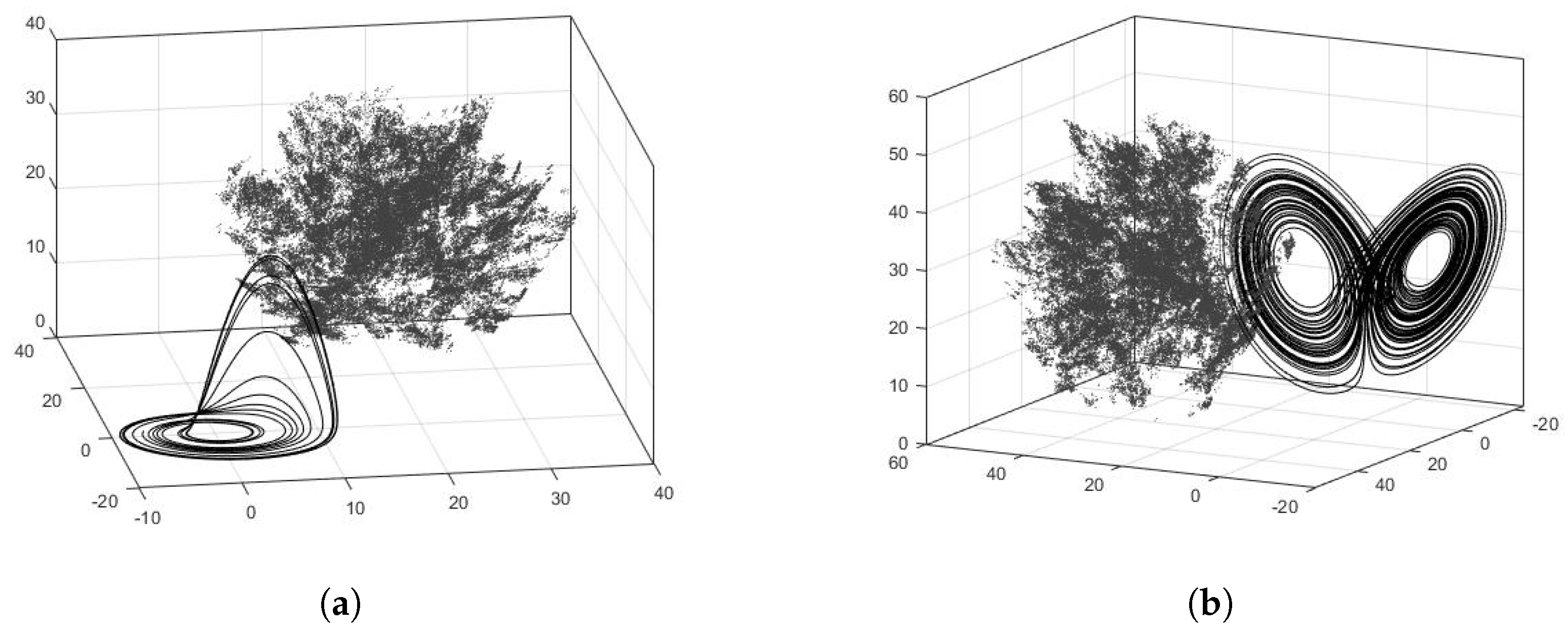
4.2.1. Topological Analysis
4.2.2. Statistical Analysis
4.3. Hardware Implementation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Deng, Y.; Hu, H.; Liu, L. Feedback control of digital chaotic systems with application to pseudorandom number generator. Int. J. Mod. Phys. C 2015, 26, 1550022. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiao, D.; Wen, W.; Nan, H.; Su, M. Secure binary arithmetic coding based on digitalized modified logistic map and linear feedback shift register. Commun. Nonlinear Sci. Numer. Simul. 2015, 27, 22–29. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, Z.; Wang, G.; Liu, D. A pseudorandom number generator based on a 4D piecewise logistic map with coupled parameters. Int. J. Bifurcat. Chaos 2019, 29, 1950124. [Google Scholar] [CrossRef]
- Falcioni, M.; Palatella, L.; Pigolotti, S.; Vulpiani, A. Properties making a chaotic system a good pseudo random number generator. Phys. Rev. E 2005, 72, 016220. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Hu, H.; Ming, H.; Liu, X. Theoretical design and circuit implementation of novel digital chaotic systems via hybrid control. Chaos Solitons Fractals 2020, 138, 109863. [Google Scholar] [CrossRef]
- Senouci, A.; Bouhedjeur, H.; Tourche, K.; Boukabou, A. FPGA based hardware and device-independent implementation of chaotic generators. AEU-Int. J. Electron. C 2017, 82, 211–220. [Google Scholar] [CrossRef]
- Lozi, R. Emergence of randomness from chaos. Int. J. Bifurcat. Chaos 2012, 22, 1250021. [Google Scholar] [CrossRef] [Green Version]
- Muhammad, A.S.; Özkaynak, F. SIEA: Secure Image Encryption Algorithm Based on Chaotic Systems Optimization Algorithms and PUFs. Symmetry 2021, 13, 824. [Google Scholar] [CrossRef]
- Li, S.; Mou, X.; Cai, Y. Pseudo-random bit generator based on couple chaotic systems and its applications in stream-cipher cryptography. In Proceedings of the International Conference on Cryptology in India, Chennai, India, 16–20 December 2001; Rangan, C.P., Ding, C., Eds.; Springer: Berlin/Heidelberg, Germany, 2001; pp. 316–329. [Google Scholar]
- De Micco, L.; González, C.M.; Larrondo, H.A.; Martín, M.T.; Plastino, A.; Rosso, O.A. Randomizing nonlinear maps via symbolic dynamics. Phys. A 2008, 387, 3373–3383. [Google Scholar] [CrossRef]
- Yuan, F.; Deng, Y.; Li, Y.; Chen, G. A cascading method for constructing new discrete chaotic systems with better randomness. Chaos Interdiscip. J. Nonlinear. Sci. 2019, 29, 053120. [Google Scholar] [CrossRef] [PubMed]
- Setti, G.; Mazzini, G.; Rovatti, R.; Callegari, S. Statistical modeling of discrete-time chaotic processes-basic finite-dimensional tools and applications. Proc. IEEE 2002, 90, 662–690. [Google Scholar] [CrossRef]
- Öztürk, I.; Kılıç, R. A novel method for producing pseudo random numbers from differential equation-based chaotic systems. Nonlinear Dyn. 2015, 80, 1147–1157. [Google Scholar] [CrossRef]
- Li, S.; Mou, X.; Ji, Z.; Zhang, J.; Cai, Y. High-performance multimedia encryption system based on chaos. Phys. Lett. A 2003, 307, 22. [Google Scholar] [CrossRef] [Green Version]
- Hu, H.; Liu, L.; Ding, N. Pseudorandom sequence generator based on the Chen chaotic system. Comput. Phys. Commun. 2013, 184, 765–768. [Google Scholar] [CrossRef]
- Guan, Z.H.; Huang, F.; Guan, W. Chaos-based image encryption algorithm. Phys. Lett. A 2005, 346, 153–157. [Google Scholar] [CrossRef]
- Antonelli, M.; De Micco, L.; Gonzalez, C.; Larrondo, H. Analysis of the digital implementation of a chaotic deterministic-stochastic attractor. In Proceedings of the 2012 Argentine School of Micro-Nanoelectronics, Technology and Applications (EAMTA), Córdoba, Argentina, 9–10 August 2012; pp. 73–78. [Google Scholar]
- Lynnyk, V.; Sakamoto, N.; Čelikovskỳ, S. Pseudo random number generator based on the generalized Lorenz chaotic system. IFAC-PapersOnLine 2015, 48, 257–261. [Google Scholar] [CrossRef]
- Rezk, A.A.; Madian, A.H.; Radwan, A.G.; Soliman, A.M. Multiplierless chaotic pseudo random number generators. AEU-Int. J. Electron. C 2020, 113, 152947. [Google Scholar] [CrossRef]
- Machicao, J.; Bruno, O.M. Improving the pseudo-randomness properties of chaotic maps using deep-zoom. Chaos Interdiscip. J. Nonlinear Sci. 2017, 27, 053116. [Google Scholar] [CrossRef]
- Ozkaynak, F. A novel random number generator based on fractional order chaotic Chua system. Elektron. ir Elektrotechnika 2020, 26, 52–57. [Google Scholar] [CrossRef]
- He, S.; Sun, K.; Wu, X. Fractional symbolic network entropy analysis for the fractional-order chaotic systems. Phys. Scr. 2020, 95, 035220. [Google Scholar] [CrossRef]
- Braun, M.; Golubitsky, M. Differential Equations and Their Applications; Springer: New York, NY, USA, 1983; Volume 1. [Google Scholar]
- Runge, C. Über die numerische Auflösung von Differentialgleichungen. Math. Ann. 1895, 46, 167–178. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Tong, X. Hyperchaotic system-based pseudorandom number generator. IET Inf. Secur. 2016, 10, 433–441. [Google Scholar] [CrossRef]
- Alawida, M.; Samsudin, A.; Teh, J.S. Enhancing unimodal digital chaotic maps through hybridisation. Nonlinear Dyn. 2019, 96, 601–613. [Google Scholar] [CrossRef]
- Murillo-Escobar, M.; Cruz-Hernández, C.; Cardoza-Avendaño, L.; Méndez-Ramírez, R. A novel pseudorandom number generator based on pseudorandomly enhanced logistic map. Nonlinear Dyn. 2017, 87, 407–425. [Google Scholar] [CrossRef]
- Rezk, A.A.; Madian, A.H.; Radwan, A.G.; Soliman, A.M. Reconfigurable chaotic pseudo random number generator based on FPGA. AEU-Int. J. Electron. C 2019, 98, 174–180. [Google Scholar] [CrossRef]
- Sprott, J.C. Chaos and Time-Series Analysis; Oxford University Press: Oxford, UK, 2003; Volume 69. [Google Scholar]
- Kantz, H.; Schreiber, T. Nonlinear Time Series Analysis; Cambridge University Press: Cambridge, UK, 2004; Volume 7. [Google Scholar]
- Strogatz, S.H. Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry, and Engineering; Westview Press: Boulder, CO, USA, 1994. [Google Scholar]
- Antonelli, M.; De Micco, L.; Larrondo, H. Measuring the jitter of ring oscillators by means of information theory quantifiers. Commun. Nonlinear. Sci. Numer. Simul. 2017, 43, 139–150. [Google Scholar] [CrossRef]
- Bandt, C.; Pompe, B. Permutation entropy: A natural complexity measure for time series. Phys. Rev. Lett. 2002, 88, 174102. [Google Scholar] [CrossRef]
- Rosso, O.A.; Larrondo, H.A.; Martín, M.T.; Plastino, A.; Fuentes, M.A. Distinguishing noise from chaos. Phys. Rev. Lett. 2007, 99, 154102. [Google Scholar] [CrossRef] [Green Version]
- De Micco, L.; Larrondo, H.A.; Plastino, A.; Rosso, O.A. Quantifiers for randomness of chaotic pseudo-random number generators. Philos.Trans. R. Soc. A 2009, 367, 3281–3296. [Google Scholar] [CrossRef]
- Wackerbauer, R.; Witt, A.; Atmanspacher, H.; Kurths, J.; Scheingraber, H. A comparative classification of complexity measures. Chaos Solitons Fractals 1994, 4, 133–173. [Google Scholar] [CrossRef]
- Lopez-Ruiz, R.; Mancini, H.L.; Calbet, X. A statistical measure of complexity. Phys. Lett. A 1995, 209, 321–326. [Google Scholar] [CrossRef] [Green Version]
- Lamberti, P.W.; Martín, M.T.; Plastino, A.; Rosso, O.A. Intensive entropic non-triviality measure. Phys. A Stat. Mech. Appl. 2004, 334, 119–131. [Google Scholar] [CrossRef]
- Rosso, O.A.; De Micco, L.; Larrondo, H.A.; Martín, M.T.; Plastino, A. Generalized statistical complexity measure. Int. J. Bifurc. Chaos 2010, 20, 775–785. [Google Scholar] [CrossRef]
- Antonelli, M.; De Micco, L.; Larrondo, H.; Rosso, O.A. Complexity of Simple, Switched and Skipped Chaotic Maps in Finite Precision. Entropy 2018, 20, 135. [Google Scholar] [CrossRef] [Green Version]
- Ribeiro, H.V.; Zunino, L.; Mendes, R.S.; Lenzi, E.K. Complexity–entropy causality plane: A useful approach for distinguishing songs. Phys. A Stat. Mech. Appl. 2012, 391, 2421–2428. [Google Scholar] [CrossRef] [Green Version]
- Zunino, L.; Ribeiro, H.V. Discriminating image textures with the multiscale two-dimensional complexity-entropy causality plane. Chaos Solitons Fractals 2016, 91, 679–688. [Google Scholar] [CrossRef] [Green Version]
- Rukhin, A.; Soto, J.; Nechvatal, J.; Smid, M.; Barker, E. A Statistical Test Suite for Random and Pseudorandom Number Generators for Cryptographic Applications; NIST: Gaithersburg, MD, USA, 2001. [Google Scholar]
- Rössler, O.E. An equation for continuous chaos. Phy. Lett. A 1976, 57, 397–398. [Google Scholar] [CrossRef]
- Sprott, J.C. Numerical Calculations of the Lyapunov Exponent. Available online: http://sprott.physics.wisc.edu/chaos/lyapexp.htm (accessed on 10 March 2020).
- Micco, L.D.; Antonelli, M.; Larrondo, H. Stochastic degradation of the fixed-point version of 2D-chaotic maps. Chaos Solitons Fractals 2017, 104, 477–484. [Google Scholar] [CrossRef]
- Lambić, D.; Nikolić, M. Pseudo-random number generator based on discrete-space chaotic map. Nonlinear Dyn. 2017, 90, 223–232. [Google Scholar] [CrossRef]
- de la Fraga, L.G.; Torres-Pérez, E.; Tlelo-Cuautle, E.; Mancillas-López, C. Hardware implementation of pseudo-random number generators based on chaotic maps. Nonlinear Dyn. 2017, 90, 1661–1670. [Google Scholar] [CrossRef]
- Teh, J.S.; Samsudin, A.; Al-Mazrooie, M.; Akhavan, A. GPUs and chaos: A new true random number generator. Nonlinear Dyn. 2015, 82, 1913–1922. [Google Scholar] [CrossRef]
- Chandrasekaran, S.; Amira, A. High performance FPGA implementation of the Mersenne Twister. In Proceedings of the 4th IEEE International Symposium on Electronic Design, Test and Applications, Hong Kong, China, 23–25 January 2008; pp. 482–485. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| wl | fl | ||
|---|---|---|---|
| 40 | 36 | fail | fail |
| 40 | 38 | fail | fail |
| 41 | 38 | fail | success |
| 42 | 38 | fail | success |
| 50 | 45 | fail | success |
| 51 | 45 | fail | success |
| 52 | 45 | fail | success |
| 53 | 45 | fail | success |
| 54 | 45 | fail | success |
| 55 | 50 | fail | success |
| 56 | 50 | success | success |
| Statistical Test | p_Value | Proportion | Result |
|---|---|---|---|
| Frequency | 0.060875 | 980/1000 | success |
| BlockFrequency | 0.000163 | 984/1000 | success |
| CumulativeSums | 0.008753 | 981/1000 | success |
| Runs | 0.002993 | 987/1000 | success |
| LongestRun | 0.141256 | 988/1000 | success |
| Rank | 0.961869 | 986/1000 | success |
| FFT | 0.424453 | 990/1000 | success |
| NonOverlappingTemplate | 0.697257 | 989/1000 | success |
| OverlappingTemplate | 0.319084 | 984/1000 | success |
| Universal | 0.116065 | 990/1000 | success |
| ApproximateEntropy | 0.894918 | 991/1000 | success |
| RandomExcursions | 0.330947 | 603/611 | success |
| RandomExcursionsVariant | 0.401777 | 599/611 | success |
| Serial | 0.205531 | 986/1000 | success |
| LinearComplexity | 0.971006 | 988/1000 | success |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Micco, L.; Antonelli, M.; Rosso, O.A. From Continuous-Time Chaotic Systems to Pseudo Random Number Generators: Analysis and Generalized Methodology. Entropy 2021, 23, 671. https://doi.org/10.3390/e23060671
De Micco L, Antonelli M, Rosso OA. From Continuous-Time Chaotic Systems to Pseudo Random Number Generators: Analysis and Generalized Methodology. Entropy. 2021; 23(6):671. https://doi.org/10.3390/e23060671
Chicago/Turabian StyleDe Micco, Luciana, Maximiliano Antonelli, and Osvaldo Anibal Rosso. 2021. "From Continuous-Time Chaotic Systems to Pseudo Random Number Generators: Analysis and Generalized Methodology" Entropy 23, no. 6: 671. https://doi.org/10.3390/e23060671