
A Hidden Chaotic System with Multiple Attractors


Abstract
:1. Introduction
2. System Descriptions
2.1. The Description of the New System’s Mathematical Model
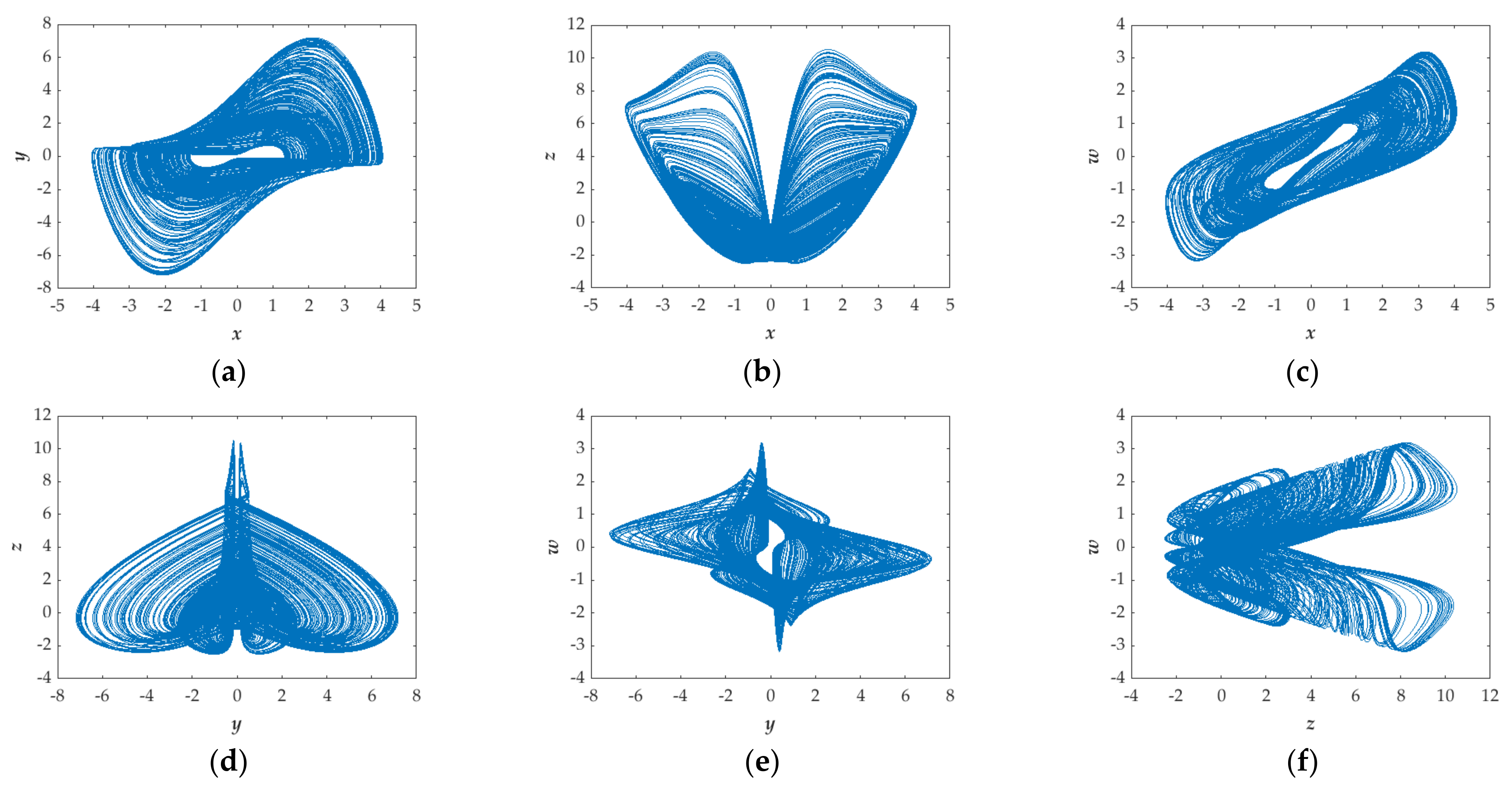
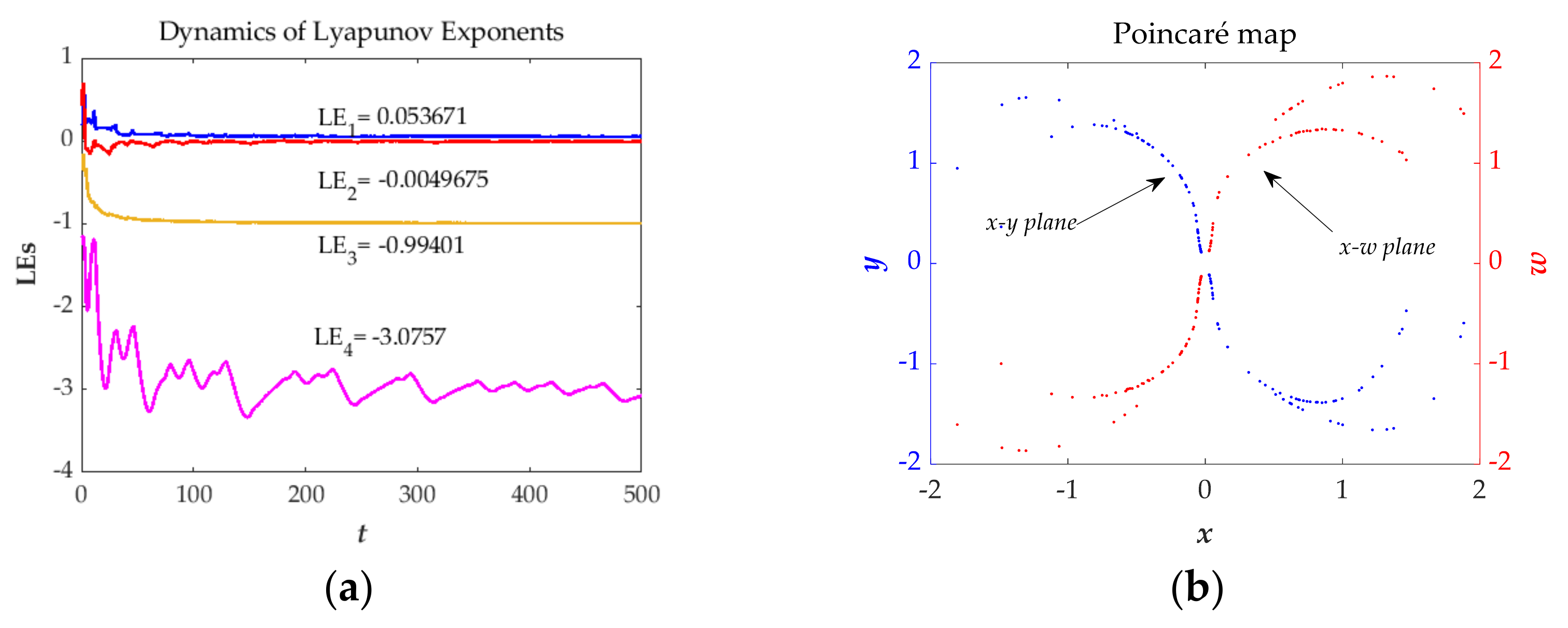
2.2. Description of Chaotic Behavior
3. Dynamical Properties of the System
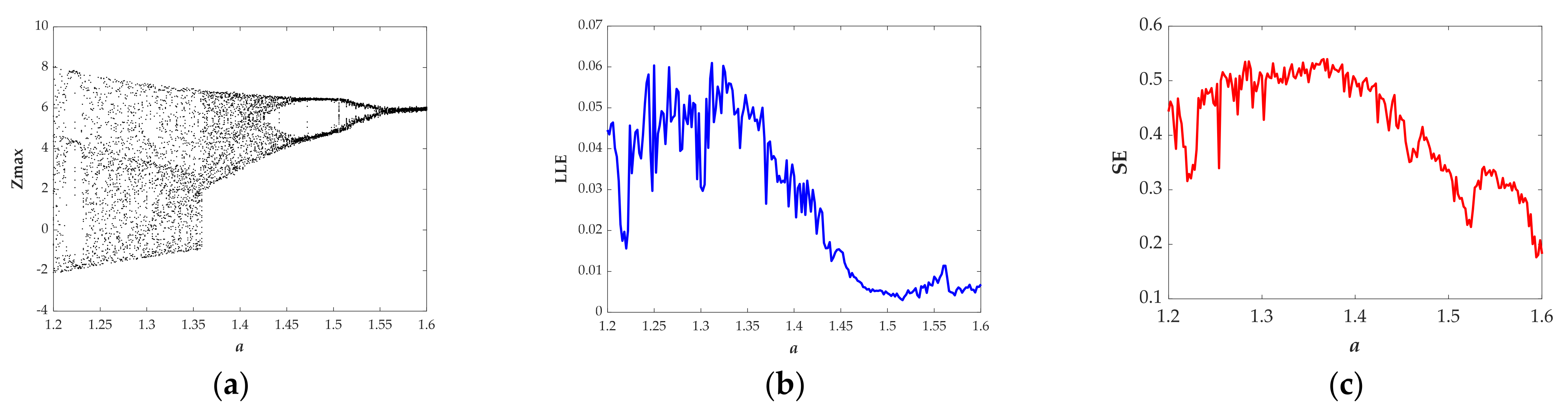
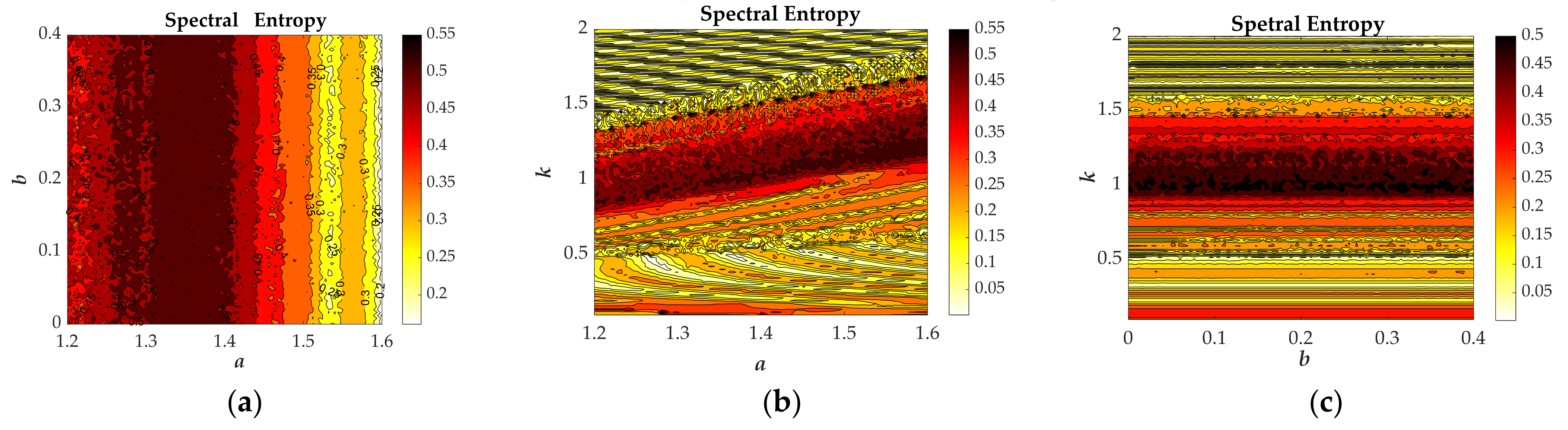
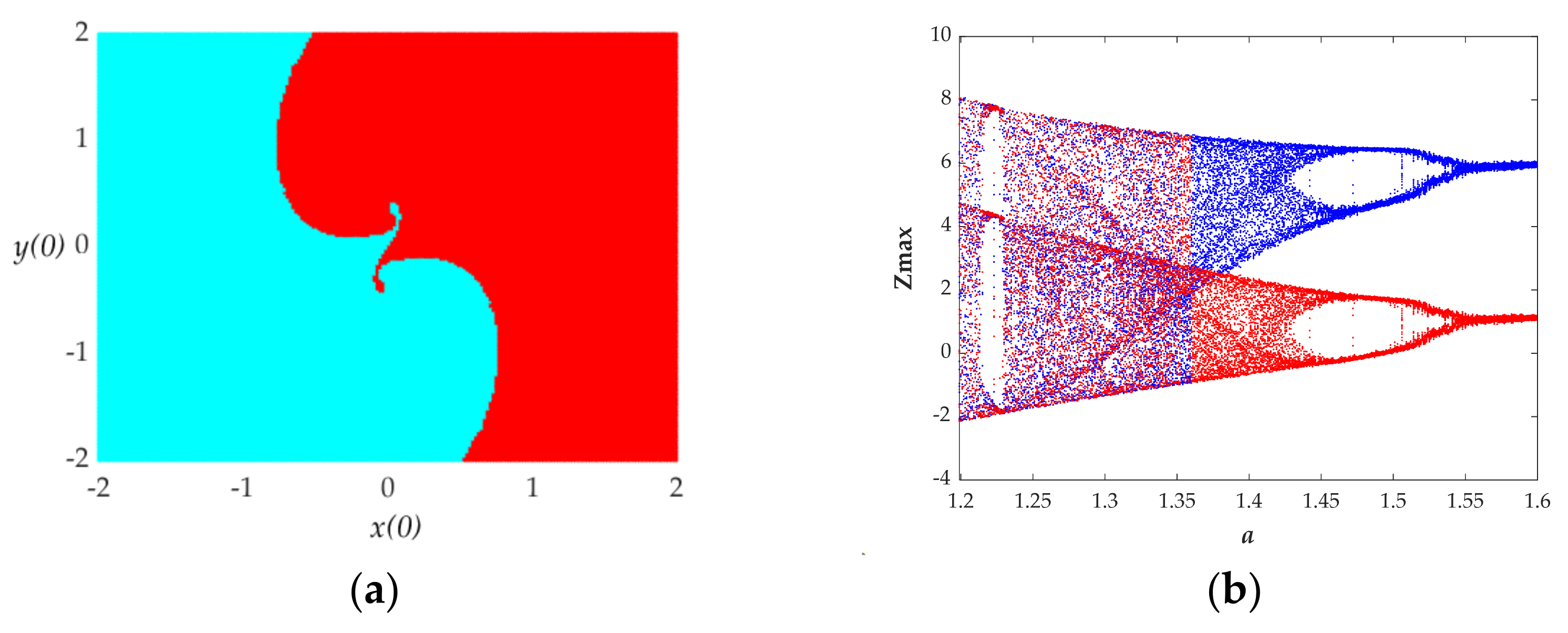
3.1. The Impacts of Parameters
3.2. Coexistence of Hidden Attractor
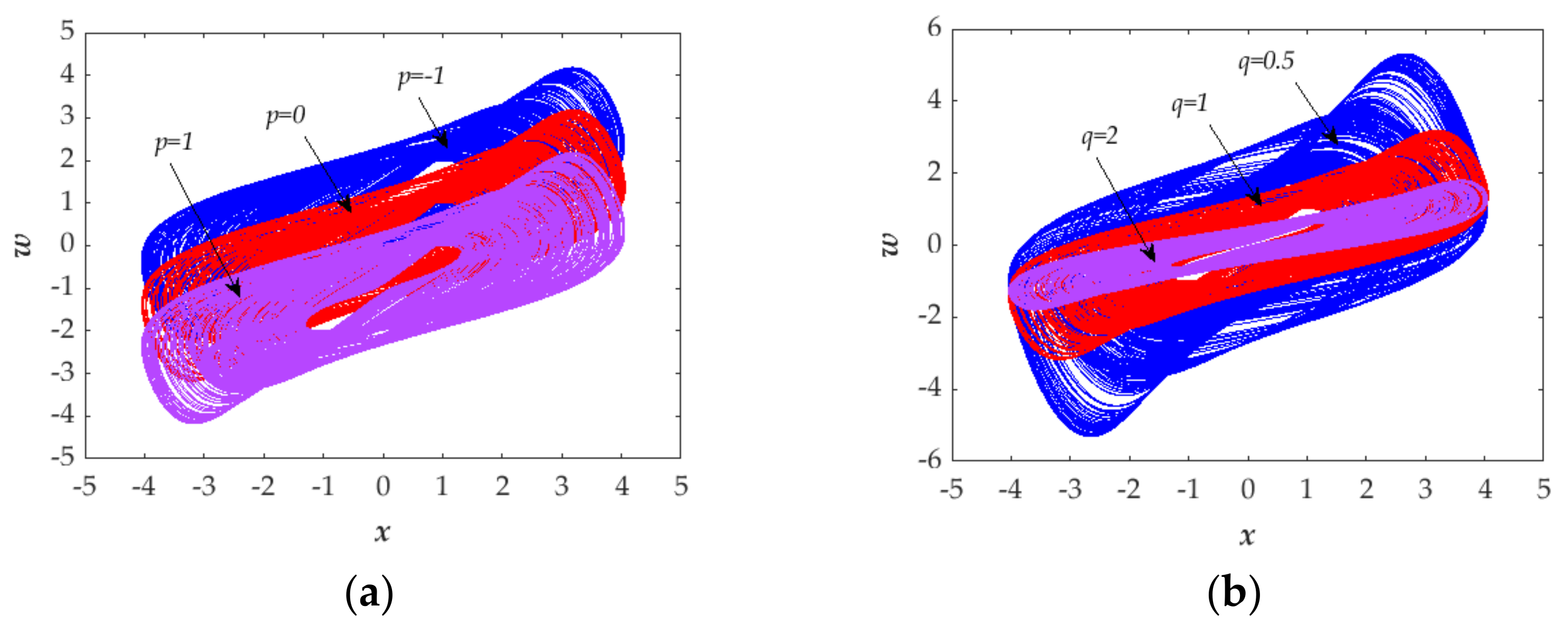
3.3. Controllability of Attractor
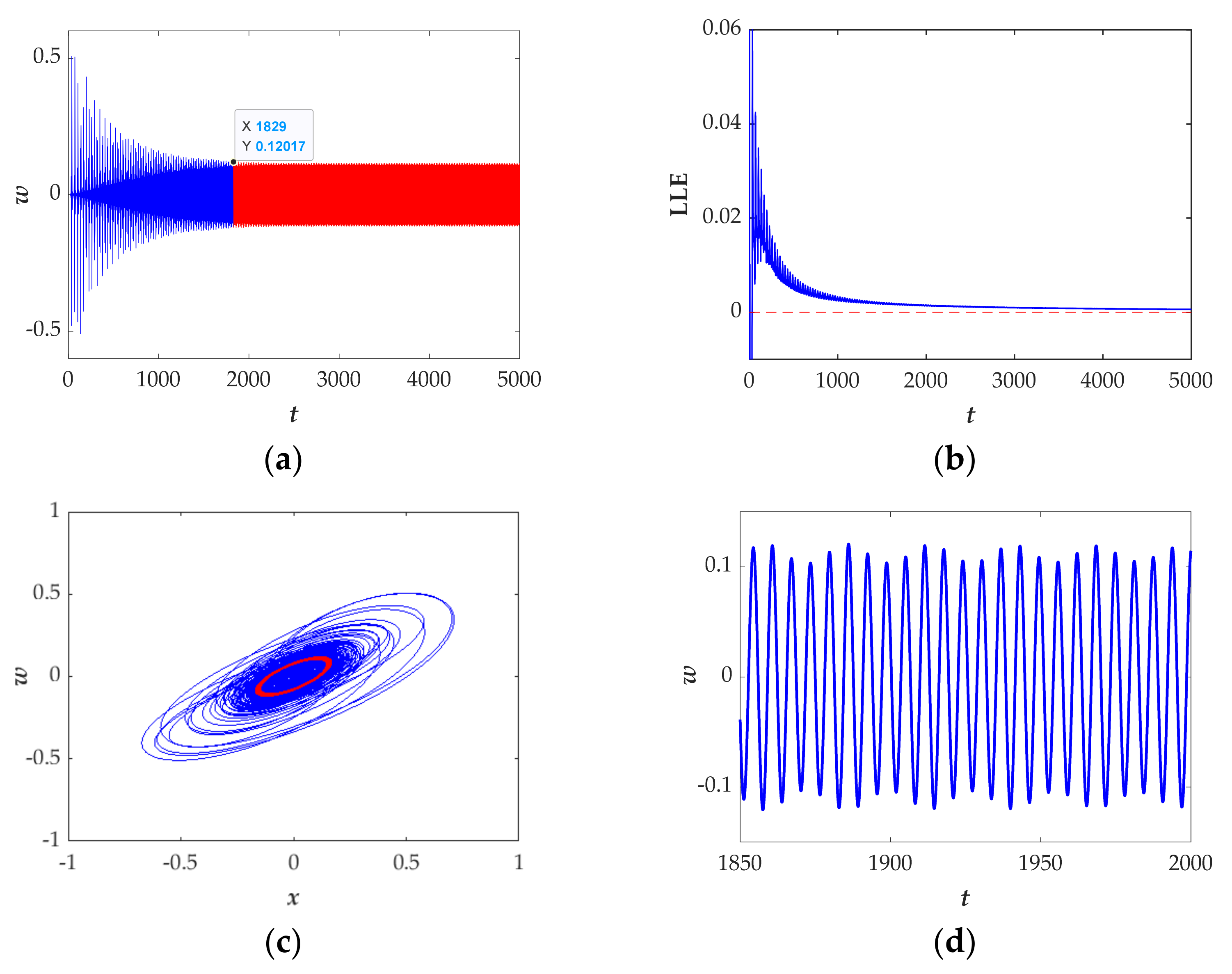
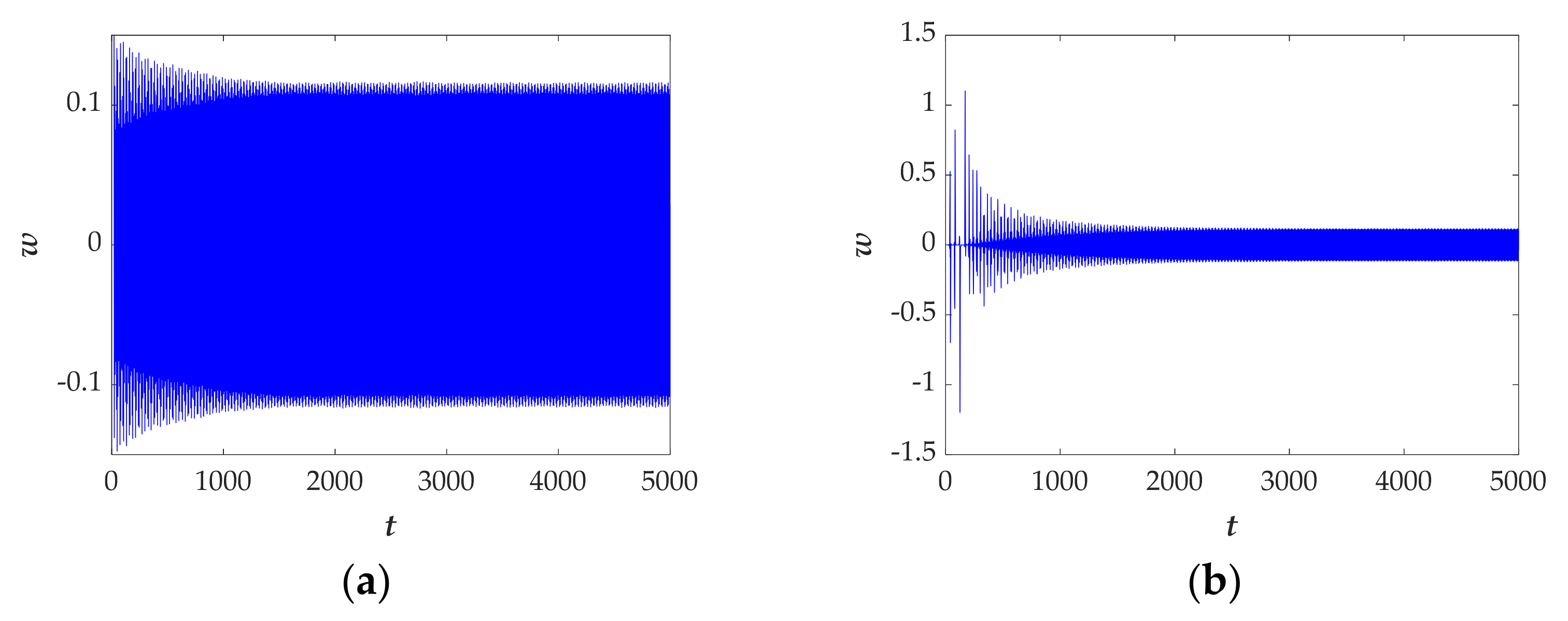
3.4. Transient Behaviour
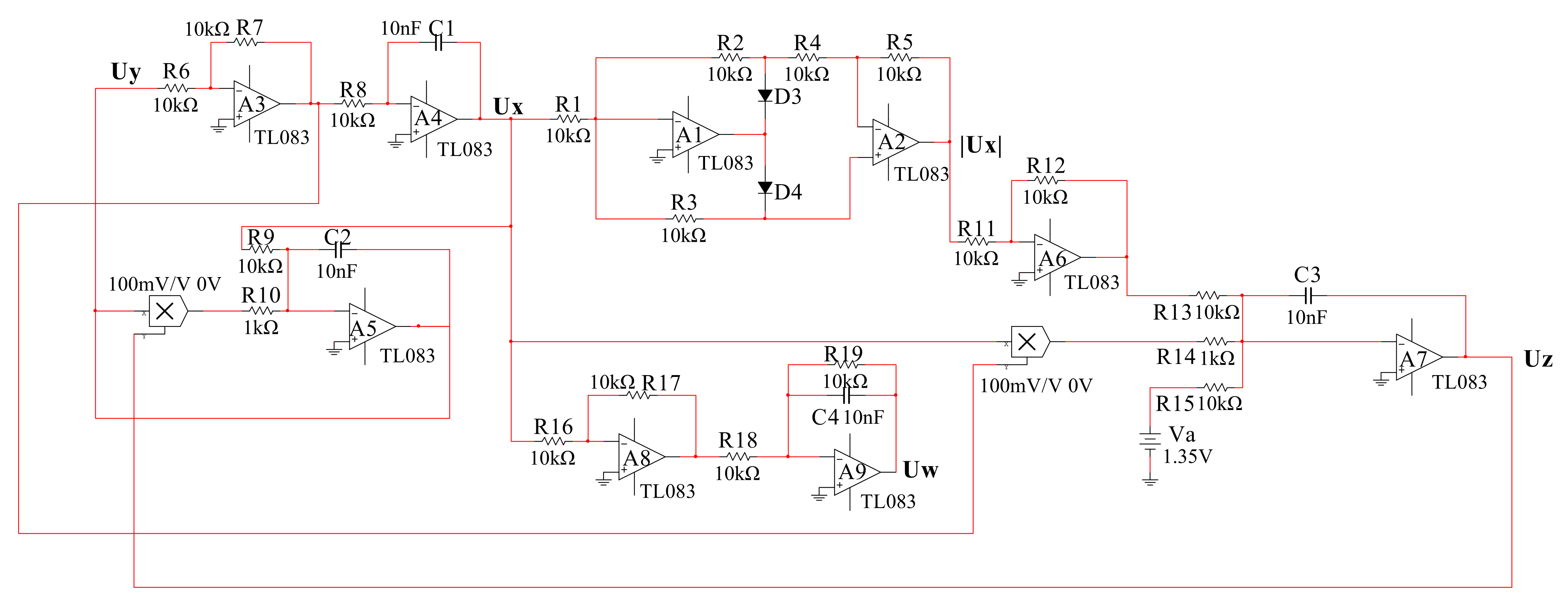
4. Circuit Design
4.1. Improved Modular Circuit Design
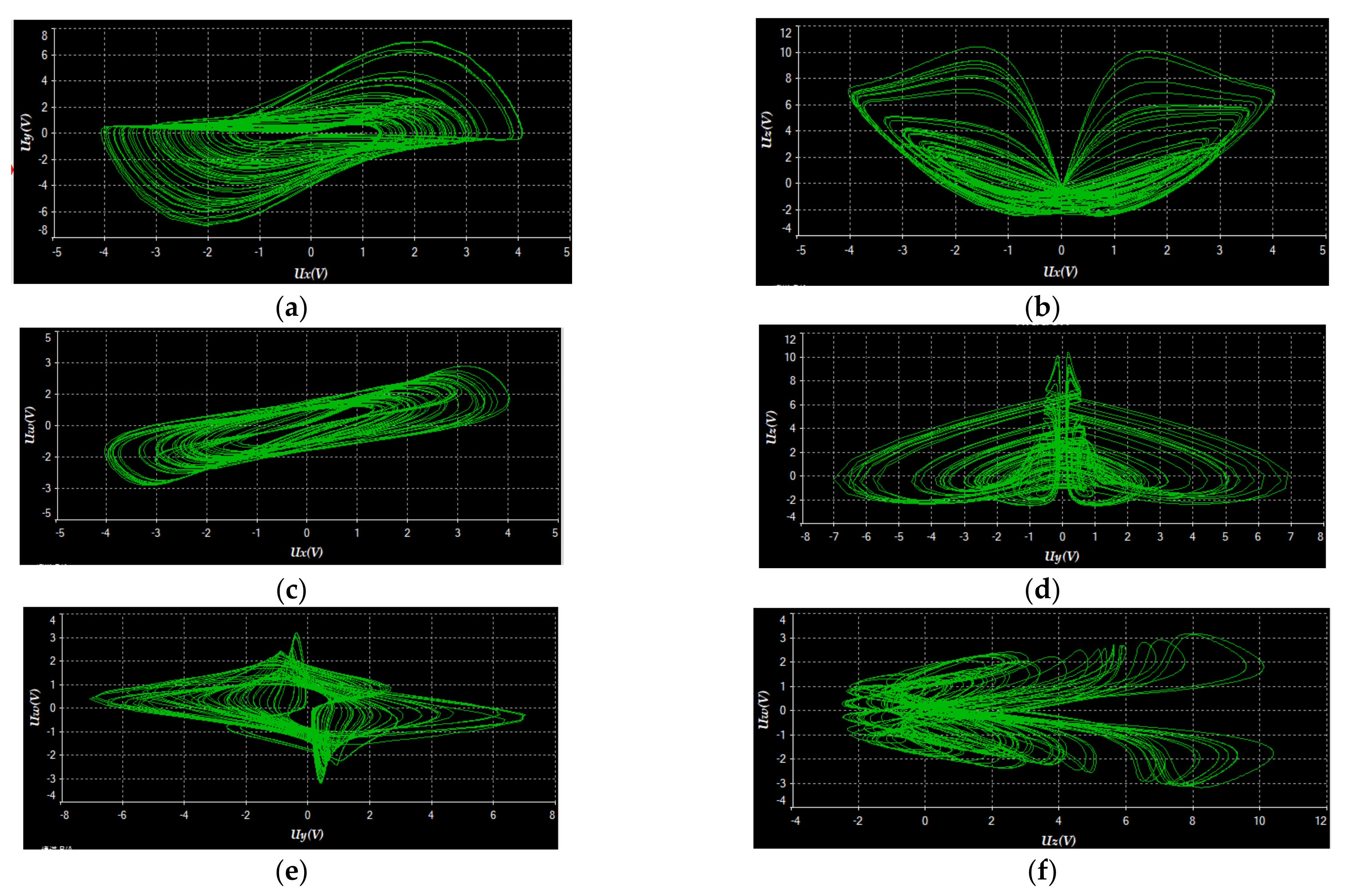
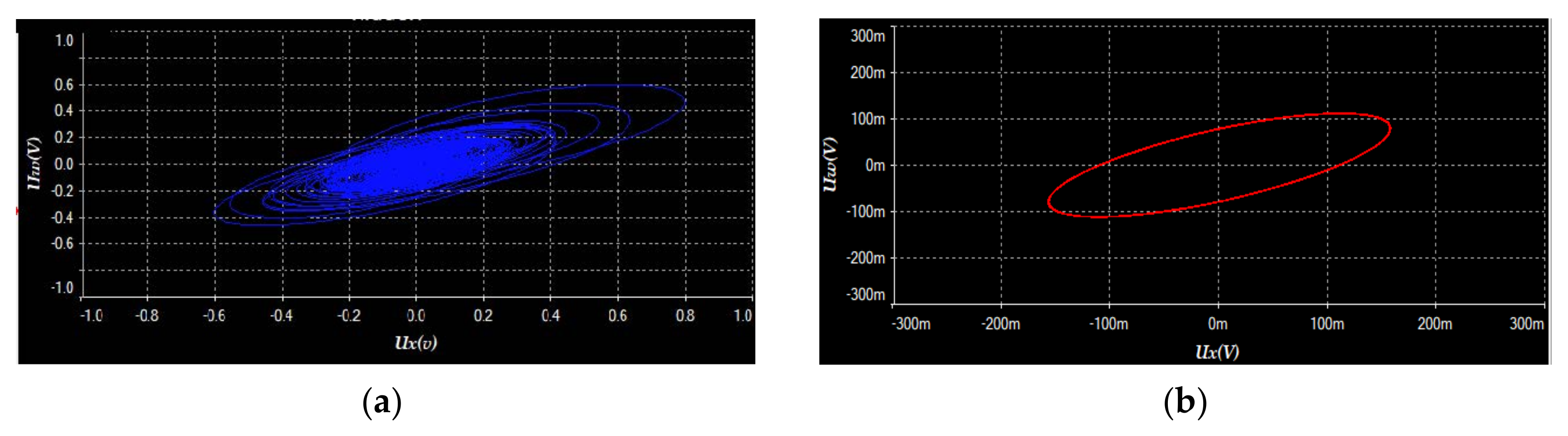
4.2. Multisim Results
5. Conclusions
6. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dudkowski, D.; Jafari, S.; Kapitaniak, T.; Kuznetsov, N.V.; Leonov, G.A.; Prasad, A. Hidden Attractors in Dynamical Systems. Phys. Rep. 2016, 637, 1–50. [Google Scholar] [CrossRef]
- Kuznetsov, N.V.; Leonov, G.A.; Vagaitsev, V.I. Analytical-Numerical Method for Attractor Localization of Generalized Chua’s System. IFAC Proc. Vol. 2010, 43, 29–33. [Google Scholar] [CrossRef]
- Golmankhaneh, A.K.; Arefi, R.; Baleanu, D. The Proposed Modified Liu System with Fractional Order. Adv. Math. Phys. 2013, 2013, 1–6. [Google Scholar] [CrossRef]
- Wang, C.; Ding, Q. A New Two-Dimensional Map with Hidden Attractors. Entropy 2018, 20, 322. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Munoz-Pacheco, J.M.; Zambrano-Serrano, E.; Volos, C.; Jafari, S.; Kengne, J.; Rajagopal, K. A New Fractional-Order Chaotic System with Different Families of Hidden and Self-Excited Attractors. Entropy 2018, 20, 564. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pham, V.-T.; Jafari, S.; Kapitaniak, T.; Volos, C.; Kingni, S.T. Generating a Chaotic System with One Stable Equilibrium. Int. J. Bifurc. Chaos 2017, 27, 1750053. [Google Scholar] [CrossRef]
- Wang, X.; Chen, G. A Chaotic System with Only One Stable Equilibrium. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 1264–1272. [Google Scholar] [CrossRef] [Green Version]
- Bao, B.C.; Li, Q.D.; Wang, N.; Xu, Q. Multistability in Chua’s Circuit with Two Stable Node-Foci. Chaos 2016, 26, 043111. [Google Scholar] [CrossRef]
- Barati, K.; Jafari, S.; Sprott, J.C.; Pham, V.-T. Simple Chaotic Flows with a Curve of Equilibria. Int. J. Bifurc. Chaos 2016, 26, 1630034. [Google Scholar] [CrossRef]
- Jafari, S.; Sprott, J.C. Simple Chaotic Flows with a Line Equilibrium. Chaos Solitons Fractals 2013, 57, 79–84. [Google Scholar] [CrossRef]
- Jafari, S.; Sprott, J.C.; Molaie, M. A Simple Chaotic Flow with a Plane of Equilibria. Int. J. Bifurc. Chaos 2016, 26, 1650098. [Google Scholar] [CrossRef]
- Feng, Y.; Pan, W. Hidden Attractors without Equilibrium and Adaptive Reduced-Order Function Projective Synchronization from Hyperchaotic Rikitake System. Pramana J. Phys 2017, 88, 62. [Google Scholar] [CrossRef]
- Pham, V.-T.; Volos, C.; Jafari, S.; Kapitaniak, T. Coexistence of Hidden Chaotic Attractors in a Novel No-Equilibrium System. Nonlinear Dyn. 2017, 87, 2001–2010. [Google Scholar] [CrossRef]
- Jafari, S.; Pham, V.-T.; Kapitaniak, T. Multiscroll Chaotic Sea Obtained from a Simple 3D System Without Equilibrium. Int. J. Bifurc. Chaos 2016, 26, 1650031. [Google Scholar] [CrossRef]
- Yang, T. Multistability and Hidden Attractors in a Three-Dimensional Chaotic System. Int. J. Bifurc. Chaos 2020, 30, 2050087. [Google Scholar] [CrossRef]
- Rajagopal, K.; Akgul, A.; Pham, V.-T.; Alsaadi, F.E.; Nazarimehr, F.; Alsaadi, F.E.; Jafari, S. Multistability and Coexisting Attractors in a New Circulant Chaotic System. Int. J. Bifurc. Chaos 2019, 29, 1950174. [Google Scholar] [CrossRef]
- Varshney, V.; Sabarathinam, S.; Prasad, A.; Thamilmaran, K. Infinite Number of Hidden Attractors in Memristor-Based Autonomous Duffing Oscillator. Int. J. Bifurc. Chaos 2018, 28, 1850013. [Google Scholar] [CrossRef]
- Li, C.; Hu, W.; Sprott, J.C.; Wang, X. Multistability in Symmetric Chaotic Systems. Eur. Phys. J. Spec. Top. 2015, 224, 1493–1506. [Google Scholar] [CrossRef]
- Kengne, J.; Njitacke, Z.T.; Fotsin, H.B. Dynamical Analysis of a Simple Autonomous Jerk System with Multiple Attractors. Nonlinear Dyn. 2016, 83, 751–765. [Google Scholar] [CrossRef]
- Ma, X.; Mou, J.; Liu, J.; Ma, C.; Yang, F.; Zhao, X. A Novel Simple Chaotic Circuit Based on Memristor–Memcapacitor. Nonlinear Dyn. 2020, 100, 2859–2876. [Google Scholar] [CrossRef]
- Liu, L.; Du, C.; Liang, L.; Zhang, X. A High Spectral Entropy (SE) Memristive Hidden Chaotic System with Multi-Type Quasi-Periodic and Its Circuit. Entropy 2019, 21, 1026. [Google Scholar] [CrossRef] [Green Version]
- Du, C.; Liu, L.; Shi, S.; Wei, Y. Multiple Transient Transitions Behavior Analysis of a Double Memristor’s Hidden System and Its Circuit. IEEE Access 2020, 8, 76642–76656. [Google Scholar] [CrossRef]
- Donati, S.; Hwang, S.-K. Chaos and High-Level Dynamics in Coupled Lasers and Their Applications. Prog. Quantum Electron. 2012, 36, 293–341. [Google Scholar] [CrossRef]
- Fotsin, H.B.; Daafouz, J. Adaptive Synchronization of Uncertain Chaotic Colpitts Oscillators Based on Parameter Identification. Phys. Lett. A 2005, 339, 304–315. [Google Scholar] [CrossRef]
- Nehmzow, U.; Walker, K. Quantitative Description of Robot–Environment Interaction Using Chaos Theory. Robot. Auton. Syst. 2005, 53, 177–193. [Google Scholar] [CrossRef]
- Volos, C.K.; Kyprianidis, I.M.; Stouboulos, I.N. Experimental Investigation on Coverage Performance of a Chaotic Autonomous Mobile Robot. Robot. Auton. Syst. 2013, 61, 1314–1322. [Google Scholar] [CrossRef]
- Luo, C.; Wang, X. Chaos Generated from the Fractional-Order Complex Chen System and Its Application to Digital Secure Communication. Int. J. Mod. Phys. C 2013, 24, 1350025. [Google Scholar] [CrossRef]
- Cairone, F.; Anandan, P.; Bucolo, M. Nonlinear Systems Synchronization for Modeling Two-Phase Microfluidics Flows. Nonlinear Dyn. 2018, 92, 75–84. [Google Scholar] [CrossRef]
- Caraiani, P. Testing for Nonlinearity and Chaos in Economic Time Series with Noise Titration. Econ. Lett. 2013, 120, 192–194. [Google Scholar] [CrossRef]
- Guégan, D. Chaos in Economics and Finance. Annu. Rev. Control 2009, 33, 89–93. [Google Scholar] [CrossRef] [Green Version]
- Zolfaghari-Nejad, M.; Hassanpoor, H.; Charmi, M. Numerical Analysis of a Novel 3D Chaotic System with Period-Subtracting Structures. Int. J. Bifurc. Chaos 2021, 31, 2150169. [Google Scholar] [CrossRef]
- Wang, M.; Liao, X.; Deng, Y.; Li, Z.; Su, Y.; Zeng, Y. Dynamics, Synchronization and Circuit Implementation of a Simple Fractional-Order Chaotic System with Hidden Attractors. Chaos Solitons Fractals 2020, 130, 109406. [Google Scholar] [CrossRef]
- Zhang, X.; Tian, Z.; Li, J.; Cui, Z. A Simple Parallel Chaotic Circuit Based on Memristor. Entropy 2021, 23, 719. [Google Scholar] [CrossRef] [PubMed]
- Xiong, P.-Y.; Jahanshahi, H.; Alcaraz, R.; Chu, Y.-M.; Gómez-Aguilar, J.F.; Alsaadi, F.E. Spectral Entropy Analysis and Synchronization of a Multi-Stable Fractional-Order Chaotic System Using a Novel Neural Network-Based Chattering-Free Sliding Mode Technique. Chaos Solitons Fractals 2021, 144, 110576. [Google Scholar] [CrossRef]
- Ma, C.; Mou, J.; Xiong, L.; Banerjee, S.; Liu, T.; Han, X. Dynamical Analysis of a New Chaotic System: Asymmetric Multistability, Offset Boosting Control and Circuit Realization. Nonlinear Dyn. 2021, 103, 2867–2880. [Google Scholar] [CrossRef]
- Bucolo, M.; Buscarino, A.; Famoso, C.; Fortuna, L.; Gagliano, S. Imperfections in Integrated Devices Allow the Emergence of Unexpected Strange Attractors in Electronic Circuits. IEEE Access 2021, 9, 29573–29583. [Google Scholar] [CrossRef]
- Wolf, A.; Swift, J.B.; Swinney, H.L.; Vastano, J.A. Determining Lyapunov Exponents from a Time Series. Phys. D Nonlinear Phenom. 1985, 16, 285–317. [Google Scholar] [CrossRef] [Green Version]
- Holmes, P. Poincaré, Celestial Mechanics, Dynamical-Systems Theory and “Chaos”. Phys. Rep. 1990, 193, 137–163. [Google Scholar] [CrossRef]
- Lauritzen, B. Semiclassical Poincaré Map for Integrable Systems. Chaos 1992, 2, 409. [Google Scholar] [CrossRef]
- Kuznetsov, A.P.; Kuznetsov, S.P.; Mosekilde, E.; Stankevich, N.V. Co-Existing Hidden Attractors in a Radio-Physical Oscillator System. J. Phys. A Math. Theor. 2015, 48, 125101. [Google Scholar] [CrossRef]
- Malek, B.; Miri, A. Chaotic Masking for Securing RFID Systems against Relay Attacks. Secur. Commun. Netw. 2013, 6, 1496–1508. [Google Scholar] [CrossRef]
- Zhang, Y.-Q.; Wang, X.-Y. A New Image Encryption Algorithm Based on Non-Adjacent Coupled Map Lattices. Appl. Soft Comput. 2015, 26, 10–20. [Google Scholar] [CrossRef]
- Zhang, Y.-Q.; Wang, X.-Y. Spatiotemporal Chaos in Mixed Linear–Nonlinear Coupled Logistic Map Lattice. Phys. A Stat. Mech. Its Appl. 2014, 402, 104–118. [Google Scholar] [CrossRef]
- Tutueva, A.V.; Karimov, T.I.; Nepomuceno, E.G.; Butusov, D.N. Detection of Hidden Oscillations in Systems Without Equilibrium. Int. J. Bifurc. Chaos 2021, 31, 2150043. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Range | State | Average Value of SE | Attractor Type | Corresponding Figure |
|---|---|---|---|---|
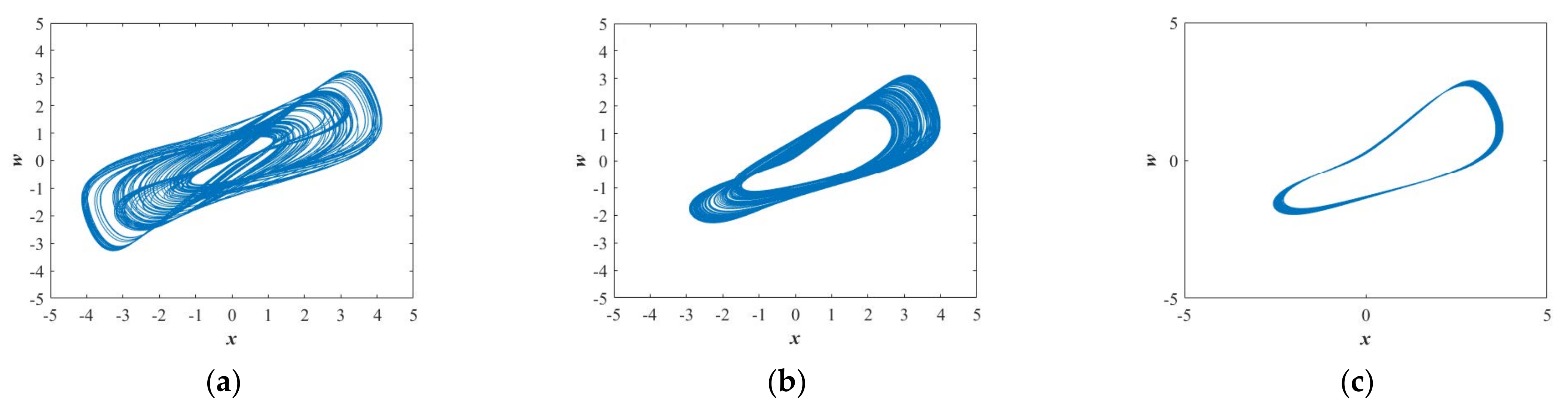
| a∈[1.23–1.35] | chaos | 0.493 | Ⅰ | Figure 4a |
| a∈[1.36–1.43] | chaos | 0.502 | Ⅱ | Figure 4b |
| a∈[1.55–1.6] | quasi-period | 0.272 | Ⅲ | Figure 4c |
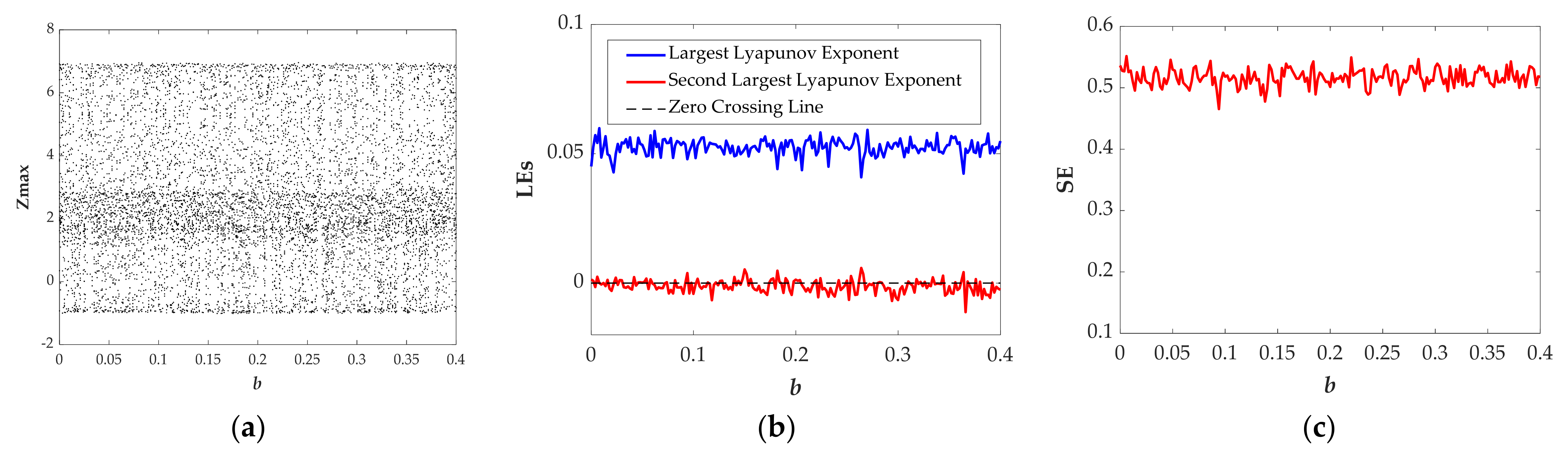
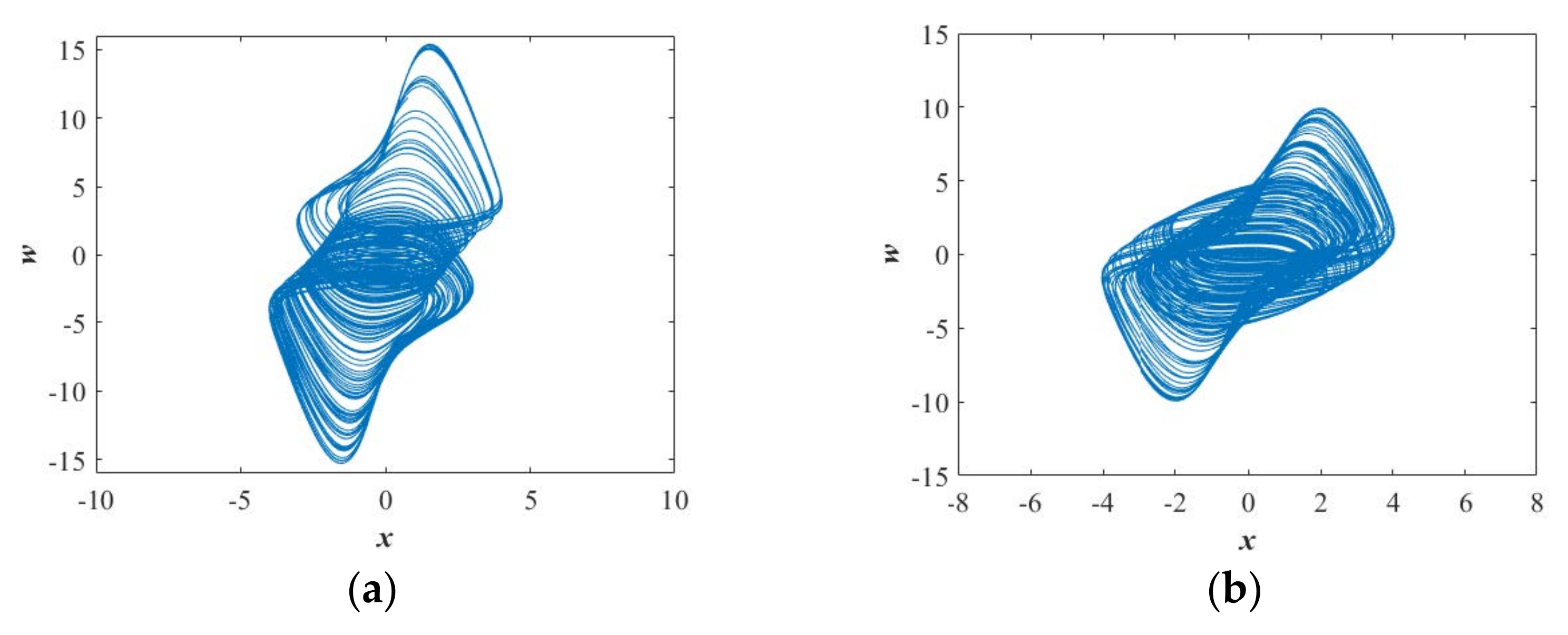
| b∈[0.06–0.16] | chaos | 0.513 | Ⅳ | Figure 6a |
| b∈[0.17–0.40] | chaos | 0.518 | Ⅴ | Figure 6b |
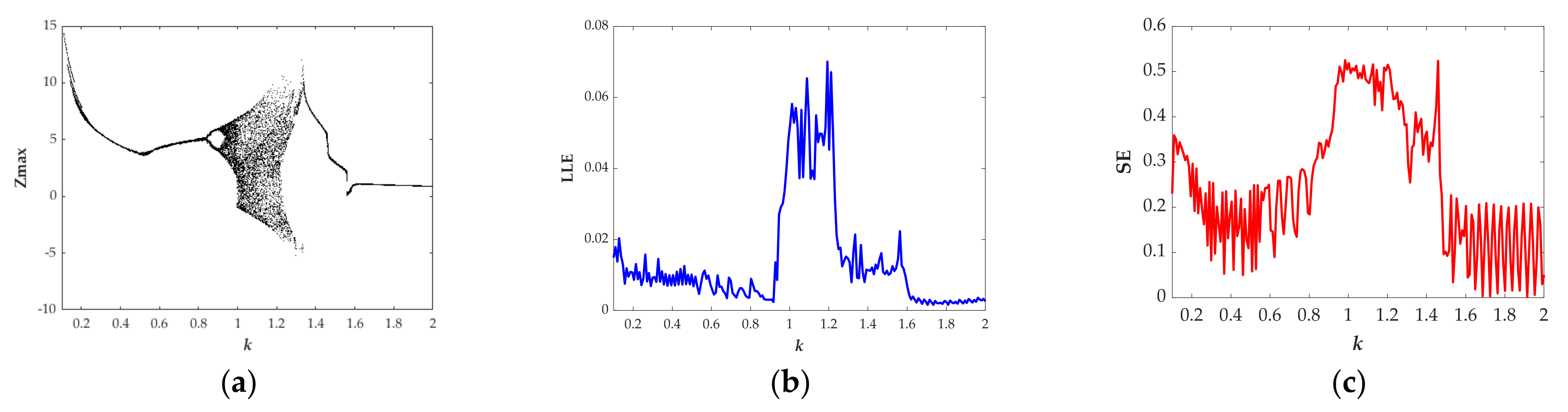
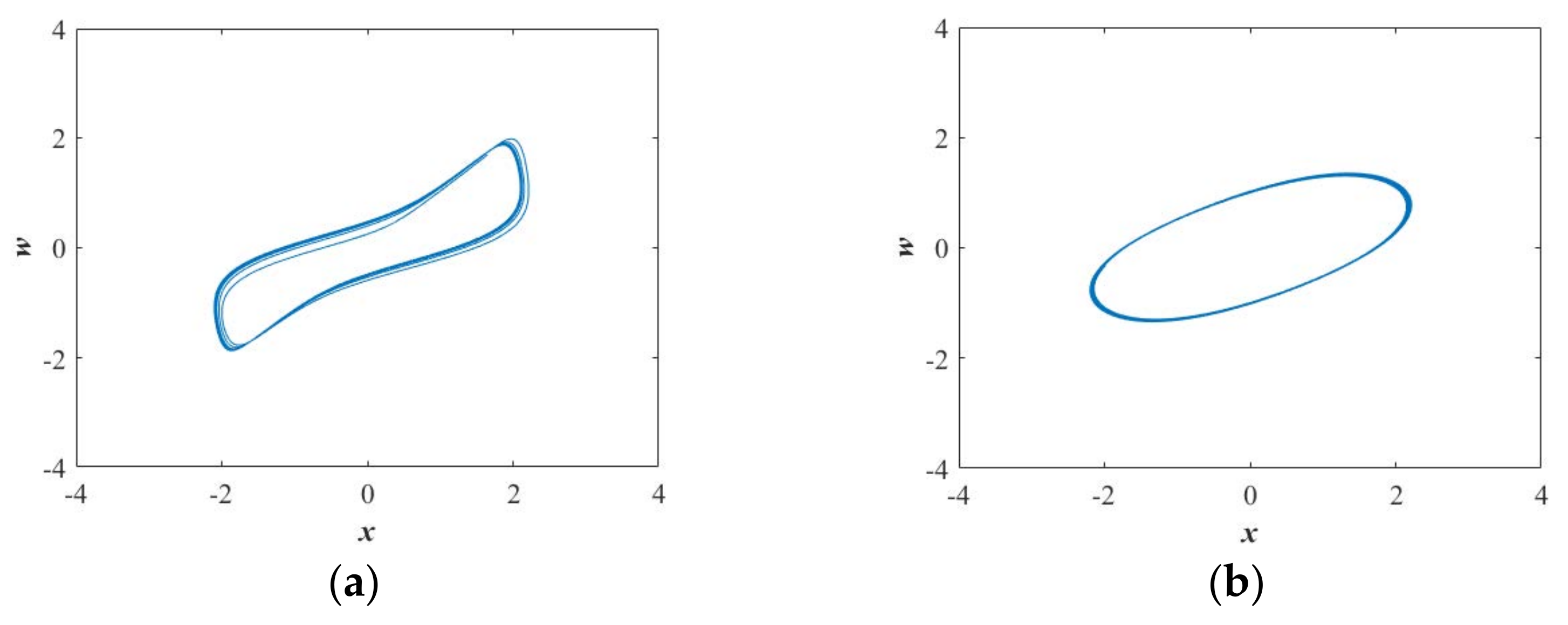
| k∈[0.10–0.52] | quasi-period | 0.208 | Ⅵ | Figure 8a |
| k∈[1.65–2.00] | period | 0.111 | Ⅶ | Figure 8b |
| Algorithm | a (s) | b (s) | k (s) |
|---|---|---|---|
| LLE | 1384.948954 | 1383.054144 | 1353.828976 |
| SE | 8.153505 | 7.886318 | 9.132727 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Tian, Z.; Li, J.; Wu, X.; Cui, Z. A Hidden Chaotic System with Multiple Attractors. Entropy 2021, 23, 1341. https://doi.org/10.3390/e23101341
Zhang X, Tian Z, Li J, Wu X, Cui Z. A Hidden Chaotic System with Multiple Attractors. Entropy. 2021; 23(10):1341. https://doi.org/10.3390/e23101341
Chicago/Turabian StyleZhang, Xiefu, Zean Tian, Jian Li, Xianming Wu, and Zhongwei Cui. 2021. "A Hidden Chaotic System with Multiple Attractors" Entropy 23, no. 10: 1341. https://doi.org/10.3390/e23101341