Segmentation Method for Ship-Radiated Noise Using the Generalized Likelihood Ratio Test on an Ordinal Pattern Distribution

Abstract
:1. Introduction
- The SRN consists of a variety of components, including propeller noise, hydrodynamic noise, and noise from various mechanical parts radiated into the water through the hull [1].
- The traits of the SRN relate to the propulsion devices and operating states (entering or departing a port, waiting for boarding) of ships.
- The SRN varies while the ship is sailing nearby the hydrophone because the near field sound around the ship is not isotropic [2].
- As the absorption coefficient changes with the distance between the hydrophone and the sound source [3], the proportion of the high-frequency and low-frequency in the SRN spectrum shifts when a ship is approaching or leaving.
2. Materials and Methodology
2.1. Problem Formulation and Motivations
- Different from the traditional acoustic feature extraction, ordinal patterns are computed efficiently on the waveform of the signal, which supports a higher temporal resolution of change-point detection.
- As a discrete probability distribution, the estimation of OPD is more convenient and straightforward than the probability distribution estimation in the traditional segmentation method, which requires the pre-change and post-change probability distributions to be known and has high computational cost.
- Because nonlinear drift or amplitude scaling does not change the ordinal pattern [23], the variations in the amplitude of the SRN have little impact on the OPD. Therefore, OPD based segmentation reduces the performance deterioration when the distance and direction between the hydrophone and the ship are changing.
2.2. Efficient Estimation of Ordinal Pattern Distribution
2.3. Proposed Criterion for Single Change-Point Detection
2.4. Computation-Efficient Multiple Change-Points Detection with a Variable Window
| Algorithm 1 MCPD with a variable window |
| Require: |
3. Results and Discussion
3.1. Segmentation of the Synthetic Signal
3.1.1. Single Change-Point Detection
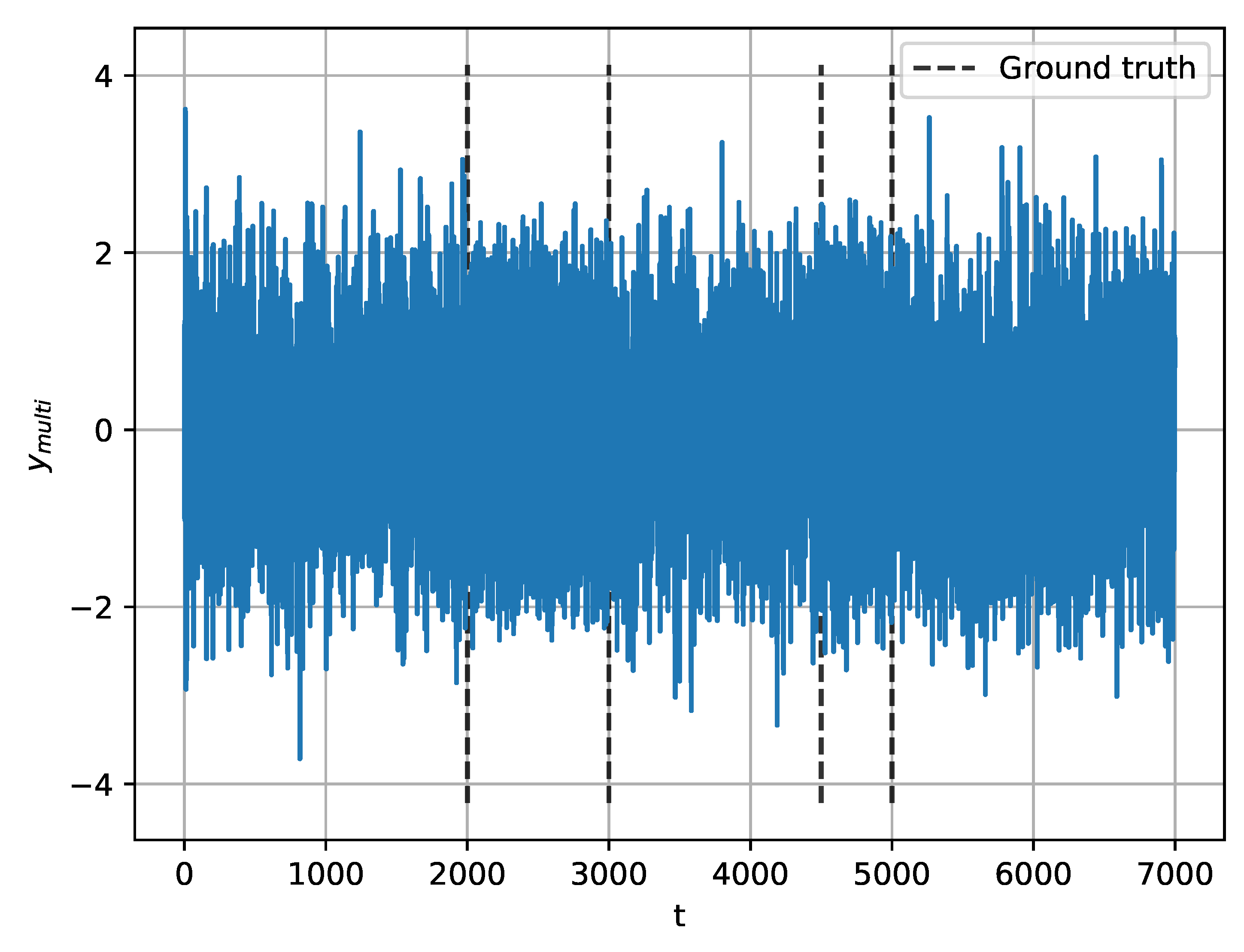
3.1.2. Multiple Change-Points Detection
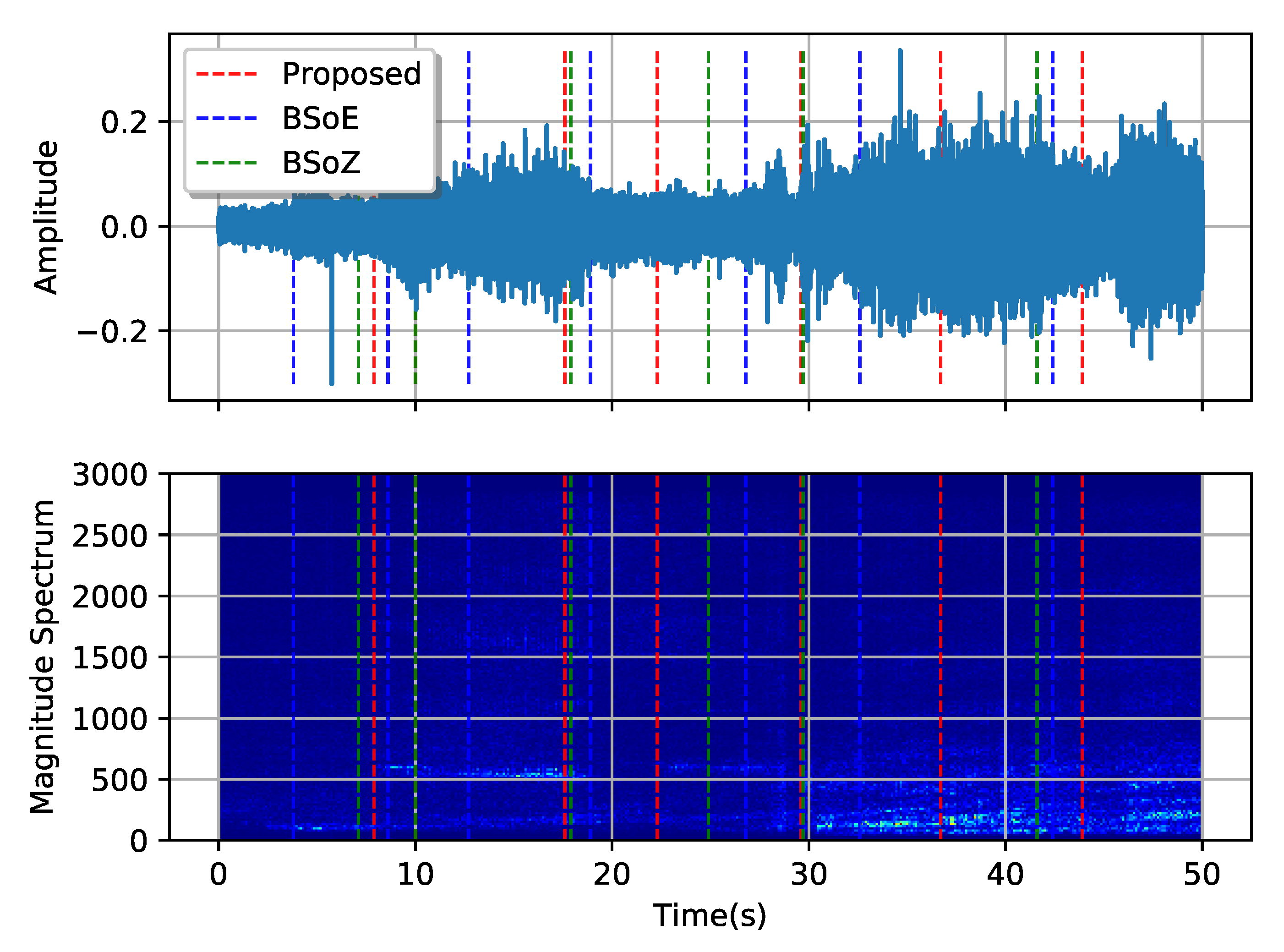
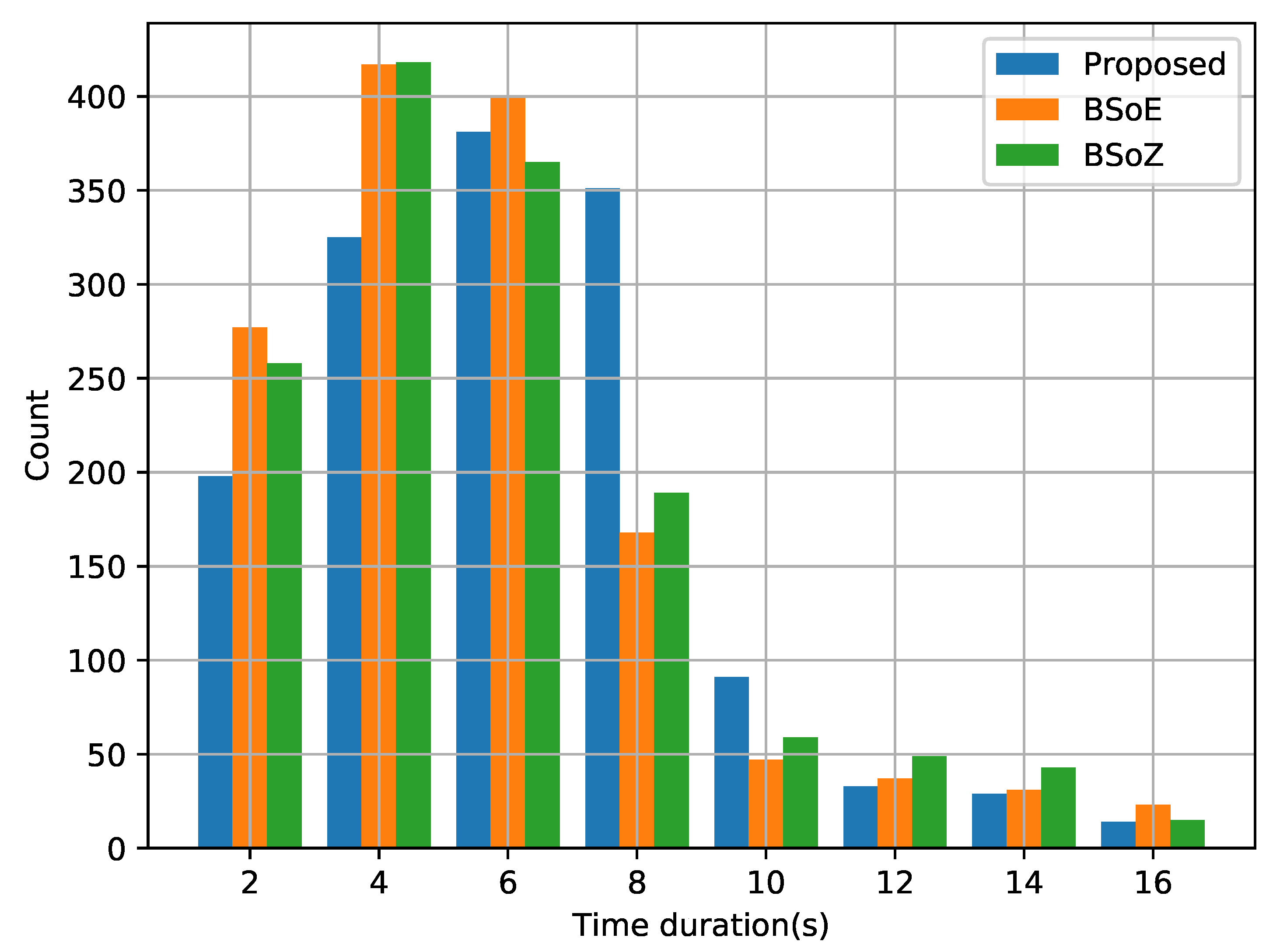
3.2. Real-World Application on Ship-Radiated Noise
4. Conclusions
- Using OPD as the basis for segmentation, the proposed method is free from the acoustic feature extraction and the corresponding joint probability distribution estimation.
- As the ordinal pattern is insensitive to nonlinear drift or amplitude scaling, the proposed method reduces the number of false change-points caused by the changing distance between the ship and the hydrophone.
- The proposed segmentation method achieves a high temporal resolution as the original pattern is calculated directly from a few data points on the signal waveform.
- According to the sequential structure of ordinal patterns, the proposed method can efficiently estimate the OPD on a series of analysis windows, which make it applicable to real-world SRN segmentation where a large amount of data are processed.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| BIC | Bayesian information criterion |
| BSoE | BIC based segmentation on energy |
| BSoZ | BIC based segmentation on zero-crossing rate |
| GLR | Generalized likelihood ratio |
| MCPD | Multiple change-points detection |
| MFCC | Mel-frequency cepstrum coefficient |
| OPD | Ordinal pattern distribution |
| RF | Random forest |
| SCPD | Single change-point detection |
| SRN | Ship-radiated noise |
| SVC | Support vector classifier |
| ZCR | Zero-crossing rate |
References
- McKenna, M.F.; Ross, D.; Wiggins, S.M.; Hildebrand, J.A. Underwater Radiated Noise from Modern Commercial Ships. J. Acousti. Soc. Am. 2012, 131, 92–103. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gassmann, M.; Wiggins, S.M.; Hildebrand, J.A. Underwater Sound Directionality of Commercial Ships. J. Acousti. Soc. Am. 2016, 139, 2147. [Google Scholar] [CrossRef]
- Xu, L.; Xu, T. Digital Underwater Acoustic Communications; Academic Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Anguera, X.; Bozonnet, S.; Evans, N.; Fredouille, C.; Friedland, G.; Vinyals, O. Speaker Diarization: A Review of Recent Research. IEEE Trans. Audio Speech Lang. Process. 2012, 20, 356–370. [Google Scholar] [CrossRef] [Green Version]
- Kong, Q.; Xu, Y.; Sobieraj, I.; Wang, W.; Plumbley, M.D. Sound Event Detection and Time–Frequency Segmentation from Weakly Labelled Data. IEEE Trans. Audio Speech Lang. Process. 2019, 27, 777–787. [Google Scholar] [CrossRef]
- Fryzlewicz, P. Wild Binary Segmentation for Multiple Change-Point Detection. Ann. Stat. 2014, 42, 2243–2281. [Google Scholar] [CrossRef]
- Colonna, J.G.; Nakamura, E.F.; Rosso, O.A. Feature Evaluation for Unsupervised Bioacoustic Signal Segmentation of Anuran Calls. Expert Syst. Appl. 2018, 106, 107–120. [Google Scholar] [CrossRef]
- Oppenheim, A.V.; Schafer, R.W. From Frequency to Quefrency: A History of the Cepstrum. IEEE Signal Process. Mag. 2004, 21, 95–106. [Google Scholar] [CrossRef]
- Jothilakshmi, S.; Ramalingam, V.; Palanivel, S. Unsupervised Speaker Segmentation with Residual Phase and MFCC Features. Expert Syst. Appl. 2009, 36, 9799–9804. [Google Scholar] [CrossRef]
- Cettolo, M.; Vescovi, M.; Rizzi, R. Evaluation of BIC-Based Algorithms for Audio Segmentation. Comput. Speech Lang. 2005, 19, 147–170. [Google Scholar] [CrossRef]
- Harchaoui, Z.; Lévy-Leduc, C. Multiple Change-Point Estimation with a Total Variation Penalty. J. Am. Stat. Assoc. 2010, 105, 1480–1493. [Google Scholar] [CrossRef] [Green Version]
- Dessein, A.; Cont, A. An Information-Geometric Approach to Real-Time Audio Segmentation. IEEE Signal Process. Lett. 2013, 20, 331–334. [Google Scholar] [CrossRef] [Green Version]
- Lin, S.H.; Yeh, Y.M.; Chen, B. Leveraging Kullback–Leibler Divergence Measures and Information-Rich Cues for Speech Summarization. IEEE Trans. Audio Speech Lang. Process. 2010, 19, 871–882. [Google Scholar] [CrossRef]
- Hargreaves, S.; Klapuri, A.; Sandler, M. Structural Segmentation of Multitrack Audio. IEEE Trans. Audio Speech Lang. Process. 2012, 20, 2637–2647. [Google Scholar] [CrossRef]
- Keshavarz, H.; Scott, C.; Nguyen, X. Optimal Change Point Detection in Gaussian Processes. J. Stat. Plan. Inference 2018, 193, 151–178. [Google Scholar] [CrossRef] [Green Version]
- Barigozzi, M.; Cho, H.; Fryzlewicz, P. Simultaneous Multiple Change-Point and Factor Analysis for High-Dimensional Time Series. J. Econom. 2018, 206, 187–225. [Google Scholar] [CrossRef]
- Zanin, M.; Zunino, L.; Rosso, O.A.; Papo, D. Permutation Entropy and Its Main Biomedical and Econophysics Applications: A Review. Entropy 2012, 14, 1553–1577. [Google Scholar] [CrossRef]
- Wu, Y.; Jin, B.; Chan, E. Detection of Changes in Ground-Level Ozone Concentrations via Entropy. Entropy 2015, 17, 2749–2763. [Google Scholar] [CrossRef] [Green Version]
- Keller, K.; Unakafov, A.; Unakafova, V. Ordinal Patterns, Entropy, and EEG. Entropy 2014, 16, 6212–6239. [Google Scholar] [CrossRef]
- Sinn, M.; Keller, K.; Chen, B. Segmentation and Classification of Time Series Using Ordinal Pattern Distributions. Eur. Phys. J. Spec. Top. 2013, 222, 587–598. [Google Scholar] [CrossRef]
- Fisher, E.; Tabrikian, J.; Dubnov, S. Generalized Likelihood Ratio Test for Voiced-Unvoiced Decision in Noisy Speech Using the Harmonic Model. IEEE Trans. Audio Speech Lang. Process. 2006, 14, 502–510. [Google Scholar] [CrossRef]
- Unakafov, A.; Keller, K. Change-Point Detection Using the Conditional Entropy of Ordinal Patterns. Entropy 2018, 20, 709. [Google Scholar] [CrossRef] [Green Version]
- Azami, H.; Escudero, J. Amplitude-Aware Permutation Entropy: Illustration in Spike Detection and Signal Segmentation. Comput. Methods Progr. Biomed. 2016, 128, 40–51. [Google Scholar] [CrossRef]
- Brandmaier, A.M. Pdc: An R Package for Complexity-Based Clustering of Time Series. J. Stat. Softw. 2015, 67. [Google Scholar] [CrossRef] [Green Version]
- Riedl, M.; Müller, A.; Wessel, N. Practical Considerations of Permutation Entropy: A Tutorial Review. Eur. Phys. J. Spec. Top. 2013, 222, 249–262. [Google Scholar] [CrossRef]
- Bóna, M. Combinatorics of Permutations; Chapman and Hall/CRC: Boca Raton, FL, USA, 2016. [Google Scholar]
- Keller, K.; Sinn, M. Ordinal analysis of time series. Phys. A 2005, 365, 114–120. [Google Scholar] [CrossRef]
- Rigaill, G.; Lebarbier, E.; Robin, S. Exact Posterior Distributions and Model Selection Criteria for Multiple Change-Point Detection Problems. Stat. Comput. 2012, 22, 917–929. [Google Scholar] [CrossRef]
- Truong, C.; Oudre, L.; Vayatis, N. Selective Review of Offline Change Point Detection Methods. Signal Process. 2019, 167, 107299. [Google Scholar] [CrossRef] [Green Version]
- Fan, J.; Zhang, C.; Zhang, J. Generalized Likelihood Ratio Statistics and Wilks Phenomenon. Ann. Stat. 2001, 29, 153–193. [Google Scholar] [CrossRef]
- Niu, Y.S.; Hao, N.; Zhang, H. Multiple Change-Point Detection: A Selective Overview. Stat. Sci. 2016, 31, 611–623. [Google Scholar] [CrossRef] [Green Version]
- Hao, N.; Niu, Y.S.; Zhang, H. Multiple Change-Point Detection via a Screening and Ranking Algorithm. Stat. Sin. 2013, 23, 1553. [Google Scholar] [CrossRef] [Green Version]
- Cho, H.; Fryzlewicz, P. Multiple-Change-Point Detection for High Dimensional Time Series via Sparsified Binary Segmentation. J. R. Stat. Soc. Ser. B (Stat. Methodol.) 2015, 77, 475–507. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y.; Xie, L.; Xie, Y.; Xu, H. Sequential Change-Point Detection via Online Convex Optimization. Entropy 2018, 20, 108. [Google Scholar] [CrossRef] [Green Version]
- Arlot, S.; Celisse, A. Segmentation of the Mean of Heteroscedastic Data via Cross-Validation. Stat. Comput. 2011, 21, 613–632. [Google Scholar] [CrossRef] [Green Version]
- Matteson, D.S.; James, N.A. A Nonparametric Approach for Multiple Change Point Analysis of Multivariate Data. J. Am. Stat. Assoc. 2014, 109, 334–345. [Google Scholar] [CrossRef] [Green Version]
- Santos-Domínguez, D.; Torres-Guijarro, S.; Cardenal-López, A.; Pena-Gimenez, A. ShipsEar: An Underwater Vessel Noise Database. Appl. Acoust. 2016, 113, 64–69. [Google Scholar] [CrossRef]
- Hubert, P.; Padovese, L.; Stern, J. A Sequential Algorithm for Signal Segmentation. Entropy 2018, 20, 55. [Google Scholar] [CrossRef] [Green Version]
- Celisse, A.; Marot, G.; Pierre-Jean, M.; Rigaill, G. New Efficient Algorithms for Multiple Change-Point Detection with Reproducing Kernels. Comput. Stat. Data Anal. 2018, 128, 200–220. [Google Scholar] [CrossRef]
- Giannakopoulos, T.; Pikrakis, A. Introduction to Audio Analysis: A MATLAB® Approach; Academic Press: Cambridge, MA, USA, 2014. [Google Scholar]
- McFee, B.; Raffel, C.; Liang, D.; Ellis, D.P.; McVicar, M.; Battenberg, E.; Nieto, O. Librosa: Audio and Music Signal Analysis in Python. In Proceedings of the 14th Python in Science Conference, Austin, TX, USA, 6–12 July 2015; Volume 8. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | |||||
|---|---|---|---|---|---|
| Proposed | 500 | 125 | 3.28±1.44 | 8.85±4.71 | 21.30±12.85 |
| Proposed | 500 | 250 | 1.64±1.47 | 6.33±4.38 | 14.9±13.73 |
| Proposed | 1000 | 250 | 0.68±0.89 | 6.88±4.75 | 15±13.6 |
| Proposed | 1000 | 500 | 0.54±0.7 | 5.55±8.74 | 18.4±32.76 |
| Proposed | 1500 | 375 | 0.38±0.6 | 8.45±11.06 | 20.22±43.4 |
| Proposed | 1500 | 750 | 0.24±0.55 | 7.05±11.56 | 18.5±44.62 |
| Proposed | 2000 | 500 | 0.02±0.14 | 6.3±14.78 | 20.6±58.15 |
| Proposed | 2000 | 1000 | 0.1±0.3 | 6.35±15.46 | 20.8±61.18 |
| Proposed | 2500 | 625 | −0.6±0.49 | 82.55±55.41 | 318.2±222.29 |
| Proposed | 2500 | 1250 | −0.72±0.45 | 93.15±53.87 | 366.2±213.87 |
| BSoE | 500 | 125 | 22.44±2.23 | 13.85±7.07 | 27.2±19.8 |
| BSoE | 500 | 250 | 22.2±1.83 | 14.25±6.27 | 30±18.76 |
| BSoE | 1000 | 250 | 8.32±1.38 | 19±18.4 | 42.2±52.47 |
| BSoE | 1000 | 500 | 8.42±1.47 | 22.25±23.34 | 58.6±86.19 |
| BSoE | 1500 | 375 | 3.56±0.98 | 42.7±42.04 | 140±160.11 |
| BSoE | 1500 | 750 | 3.5±1.12 | 46.8±44.32 | 139.4±140.21 |
| BSoE | 2000 | 500 | 1.54±0.61 | 25.5±34.64 | 75.6±122.25 |
| BSoE | 2000 | 1000 | 1.58±0.6 | 26.5±31.47 | 76.4±105.6 |
| BSoE | 2500 | 625 | −0.18±0.38 | 44.0±48.33 | 143.6±182.25 |
| BSoE | 2500 | 1250 | −0.14±0.35 | 42.8±47.58 | 133.2±177.25 |
| BSoZ | 500 | 125 | 21.82±2.6 | 16.76±6.2 | 27.84±17.65 |
| BSoZ | 500 | 250 | 21.14±1.96 | 16±5.4 | 26.3±13.78 |
| BSoZ | 1000 | 250 | 8.14±1.39 | 19.8±10.44 | 41.4±38.94 |
| BSoZ | 1000 | 500 | 8.22±1.19 | 17.5±12.36 | 32±35.83 |
| BSoZ | 1500 | 375 | 3.48±0.81 | 32.15±27.44 | 91±107.28 |
| BSoZ | 1500 | 750 | 3.68±0.97 | 37.8±33.01 | 106.6±125.82 |
| BSoZ | 2000 | 500 | 1.72±0.49 | 33.1±35.45 | 89.0±127.8 |
| BSoZ | 2000 | 1000 | 1.82±0.38 | 31.3±30.21 | 81.8±120.97 |
| BSoZ | 2500 | 625 | −0.02±0.14 | 15.6±16.81 | 33.6±67.07 |
| BSoZ | 2500 | 1250 | −0.04±0.2 | 21.2±26.27 | 51.6±98.09 |
| Method | SVC (%) | RF (%) |
|---|---|---|
| Proposed | 86.30 ± 4.63 | 82.71 ± 3.52 |
| BSoE | 79.27 ± 3.49 | 73.60 ± 6.08 |
| BSoZ | 82.21 ± 5.37 | 77.75 ± 4.13 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, L.; Shen, X.-H.; Zhang, M.-H.; Wang, H.-Y. Segmentation Method for Ship-Radiated Noise Using the Generalized Likelihood Ratio Test on an Ordinal Pattern Distribution. Entropy 2020, 22, 374. https://doi.org/10.3390/e22040374
He L, Shen X-H, Zhang M-H, Wang H-Y. Segmentation Method for Ship-Radiated Noise Using the Generalized Likelihood Ratio Test on an Ordinal Pattern Distribution. Entropy. 2020; 22(4):374. https://doi.org/10.3390/e22040374
Chicago/Turabian StyleHe, Lei, Xiao-Hong Shen, Mu-Hang Zhang, and Hai-Yan Wang. 2020. "Segmentation Method for Ship-Radiated Noise Using the Generalized Likelihood Ratio Test on an Ordinal Pattern Distribution" Entropy 22, no. 4: 374. https://doi.org/10.3390/e22040374