Design and Practical Stability of a New Class of Impulsive Fractional-Like Neural Networks


{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Generalized FLDs and Integrals
- if , then has the form
- if for some , then has the form
3. Impulsive Fractional-Like Neural Networks: Main Notions and Definitions
4. Practical Stability of Impulsive Fractional-Like Neural Networks
4.1. Main Practical Stability Results
- V is defined on G, V has non-negative values and for ;
- V is continuous in G, differentiable in t and locally Lipschitz continuous with respect to its second argument on each of the sets ;
- For each and , there exist the finite limitsand .
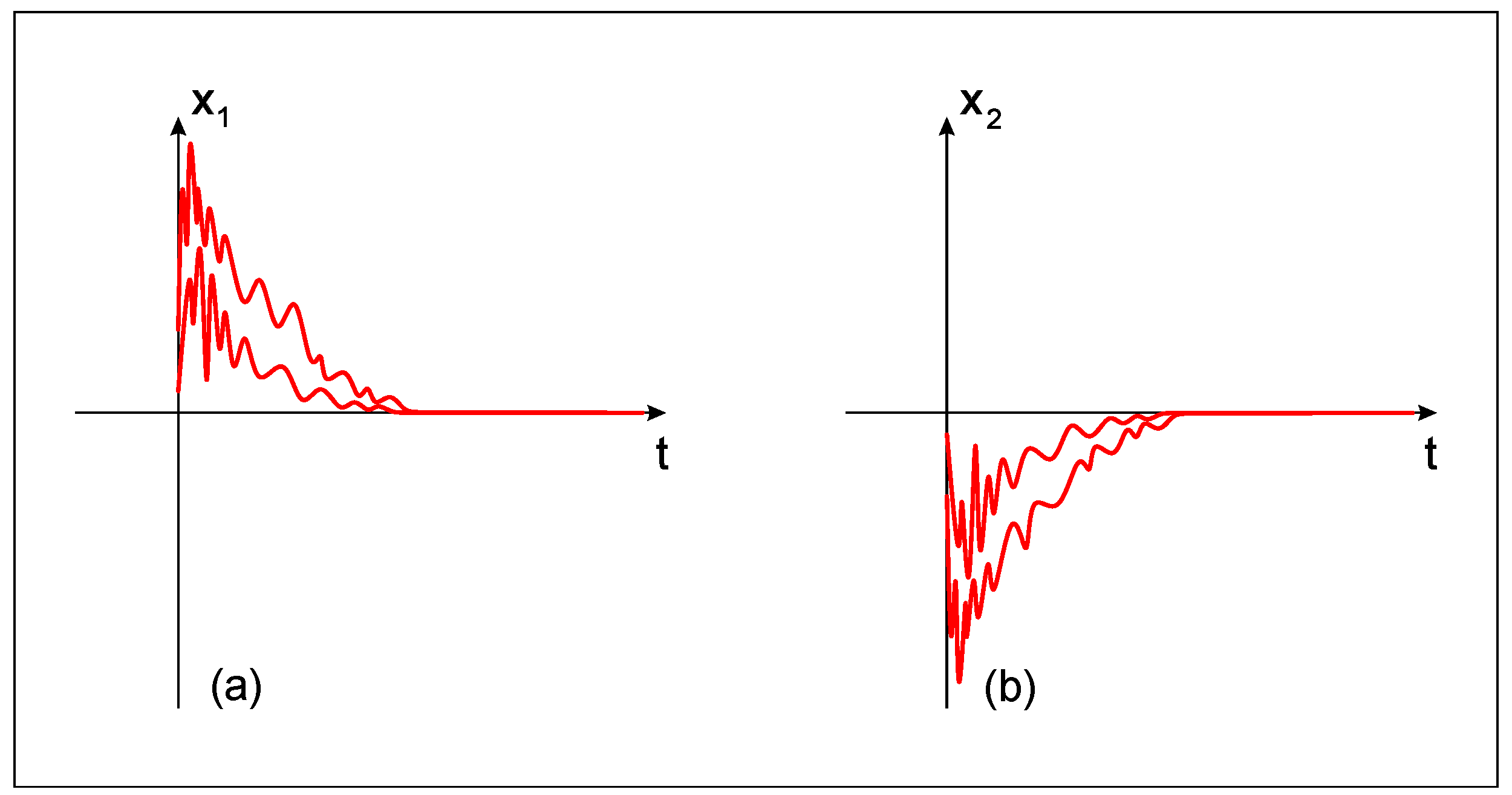
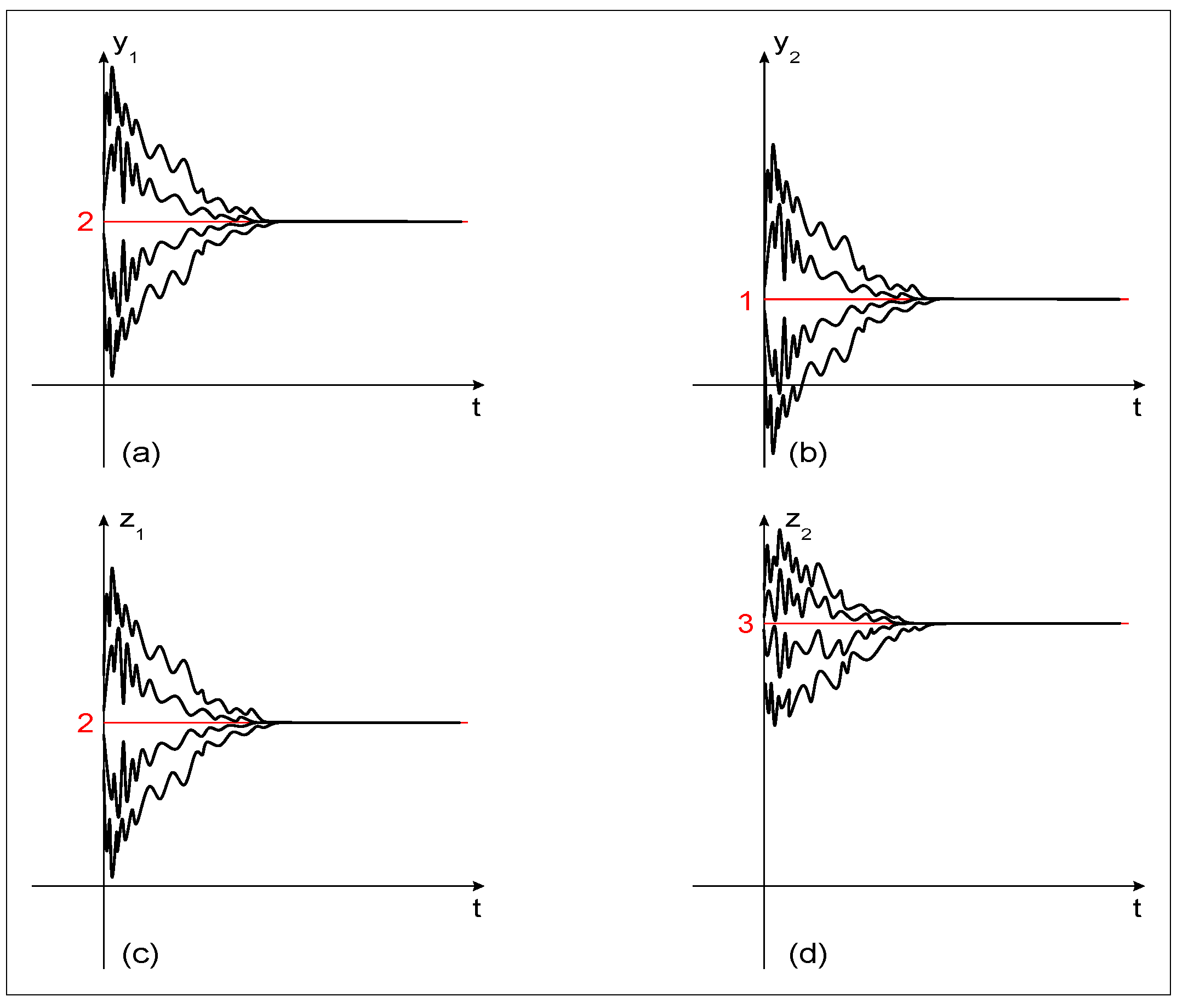
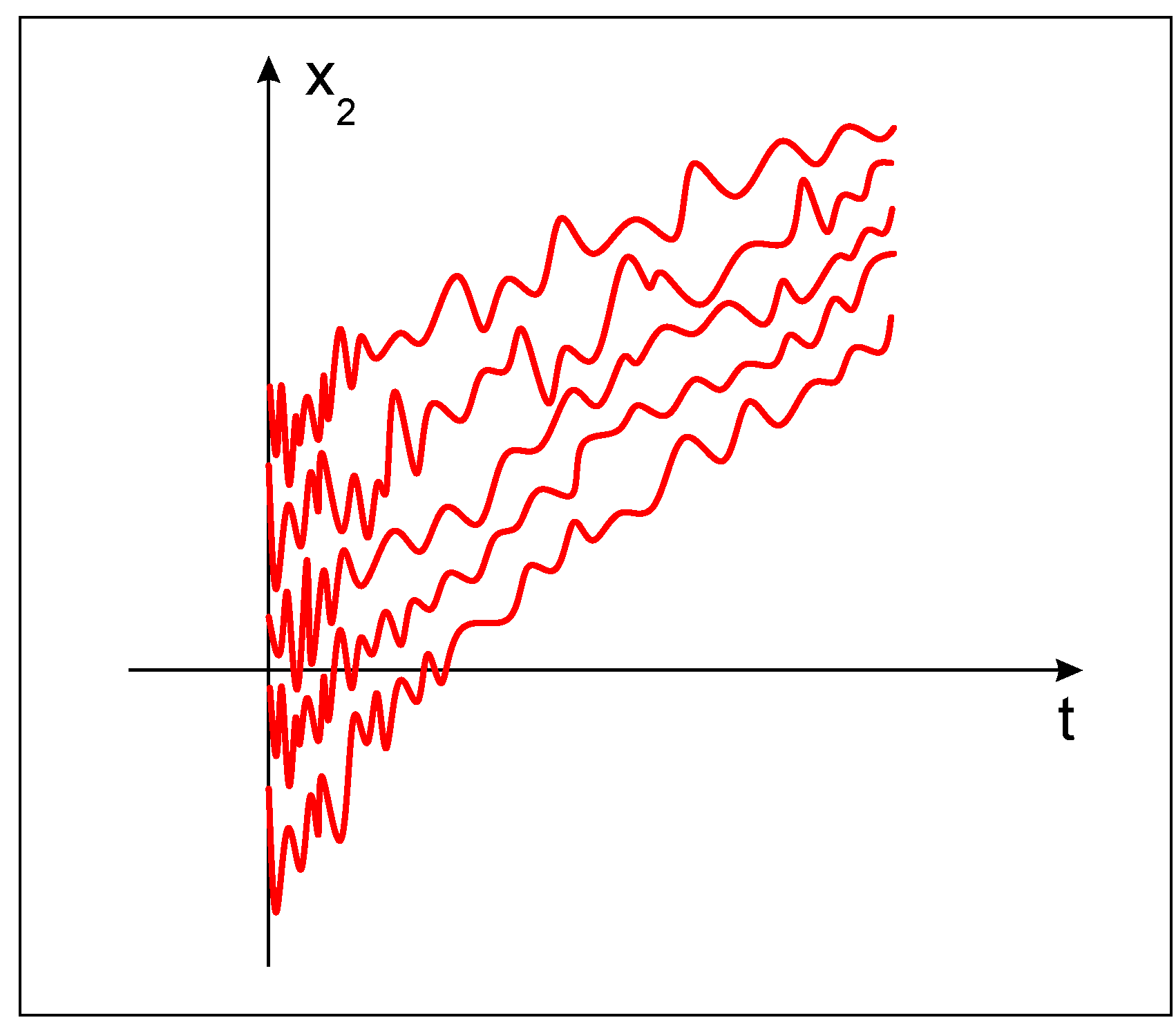
4.2. Examples
5. Impulsive Fractional-Like Neural Networks with Uncertain Parameters
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chua, L.O.; Yang, L. Cellular neural networks: Theory. IEEE Trans. Circuits Syst. 1988, 35, 1257–1272. [Google Scholar] [CrossRef]
- Chua, L.O.; Yang, L. Cellular neural networks: Applications. IEEE Trans. Circuits Syst. 1988, 35, 1273–1290. [Google Scholar] [CrossRef]
- Arbib, M. Brains, Machines, and Mathematics, 2nd ed.; Springer: New York, NY, USA, 1987. [Google Scholar]
- Haykin, S. Neural Networks: A Comprehensive Foundation, 2nd ed.; Prentice-Hall: Englewood Cliffs, NJ, USA, 1999. [Google Scholar]
- Hsu, Y.; Wang, S.; Yu, C. A sequential approximation method using neural networks for engineering design optimization problems. Eng. Optim. 2003, 35, 489–511. [Google Scholar] [CrossRef]
- Wiedemann, S.; Marban, A.; Müller, K.-R.; Samek, W. Entropy-constrained training of deep neural networks. arXiv 2018, arXiv:1812.07520. [Google Scholar]
- Ban, J.-C.; Chang, C.-H.; Huang, N.-Z. Entropy bifurcation of neural networks on Cayley trees. arXiv 2018, arXiv:1706.09283. [Google Scholar] [CrossRef]
- Chen, J.; Li, X.; Wang, D. Asymptotic stability and exponential stability of impulsive delayed Hopfield neural networks. Abstr. Appl. Anal. 2013, 2013, 1–10. [Google Scholar] [CrossRef]
- He, W.; Qian, F.; Cao, J. Pinning-controlled synchronization of delayed neural networks with distributed-delay coupling via impulsive control. Neural Netw. 2017, 85, 1–9. [Google Scholar] [CrossRef]
- Hu, B.; Guan, Z.-H.; Chen, G.; Lewis, F.L. Multistability of delayed hybrid impulsive neural networks with application to associative memories. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 1537–1551. [Google Scholar] [CrossRef]
- Li, X. Existence and global exponential stability of periodic solution for impulsive Cohen–Grossberg-type BAM neural networks with continuously distributed delays. Appl. Math. Comput. 2009, 215, 292–307. [Google Scholar] [CrossRef]
- Maharajan, C.; Raja, R.; Cao, J.; Rajchakit, G.; Alsaedi, A. Impulsive Cohen–Grossberg BAM neural networks with mixed time-delays: An exponential stability analysis issue. Neurocomputing 2018, 275, 2588–2602. [Google Scholar] [CrossRef]
- Stamova, I.M.; Stamov, G.T. Applied Impulsive Mathematical Models, 1st ed.; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Stamova, I.M.; Stamov, T.; Simeonova, N. Impulsive effects on the global exponential stability of neural network models with supremums. Eur. J. Control 2014, 20, 199–206. [Google Scholar] [CrossRef]
- Zhang, X.; Lv, X.; Li, X. Sampled-data based lag synchronization of chaotic delayed neural networks with impulsive control. Nonlinear Dyn. 2017, 90, 2199–2207. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations, 1st ed.; Elsevier Science Limited: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Podlubny, I. Fractional Differential Equations, 1st ed.; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Chen, L.; Basu, B.; McCabe, D. Fractional order models for system identification of thermal dynamics of buildings. Energ. Build. 2016, 133, 381–388. [Google Scholar] [CrossRef] [Green Version]
- Magin, R.L.; Ingo, C. Entropy and information in a fractional order model of anomalous diffusion. IFAC Proc. 2012, 45, 428–433. [Google Scholar] [CrossRef]
- Sierociuk, D.; Skovranek, T.; Macias, M.; Podlubny, I.; Petras, I.; Dzielinski, A.; Ziubinski, P. Diffusion process modeling by using fractional-order models. Appl. Math. Comput. 2015, 257, 2–11. [Google Scholar] [CrossRef] [Green Version]
- Xi, H.L.; Li, Y.X.; Huang, X. Generation and nonlinear dynamical analyses of fractional-order memristor–based Lorenz systems. Entropy 2014, 16, 6240–6253. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Qu, J.; Chai, Y.; Wu, R.; Qi, G. Synchronization of a class of fractional-order chaotic neural networks. Entropy 2013, 15, 3265–3276. [Google Scholar] [CrossRef]
- Hu, H.-P.; Wang, J.-K.; Xie, F.-L. Dynamics analysis of a new fractional-order Hopfield neural network with delay and its generalized projective synchronization. Entropy 2019, 21, 1. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Wang, Z.; Lu, J.; Li, Y. Adaptive synchronization of fractional-order complex-valued neural networks with discrete and distributed delays. Entropy 2018, 20, 124. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Yu, Y.G.; Yu, J.Z. LMI Conditions for global stability of fractional-order neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2016, 28, 2423–2433. [Google Scholar] [CrossRef]
- Stamov, G.; Stamova, I. Impulsive fractional-order neural networks with time-varying delays: Almost periodic solutions. Neural Comput. Appl. 2017, 28, 3307–3316. [Google Scholar] [CrossRef]
- Stamova, I.M.; Stamov, G.T. Functional and Impulsive Differential Equations of Fractional Order: Qualitative Analysis and Applications, 1st ed.; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Stamova, I.; Stamov, G. Mittag–Leffler synchronization of fractional neural networks with time-varying delays and reaction-diffusion terms using impulsive and linear controllers. Neural Netw. 2017, 96, 22–32. [Google Scholar] [CrossRef] [PubMed]
- Wan, P.; Jian, J. Impulsive stabilization and synchronization of fractional-order complex-valued neural networks. Neural Process. Lett. 2019, 50, 2201–2218. [Google Scholar] [CrossRef]
- Zhang, X.; Niu, P.; Ma, Y.; Wei, Y.; Li, G. Global Mittag-Leffler stability analysis of fractional-order impulsive neural networks with one-side Lipschitz condition. Neural Netw. 2017, 94, 67–75. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, B.; Alsaedi, A.; Ntouyas, S.K.; Tariboon, J. Hadamard-Type Fractional Differential Equations, Inclusions and Inequalities, 1st ed.; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Atangana, A.; Gómez–Aguilar, J.F. Numerical approximation of Riemann-Liouville definition of fractional derivative: From Riemann–Liouville to Atangana–Baleanu. Numer. Methods Part. Differ. Equ. 2018, 34, 1502–1523. [Google Scholar] [CrossRef]
- Bayın, S.S. Definition of the Riesz derivative and its application to space fractional quantum mechanics. J. Math. Phys. 2016, 57, 123501. [Google Scholar] [CrossRef] [Green Version]
- Gao, W.; Ghanbari, B.; Baskonus, H.M. New numerical simulations for some real world problems with Atangana–Baleanu fractional derivative. Chaos Solitons Fractals 2019, 128, 34–43. [Google Scholar] [CrossRef]
- Taneco–Heránndez, M.A.; Morales–Delgado, V.F.; Gómez-Aguilar, J.F. Fractional Kuramoto–Sivashinsky equation with power law and stretched Mittag-Leffler kernel. Phys. A 2019, 527, 121085. [Google Scholar] [CrossRef]
- Khalil, R.; Al Horani, M.; Yousef, A.; Sababheh, M. A new definition of fractional derivative. J. Comput. Appl. Math. 2014, 264, 65–70. [Google Scholar] [CrossRef]
- Abdeljawad, T. On conformable fractional calculus. J. Comput. Appl. Math. 2015, 279, 57–66. [Google Scholar] [CrossRef]
- Pospíšil, M.; Pospíšilova Škripkova, L. Sturm’s theorems for conformable fractional differential equation. Math. Commun. 2016, 21, 273–281. [Google Scholar]
- Souahi, A.; Ben Makhlouf, A.; Hammami, M.A. Stability analysis of conformable fractional-order nonlinear systems. Indag. Math. 2017, 28, 1265–1274. [Google Scholar] [CrossRef]
- Caputo, M.; Fabrizio, M. A new definition of fractional derivative without singular kernel. Progr. Fract. Differ. Appl. 2015, 1, 1–13. [Google Scholar]
- Abdelhakim, A.; Tenreiro Machado, J.A. A critical analysis of the conformable derivative. Nonlinear Dynam. 2019, 95, 3063–3073. [Google Scholar] [CrossRef]
- Ortigueira, M.; Machado, J. Which Derivative? Fractal Fract. 2017, 1, 3. [Google Scholar] [CrossRef]
- Ortigueira, M.; Machado, J. A critical analysis of the Caputo-Fabrizio operator. Commun. Nonlinear Sci. Numer. Simul. 2018, 59, 608–611. [Google Scholar] [CrossRef]
- Sales Teodoro, G.; Tenreiro Machado, J.A.; de Oliveira, E.C. A review of definitions of fractional derivatives and other operators. J. Comput. Phys. 2019, 388, 195–208. [Google Scholar] [CrossRef]
- Tarasov, V. Caputo–Fabrizio operator in terms of integer derivatives: Memory or distributed lag? Comp. Appl. Math. 2019, 38, 113. [Google Scholar] [CrossRef]
- Martynyuk, A.A.; Stamova, I.M. Fractional-like derivative of Lyapunov-type functions and applications to the stability analysis of motion. Electron. J. Differ. Equ. 2018, 2018, 1–12. [Google Scholar]
- Kiskinov, H.; Petkova, M.; Zahariev, A. Remarks about the existence of conformable derivatives and some consequences. arXiv 2019, arXiv:1907.03486. [Google Scholar]
- Martynyuk, A.A. On the stability of the solutions of fractional-like equations of perturbed motion. Dopov. Nats. Akad. Nauk Ukr. Mat. Prirodozn. Tekh. Nauk. 2018, 6, 9–16. (In Russian) [Google Scholar] [CrossRef]
- Martynyuk, A.A.; Stamov, G.; Stamova, I. Integral estimates of the solutions of fractional-like equations of perturbed motion. Nonlinear Anal. Model. Control 2019, 24, 138–149. [Google Scholar] [CrossRef]
- Martynyuk, A.A.; Stamov, G.; Stamova, I. Practical stability analysis with respect to manifolds and boundedness of differential equations with fractional-like derivatives. Rocky Mt. J. Math. 2019, 49, 211–233. [Google Scholar] [CrossRef]
- Sitho, S.; Ntouyas, S.K.; Agarwal, P.; Tariboon, J. Noninstantaneous impulsive inequalities via conformable fractional calculus. J. Inequal. Appl. 2018, 2018, 261. [Google Scholar] [CrossRef]
- Stamov, G.; Martynyuk, A.; Stamova, I. Impulsive fractional-like differential equations: Practical stability and boundedness with respect to h−manifolds. Fractal Fract. 2019, 3, 50. [Google Scholar] [CrossRef] [Green Version]
- Tariboon, J.; Ntouyas, S.K. Oscillation of impulsive conformable fractional differential equations. Open Math. 2016, 14, 497–508. [Google Scholar] [CrossRef] [Green Version]
- Ballinger, G.; Liu, X. Practical stability of impulsive delay differential equations and applications to control problems. In Optimization Methods and Applications. Applied Optimization; Yang, X., Teo, K.L., Caccetta, L., Eds.; Kluwer: Dordrecht, The Netherlands, 2001; Volume 52, pp. 3–21. [Google Scholar]
- Lakshmikantham, V.; Leela, S.; Martynyuk, A.A. Practical Stability of Nonlinear Systems; World Scientific: Teaneck, NJ, USA, 1990. [Google Scholar]
- Martynyuk, A.A. Advances in Stability Theory at the End of the 20th Century. Stability and Control: Theory, Methods and Applications, 1st ed.; Taylor and Francis: New York, NY, USA, 2002. [Google Scholar]
- Stamov, G.; Stamova, I.M.; Li, X.; Gospodinova, E. Practical stability with respect to h-manifolds for impulsive control functional differential equations with variable impulsive perturbations. Mathematics 2019, 7, 656. [Google Scholar] [CrossRef] [Green Version]
- Cicek, M.; Yaker, C.; Gücen, M.B. Practical stability in terms of two measures for fractional order systems in Caputo’s sense with initial time difference. J. Frankl. Inst. 2014, 351, 732–742. [Google Scholar] [CrossRef]
- Stamova, I.M.; Henderson, J. Practical stability analysis of fractional-order impulsive control systems. ISA Trans. 2016, 64, 77–85. [Google Scholar] [CrossRef]
- Bohner, M.; Stamova, I.; Stamov, G. Impulsive control functional differential systems of fractional order: Stability with respect to manifolds. Eur. Phys. J. Spec. Top. 2017, 226, 3591–3607. [Google Scholar] [CrossRef]
- Smale, S. Stable manifolds for differential equations and diffeomorphisms. Ann. Sc. Norm. Sup. Pisa 1963, 3, 97–116. [Google Scholar]
- Stamov, G. Lyapunov’s functions and existence of integral manifolds for impulsive differential systems with time-varying delay. Methods Appl. Anal. 2009, 16, 291–298. [Google Scholar]
- Liu, B.; Liu, X.; Liao, X. Robust stability of uncertain impulsive dynamical systems. J. Math. Anal. Appl. 2004, 290, 519–533. [Google Scholar] [CrossRef] [Green Version]
- Stamov, G.T.; Alzabut, J.O. Almost periodic solutions in the PC-space for uncertain impulsive dynamical systems. Nonlinear Anal. 2011, 74, 4653–4659. [Google Scholar] [CrossRef]
- Stamov, G.T.; Simeonov, S.; Stamova, I.M. Uncertain impulsive Lotka–Volterra competitive systems: Robust stability of almost periodic solutions. Chaos Solitons Fractals 2018, 110, 178–184. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Mittag–Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]



© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stamov, G.; Stamova, I.; Martynyuk, A.; Stamov, T. Design and Practical Stability of a New Class of Impulsive Fractional-Like Neural Networks. Entropy 2020, 22, 337. https://doi.org/10.3390/e22030337
Stamov G, Stamova I, Martynyuk A, Stamov T. Design and Practical Stability of a New Class of Impulsive Fractional-Like Neural Networks. Entropy. 2020; 22(3):337. https://doi.org/10.3390/e22030337
Chicago/Turabian StyleStamov, Gani, Ivanka Stamova, Anatoliy Martynyuk, and Trayan Stamov. 2020. "Design and Practical Stability of a New Class of Impulsive Fractional-Like Neural Networks" Entropy 22, no. 3: 337. https://doi.org/10.3390/e22030337