Commensurate and Non-Commensurate Fractional-Order Discrete Models of an Electric Individual-Wheel Drive on an Autonomous Platform

 , ,
, ,  , and
, and
Abstract
:1. Introduction
2. Non-Commensurate and Commensurate Difference Equation
2.1. Non-Commensurate and Commensurate Linear Time-Invariant FODE
2.2. State-Space Equations of the Non-Commensurate and Commensurate Systems
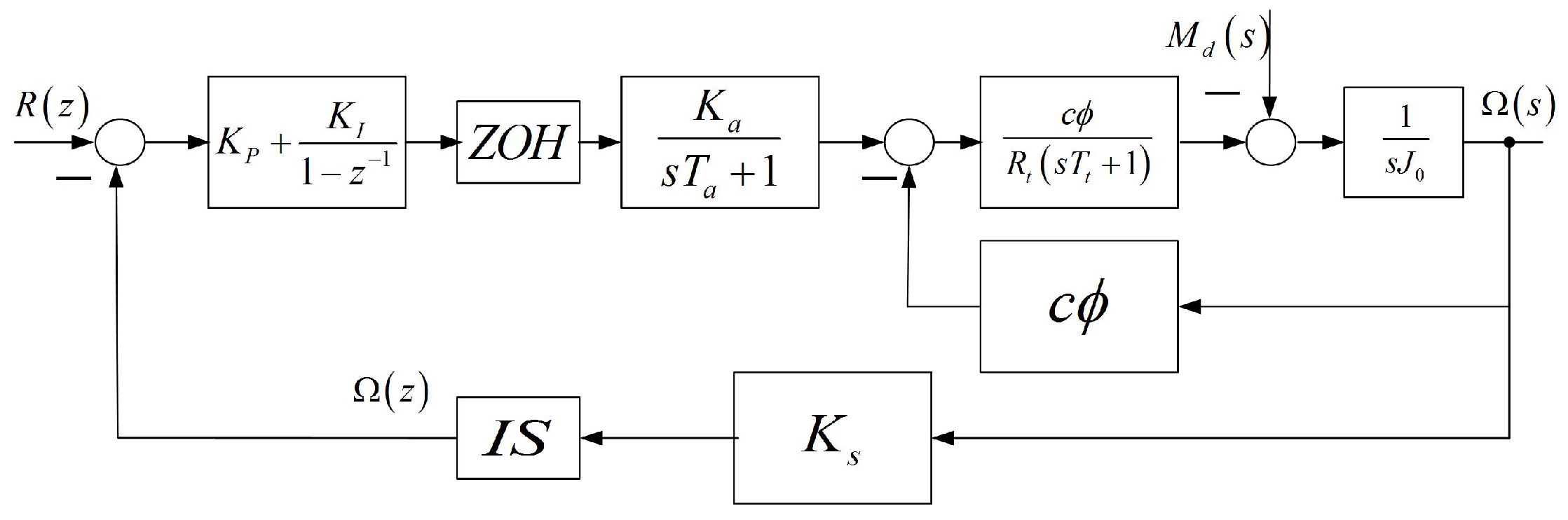
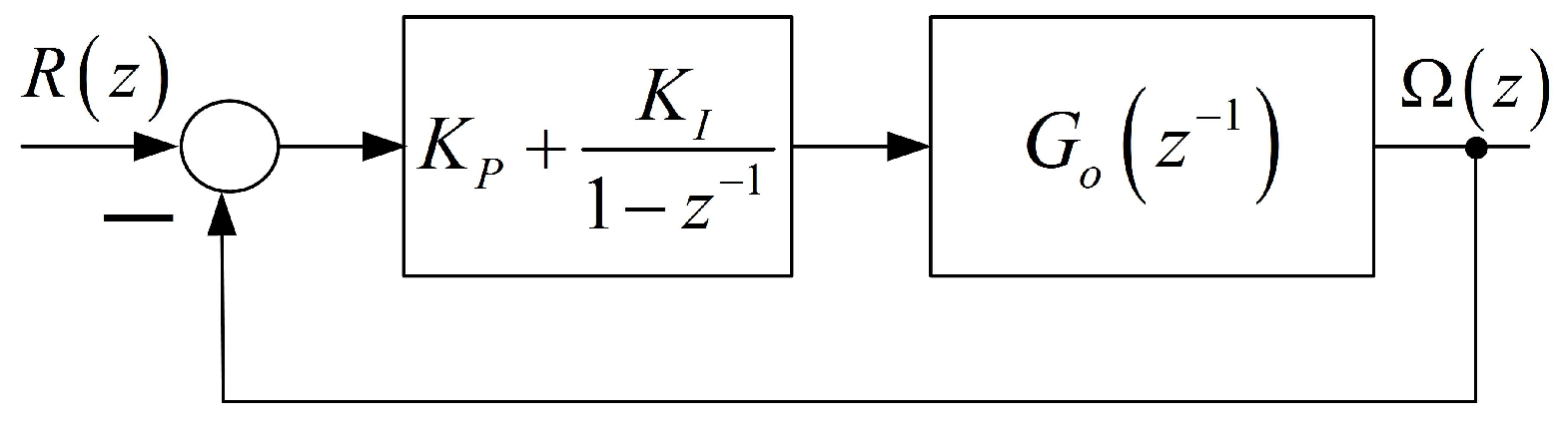
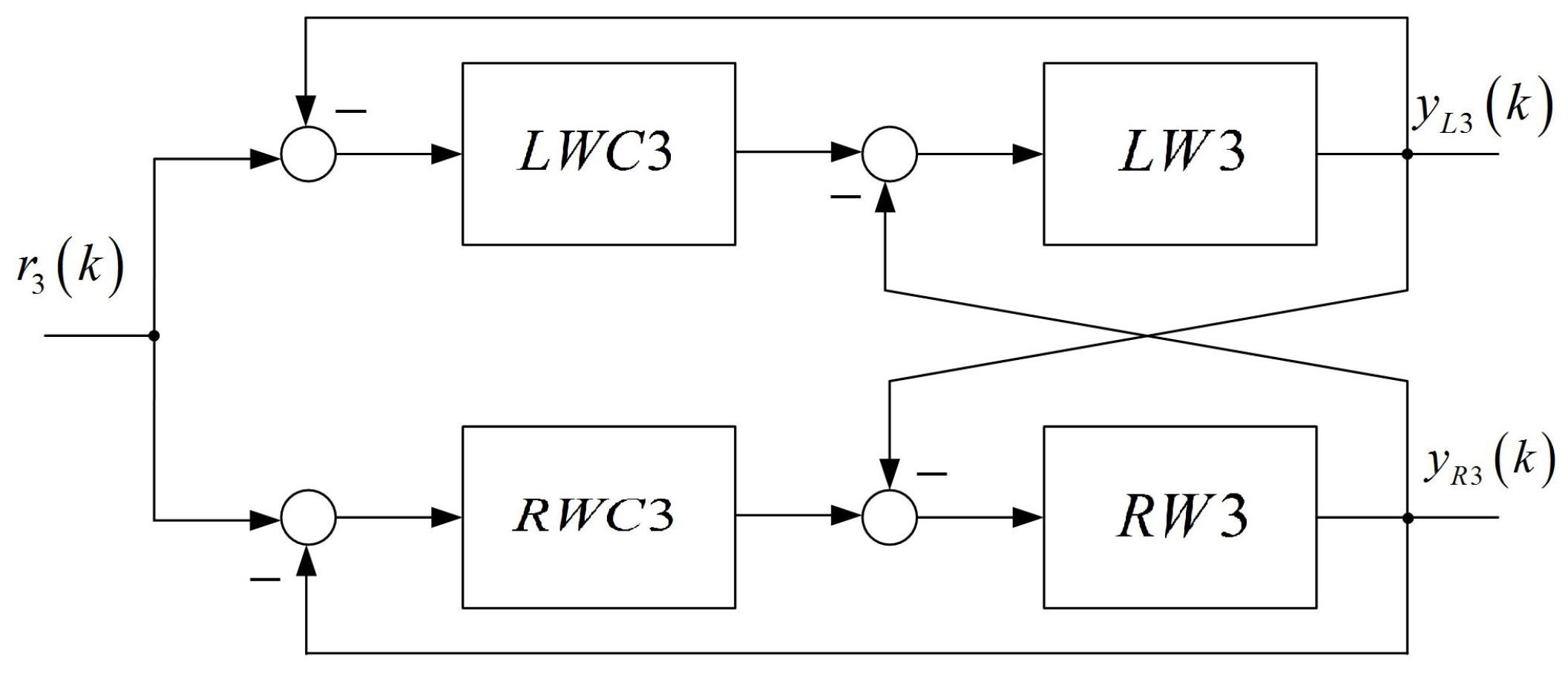
3. Closed-Loop DC Individual-Wheel Drive
3.1. Transient Characteristics of Measured DC Motor Wheel Drive
3.2. Classical Two-Parameter Linear Integer-Order Difference Equation Model of the Wheel-Drive
3.3. Non-Commensurate Three-Parameter Linear Fractional-Order Difference Equation Model of the Wheel-Drive
3.4. Commensurate Linear Fractional-Order State-Space Model of the Wheel-Drive
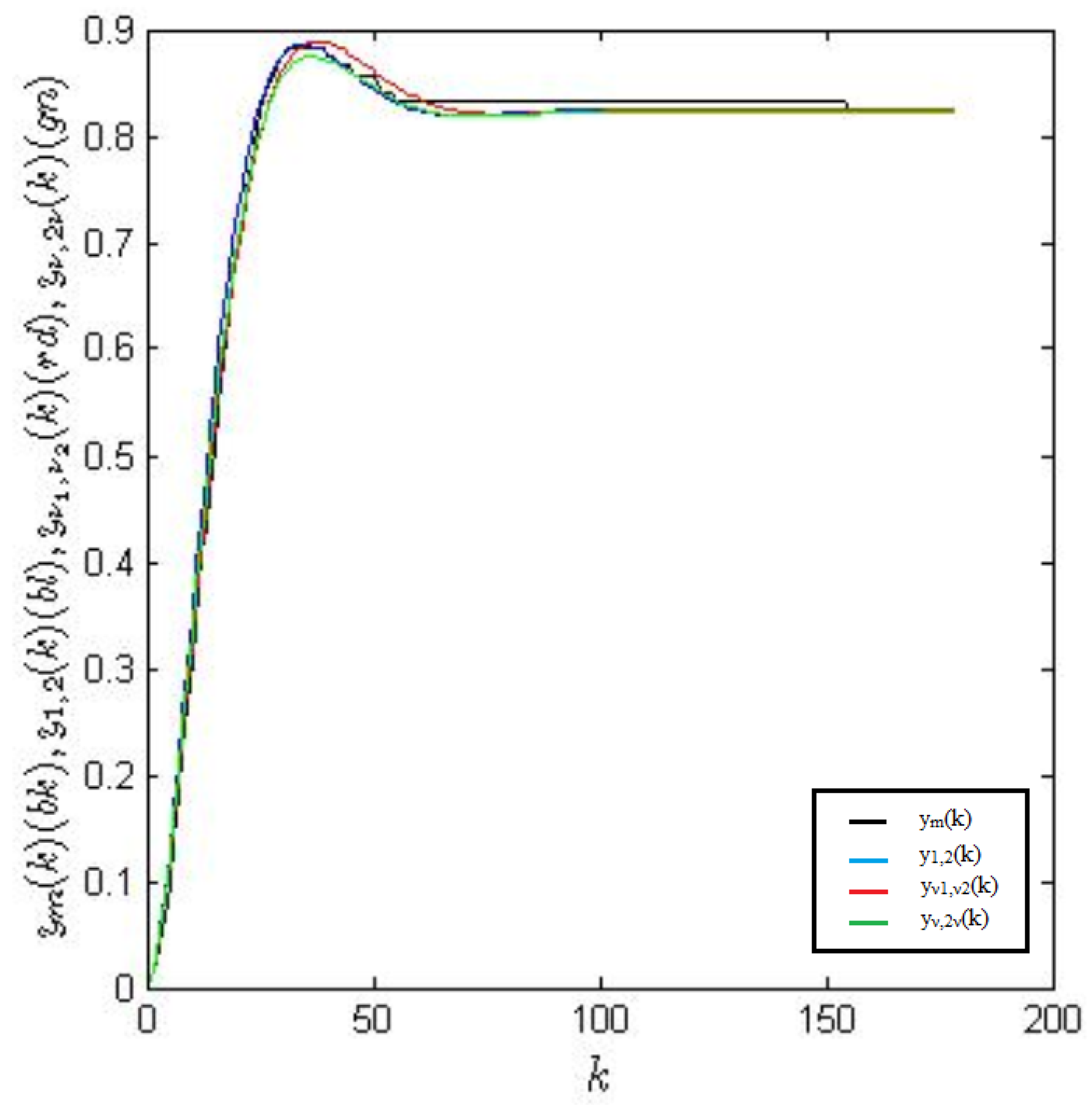
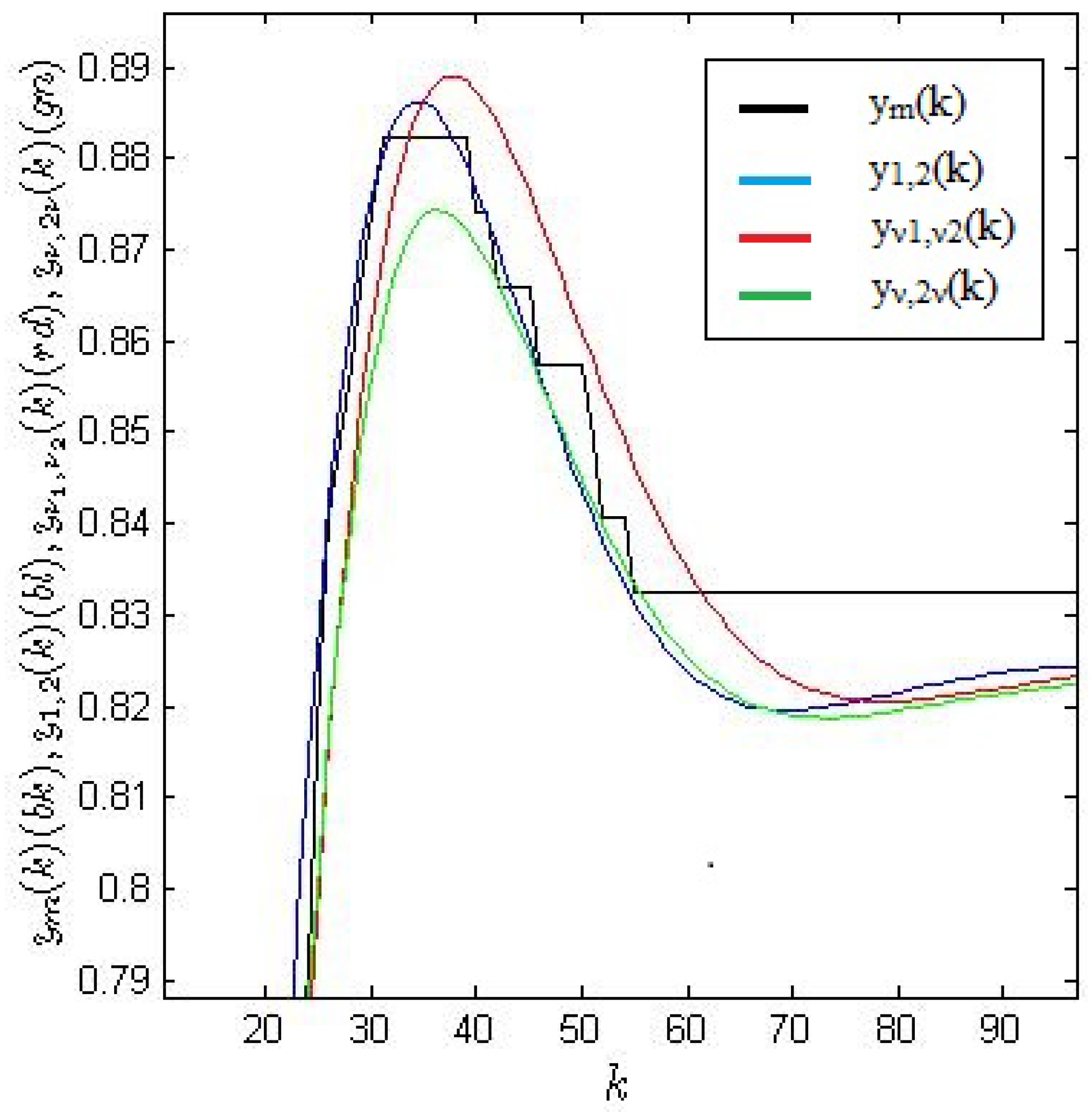
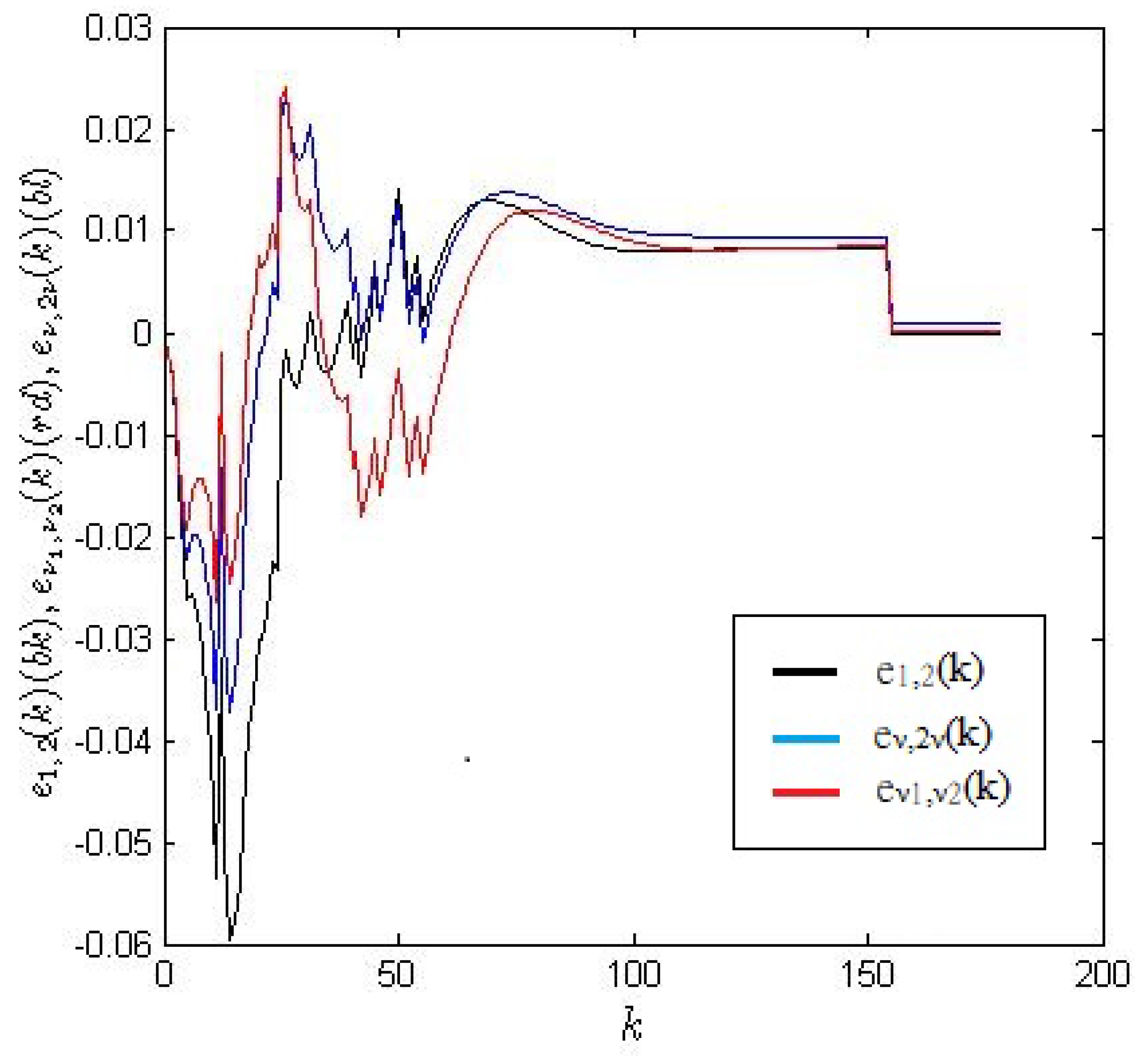
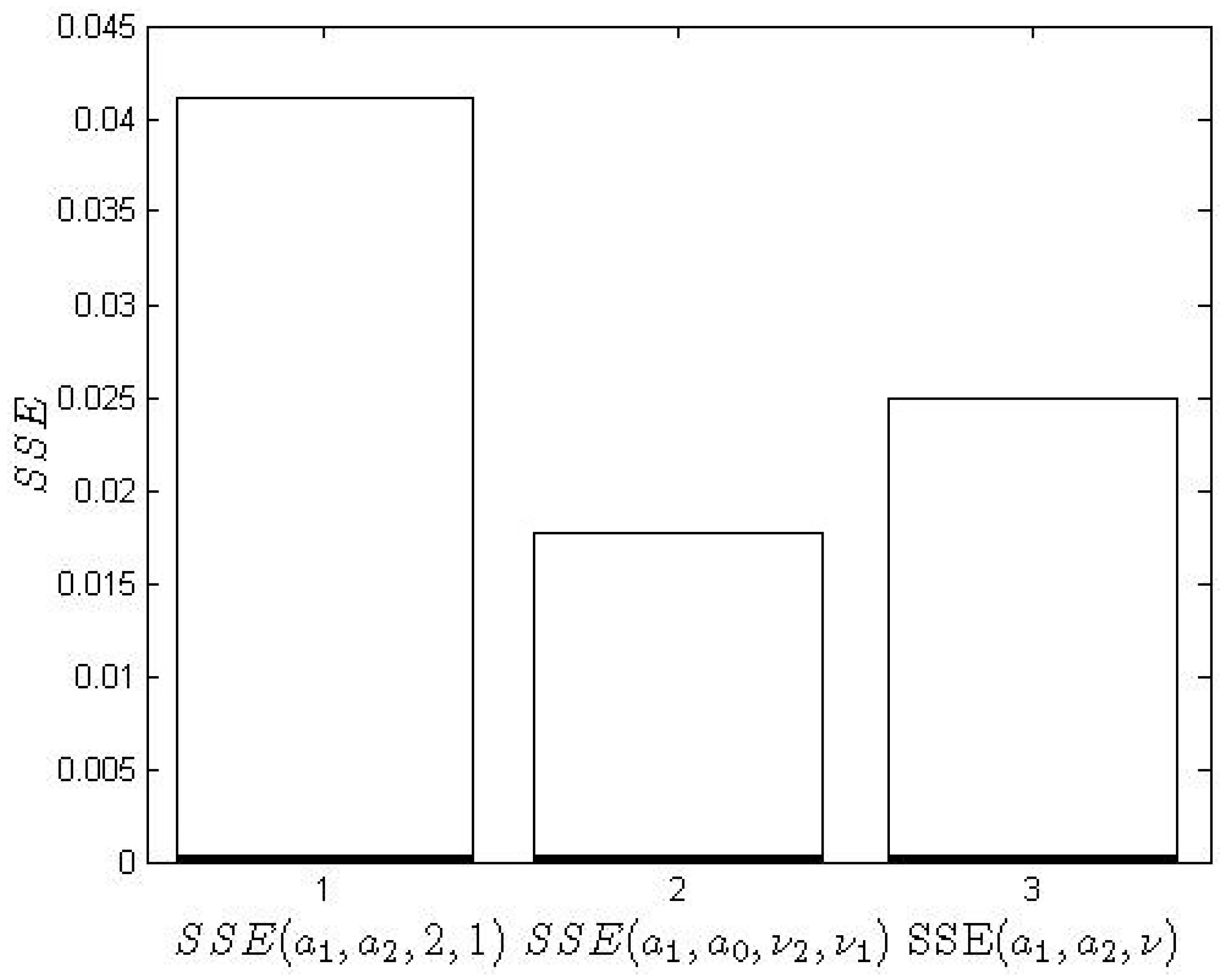
4. Comparison of Models
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Baleanu, D.; Mendes, L.A. Handbook of Fractional Calculus with Applications; Walter de Gruyter GmbH & Co: Berlin, Germany, 2019; Volume 8, ISBN 978-3-11-057192-9. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations, 1st ed.; Elsevier: Amsterdam, The Netherlands, 2006; ISBN 978-0-444-51832-3. [Google Scholar]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; Wiley-Interscience Publications: New York, NY, USA, 1993; ISBN 978-0471588849. [Google Scholar]
- Oustaloup, A. La Dérivation non Entière: Theéorie, Synthèse et Applications; Hermès: Paris, France, 1995; ISBN 978-2866014568. [Google Scholar]
- Petráš, I. Applications in Control; Walter de Gruyter GmbH & Co KG: Berlin, Germany, 2019; ISBN 978-3-11-057174-5. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: London, UK, 1999; ISBN 9780125588409. [Google Scholar]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives; Gordon and Breach Science Publishers: London, UK, 1993; ISBN 978-2881248641. [Google Scholar]
- Caponetto, R.; Dongola, G.; Fortuna, L.; Petras, I. Fractional Order Systems: Modeling and Control Applications; World Scientific Series on Nonlinear Science; World Scientific: Singapore, 2010; Volume 72, ISBN 978-981-4304-19-1. [Google Scholar]
- Das, S. Functional Fractional Calculus for System Identification and Controls; Springer: Berlin/Heidelberg, Germany, 2009; ISBN 978-3-540-72703-3. [Google Scholar]
- Guermah, S.; Djennoune, S.; Bettayeb, M. Discrete-Time Fractional-Order Systems: Modeling and Stability Issues. Adv. Discret. Time Syst. 2010, 183–212. [Google Scholar] [CrossRef] [Green Version]
- Ortigueira, M.D. Fractional Calculus for Scientists and Engineers; Springer Science + Business Media B.V.: Dodrecht, The Netherlands, 2011; ISBN 978-94-007-0747-4. [Google Scholar]
- Sabatier, J.; Agrawal, O.P.; Machado, T.A. Advances in Fractional Calculus. Theoretical Developments and Applications in Physics and Engeneering; Springer: Dordrecht, The Netherlands, 2007; ISBN 978-1-4020-6042-7. [Google Scholar]
- Coronel-Escamilla, A.; Torres, F.; Gómez-Aguilar, J.F.; Escobar-Jiménez, R.F.; Guerrero-Ramírez, G.V. On the trajectory tracking control for an SCARA robot manipulator in a fractional model driven by induction motors with PSO tuning. Multibody Syst. Dyn. 2018, 43, 257–277. [Google Scholar] [CrossRef]
- Fani, D.; Shahraki, E. Two-link robot manipulator using fractional order PID controllers optimized by evolutionary algorithms. Biosci. Biotechnol. Res. Asia 2016, 13, 589–598. [Google Scholar] [CrossRef] [Green Version]
- Shalaby, R.; El-Hossainy, M.; Abo-Zalam, B. Fractional order modeling and control for under-actuated inverted pendulum. Commun. Nonlinear Sci. Numer. Simul. 2019, 74, 97–121. [Google Scholar] [CrossRef]
- Ostalczyk, P. Discrete Fractional-Calculus; World-Scientific: Singapore, 2015; ISBN 978-9-81472-567-5. [Google Scholar]
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu, V. Fractional-order Systems and Controls. Fundamentals and Applications (Advances in Industrial Control); Springer: London, UK, 2010; ISBN 978-1-84996-335-0. [Google Scholar]
- Barbosa, R.S.; Machado, T.A.; Jesus, I.S. Effect of fractional orders in the velocity control of a servo system. Comput. Math. Appl. 2010, 59, 1679–1686. [Google Scholar] [CrossRef] [Green Version]
- Valério, D.; Da Costa, J. An Introduction to Fractional Control; The Institution of Engineering and Technology: London, UK, 2013; ISBN 978-1849195454. [Google Scholar]
- Sheng, H.; Chen, Y.; Qiu, T. Fractional Processes and Fractional-Order Signal Processing: Techniques and Applications, Signals and Communication Technology; Springer: London, UK, 2012; ISBN 978-1-4471-2233-3. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bąkała, M.; Duch, P.; Tenreiro Machado, J.A.; Ostalczyk, P.; Sankowski, D. Commensurate and Non-Commensurate Fractional-Order Discrete Models of an Electric Individual-Wheel Drive on an Autonomous Platform. Entropy 2020, 22, 300. https://doi.org/10.3390/e22030300
Bąkała M, Duch P, Tenreiro Machado JA, Ostalczyk P, Sankowski D. Commensurate and Non-Commensurate Fractional-Order Discrete Models of an Electric Individual-Wheel Drive on an Autonomous Platform. Entropy. 2020; 22(3):300. https://doi.org/10.3390/e22030300
Chicago/Turabian StyleBąkała, Marcin, Piotr Duch, J. A. Tenreiro Machado, Piotr Ostalczyk, and Dominik Sankowski. 2020. "Commensurate and Non-Commensurate Fractional-Order Discrete Models of an Electric Individual-Wheel Drive on an Autonomous Platform" Entropy 22, no. 3: 300. https://doi.org/10.3390/e22030300