A Multiple-Input Multiple-Output Reservoir Computing System Subject to Optoelectronic Feedbacks and Mutual Coupling

Abstract
:1. Introduction
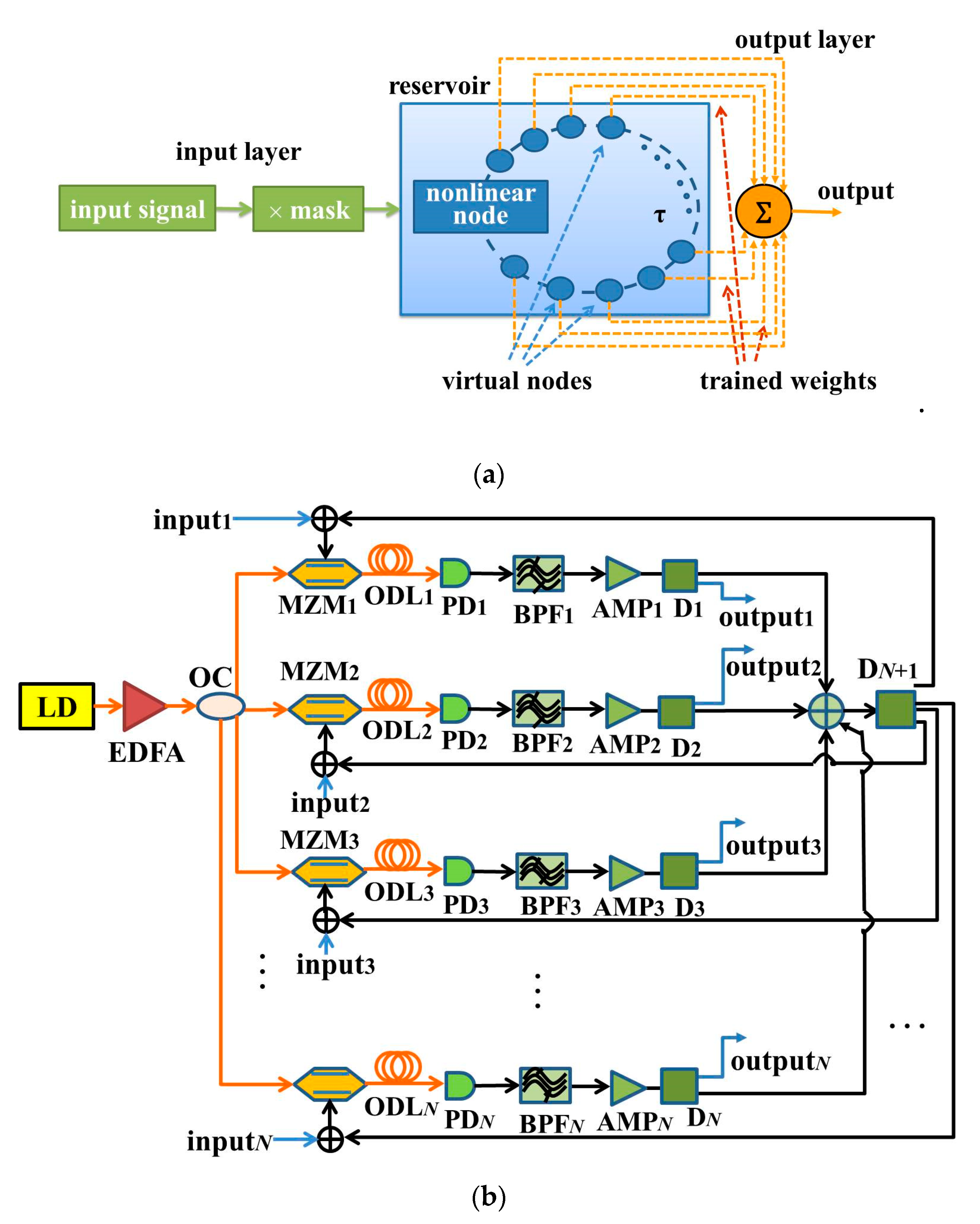
2. Numerical Simulation Model
3. Simulation Results of Signal Recognitions
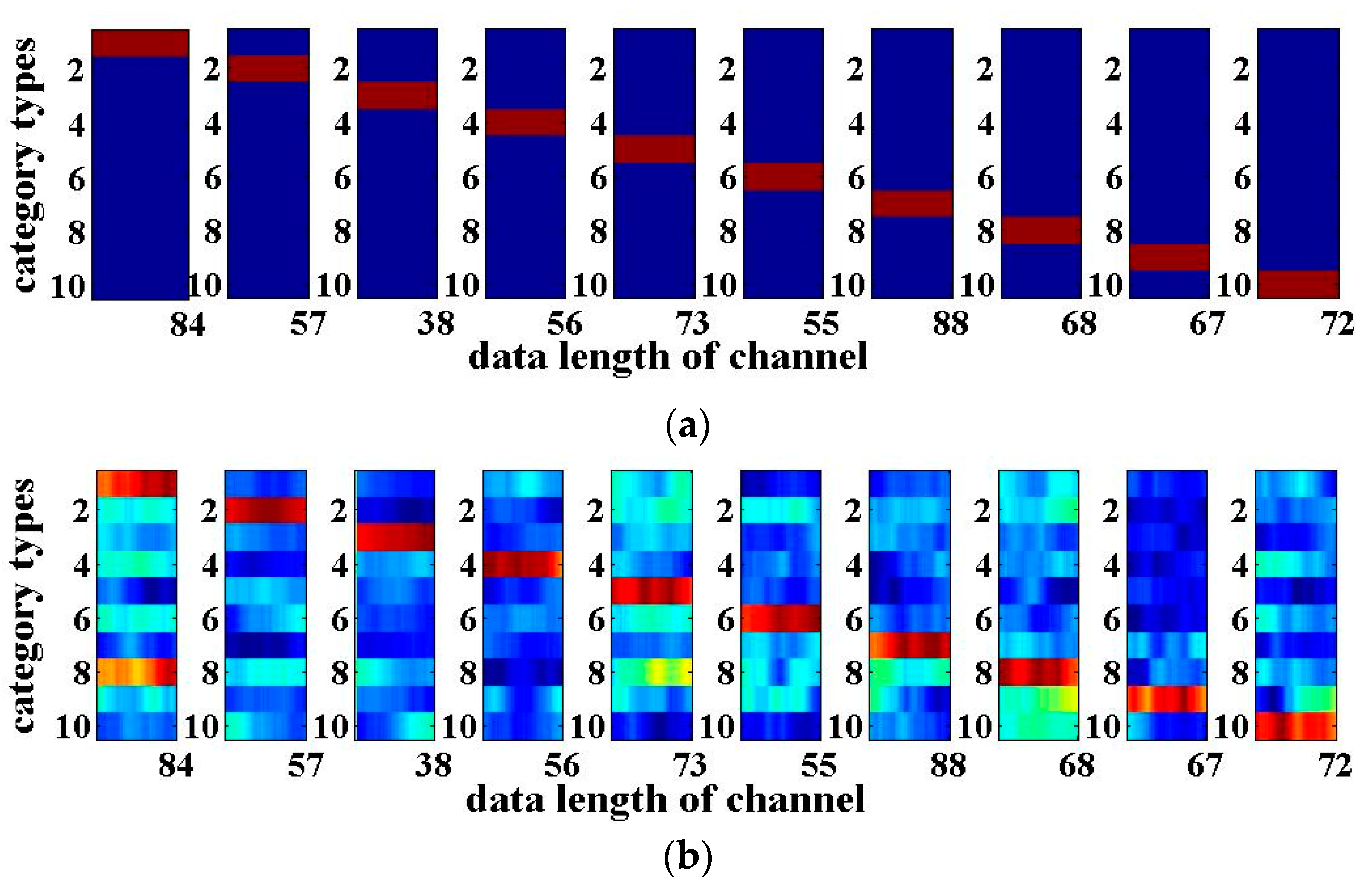
3.1. Four-Route Optical Packet Header Recognition
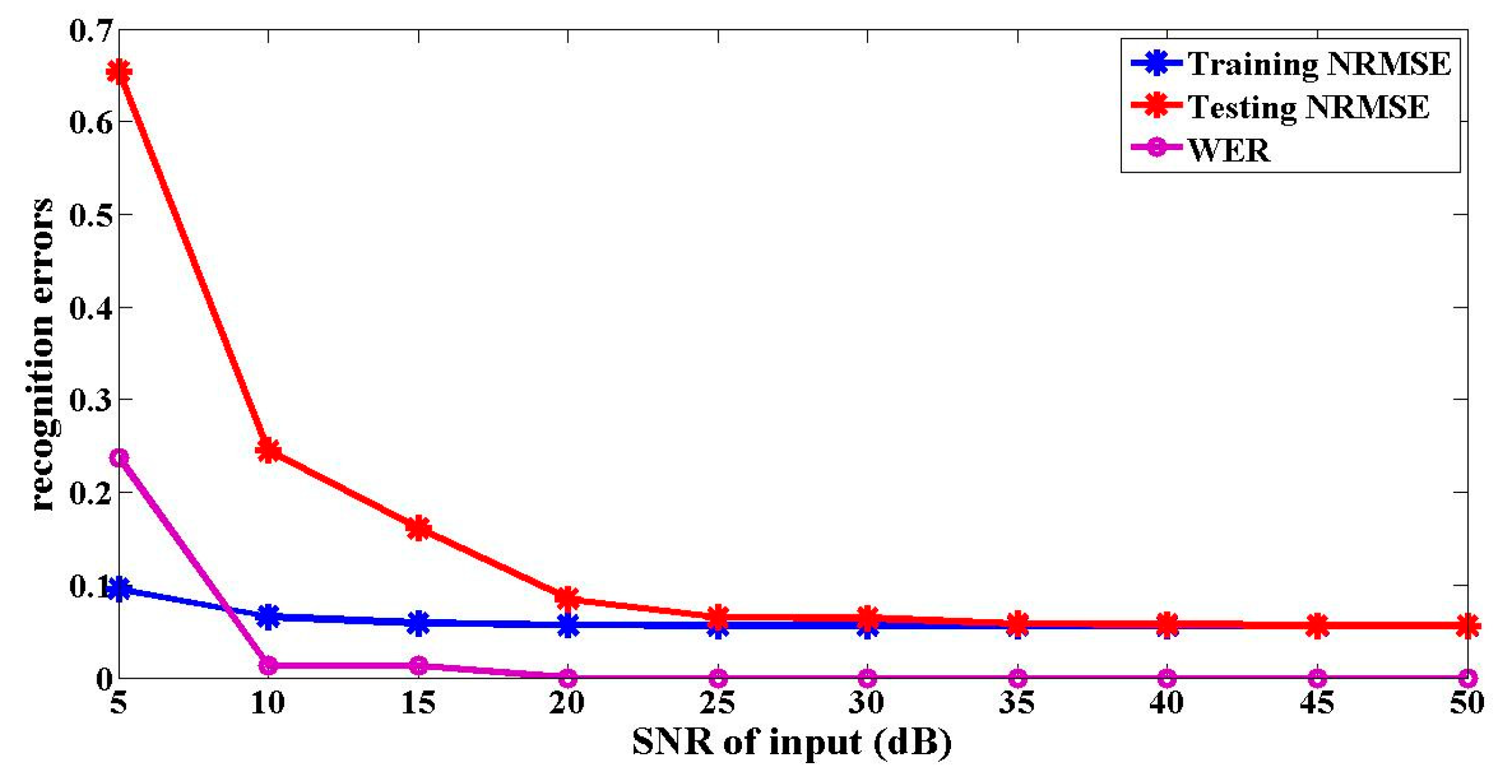
3.2. Digital Speech Recognition
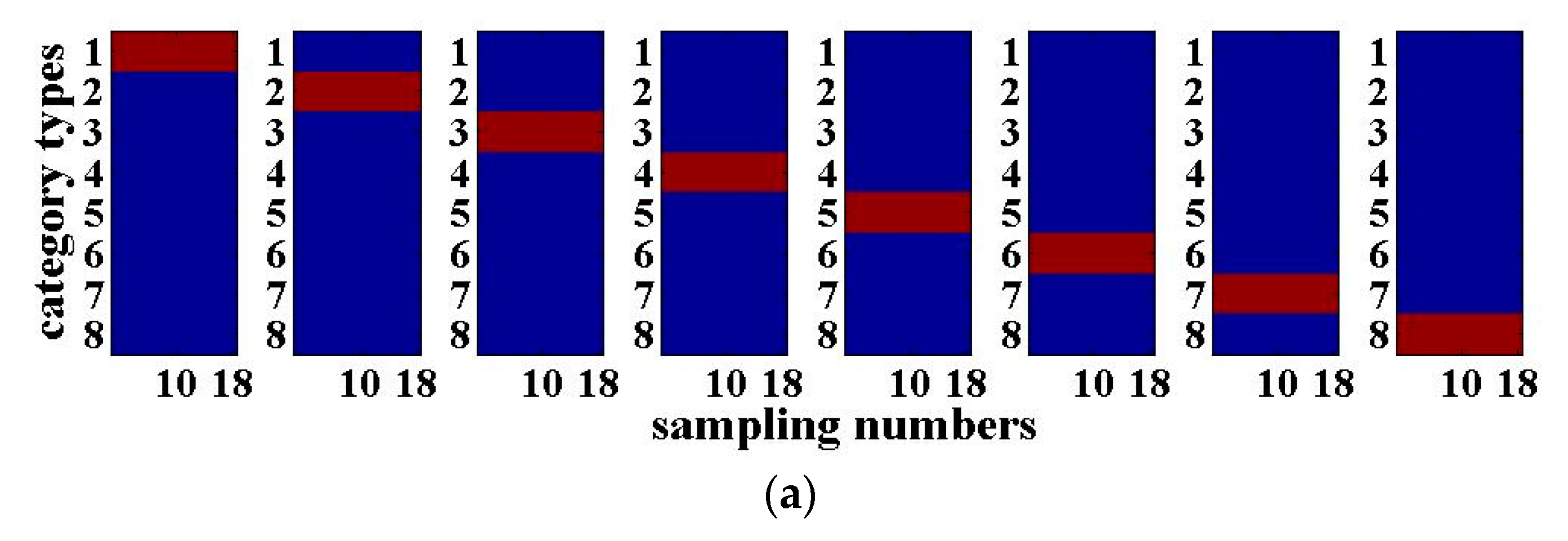
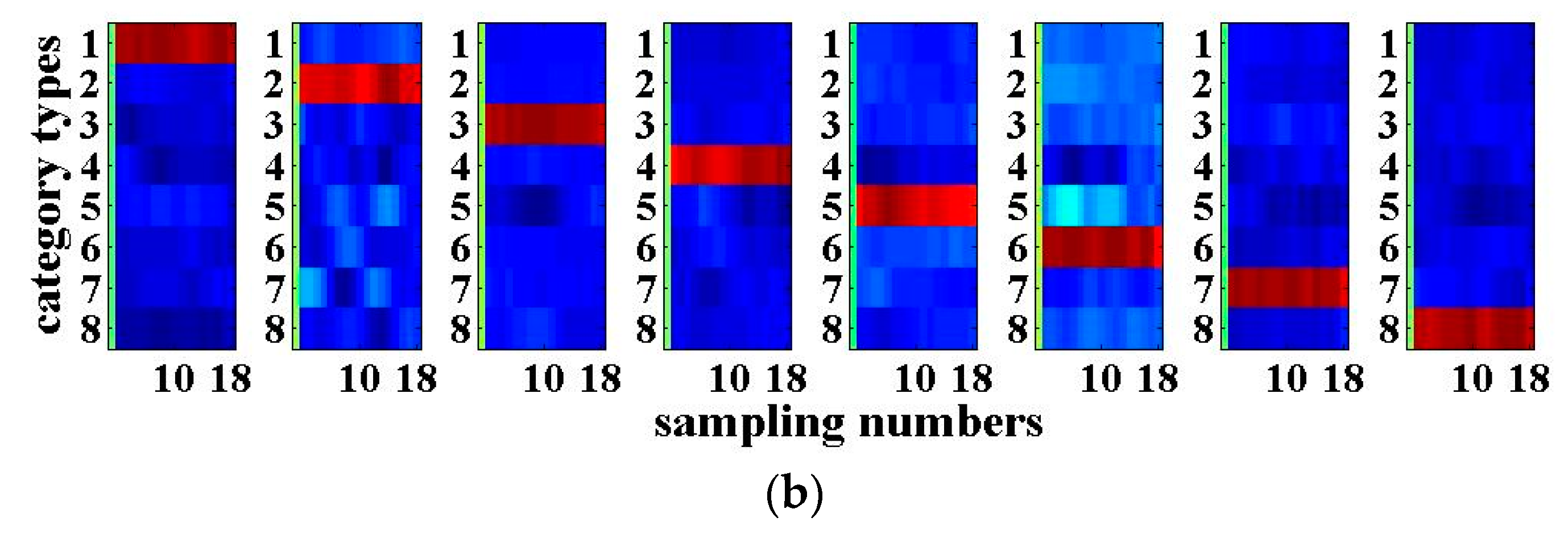
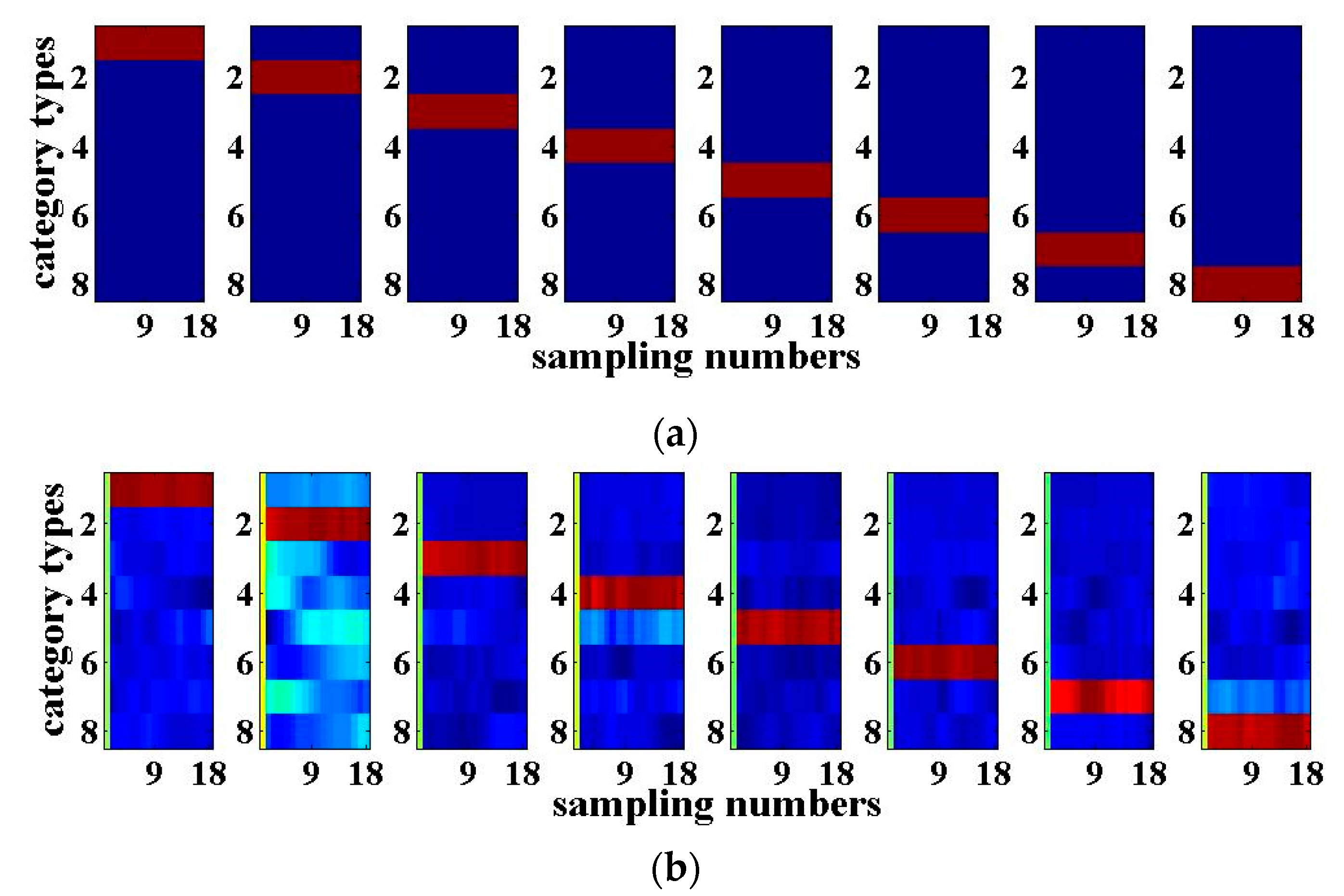
3.3. Eight-Input Eight-Output Optoelectronic RC
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hart, J.D.; Larger, L.; Murphy, T.E.; Roy, R. Delayed dynamical systems: Networks, chimeras and reservoir computing. Phil. Trans. R. Soc. A 2019, 377. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tanaka, G.; Yamane, T.; Héroux, J.B.; Nakane, R.; Kanazawa, N.; Takeda, S.; Numata, H.; Nakano, D.; Hirose, A. Recent advances in physical reservoir computing: A review. Neural Netw. 2019, 115, 100–123. [Google Scholar] [CrossRef] [PubMed]
- Gauthier, D.J. Reservoir computing: Harnessing a universal dynamical system. Phys. Rev. Lett. 2018, 120, 024102. [Google Scholar]
- Jiang, N.; Zhao, A.; Liu, S.; Xue, C.; Wang, B.; Qiu, K. Generation of broadband chaos with perfect time delay signature suppression by using self-phase-modulated feedback and a microsphere resonator. Opt. Lett. 2018, 43, 5359–5362. [Google Scholar] [CrossRef]
- Li, N.; Nguimdo, R.M.; Locquet, A.; Citrin, D.S. Enhancing optical-feedback-induced chaotic dynamics in semiconductor ring lasers via optical injection. Nonlinear Dyn. 2018, 92, 315–324. [Google Scholar] [CrossRef]
- Li, P.; Li, K.; Guo, X.; Guo, Y.; Liu, Y.; Xu, B.; Bogris, A.; Alan Shore, K.; Wang, Y. Parallel optical random bit generator. Opt. Lett. 2019, 44, 2446–2449. [Google Scholar] [CrossRef]
- Han, H.; Zhang, M.J.; Shore, K.A. Chaos Bandwidth Enhancement of Fabry–Pérot Laser Diode With Dual-Mode Continuous-Wave Optical Injection. IEEE J. Quantum Electron. 2019, 55, 1–8. [Google Scholar] [CrossRef]
- Paquot, Y.; Dambre, J.; Schrauwen, B.; Haelterman, M.; Massar, S. Reservoir computing: A photonic neural network for information processing. J. Nonlinear Opt. Appl. IV 2010, 7728, 1–33. [Google Scholar]
- Duport, F.; Schneider, B.; Smerieri, A.; Haelterman, M.; Massar, S. All-optical reservoir computing. Opt. Exp. 2012, 20, 22783–22795. [Google Scholar] [CrossRef]
- Hicke, K.; Escalona-Morán, M.A.; Brunner, D.; Soriano, M.C.; Fischer, I.; Mirasso, C.R. Information processing using transient dynamics of semiconductor lasers subject to delayed feedback. IEEE J. Sel. Top. Quantum Electron. 2013, 19. [Google Scholar] [CrossRef] [Green Version]
- Nguimdo, R.M.; Danckaert, J.; Verschaffelt, G.; Van der Sande, G. Delay-based reservoir computing using semiconductor ring lasers. Nonlinear Opt. Appl. VIII Quantum Opt. III Int. Soc. Opt. Photonics 2014, 9136. [Google Scholar] [CrossRef]
- Martinenghi, R.; Fuentes, A.B.; Jacquot, M.; Chembo, Y.K.; Larger, L. Towards Optoelectronic Architectures for Integrated Neuromorphic Processors. Proc. SPIE Int. Soc. Opt. Eng. 2014, 8989. [Google Scholar] [CrossRef]
- Akrout, A.; Bouwens, A.; Duport, F.; Vinckier, Q.; Haelterman, M.; Massar, S. Parallel photonic reservoir computing using frequency multiplexing of neurons. arXiv 2016, arXiv:1612.08606. [Google Scholar]
- Brunner, D.; Soriano, M.C.; Mirasso, C.R.; Fischer, I. Parallel photonic information processing at gigabyte per second data rates using transient states. Nat. Commun. 2013, 4, 1364. [Google Scholar] [CrossRef] [Green Version]
- Nguimdo, R.M.; Verschaffelt, G.; Danckaert, J.; Van der Sande, G. Simultaneous computation of two independent tasks using reservoir computing based on a single photonic nonlinear node with optical feedback. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 3301–33078. [Google Scholar] [CrossRef]
- Van der Sande, G.; Nguimdo, R.M.; Verschaffelt, G. Parallel processing using an optical delay-based reservoir computer. Nonlinear Opt. Appl. IV Int. Soc. Opt. Photonics 2016, 9894. [Google Scholar] [CrossRef]
- Tan, X.; Hou, Y.; Wu, Z.; Xia, G. Parallel information processing by a reservoir computing system based on a VCSEL subject to double optical feedback and optical injection. Opt. Exp. 2019, 27, 26070–26079. [Google Scholar] [CrossRef]
- Bao, X.; Zhao, Q.; Yin, H. Efficient optoelectronic reservoir computing with three-route input based on optical delay lines. Appl. Opt. 2019, 58, 4111–4117. [Google Scholar] [CrossRef]
- Bao, X.; Zhao, Q.; Yin, H.; Qin, J. Recognition of the optical packet header for two channels utilizing parallel reservoir computing based on a semiconductor ring laser. Mode. Phys. Lett. B 2018, 32. [Google Scholar] [CrossRef]
- Schumacher, J.; Toutounji, H.; Pipa, G. An Analytical Approach to Single Node Delay-Coupled Reservoir Computing. In Proceedings of the 23rd International Conference on Artificial Neural Network, Sofia, Bulgaria, 10–13 September 2013; pp. 26–33. [Google Scholar]
- Ortín, S.; Soriano, M.C.; Pesquera, L.; Brunner, D.; San-Martín, D.; Fischer, I.; Mirasso, C.R.; Gutiérrez, J.M. A Unified Framework for Reservoir Computing and Extreme Learning Machines based on a Single Time-delayed Neuron. Sci. Rep. 2015, 5. [Google Scholar] [CrossRef] [Green Version]
- Larger, L.; Baylón-Fuentes, A.; Martinenghi, R.; Udaltsov, V.S.; Chembo, Y.K.; Jacquot, M. High-Speed Photonic Reservoir Computing Using a Time-Delay-Based Architecture: Million Words per Second Classification. Phys. Rev. X 2017, 7. [Google Scholar] [CrossRef]
- Nguimdo, R.M.; Verschaffelt, G.; Danckaert, J.; Sande, G.V.D. Reducing the phase sensitivity of laser-based optical reservoir computing systems. Opt. Exp. 2016, 24, 1238–1252. [Google Scholar] [CrossRef] [PubMed]
- Antonelo, E.A.; Schrauwen, B.; Stroobandt, D. Event detection and localization for small mobile robots using reservoir computing. Neural Netw. 2008, 21, 862–871. [Google Scholar] [CrossRef] [Green Version]
- Paquot, Y.; Duport, F.; Smerieri, A.; Dambre, J.; Schrauwen, B.; Haeltermanl, M. Optoelectronic reservoir computing. Sci. Rep. 2012, 2, 287. [Google Scholar] [CrossRef]
- Guo, X.; Liu, R.; Li, P.; Cheng, C.; Wu, M.; Guo, Y. Enhancing Extractable Quantum Entropy in Vacuum-Based Quantum Random Number Generator. Entropy 2018, 20, 819. [Google Scholar] [CrossRef] [Green Version]
- O’Mahony, M.J.; Simeonidou, D.; Hunter, D.K.; Tzanakaki, A. The application of optical packet switching in future communication networks. IEEE Commun. Mag. 2001, 39, 128–135. [Google Scholar] [CrossRef]
- Wang, N.; Fang, N.; Wang, L. Intrusion recognition method based on echo state network for optical fiber perimeter security systems. Opt. Commun. 2019, 451, 301–306. [Google Scholar] [CrossRef]
- Texas Instruments-Developed 46-Word Speaker-Dependent Isolated Word Corpus (TI46), NIST Speech Disc 7-1.1 (1 disc). Available online: http://www.speech.cs.cmu.edu/comp.speech (accessed on 17 February 2020).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| ϕi | offset phase of the MZM | –π/4 |
| τHi | high-frequency cutoff characteristic time | 19.89 ps |
| τLi | low-frequency cutoff characteristic time | 51.34 ps |
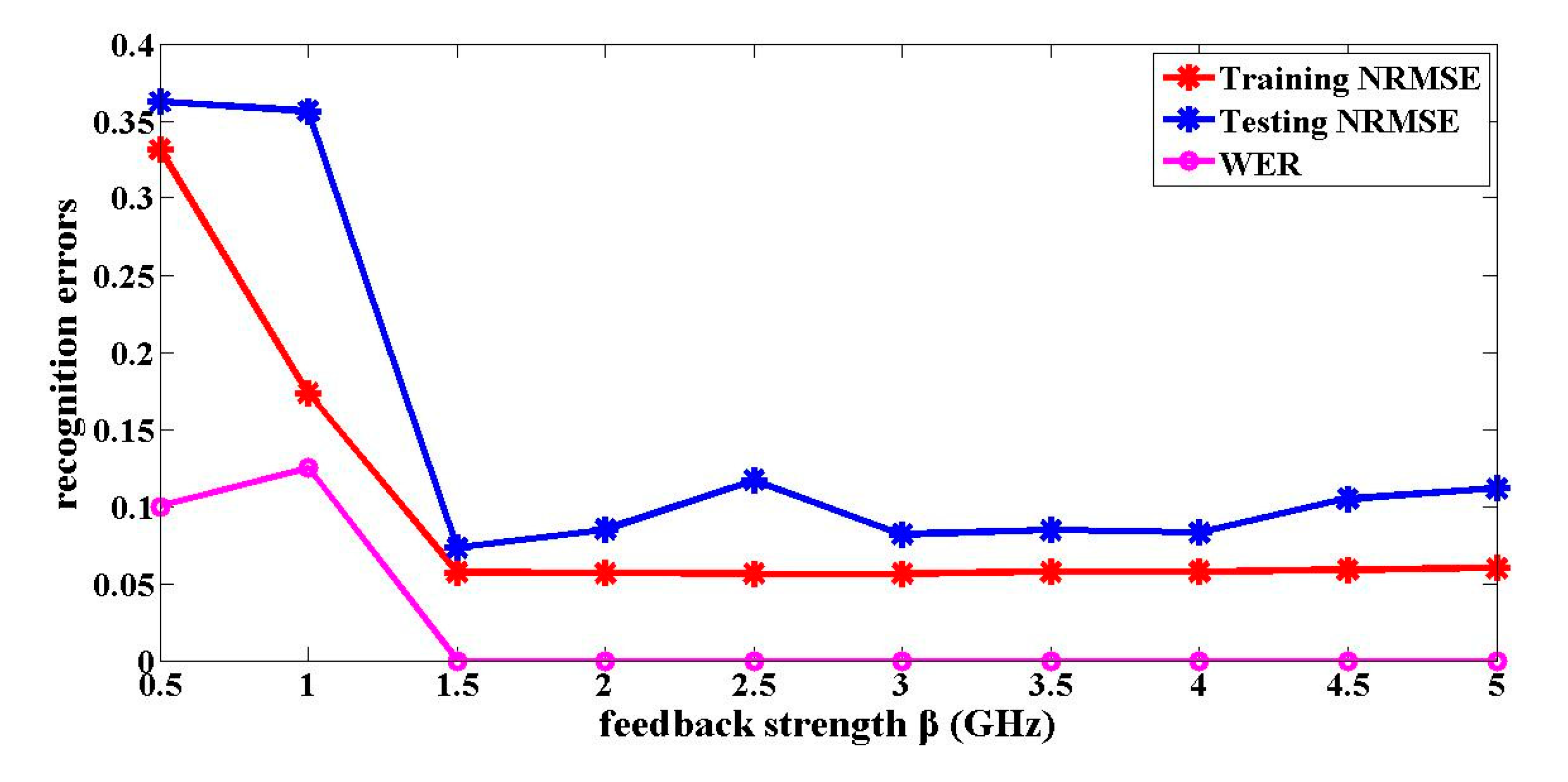
| βi | feedback strength | 0.5~5 GHz |
| τi | feedback delay time | 2.5 ns |
| γi | input gain | 1 |
| 35 dB of SNR | 8-bit Optical Packet Header Recognition | 16-bit Optical Packet Header Recognition | 32-bit Optical Packet Header Recognition | ||||
|---|---|---|---|---|---|---|---|
| 20 dB of SNR | |||||||
| Training NRMSE | 0.04880 | 0.0879 | 0.0953 | ||||
| 0.0568 | 0.2003 | 0.2553 | |||||
| Testing NRMSE | 0.0870 | 0.1977 | 0.1650 | ||||
| 0.0954 | 0.3605 | 0.3725 | |||||
| WER | 0% | 0% | 0% | ||||
| 0% | 0% | 0% | |||||
| SNR of Input | Without Noise | 30 dB | 20 dB | 10 dB |
|---|---|---|---|---|
| Training NRMSE | 0.0509 | 0.0717 | 0.0729 | 0.1128 |
| Testing NRMSE | 0.1051 | 0.1136 | 0.1195 | 0.2485 |
| WER | 1.4% | 1.6% | 1.6% | 14.6% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bao, X.; Zhao, Q.; Yin, H. A Multiple-Input Multiple-Output Reservoir Computing System Subject to Optoelectronic Feedbacks and Mutual Coupling. Entropy 2020, 22, 231. https://doi.org/10.3390/e22020231
Bao X, Zhao Q, Yin H. A Multiple-Input Multiple-Output Reservoir Computing System Subject to Optoelectronic Feedbacks and Mutual Coupling. Entropy. 2020; 22(2):231. https://doi.org/10.3390/e22020231
Chicago/Turabian StyleBao, Xiurong, Qingchun Zhao, and Hongxi Yin. 2020. "A Multiple-Input Multiple-Output Reservoir Computing System Subject to Optoelectronic Feedbacks and Mutual Coupling" Entropy 22, no. 2: 231. https://doi.org/10.3390/e22020231