1. Introduction
Environmental concerns have contributed to the development of the exploitation of marine energies to produce electrical energy using marine current turbines (MCTs) [
1,
2]. Compared with wind turbines (WTs), MCTs are subject to more harsh operating conditions in the ocean. These conditions are likely to encourage the occurrence of failures [
3,
4,
5], among which mechanical ones are the most frequent [
6]. The detection of this kind of fault is delicate because of the frequent variation in the speed of sea currents. Indeed, this variation changes the rotating frequency of a turbine [
7,
8,
9]. Therefore, it is relevant to study how to extract imbalance fault features under variable velocity conditions to maintain the safe and stable operation of the MCTs.
Accelerometers and cameras have been used for MCT fault detection and diagnosis. Signal information processing techniques are used to extract fault features from vibration signals and images [
10,
11,
12,
13]. Xia et al. [
14] applied a modified convolutional neural network method to classify the bearing fault types. However, these methods require additional external equipment that must be installed in a harsh environment and may be in direct contact with seawater. Therefore, the cost of not only installation but also maintenance is high, as this equipment is prone to failure.
Therefore, the use of in-built sensors is highly preferable. Generator current sensors are already available for control purposes. Hence, motor stator current analysis (MCSA) is very prevalent for fault detection. A grey-box modelling technique for studying the swirl characteristics of gas turbine combustion systems was developed in [
15] by Zhang et al. The program successfully detected the compound faults of a gas turbine based on a temperature profile. Meanwhile, the speed of the marine current is complicated and changeable, which makes it difficult to establish a complete model of a marine current power generation system. Li et al. [
16] used a derivative method to highlight WTs’ blade imbalance fault characteristics. Zhang et al. [
17], Feng et al. [
18], and Deng et al. [
19] applied a Hilbert transform (HT) to retrieve an instantaneous frequency (IF) from which fault characteristics could be derived. Salameh et al. [
20] and Amirat et al. [
21] proposed a method based on empirical mode decomposition (EMD) filtering to demodulate generator stator current. The EMD method can reduce the disturbance information in a stator current signal due to turbulence and waves. Gong et al. proposed a new resampling method in [
22,
23] called the shaft rotating frequency (1P) invariant method that can retrieve a fault frequency under the condition of varying wind speed, but there is no criterion for determining the objective time indexes and stopping iteration. An imbalance fault indicator of wind turbine blade based on the Park’s vector transforms was presented in [
24]—however, variable wind speed was not considered. The d–q coordinate transformation method was used to find the fault features by Sheng et al. [
25] based on a position estimator. The square of the open-loop stator current was used for blade fault detection Pires et al. in [
26], but it required an efficient denoising method. Instantaneous power signal and electromagnetic torque signals were analyzed to extract blade imbalance fault characteristics (Xin et al. [
27] and Xu et al. [
28]). The method proposed by Tang et al. [
29] used WT (wavelet transform) to filter out the supply frequency of an MCT current; however, the tuning of the wavelet transform with a variable current flow was still unaddressed.
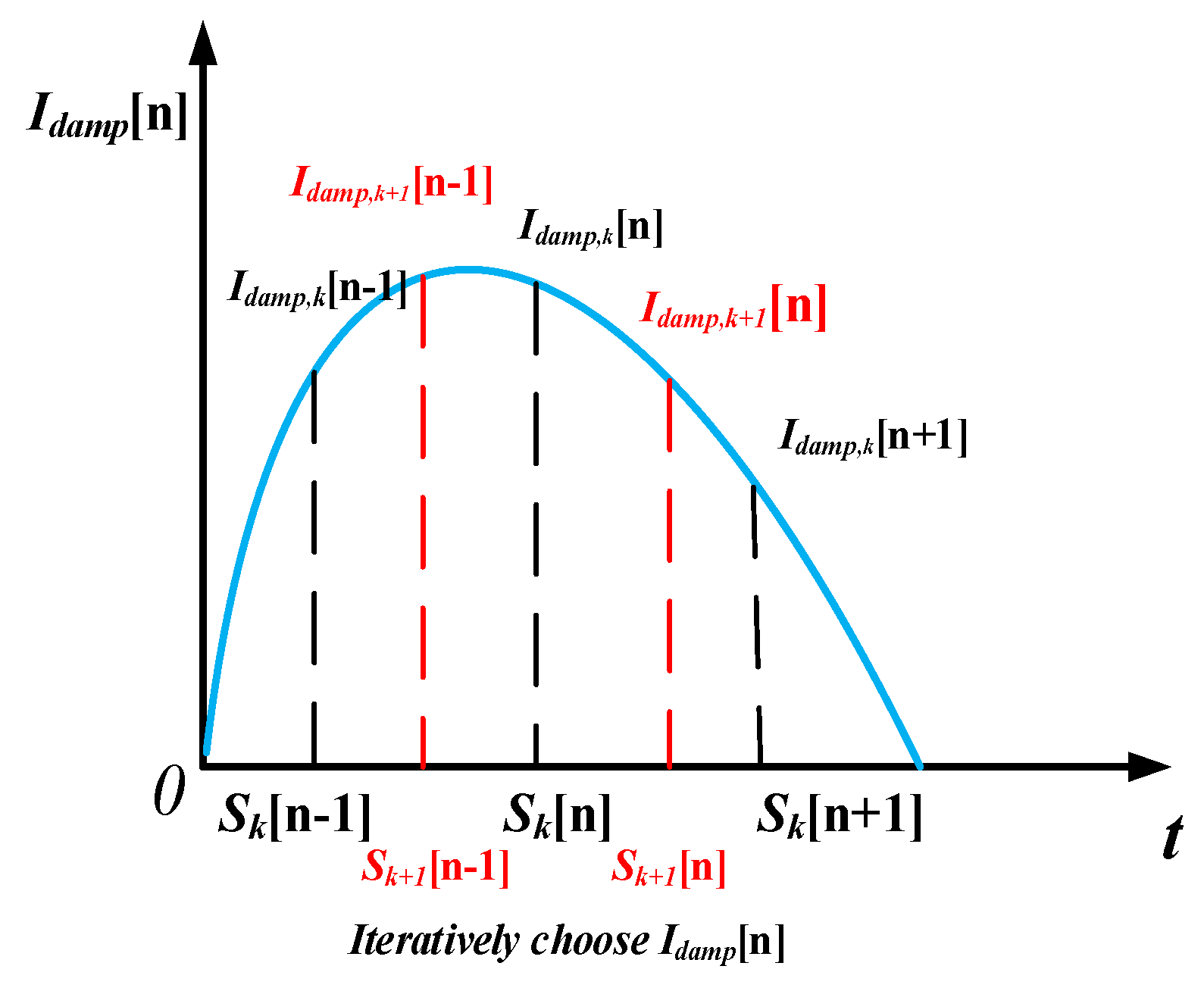
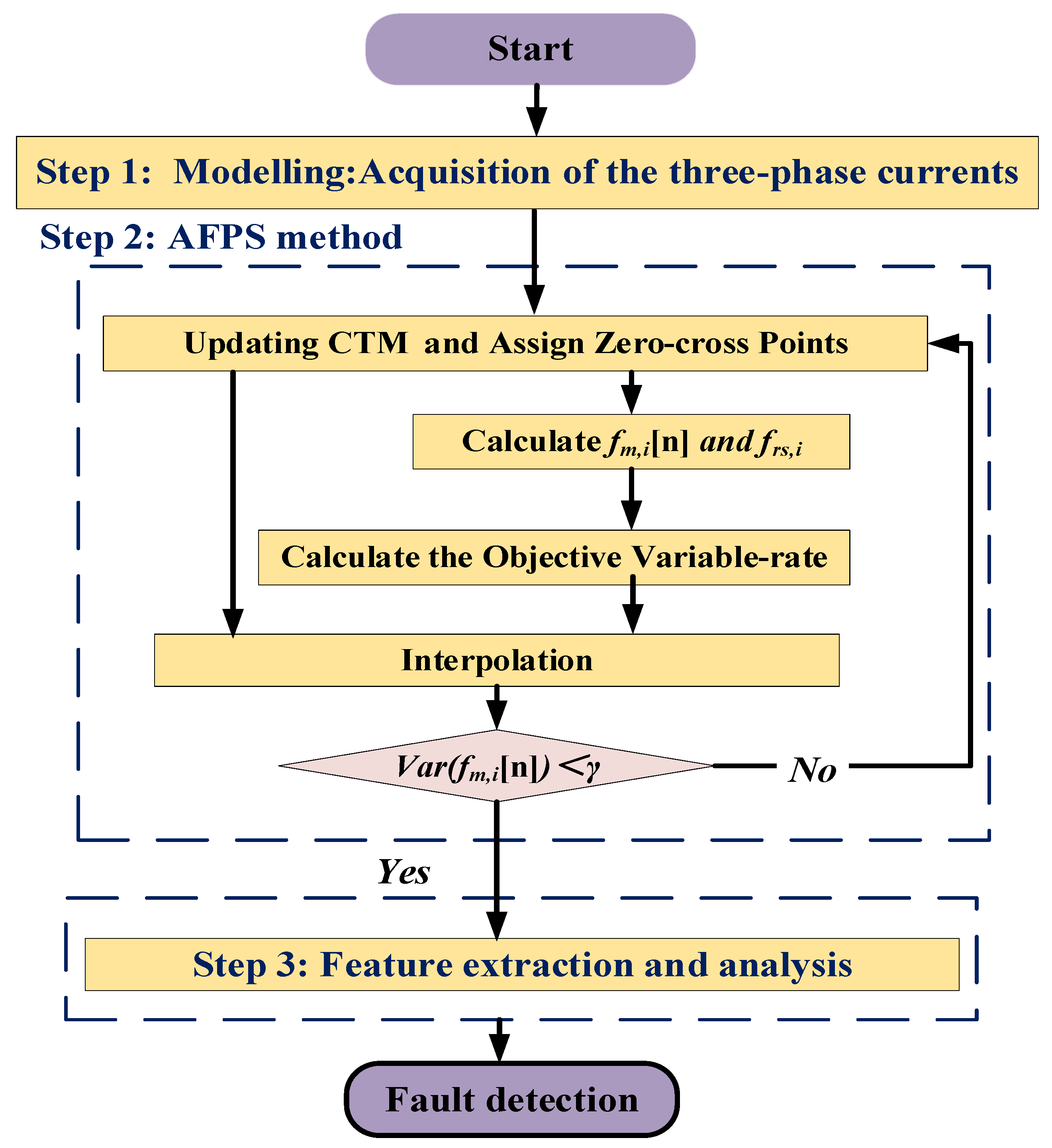
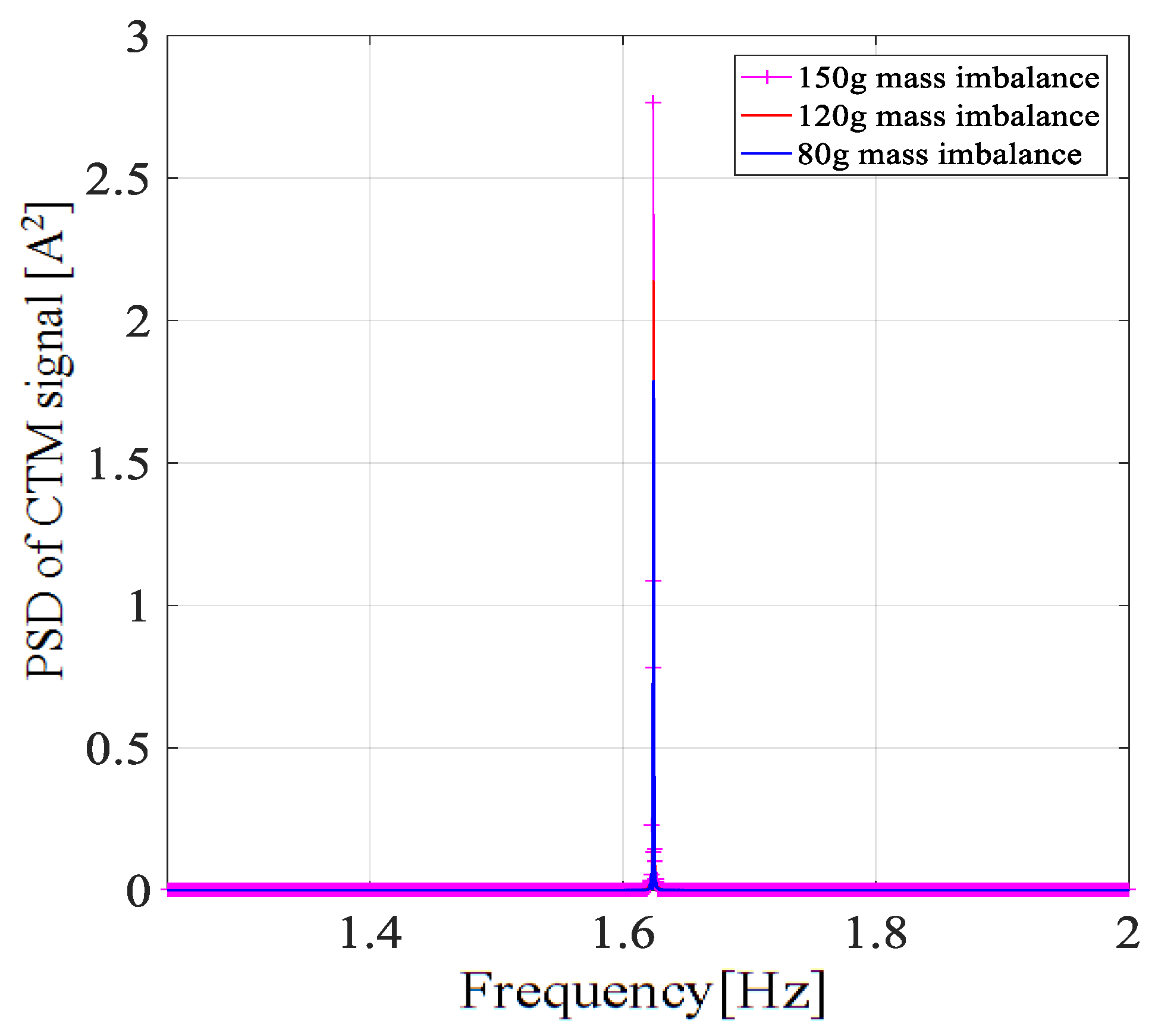
All the above studies rarely considered that the stator current exhibits a strong interference because of variable sea current speeds. The method proposed in this work takes advantage of the three-phase system and exploits all the available information. Hence, an adaptive frequency proportional sampling method was combined with the Concordia transform to extract the features of fault imbalance. This method does not require the phase information as a frequency proportion, and it can iteratively generate an optimal resampling rate. At first, the generator stator currents were measured and projected in a new reference frame using the Concordia transform to calculate the Concordia transform modules (CTMs). Second, to address the variable fault features, a novel adaptive proportional sampling frequency (APSF) method was proposed to obtain a stationary signal. Finally, imbalance fault detection was performed by a spectral analysis. Compared with the detection method using single-phase stator current or voltage, the proposed method can more effectively detect the imbalance fault under variable conditions.
The paper is organized as follows: In
Section 2, the detection problem is described.
Section 3 presents the proposed CT approach based on the APSF method.
Section 4 validates the proposed method through simulation and experimental results.
Section 5 concludes the paper.
5. Conclusions
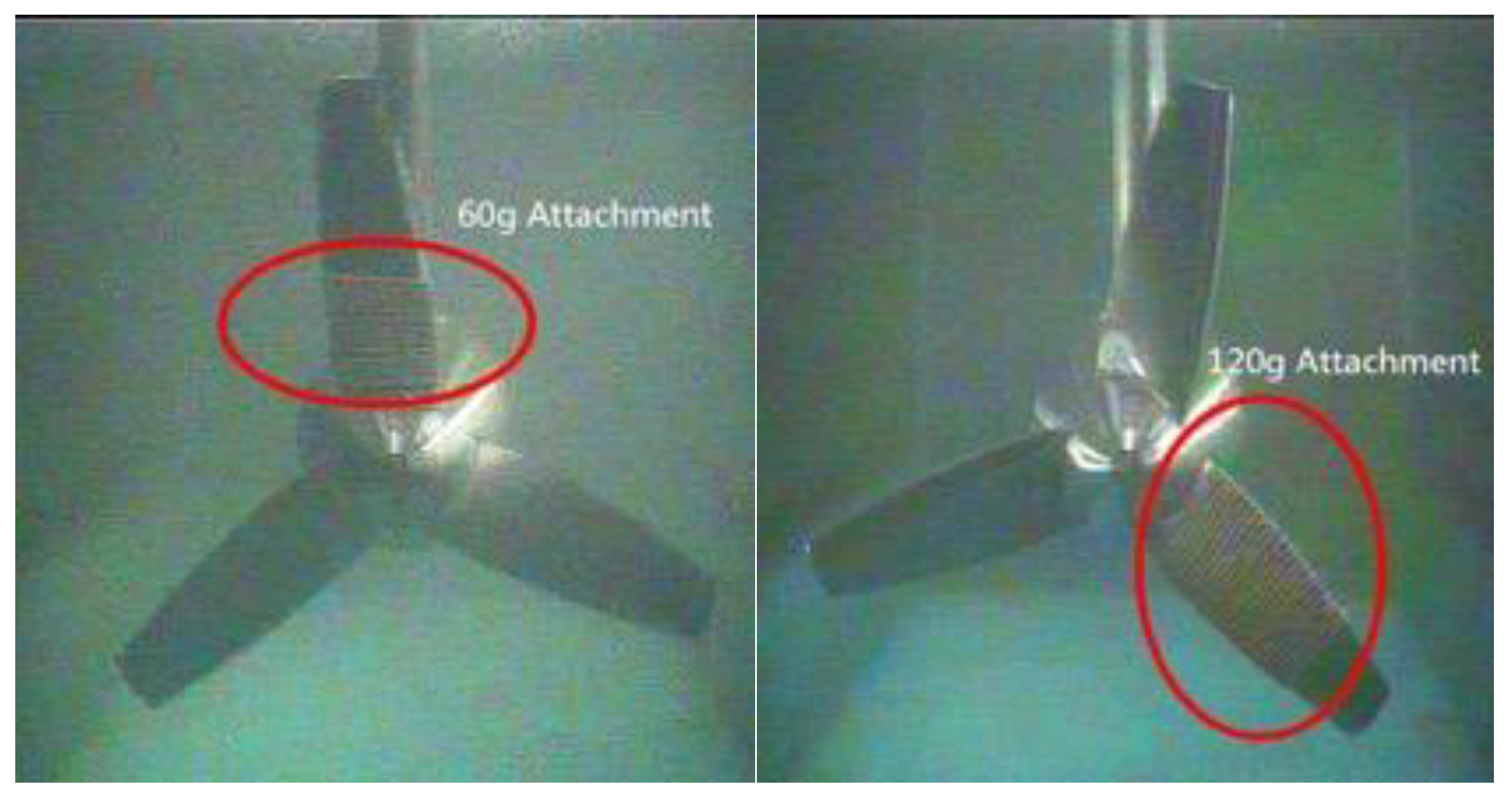
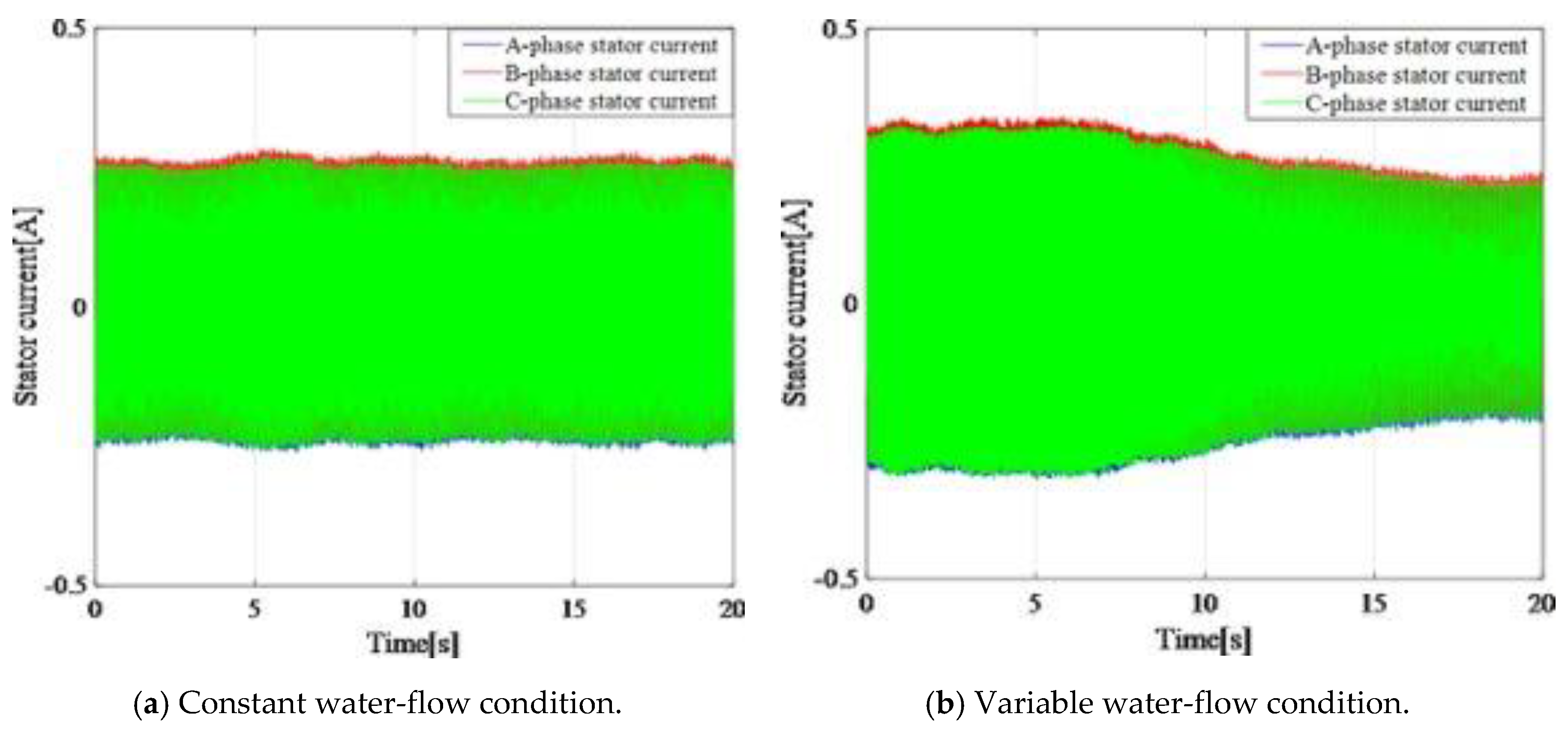
This work addressed marine current turbine blade imbalance fault detection. This fault due to marine attachments induces torque and speed oscillations. The fault can be detected through an analysis of the frequency spectrum of electrical signals. However, waves and turbulences combined with the natural marine flow speed make fault detection more difficult because fault characteristics are variable and may be concealed within environmental noise.
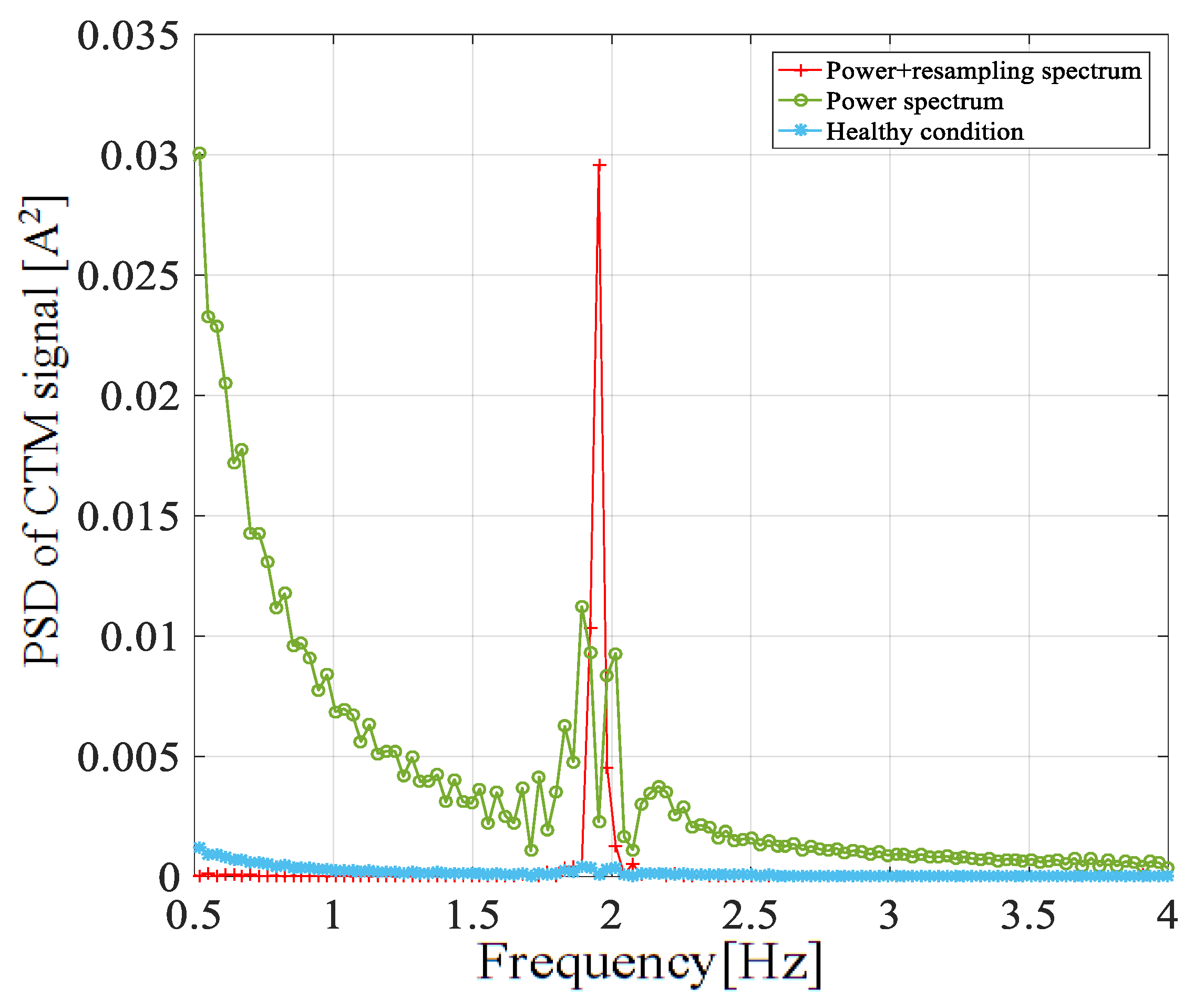
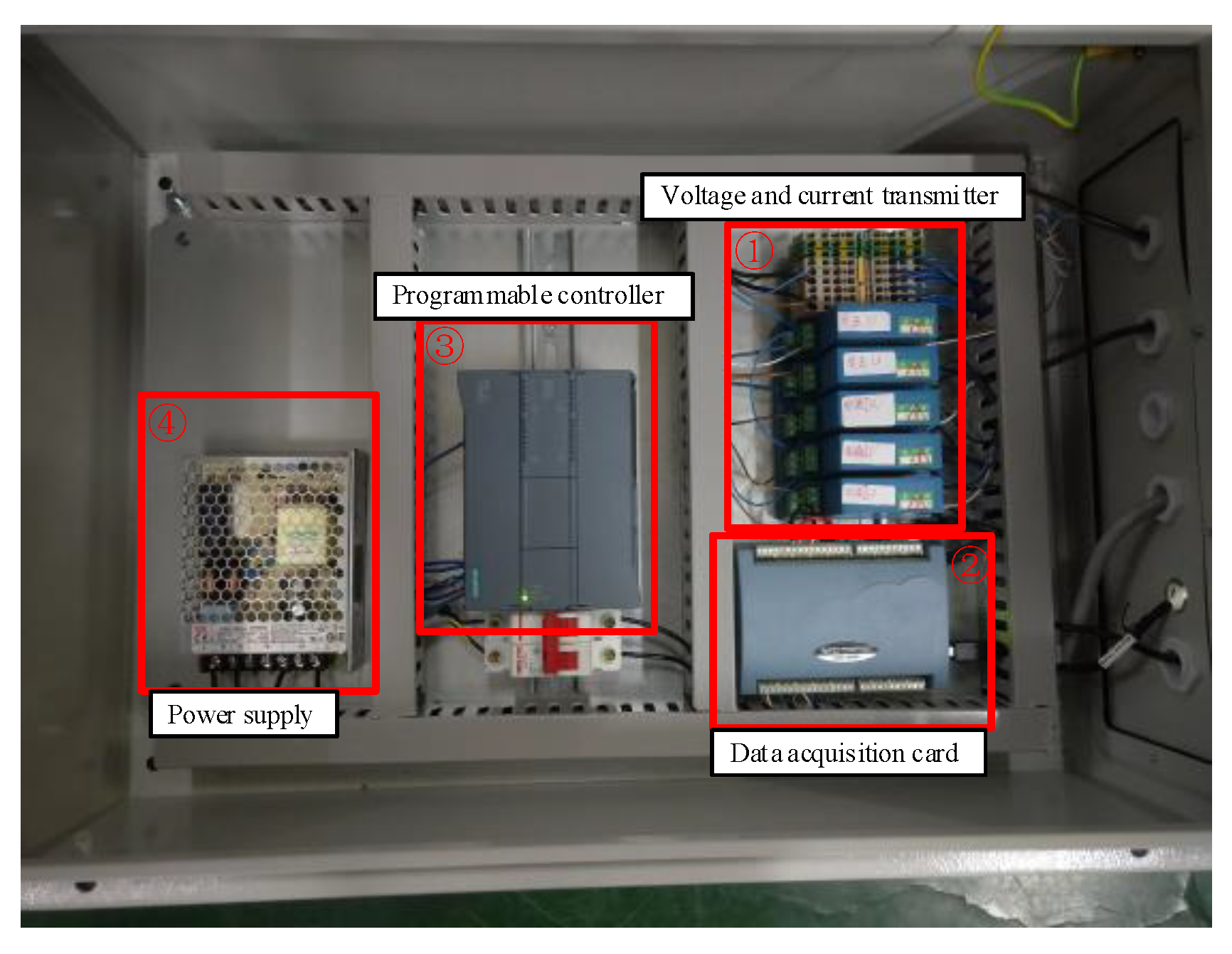
The methodology proposed in this paper takes the benefit of built-in current sensors and uses the three measured phase currents. The derivative of the current vector modulus in the Concordia reference frame is used as a fault feature because it is more sensitive to the 1P frequency that appears in the current spectrum during fault occurrence. The initial non-stationary signal is transformed into a stationary one thanks to an adaptive proportional frequency sampling technique. The fault indicator is based on the amplitude of the power spectrum density of the fault feature.
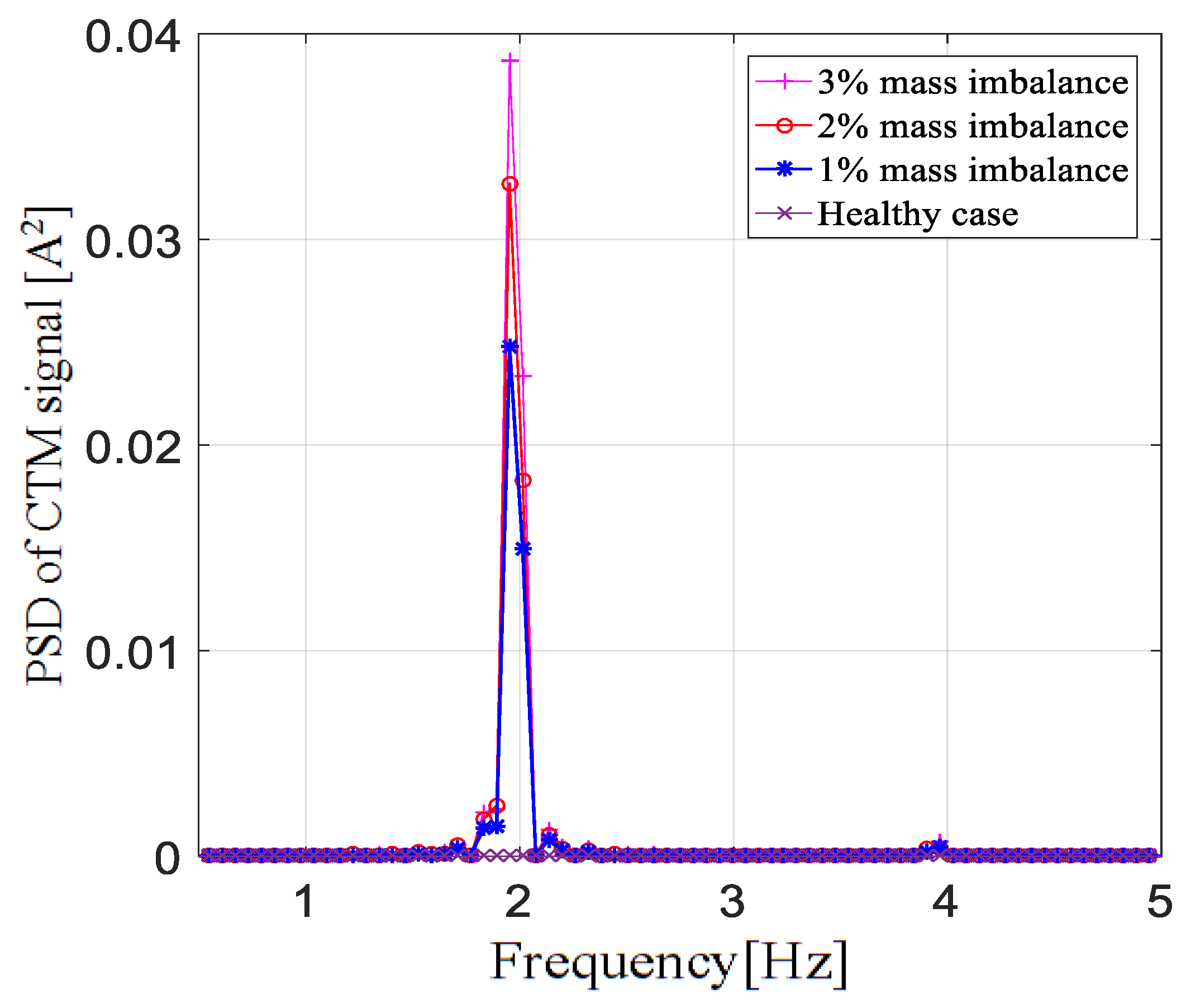
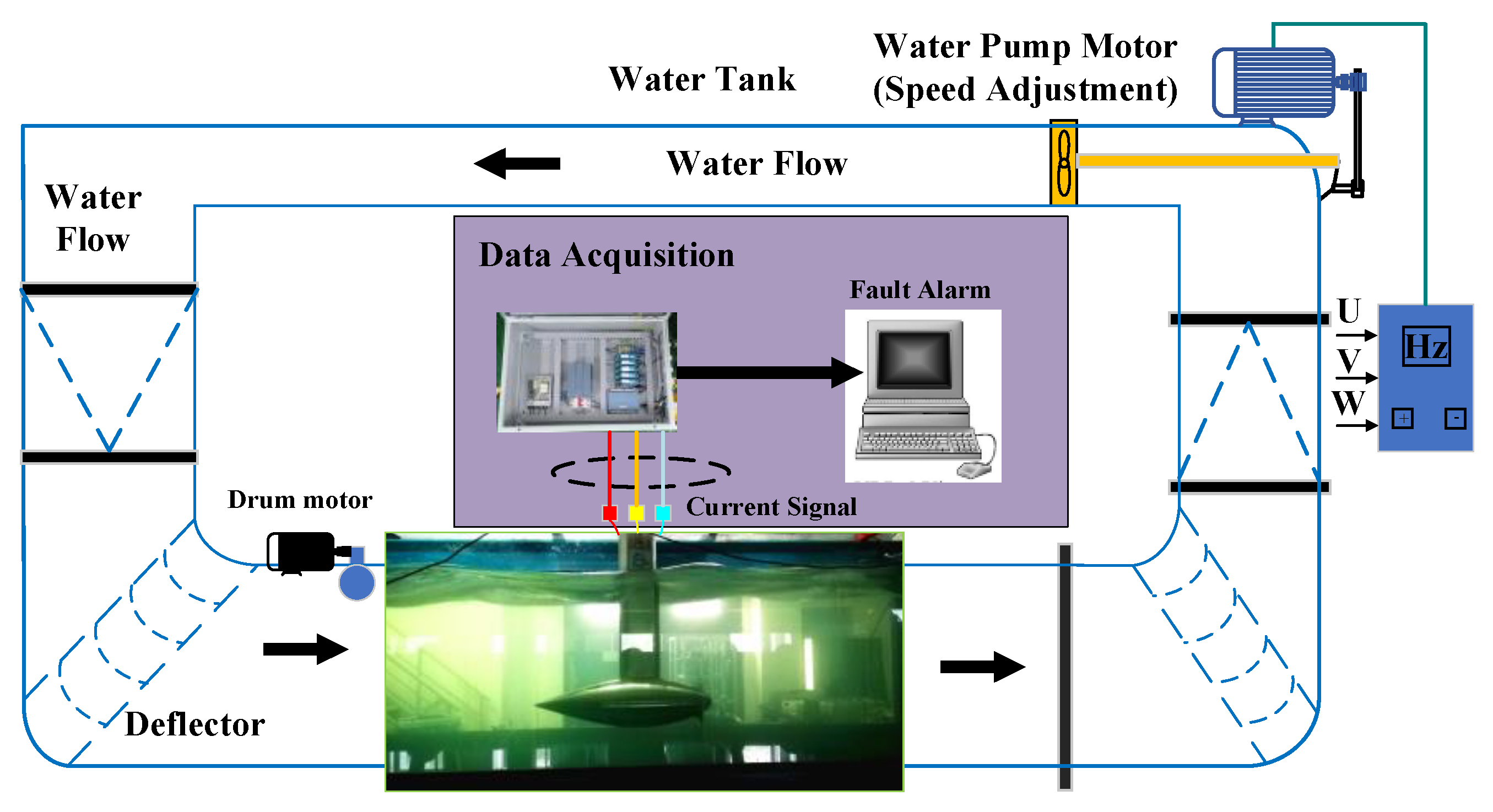
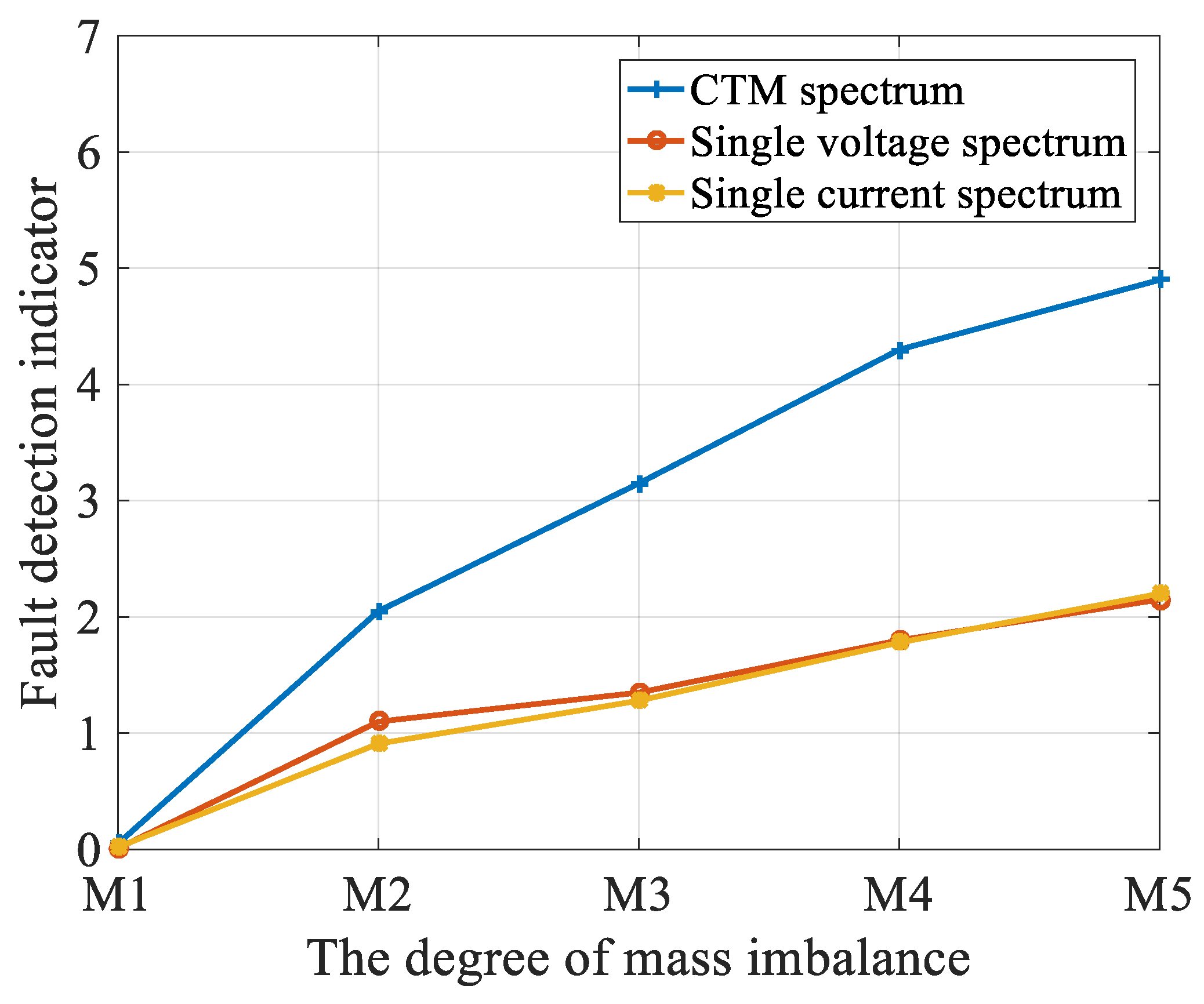
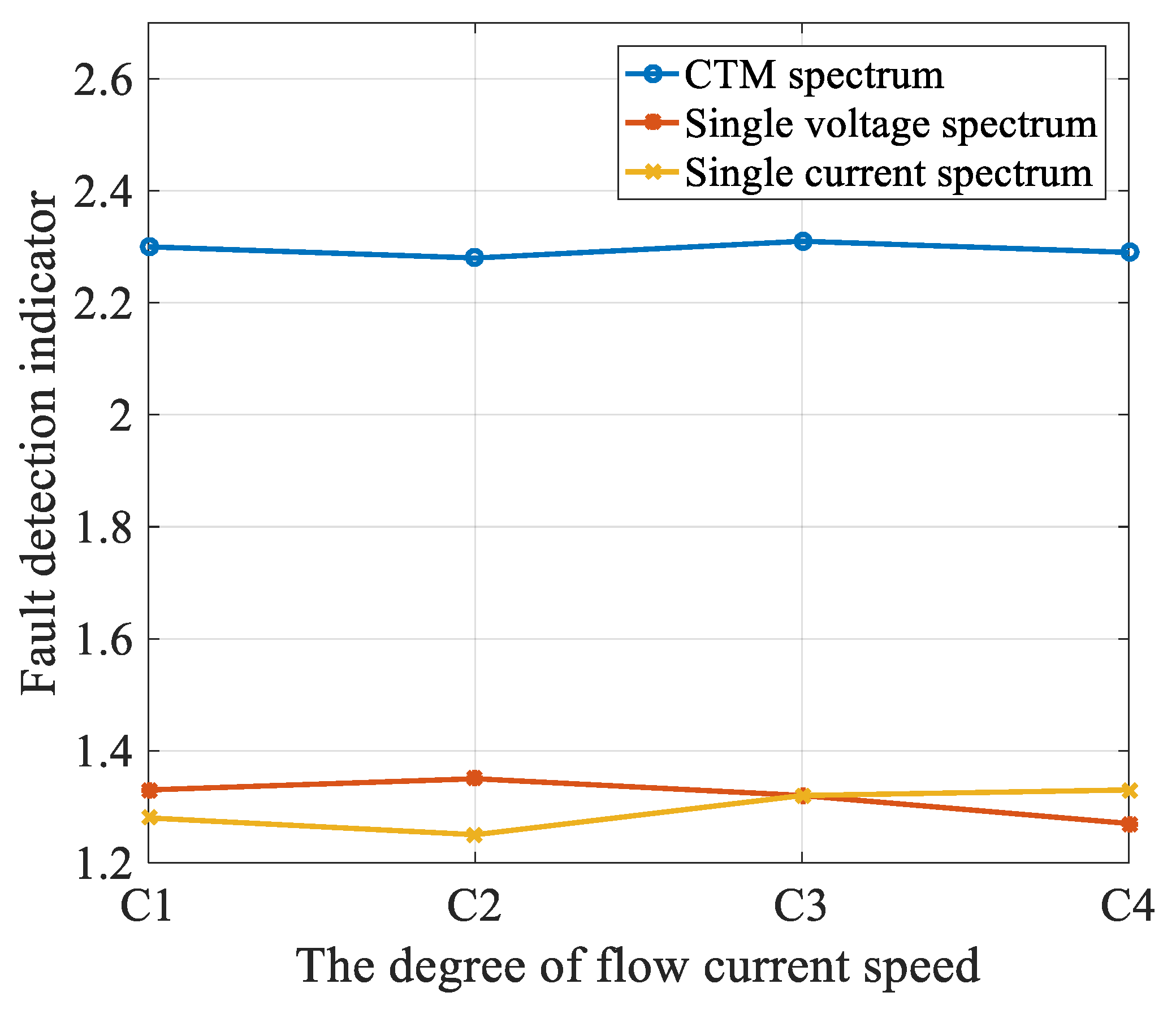
Simulation and experimental results from a test bed composed of a marine current turbine coupled to a 230 W permanent magnet synchronous generator showed the efficiency of the method to detect imbalance faults. As could be seen in a comparison with the methods using a single electrical information (phase current or voltage), the fault indicator based on the three currents was, on average, 2.2 times better at detection. The experimental results also showed that the fault indicator increased monotonically with the fault severity (with an additional mass of 80–220 g attached to blades), with a 1.8 times-higher variation rate. The results also showed that the method is robust are a variable flow current speed.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}