Time-Shift Multi-scale Weighted Permutation Entropy and GWO-SVM Based Fault Diagnosis Approach for Rolling Bearing

Abstract
:1. Introduction
2. Algorithm of TSMWPE
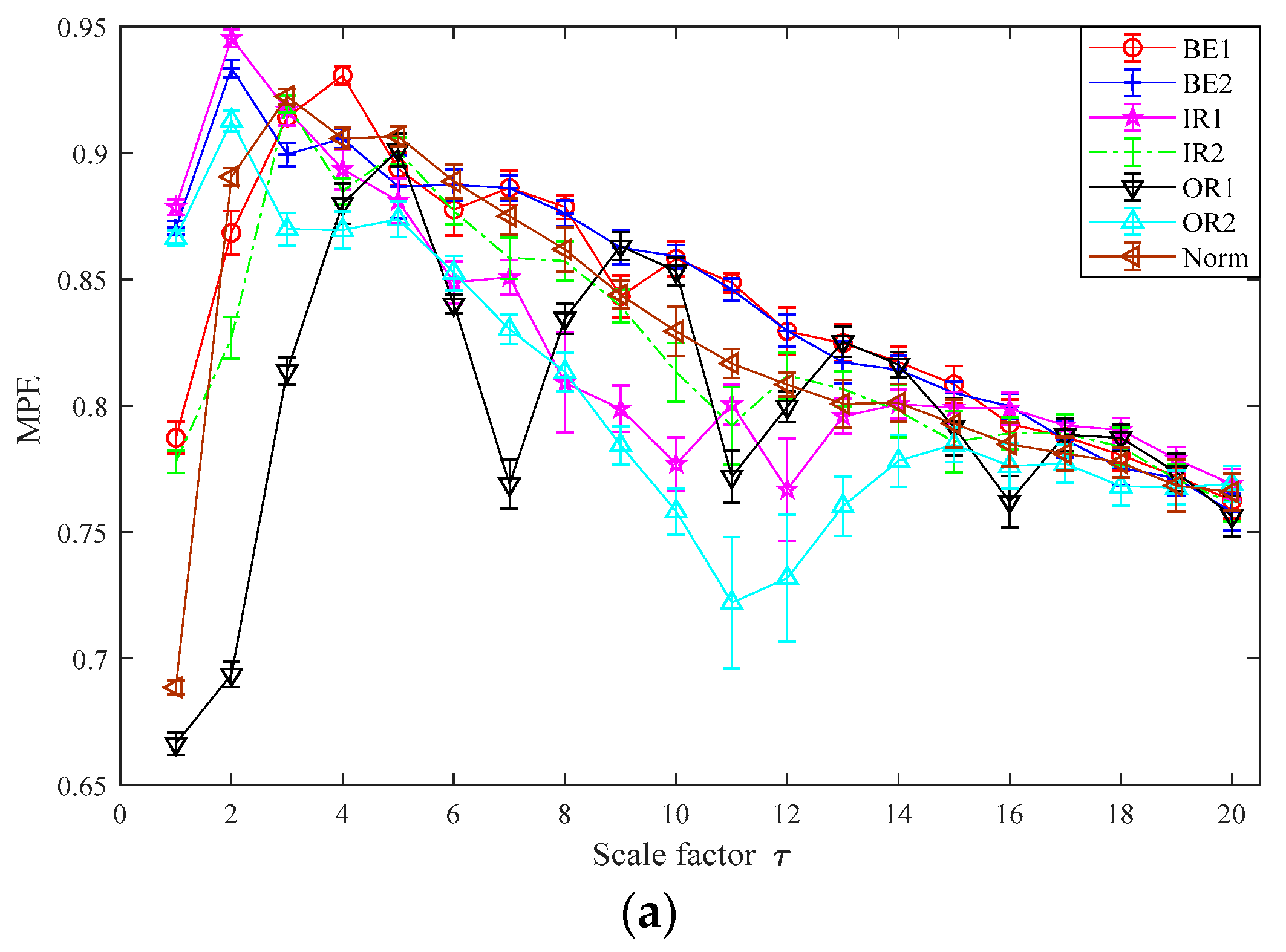
2.1. MPE method
- (1)
- For a given maximum scale factor , the coarse-grained time series can be constructed from the original time series by using formula (1)where j represents the length of coarse-grained time series.
- (2)
- For the scale factor , permutation entropy of each coarse-grained time series is calculated. Finally, the entropy values of all scales are obtained and seen as a function of the scale factor.
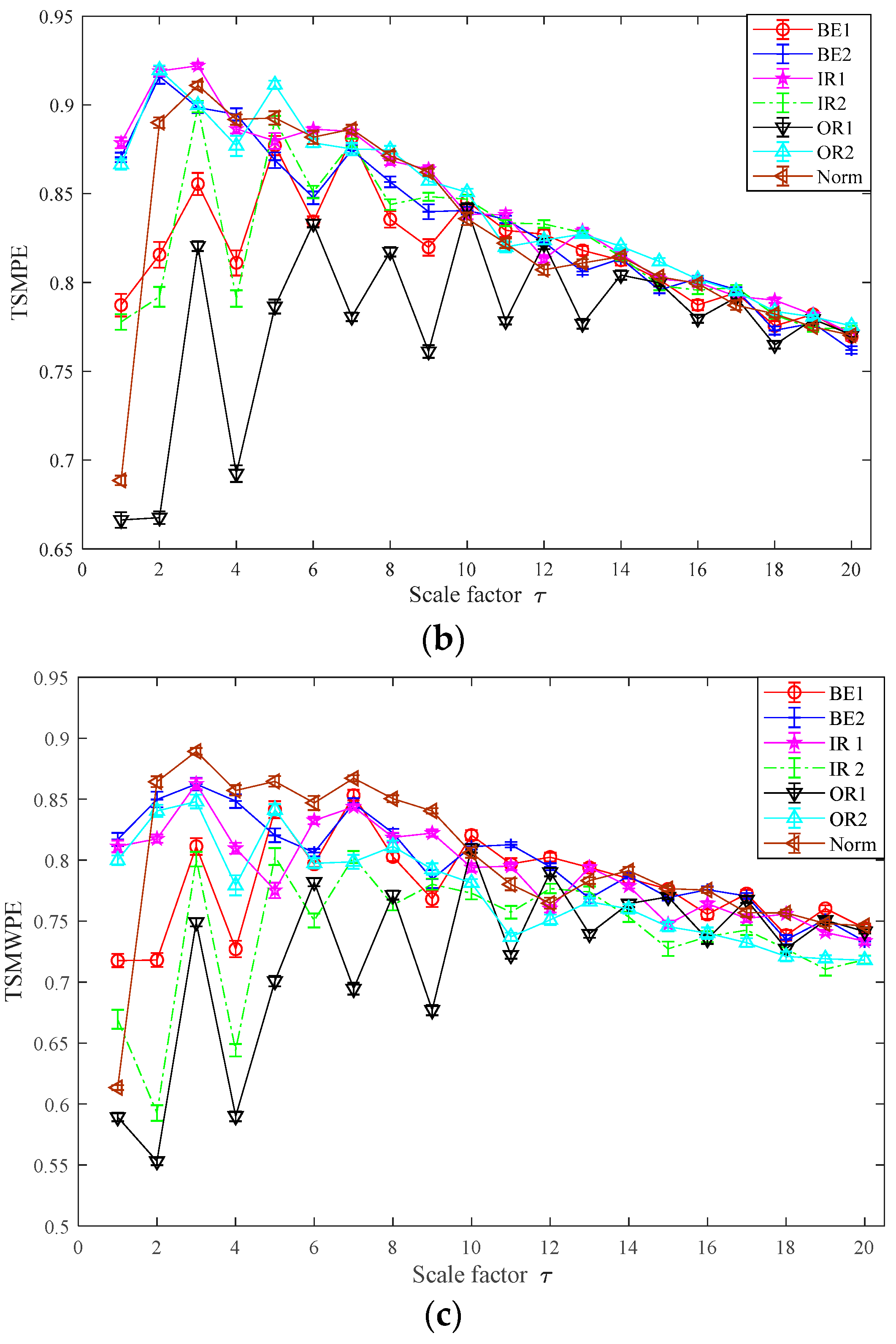
2.2. Algorithm of TSMPE
- (1)
- For a given time series , there arewhere the positive integers k () and β (), represents the start point and interval of time series. , indicating the upper boundary number, is a rounded integer.
- (2)
- For scale factor , the PEs of each time-shift coarse-grained time series are calculated. The obtained different PEs of each time-shift coarse-grained time series are averaged bywhere m is the embedding dimension and is delay time.
2.3. Algorithm of TSMWPE
- For the original time series , the process of time-shift coarse-grained time series can be obtained by Equation (2).
- Each row in this matrix is regarded as a state vector and each state vector is mapped into possible sorting mode , represents the frequency of the r-th permutation in the time series.where S is the number of possible patterns in the same motif. If the state vector can be mapped into the sort mode , will be obtained, otherwise . is denoted as variance of each vector. It represents the weight value for each same pattern, which has different amplitudes.
- The weighted relative probability of each state vector can be concluded by
- For time-shift coarse-grained time series, the weighted permutation entropy of each time-shift coarse-grained time series (TSMPE) can be defined as according to Shannon entropy as
- Finally, are obtained and final TSMWPE of original time series is described as
3. Analysis of Parameter Selection
3.1. Selection of Parameter m
3.2. Selection of Parameter
3.3. Selection of Parameter N
3.4. Stability Analysis
4. TSMWPE and GWO-SVM Based Fault Diagnosis Method for Rolling Bearing
4.1. GWO-SVM
4.2. The Proposed Fault Diagnosis Approach
- (1)
- Let the rolling bearing contains K class work conditions, N sets of samples are collected for each state. TSMWPE is computed for all samples of each state of rolling bearing in M scales. The TSMWPE values obtained are used as the sample feature information to form the original feature vector matrix .
- (2)
- For each state of rolling bearing, N samples are collected and I samples are selected from the N ones as training samples to form a feature training set () and the rest (N−I) ones are seen as testing samples to form the testing feature set ().
- (3)
- The training model feature set is employed to train the GWO-SVM based multi-classifier.
- (4)
- The testing sample feature set is inputting to the trained multi-classifier for prediction. The fault categories and severity of rolling bearing are judged according to the output of GWO-SVM multi-fault classifier. The flowchart of proposed method of fault diagnosis is shown in Figure 8.
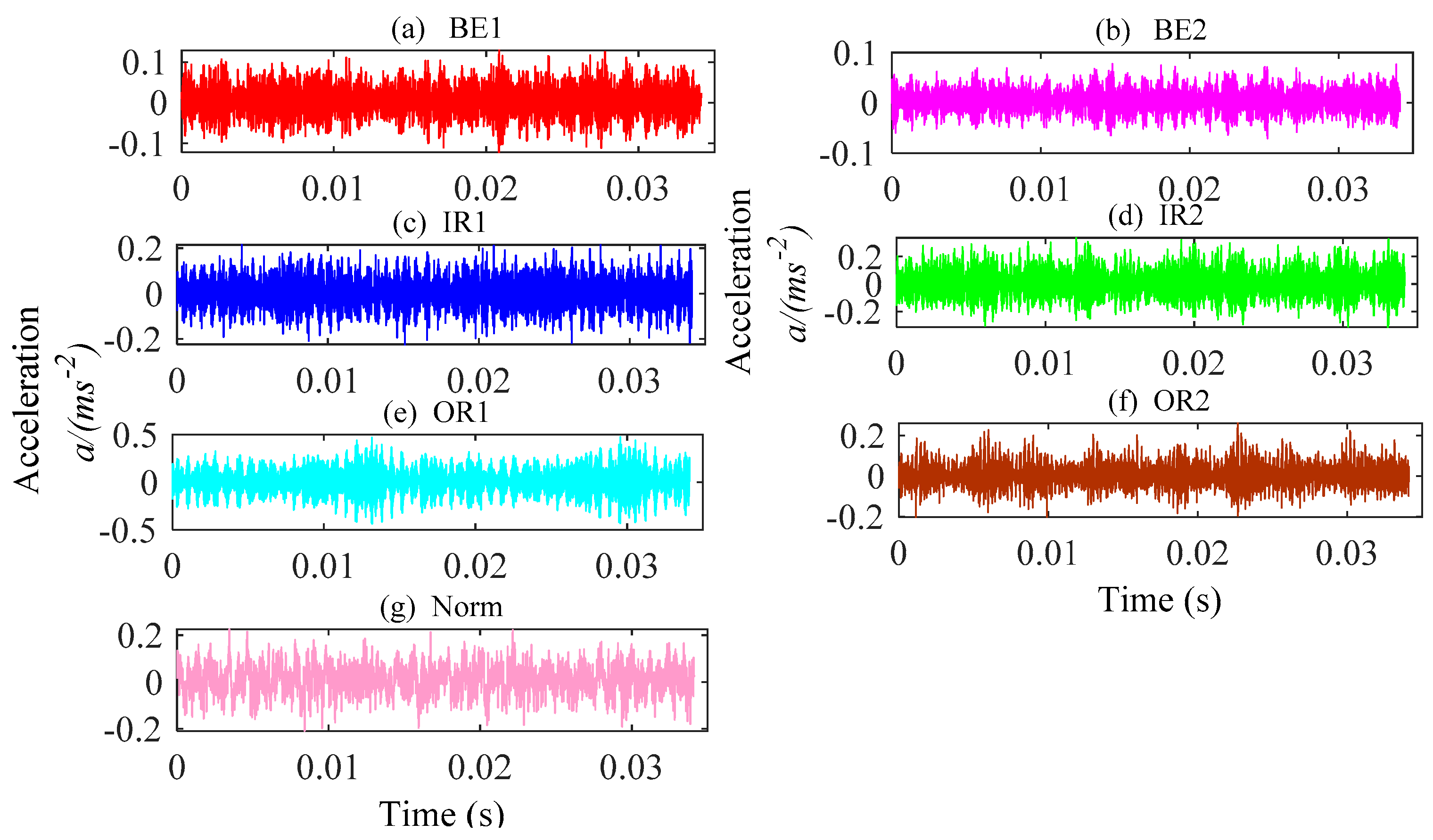
4.3. Experimental Analysis of Rolling Bearing
4.3.1. Case 1
4.3.2. Case 2
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhang, M.; Jiang, Z.; Feng, K. Research on variational mode decomposition in rolling bearings fault diagnosis of the multistage centrifugal pump. Mech. Syst. Sig. Process. 2017, 93, 460–493. [Google Scholar] [CrossRef] [Green Version]
- El-Thalji, I.; Jantunen, E. A summary of fault modelling and predictive health monitoring of rolling element bearings. Mech. Syst. Sig. Process. 2015, 60–61, 252–272. [Google Scholar] [CrossRef]
- Unal, M.; Onat, M.; Demetgul, M.; Kucuk, H. Fault diagnosis of rolling bearings using a genetic algorithm optimized neural network. Measurement 2014, 58, 187–196. [Google Scholar] [CrossRef]
- Ephraim, Y.; Malah, D. Speech enhancement using a minimum-mean square error short-time spectral amplitude estimator. IEEE Trans. Acoust. 1984, 32, 1109–1121. [Google Scholar] [CrossRef] [Green Version]
- Beneš, V.E. The Covariance Function of a Simple Trunk Group, with Applications to Traffic Measurement*. Bcl] Syst. Tech. J. 1961, 40, 117–148. [Google Scholar] [CrossRef]
- Cai, B.-J.; Chen, L.-W. Constraints on the skewness coefficient of symmetric nuclear matter within the nonlinear relativistic mean field model. Nucl. Sci. Tech. 2017, 28, 185. [Google Scholar] [CrossRef] [Green Version]
- Liu, P.; Huang, C.; Jiang, Y.; Zou, J. An Approach to Identify Inrush Current of Transformers Based on the Kurtosis Coefficient. Power System Tech. 2015, 39, 2023–2028. [Google Scholar]
- Fjordholm, U.S.; Käppeli, R.; Mishra, S.; Tadmor, E. Construction of Approximate Entropy Measure-Valued Solutions for Hyperbolic Systems of Conservation Laws. Found. Comput. Math. 2017, 17, 763–827. [Google Scholar] [CrossRef]
- Xiang, D.; Shuang, G.E. A model of fault feature extraction based on wavelet packet sample entropy and manifold learning. J. Vibration Shock 2014, 33, 1–5. [Google Scholar]
- Kuai, M.; Cheng, G.; Pang, Y.; Li, Y. Research of Planetary Gear Fault Diagnosis Based on Permutation Entropy of CEEMDAN and ANFIS. Sensors 2018, 18, 782. [Google Scholar] [CrossRef]
- Zheng, J.; Cheng, J.; Yang, Y. A rolling bearing fault diagnosis approach based on LCD and fuzzy entropy. Mech. Mach. Theory 2013, 70, 441–453. [Google Scholar] [CrossRef]
- Zhao, S.; Liang, L.; Xu, G.; Wang, J.; Zhang, W. Quantitative diagnosis of a spall-like fault of a rolling element bearing by empirical mode decomposition and the approximate entropy method. Mech. Syst. Sig. Process. 2013, 40, 154–177. [Google Scholar] [CrossRef]
- Zheng, J.; Cheng, J.; Yu, Y. A Rolling Bearing Fault Diagnosis Method Based on LCD and Permutation Entropy. J. Vibration Meas. Diagn. 2014, 34, 802–806. [Google Scholar]
- Wu, Y.; Shang, P.; Li, Y. Multiscale sample entropy and cross-sample entropy based on symbolic representation and similarity of stock markets. Commun. Nonlinear Sci. Numer. Simul. 2018, 56, 49–61. [Google Scholar] [CrossRef]
- Tang, L.; Lv, H.; Yu, L. An EEMD-based multi-scale fuzzy entropy approach for complexity analysis in clean energy markets. Appl. Soft Comput. 2017, 56, 124–133. [Google Scholar] [CrossRef]
- Humeau-Heurtier, A. The Multiscale Entropy Algorithm and Its Variants: A Review. Entropy 2015, 17, 3110–3123. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Cheng, J.; Yang, Y.; Luo, S. A rolling bearing fault diagnosis method based on multi-scale fuzzy entropy and variable predictive model-based class discrimination. Mech. Mach. Theory 2014, 78, 187–200. [Google Scholar] [CrossRef]
- Yasir, M.N.; Koh, B.-H. Data Decomposition Techniques with Multi-Scale Permutation Entropy Calculations for Bearing Fault Diagnosis. Sensors 2018, 18, 1278. [Google Scholar] [CrossRef]
- Zhu, X.; Zheng, J.; Pan, H.; Bao, J.; Zhang, Y. Time-Shift Multiscale Fuzzy Entropy and Laplacian Support Vector Machine Based Rolling Bearing Fault Diagnosis. Entropy 2018, 20, 602. [Google Scholar] [CrossRef]
- Bian, Z.; Ouyang, G.; Li, Z.; Li, Q.; Wang, L.; Li, X. Weighted-Permutation Entropy Analysis of Resting State EEG from Diabetics with Amnestic Mild Cognitive Impairment. Entropy 2016, 18, 307. [Google Scholar] [CrossRef]
- Yin, Y.; Shang, P. Weighted multiscale permutation entropy of financial time series. Nonlinear Dyn. 2014, 78, 2921–2939. [Google Scholar] [CrossRef]
- Zheng, J.; Tu, D.; Pan, H.; Hu, X.; Liu, T.; Liu, Q. A Refined Composite Multivariate Multiscale Fuzzy Entropy and Laplacian Score-Based Fault Diagnosis Method for Rolling Bearings. Entropy 2017, 19, 585. [Google Scholar] [CrossRef]
- Saxena, A.; Shekhawat, S. Ambient Air Quality Classification by Grey Wolf Optimizer Based Support Vector Machine. J. Environ. Public Health 2017, 2017, 12. [Google Scholar] [CrossRef] [PubMed]
- Zunino, L.; Olivares, F.; Scholkmann, F.; Rosso, O.A. Permutation entropy based time series analysis: Equalities in the input signal can lead to false conclusions. Phys. Lett. A 2017, 381, 1883–1892. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Pan, H.; Yang, S.; Cheng, J. Generalized composite multiscale permutation entropy and Laplacian score based rolling bearing fault diagnosis. Mech. Syst. Sig. Process. 2018, 99, 229–243. [Google Scholar] [CrossRef]
- Bruzzone, L.; Chi, M.; Marconcini, M. A Novel Transductive SVM for Semisupervised Classification of Remote-Sensing Images. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3363–3373. [Google Scholar] [CrossRef] [Green Version]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Software 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Bearing Data Center Website, Case Western Reserve University [DB/OL][2017-6-20]. Available online: http://www.eecs.cwru.edu/laboratory/bearing (accessed on 20 June 2016).
- Jiang, X.; Wu, N.; Shi, J.J.; Shen, C.; L, C.; Zhu, Z. Instantaneous Frequency Estimation Based on Ridge Information Enhancement and Feature Fusion. J. Vib. Shock 2018, 37, 171–177. [Google Scholar]
- Qi, Y.; Shen, C.; Wang, D.; Shi, J.; Jiang, X.; Zhu, Z. Stacked Sparse Autoencoder-Based Deep Network for Fault Diagnosis of Rotating Machinery. IEEE Access 2017, 5, 15066–15079. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Fault Location | Fault Diameter (mm) |
|---|---|---|
| BE1 | Ball element | 0.1778 |
| BE2 | Ball element | 0.5334 |
| IR1 | Inner race | 0.1778 |
| IR2 | Inner race | 0.5334 |
| OR1 | Outer race | 0.1778 |
| OR2 | Outer race | 0.5334 |
| Norm | Normal bearing | 0 |
| Number of Used Features | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Best c | 2.7 | 19.3 | 81.1 | 12.7 | 4.9 | 14.5 | 90.4 | 34.5 | 3.6 | 52.8 |
| Best g | 67.8 | 14.1 | 35.4 | 26.7 | 33.7 | 5.4 | 46.8 | 92.7 | 33.7 | 16.9 |
| Number of used features | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| Best c | 58.4 | 48.3 | 91.5 | 6.2 | 83.5 | 48.2 | 68.2 | 91.9 | 22.1 | 5.1 |
| Best g | 1.1 | 20.0 | 0.6 | 8.1 | 19.9 | 15.2 | 17.6 | 0 | 24.5 | 0 |
| Number of Used Features | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Best c | 72.6 | 64.1 | 70.6 | 1.0 | 55.3 | 48.7 | 7.9 | 66.6 | 43.4 | 49.0 |
| Best g | 100 | 15.9 | 14.0 | 57.6 | 46.6 | 77.0 | 64.8 | 10.4 | 20.5 | 2.9 |
| Number of used features | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| Best c | 34.1 | 58.1 | 63.6 | 97.2 | 40.0 | 52.8 | 93.7 | 14.0 | 79.9 | 61.5 |
| Best g | 2.8 | 36.8 | 13.5 | 7.0 | 10.2 | 16.9 | 17.6 | 5.5 | 6.9 | 1.3 |
| Number of Used Features | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Best c | 36.4 | 78.2 | 29.6 | 94.4 | 3.8 | 34.1 | 84.5 | 3.1 | 62.4 | 37.9 |
| Best g | 97.1 | 38.7 | 70.0 | 55.2 | 14.9 | 9.1 | 13.9 | 8.2 | 0.0 | 16.3 |
| Number of used features | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| Best c | 17.9 | 31.6 | 72.2 | 0.0 | 55.8 | 89.0 | 73.4 | 14.6 | 92.4 | 2.3 |
| Best g | 11.4 | 8.9 | 13.5 | 0.0 | 0.0 | 0.0 | 0.3 | 0.2 | 6.7 | 0.0 |
| Abbreviation | Fault Location | Fault Diameter (mm) |
|---|---|---|
| BE1 | Ball element | 0.6 |
| IR1 | Inner race | 0.2 |
| IR2 | Inner race | 0.6 |
| OR1 | Outer race | 0.2 |
| OR2 | Outer race | 0.6 |
| Norm | Normal bearing | 0 |
| Number of Used Features | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Best c | 42.9 | 97.3 | 19.1 | 29.8 | 53.6 | 86.7 | 39.3 | 41.1 | 67.0 | 15.8 |
| Best g | 54.1 | 96.8 | 87.3 | 26.5 | 62.9 | 34.9 | 3.3 | 60.7 | 3.1 | 33.7 |
| Number of used features | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| Best c | 17.3 | 45.3 | 24.9 | 45.2 | 98.5 | 58.2 | 29.7 | 40.1 | 33.7 | 97.8 |
| Best g | 82.6 | 51.5 | 32.5 | 2.6 | 59.8 | 64.4 | 85.5 | 38.6 | 33.6 | 21.2 |
| Number of Used Features | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Best c | 78.4 | 16.8 | 100 | 15.3 | 15 | 68.6 | 36.7 | 96.2 | 68.1 | 89.1 |
| Best g | 31.2 | 13.7 | 23.8 | 29.4 | 38.4 | 0.0 | 30.8 | 0.9 | 89.6 | 88.5 |
| Number of used features | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| Best c | 69.8 | 98.4 | 68.4 | 31.4 | 24.6 | 58.7 | 91.5 | 90.9 | 15.7 | 37.9 |
| Best g | 61.6 | 26.8 | 83.8 | 83.0 | 33.1 | 42.1 | 85.5 | 36.3 | 75.1 | 89.3 |
| Number of Used Features | 1 | 22 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Best c | 29.8 | 18.3 | 4.6 | 63.8 | 48.9 | 0.3 | 0.0 | 48.6 | 43.3 | 57.4 |
| Best g | 95.0 | 40.0 | 3.1 | 6.1 | 18.4 | 2.5 | 4.8 | 9.0 | 1.7 | 19.5 |
| Number of used features | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| Best c | 58.4 | 13.6 | 100.0 | 25.7 | 17.4 | 70.0 | 60.0 | 77.4 | 79.1 | 55.1 |
| Best g | 0.0 | 4.2 | 7.7 | 1.7 | 0.0 | 4.7 | 3.6 | 9.9 | 2.1 | 3.7 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Z.; Zheng, J.; Huang, S.; Pan, H.; Liu, Q. Time-Shift Multi-scale Weighted Permutation Entropy and GWO-SVM Based Fault Diagnosis Approach for Rolling Bearing. Entropy 2019, 21, 621. https://doi.org/10.3390/e21060621
Dong Z, Zheng J, Huang S, Pan H, Liu Q. Time-Shift Multi-scale Weighted Permutation Entropy and GWO-SVM Based Fault Diagnosis Approach for Rolling Bearing. Entropy. 2019; 21(6):621. https://doi.org/10.3390/e21060621
Chicago/Turabian StyleDong, Zhilin, Jinde Zheng, Siqi Huang, Haiyang Pan, and Qingyun Liu. 2019. "Time-Shift Multi-scale Weighted Permutation Entropy and GWO-SVM Based Fault Diagnosis Approach for Rolling Bearing" Entropy 21, no. 6: 621. https://doi.org/10.3390/e21060621