
Numerical Modeling and Application of Horizontal-Axis Wind Turbine Arrays in Large Wind Farms


Abstract
:1. Introduction
- Conducting theoretical research on various numerical simulation wind-turbine models, seeking feasible (with acceptable computational costs) wind-turbine models for large-scale wind-farm calculations, and selecting the BEM-CFD coupling method on the basis of balancing practicality, accuracy, and cost;
- Customizing the solver in open-source OpenFOAM, applying the BEM-CFD coupling method to wind-farm calculations, studying the impact of different array wind-turbine arrays on wind farms and the interaction between wind-turbine arrays, and drawing some very practical conclusions.
2. Research Method
2.1. Description of Experimental HAWT
2.2. Governing Equation of Flow Field
2.3. HAWT Modeling
2.3.1. One-Dimensional Momentum Theory
2.3.2. Classic BEM Method
- Initialize and , usually = = 0;
- Calculate flow angle according to Figure 5b;
- Calculate the local angle of attack according to Figure 5b;
- Find and read and from the given table;
- Calculation = = and = = ;
- Calculate = and = , where, solidity is defined as proportion of annular area covered by blades in the control volume, i.e., = , wherein the number of blades, the local chord length, and the radial position of the control volume;
- If and have changed by more than a certain margin of error, proceed to step 2 or complete;
- Calculate the local load of blade segments.
- Ludwig Prandtl’s tip loss factor. It corrects the assumption that the number of blades is infinite. The derivation of it is very complicated, but a complete description can be found in [21]. Therefore, when the corrected load is uniformly distributed along the azimuth and used for the momentum equation, their blade induction results are very similar to the case of a finite number of blades by using = and = , where is correction factor for aerodynamic loads;
- Glauert correction. It is an empirical relationship between thrust coefficient and axial induction factor , when > 0.2~0.4, simple momentum theory fails, and the relationship derived by one-dimensional momentum theory no longer holds.
2.3.3. BEM-CFD Coupling Method
2.3.4. Jensen Wake Model
2.4. Numerical Experiments Setting
2.4.1. Calculating Domain
2.4.2. Meshing
2.4.3. Initial and Boundary Conditions
2.4.4. Schemes and Algorithms
3. Results and Discussion
3.1. Single HAWT
3.1.1. Thrust Coefficient and Calculation Cost
- Under the same HAWT geometry, the thrust coefficients calculated by the uniformly loaded BEM-CFD method with case (4) are larger than those calculated by the DM method with case (2), due to the underestimation of wake defects and turbulence intensity when using the BEM-CFD method;
- The DM method with case (2) needs more time-cost in order to converge to a sufficient accuracy value (based on the clock time taken by the computer to calculate until t = 0.66 s as the standard). Cost of DM method is about 5042 or 90 times that of the uniformly-with-case (4) or non-uniformly-with-case (5) loaded BEM-CFD method;
- Using the results of the DM method with case (2) as a reference value, the relative errors of the thrust coefficients of the uniformly loaded BEM-CFD method with case (4) and the non-uniformly loaded BEM-CFD method with case (5) are 1.8% and 2.1%, respectively. (Here, non-uniform loading has a certain degree of arbitrariness, so the error is slightly larger. It is possible to achieve better or worse results by assuming different thrust-distribution functions);
- In the DM method, the thrust coefficient of case (2) with NACA63-412 is greater than that of case (3) with NACA63-210 when the rotor blades of the HAWT adopt different airfoil sections and other settings are the same, which is because the lift coefficient of airfoil NACA63-412 is greater than that of airfoil NACA63-210;
- The thrust coefficient of a single nacelle in case (1) is approximately 0.6% of the nacelle and blades combination in case (2), and its impact can be almost ignored.
3.1.2. Calculated and Measured Power
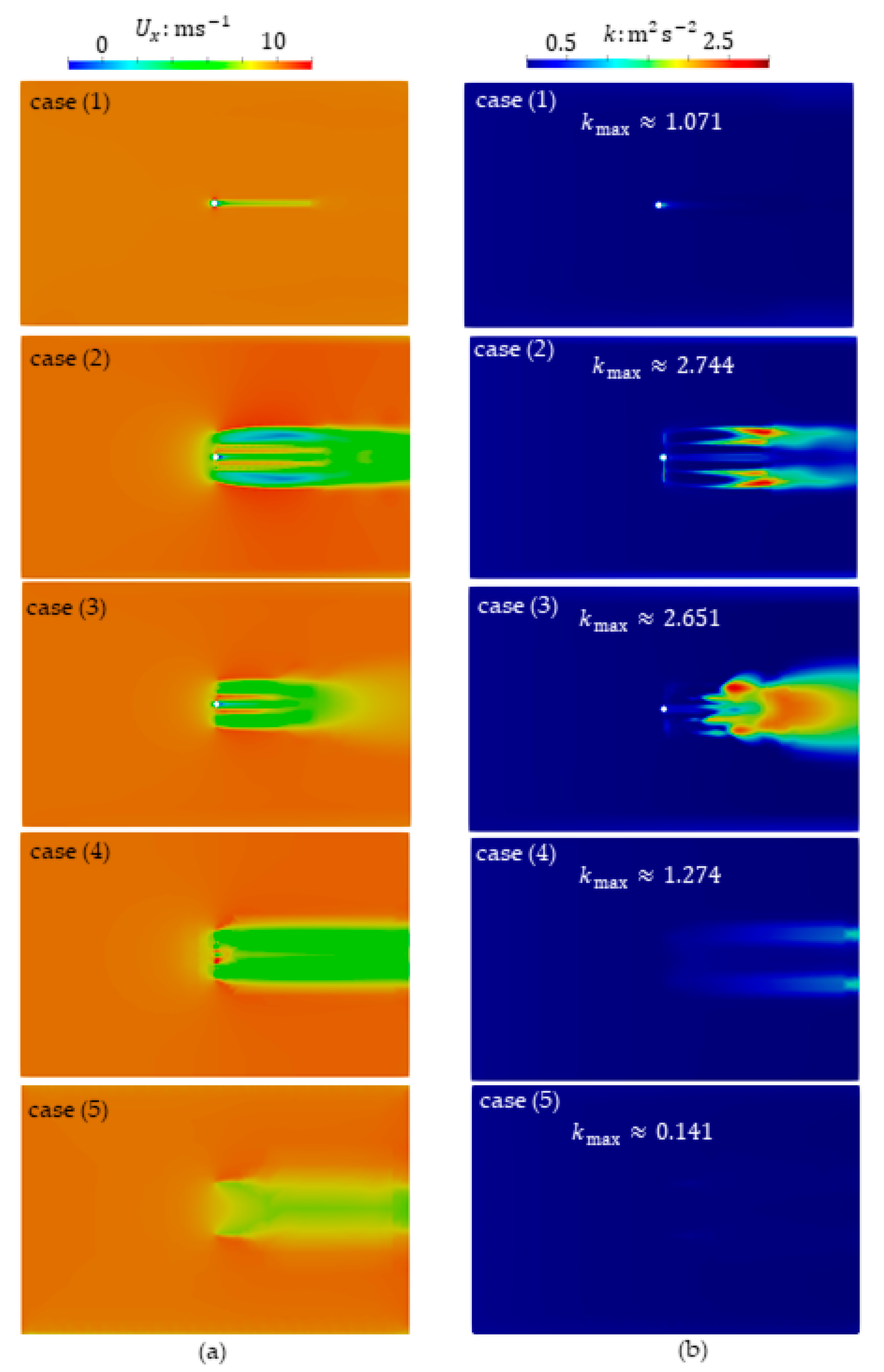
3.1.3. Axial-Velocity and Turbulent-Kinetic-Energy Field
3.1.4. Flow Fields at Different TSRs
3.2. Two and Three HAWTs
3.2.1. Two HAWTs at Front and Rear
3.2.2. Two HAWTs at Left and Right
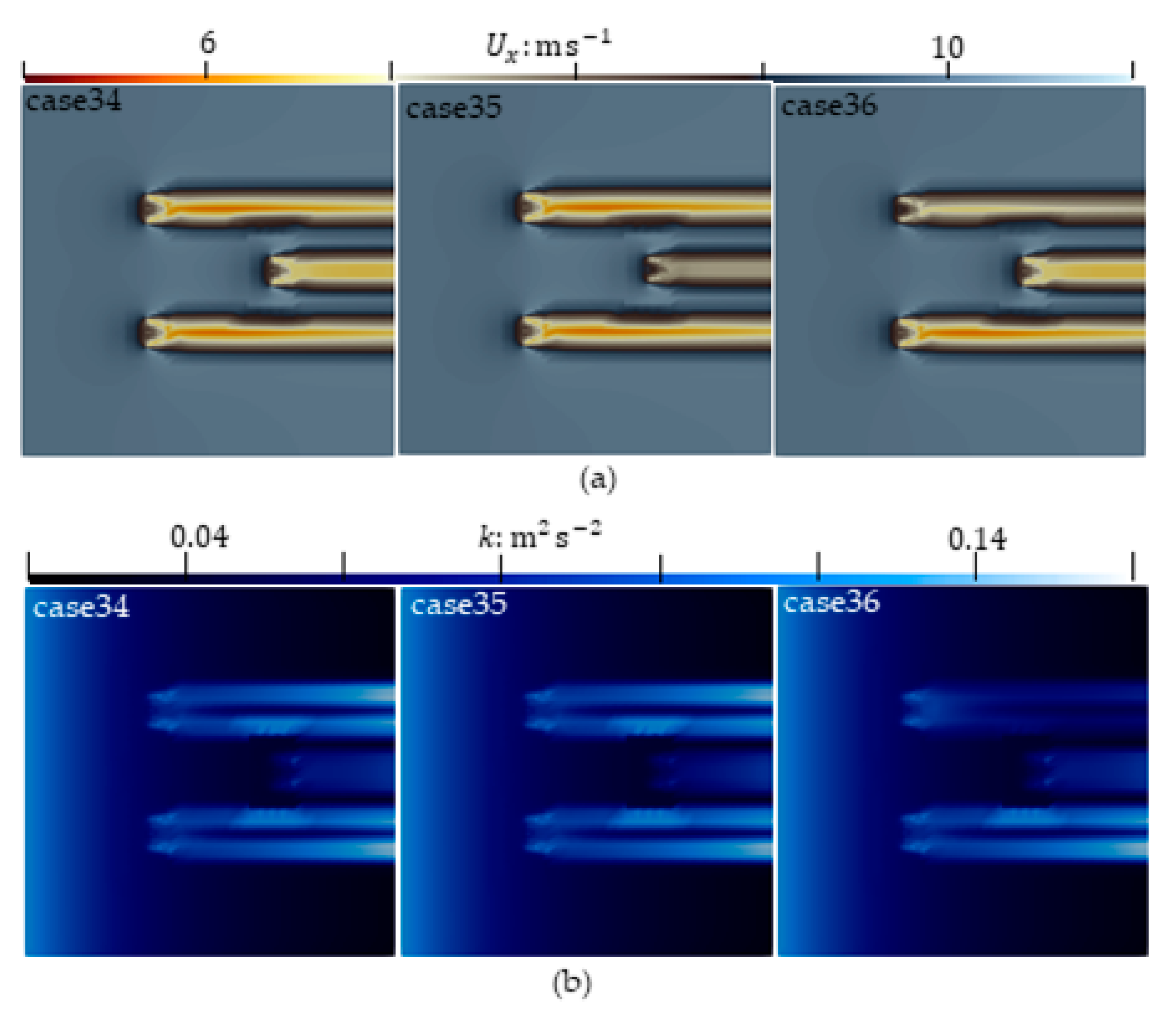
3.2.3. Three Staggered HAWTs
3.3. HAWTs Arrays
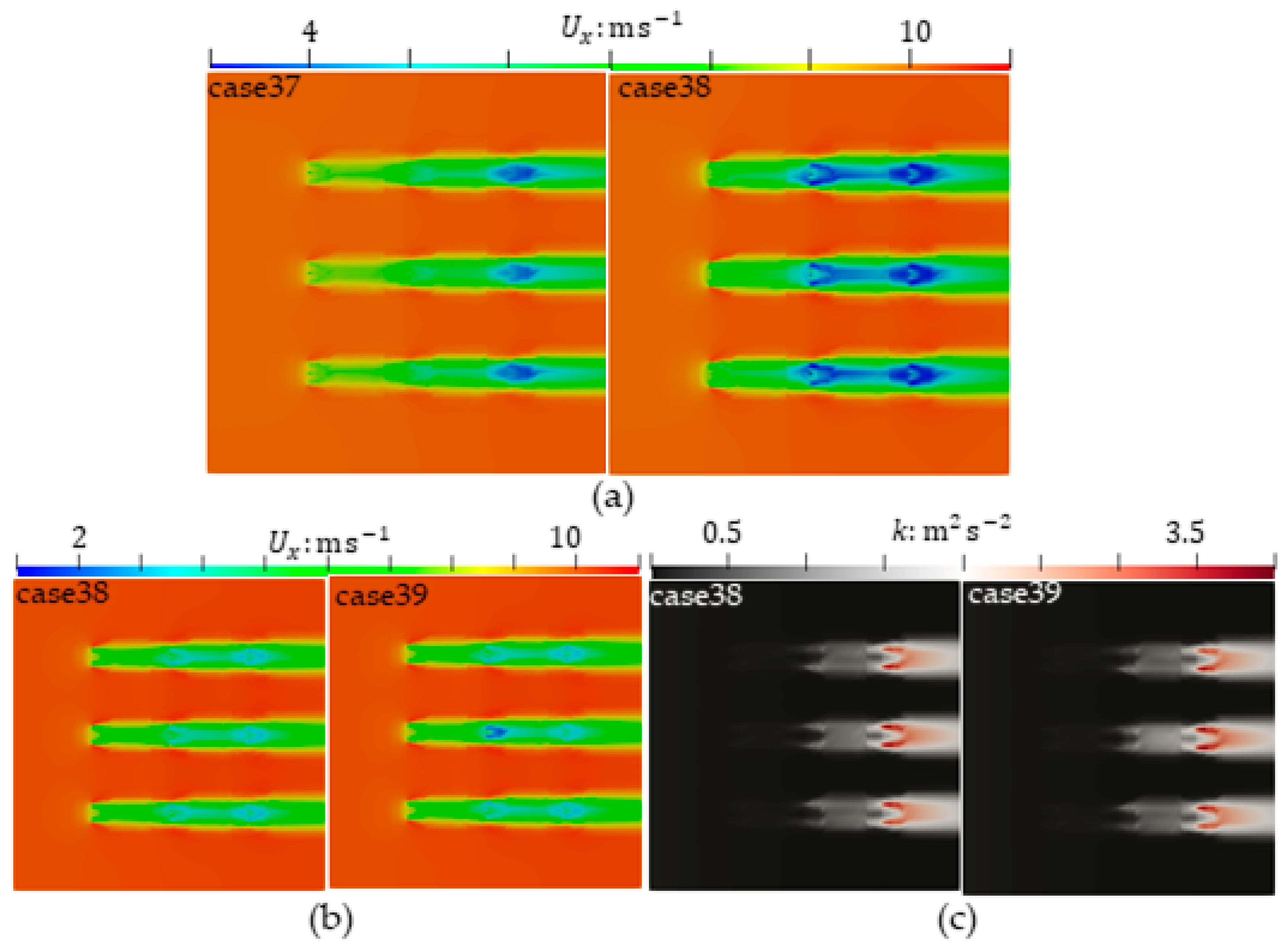
3.3.1. A Three-Rows and Three-Columns HAWTs Array
3.3.2. A One-Row and Three-Columns HAWTs Array with ABL
3.4. Sensitivity Analysis
4. Conclusions
- The BEM-CFD method greatly improves the calculation speed within an accuracy range of thrust coefficients less than 2.5%, making it very suitable for the calculation of large wind farm HAWT arrays; By using the results of uniform loading in the BEM-CFD method, the HAWT can be subjected to any desired non-uniform loading, which is very meaningful for optimizing the design of the HAWT.
- For regular HAWT arrays, it is reasonable to choose a spacing in the wind direction and a spacing in the crosswind direction for simplicity in practice. In order to improve the total power acquisition of a large wind farm HAWT array, we can adopt irregular HAWT array arrangements. Among them, this irregularity includes: the rotation direction of the HAWT arrays can be inconsistent, the size of the HAWTs and the cross-sectional airfoil of the HAWT blades cannot be the same, and so on. Further research is needed on which of these irregularly arranged HAWT arrays or regular HAWT arrays with real-time control systems has the lower cost.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| HAWT | horizontal-axis wind-turbine |
| AM | analytical method |
| VM | vortex-lattice or particle method |
| PM | panel method |
| BEM | blade element momentum method |
| GAM | generalized actuator method |
| DM | direct modeling method |
| CFD | computational fluid dynamics |
| TSR | tip-speed ratio |
| ABL | atmospheric boundary layer |
| Re | Reynolds number |
| DNS | direct numerical simulation |
| AD | actuator disk method |
| AS | actuator surface method |
| AL | actuator line method |
| RANS | Reynolds average Navier–Stokes equation |
| LES | large eddy simulation |
| PD | permeable disk |
| Ma | Mach number |
| BCs | boundary conditions |
| ICs | initial conditions |
| PISO | algorithm of pressure-implicit splitting-operators |
| GAAM | geometric aggregated algebraic multi grid method |
| SIMPLE | semi-implicit method for pressure linked equations |
References
- Gyimah, R.R. The hot zones are cities: Methodological outcomes and synthesis of surface urban heat island effect in Africa. Cogent Soc. Sci. 2023, 9, 2165651. [Google Scholar] [CrossRef]
- Huang, C.H.; Tsai, H.H.; Chen, C.H. Observation of the vertical structure of atmospheric boundary layer in subtropical UHI by radiosonde. Geocarto Int. 2023, 38, 2208553. [Google Scholar] [CrossRef]
- Global Wind Report 2021. Available online: https://gwec.net/GWEC (accessed on 1 September 2022).
- Mao, X.; Sørensen, J.N. Far-wake meandering induced by atmospheric eddies in flow past a wind turbine. J. Fluid Mech. 2018, 846, 190–209. [Google Scholar] [CrossRef]
- Tummala, A.; Velamati, R.K.; Sinha, D.K.; Indraja, V.; Krishna, V.H. A review on small scale wind turbines. Renew. Sustain. Energy Rev. 2016, 56, 1351–1371. [Google Scholar] [CrossRef]
- Wang, C.; Prinn, R.G. Potential climatic impacts and reliability of very large-scale wind farms. Atmos. Chem. Phys. 2010, 10, 2053–2061. [Google Scholar] [CrossRef]
- Fiedler, B.H.; Bukovsky, M.S. The effect of a giant wind farm on precipitation in a regional climate model. Environ. Res. Lett. 2011, 6, 045101. [Google Scholar] [CrossRef]
- Ruan, Z.; Lu, X.; Wang, S.; Xing, J.; Wang, W.; Chen, D.; Nielsen, C.P.; Luo, Y.; He, K.; Hao, J. Impacts of large-scale deployment of mountainous wind farms on wintertime regional air quality in the Beijing-Tian-Hebei area. Atmos. Environ. 2022, 278, 119074. [Google Scholar] [CrossRef]
- Fröhlich, J.; Kuerten, H.; Geurts, B.J.; Armenio, V. Direct and Large-Eddy Simulation IX; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar] [CrossRef]
- Dasari, T.; Wu, Y.; Liu, Y.; Hong, J. Near-wake behaviour of a utility-scale wind turbine. J. Fluid Mech. 2019, 859, 204–246. [Google Scholar] [CrossRef]
- Hansen, M.O.L.; Sorensen, J.N.; Voutsinas, S.; Sørensen, N.; Madsen, H.A. State of the art in wind turbine aerodynamics and aeroelasticity. Prog. Aerosp. Sci. 2006, 42, 285–330. [Google Scholar] [CrossRef]
- Joshi, H.; Thomas, P. Review of vortex lattice method for supersonic aircraft design. Aeronaut. J. 2023, 25, 1–35. [Google Scholar] [CrossRef]
- Chen, C.W.; Peng, N. Prediction and analysis of 3D hydrofoil and propeller under potential flow using panel method. MATEC Web Conf. 2016, 77, 01013. [Google Scholar] [CrossRef]
- Amoretti, T.; Huet, F.; Garambois, P.; Roucoules, L. Configurable dual rotor wind turbine model based on BEM method: Co-rotating and counter-rotating comparison. Energy Convers. Manag. 2023, 293, 117464. [Google Scholar] [CrossRef]
- Fan, S.L.; Liu, Z.Q. Proposal of fully-coupled actuated disk model for wind turbine operation modeling in turbulent flow field due to complex topography. Energy 2023, 284, 128509. [Google Scholar] [CrossRef]
- Kim, T.; Oh, S.; Yee, K. Improved actuator surface method for wind turbine application. Renew. Energy 2015, 76, 16–26. [Google Scholar] [CrossRef]
- Yu, Z.Y.; Zheng, X.; Ma, Q.W. Study on actuator line modeling of two NREL 5-MW wind turbine wakes. Appl. Sci. 2018, 8, 434. [Google Scholar] [CrossRef]
- Kleine, V.G.; Hanifi, A.; Henningson, D.S. Non-iterative vortex-based smearing correction for the actuator line method. J. Fluid Mech. 2023, 961, A29. [Google Scholar] [CrossRef]
- Min, B. Introduction to Nordbank NTK 300kW Wind Turbine Generator. Available online: http://www.cqvip.com (accessed on 1 September 2022).
- Moukalled, F.; Mangani, L.; Darwish, M. The Finite Volume Method in Computational Fluid Dynamics; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Hansen, M.O.L. Aerodynamics of Wind Turbines; Library of Congress Cataloging-in-Publication Data: Washington, DC, USA, 2015. [Google Scholar]
- Ferrer, E.; Montlaur, A. CFD for wind and tidal offshore turbines. In Springer Tracts in Mechanical Engineering; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar] [CrossRef]
- Glauert, H. Aerodynamic Theory: Airplane Propellers; Springer: New York, NY, USA, 1935; Volume 4, pp. 169–360. [Google Scholar]
- Burton, T.; Jenkins, N.; Sharpe, D.; Bossanyi, E. Wind Energy Handbook; John Wiley and Sons, Ltd.: Chichester, UK, 2011. [Google Scholar]
- Peña, A.; Mirocha, J.D.; Laan, M.P.V.D. Evaluation of the fitch wind-farm wake parameterization with large-eddy simulations of wakes using the weather research and forecasting model. Am. Meteorol. Soc. 2022, 150, 3051–3064. [Google Scholar] [CrossRef]
- Calaf, M.; Meneveau, C.; Meyers, J. Large eddy simulation study of fully developed wind-turbine array boundary layers. Phys. Fluids 2010, 22, 015110. [Google Scholar] [CrossRef]
- Shen, W.Z.; Sorensen, J.N.; Mikkelsen, R. Tip loss correction for actuator/Navier-Stokes computations. J. Sol. Energy Eng. 2005, 127, 209–213. [Google Scholar] [CrossRef]
- Ma, Y.; Archer, C.L.; Vasel-Be-Hagh, A. The Jensen wind farm parameterization. Wind Energy Sci. 2022, 7, 2407–2431. [Google Scholar] [CrossRef]
- Hargreaves, D.M.; Wright, N.G. On the use of the k-epsilon model in commercial CFD software to model the neutral atmospheric boundary layer. J. Wind Eng. Ind. Aerodyn. 2007, 95, 355–369. [Google Scholar] [CrossRef]
- Deremble, B.; Wienders, N.; Dewar, W.K. CheapAML: A simple, atmospheric boundary layer model for use in ocean-only model calculations. Am. Meteorol. Soc. 2013, 141, 809–821. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of HAWTs | Cases | Domain |
|---|---|---|
| single | case (1–14) | cylinder |
| two at front and rear | case (15–24) | cylinder |
| two at left and right | case (25–31) | block |
| three staggered | case (32–36) | block |
| 3-rows and 3-columns | case (37–39) | block |
| 1-row and 3-columns 1 | case (40) | block |
| BCs | : m/s | : m2 · s−2 | : m2 · s−2 | : m2 · s−3 | : s−1 | : m2 · s−1 |
|---|---|---|---|---|---|---|
| Inlet | fixed value | zero gradient | fixed value | fixed value | fixed value | calculated |
| Outlet | inlet outlet | fixed value | inlet outlet | inlet outlet | inlet outlet | calculated |
| Walls | no slip | zero gradient | wall function | wall function | - | wall function |
| Others | slip | slip | slip | - | slip | slip |
| Case | Relative Error | Cost | Method | |
|---|---|---|---|---|
| (1) | 0.005 | - | - | DM |
| (2) 1 | 0.823 | Reference | value | DM |
| (3) 2 | 0.767 | - | - | DM |
| (4) 1 | 0.836 | 1.8% | 5042 | BEM-CFD |
| (5) 1 | 0.840 | 2.1% | 90 | BEM-CFD |
| Case | Rotor1-Front | Rotor2-Rear | Rotor2/Rotor1 | |
|---|---|---|---|---|
| (15) | 0.443 | 0.266 | 60.1% | |
| (16) | 0.447 | 0.300 | 67.2% | |
| (17) | 0.449 | 0.315 | 70.1% | |
| (18) | 0.452 | 0.379 | 83.9% | |
| (19) | 0.447 | 0.389 | 86.9% | |
| (20) | 0.445 | 0.393 | 88.4% |
| Case | d2 | Rotor1-Right | Rotor2-Left | Rotor2 + Rotor1 |
|---|---|---|---|---|
| (25) | 0.411 | 0.393 | 0.804 | |
| (26) | 0.354 | 0.365 | 0.719 | |
| (27) | 0.422 | 0.428 | 0.850 |
| Case | Rotor1-Right | Rotor2-Left | Rotor3-Rear | Rotor (1 + 2 + 3) | ||
|---|---|---|---|---|---|---|
| (32) | 0.420 | 0.428 | 0.424 | 1.272 | ||
| (33) | 0.394 | 0.382 | 0.311 | 1.087 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Young, L.; Zheng, X.; Gao, E. Numerical Modeling and Application of Horizontal-Axis Wind Turbine Arrays in Large Wind Farms. Wind 2023, 3, 459-484. https://doi.org/10.3390/wind3040026
Young L, Zheng X, Gao E. Numerical Modeling and Application of Horizontal-Axis Wind Turbine Arrays in Large Wind Farms. Wind. 2023; 3(4):459-484. https://doi.org/10.3390/wind3040026
Chicago/Turabian StyleYoung, Lien, Xing Zheng, and Erjie Gao. 2023. "Numerical Modeling and Application of Horizontal-Axis Wind Turbine Arrays in Large Wind Farms" Wind 3, no. 4: 459-484. https://doi.org/10.3390/wind3040026