
Experimental Design for Virtual Experiments in Tilted-Wave Interferometry

 , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Tilted-Wave Interferometer
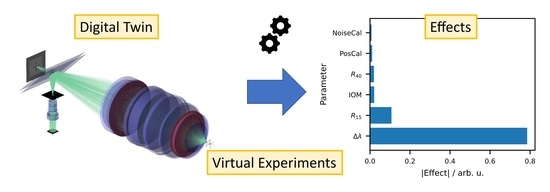
2.2. Digital Twin
2.3. Simulated Series of Experiments
2.4. Virtual Sample Designs
2.5. Design of Experiment
3. Results
3.1. Physical Modifications to the TWI Geometry
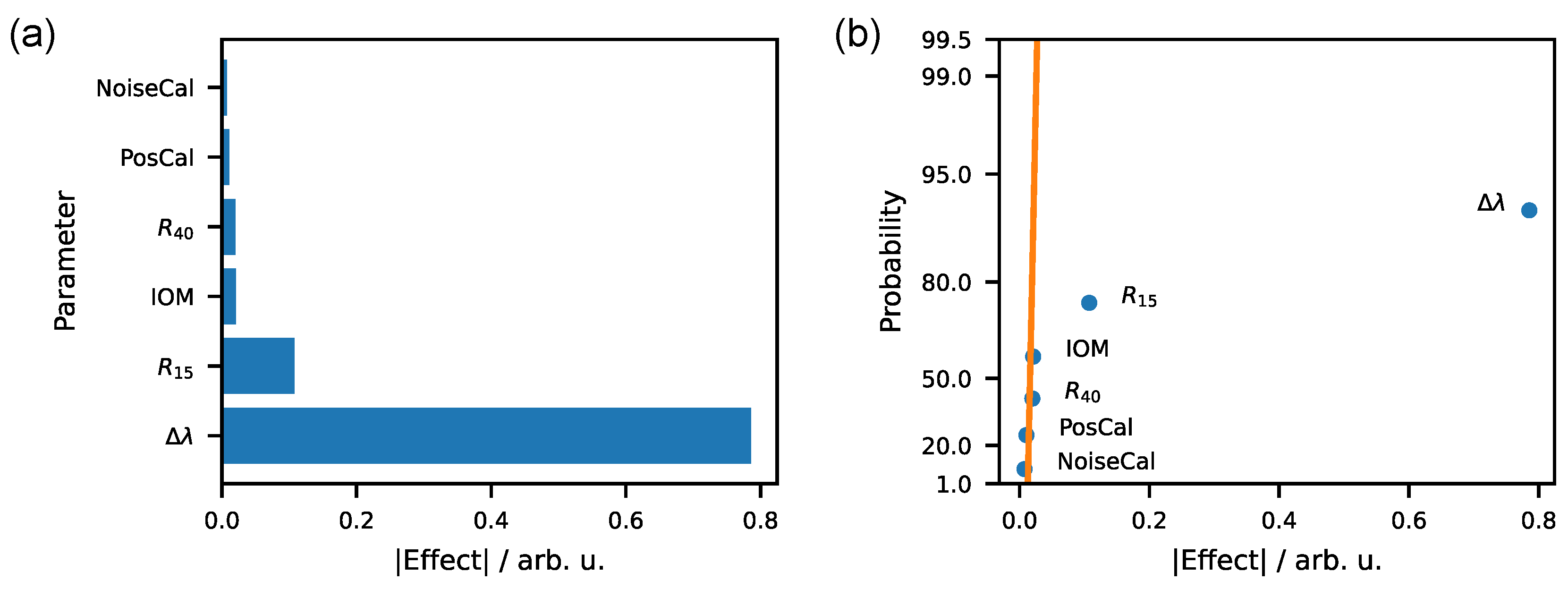
3.2. Identification of Relevant Calibration Parameters
3.3. Sweep over Individual Parameters
3.4. Identification of Relevant Measurement Parameters
3.5. Full Factorial Analysis of Relevant Measurement Parameters
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BFS | Best-fit sphere |
| MLA | Microlens array |
| RMS | Root mean square |
| SUT | Specimen-under-test |
| TWI | Tilted-wave interferometer/interferometry |
References
- Schulz, G. IV Aspheric Surfaces. In Progress in Optics; Wolf, E., Ed.; Elsevier: Amsterdam, The Netherlands, 1988; pp. 349–415. [Google Scholar] [CrossRef]
- Hentschel, R.; Braunecker, B.; Tiziani, H.J. (Eds.) Advanced Optics Using Aspherical Elements; SPIE: Bellingham, WA, USA, 2008. [Google Scholar] [CrossRef] [Green Version]
- Gutiérrez, C.E. Aspherical lens design. J. Opt. Soc. Am. A 2013, 30, 1719. [Google Scholar] [CrossRef]
- Weckenmann, A.; Estler, T.; Peggs, G.; McMurtry, D. Probing Systems in Dimensional Metrology. CIRP Ann. 2004, 53, 657–684. [Google Scholar] [CrossRef]
- Van Gestel, N.; Cuypers, S.; Bleys, P.; Kruth, J.P. A performance evaluation test for laser line scanners on CMMs. Opt. Lasers Eng. 2009, 47, 336–342. [Google Scholar] [CrossRef] [Green Version]
- Forman, P.F. The Zygo Interferometer System. In Proceedings of the 23rd Annual Technical Symposium, San Diego, CA, USA, WA, USA, 25 December 1979; Hopkins, G.W., Ed.; SPIE: Bellingham, WA, USA, 1979; pp. 41–49. [Google Scholar] [CrossRef]
- Poleshchuk, A.G.; Korolkov, V.P.; Nasyrov, R.K.; Asfour, J.M. Computer generated holograms: Fabrication and application for precision optical testing. In Proceedings of the Optical Systems Design, Glasgow, Scotland, UK, 25 September 2008; Duparré, A., Geyl, R., Eds.; SPIE: Bellingham, WA, USA, 2008; p. 710206. [Google Scholar] [CrossRef]
- Knauer, M.C.; Kaminski, J.; Hausler, G. Phase measuring deflectometry: A new approach to measure specular free-form surfaces. In Proceedings of the Photonics Europe, Strasbourg, France, 10 September 2004; Osten, W., Takeda, M., Eds.; SPIE: Bellingham, WA, USA, 2004; p. 366. [Google Scholar] [CrossRef]
- Petz, M.; Tutsch, R. Reflection grating photogrammetry: A technique for absolute shape measurement of specular free-form surfaces. In Proceedings of the Optics and Photonics 2005, San Diego, CA, USA, 18 August 2005; Stahl, H.P., Ed.; SPIE: Bellingham, WA, USA, 2005; p. 58691. [Google Scholar] [CrossRef]
- Kulawiec, A.; Murphy, P.; DeMarco, M. Measurement of high-departure aspheres using subaperture stitching with the Variable Optical Null (VON). In Proceedings of the 5th International Symposium on Advanced Optical Manufacturing and Testing Technologies: Advanced Optical Manufacturing Technologies, Dalian, China, 26–29 April 2010; Yang, L., Namba, Y., Walker, D.D., Li, S., Eds.; SPIE: Bellingham, WA, USA, 2010; p. 765512. [Google Scholar] [CrossRef]
- Küchel, M.F. Interferometric measurement of rotationally symmetric aspheric surfaces. Opt. Meas. Syst. Ind. Insp. VI 2009, 7389, 738916. [Google Scholar] [CrossRef]
- Greivenkamp, J.E.; Gappinger, R.O. Design of a nonnull interferometer for aspheric wave fronts. Appl. Opt. 2004, 43, 5143. [Google Scholar] [CrossRef] [PubMed]
- Garbusi, E.; Pruss, C.; Osten, W. Interferometer for precise and flexible asphere testing. Opt. Lett. 2008, 33, 2973. [Google Scholar] [CrossRef] [PubMed]
- Baer, G.; Schindler, J.; Pruss, C.; Siepmann, J.; Osten, W. Calibration of a non-null test interferometer for the measurement of aspheres and free-form surfaces. Opt. Express 2014, 22, 31200. [Google Scholar] [CrossRef]
- Pruss, C.; Baer, G.B.; Schindler, J.; Osten, W. Measuring aspheres quickly: Tilted wave interferometry. Opt. Eng. 2017, 56, 111713. [Google Scholar] [CrossRef] [Green Version]
- Schindler, J.; Pruss, C.; Osten, W. Simultaneous removal of nonrotationally symmetric errors in tilted wave interferometry. Opt. Eng. 2019, 58, 1. [Google Scholar] [CrossRef]
- Harsch, A.; Pruss, C.; Baer, G.; Osten, W. Monte Carlo simulations: A tool to assess complex measurement systems. In Proceedings of the Sixth European Seminar on Precision Optics Manufacturing, Teisnach, Germany, 9–10 April 2019; Schopf, C., Rascher, R., Eds.; SPIE: Bellingham, WA, USA, 2019; p. 24. [Google Scholar] [CrossRef]
- Fortmeier, I.; Stavridis, M.; Elster, C.; Schulz, M. Steps towards traceability for an asphere interferometer. In Proceedings of the SPIE Optical Metrology, Munich, Germany, 26 June 2017; Lehmann, P., Osten, W., Albertazzi Gonçalves, A., Eds.; SPIE: Bellingham, WA, USA, 2017; p. 1032939. [Google Scholar] [CrossRef]
- Schachtschneider, R.; Stavridis, M.; Fortmeier, I.; Schulz, M.; Elster, C. SimOptDevice: A library for virtual optical experiments. J. Sensors Sens. Syst. 2019, 8, 105–110. [Google Scholar] [CrossRef] [Green Version]
- Fortmeier, I.; Stavridis, M.; Schulz, M.; Elster, C. Development of a metrological reference system for the form measurement of aspheres and freeform surfaces based on a tilted-wave interferometer. Meas. Sci. Technol. 2022, 33, 045013. [Google Scholar] [CrossRef]
- Box, G.E.P.; Hunter, S.; Hunter, W.G. Statistics for Experimenters: Design, Innovation, and Discovery, 2nd ed.; Wiley-Interscience: Hoboken, NJ, USA, 2005; p. 672. [Google Scholar]
- Winer, B.J.; Brown, D.R.; Michels, K.M. Statistical Principles in Experimental Design, 3rd ed.; Mcgraw-Hill Higher Education: New York, NY, USA, 1991; p. 1057. [Google Scholar]
- Pukelsheim, F. Optimal Design of Experiments; John Wiley & Sons Inc.: Hoboken, NJ, USA, 1993; p. 384. [Google Scholar]
- Mahr GmbH. Mahr TWI 60. Available online: https://metrology.mahr.com/de/produkte/artikel/9061111-tilted-wave-interferometer-maropto-twi-60 (accessed on 13 January 2022).
- Schindler, J.; Baer, G.; Pruss, C.; Osten, W. The tilted-wave-interferometer: Freeform surface reconstruction in a non-null setup. In Proceedings of the International Symposium on Optoelectronic Technology and Application 2014, Beijing, China, 3 December 2014; Czarske, J., Zhang, S., Sampson, D., Wang, W., Liao, Y., Eds.; SPIE: Bellingham, WA, USA, 2014; p. 92971. [Google Scholar] [CrossRef]
- Fortmeier, I.; Stavridis, M.; Wiegmann, A.; Schulz, M.; Osten, W.; Elster, C. Evaluation of absolute form measurements using a tilted-wave interferometer. Opt. Express 2016, 24, 3393. [Google Scholar] [CrossRef] [PubMed]
- Czitrom, V. One-Factor-at-a-Time versus Designed Experiments. Am. Stat. 1999, 53, 126–131. [Google Scholar] [CrossRef]
- Plackett, R.L.; Burman, J.P. The Design of Optimum Multifactorial Experiments. Biometrika 1946, 33, 305. [Google Scholar] [CrossRef]
- Elster, C.; Neumaier, A. Screening by Conference Designs. Biometrika 1995, 82, 589. [Google Scholar] [CrossRef]
- Heckert, N.; Filliben, J.; Croarkin, C.; Hembree, B.; Guthrie, W.; Tobias, P.; Prinz, J. Handbook 151: NIST/SEMATECH e-Handbook of Statistical Methods; NIST Interagency/Internal Report (NISTIR); National Institute of Standards and Technology: Gaithersburg, MD, USA, 2012. [Google Scholar] [CrossRef]
- Schachtschneider, R.; Fortmeier, I.; Stavridis, M.; Asfour, J.; Berger, G.; Bergmann, R.B.; Beutler, A.; Blümel, T.; Klawitter, H.; Kubo, K.; et al. Interlaboratory comparison measurements of aspheres. Meas. Sci. Technol. 2018, 29, 055010. [Google Scholar] [CrossRef]
- Box, G.E.P.; Cox, D.R. An Analysis of Transformations. J. R. Stat. Soc. Ser. B 1964, 26, 211–243. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | − | + | Unit |
|---|---|---|---|
| IOM | - | ||
| PosCal | - | ||
| ΔR15 | 0 | 400 | nm |
| ΔR40 | 0 | 400 | nm |
| Δλ | 0 | 0.3 | nm |
| NoiseCal | 0 | 10 | nm |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
|---|---|---|---|---|---|---|---|---|
| IOM | - | - | - | + | - | + | + | + |
| PosCal | - | + | - | - | + | + | - | + |
| ΔR15 | + | - | + | - | - | + | - | + |
| ΔR40 | - | - | + | + | + | + | - | - |
| Δλ | + | + | - | + | - | + | + | - |
| NoiseCal | + | - | - | - | + | + | + | - |
| Parameter | − | + | Unit |
|---|---|---|---|
| Δx | 0 | 10 | μm |
| Δy | 0 | 10 | μm |
| Δz | 0 | 1 | μm |
| Δα | 0 | 0.3 | mrad |
| Δβ | 0 | 0.3 | mrad |
| Δγ | 0 | 0.3 | mrad |
| NoiseMeas | 0 | 10 | nm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Scholz, G.; Fortmeier, I.; Marschall, M.; Stavridis, M.; Schulz, M.; Elster, C. Experimental Design for Virtual Experiments in Tilted-Wave Interferometry. Metrology 2022, 2, 84-97. https://doi.org/10.3390/metrology2010006
Scholz G, Fortmeier I, Marschall M, Stavridis M, Schulz M, Elster C. Experimental Design for Virtual Experiments in Tilted-Wave Interferometry. Metrology. 2022; 2(1):84-97. https://doi.org/10.3390/metrology2010006
Chicago/Turabian StyleScholz, Gregor, Ines Fortmeier, Manuel Marschall, Manuel Stavridis, Michael Schulz, and Clemens Elster. 2022. "Experimental Design for Virtual Experiments in Tilted-Wave Interferometry" Metrology 2, no. 1: 84-97. https://doi.org/10.3390/metrology2010006