Comparing Charging Management Strategies for a Charging Station in a Parking Area in North Italy



Abstract
:1. Introduction
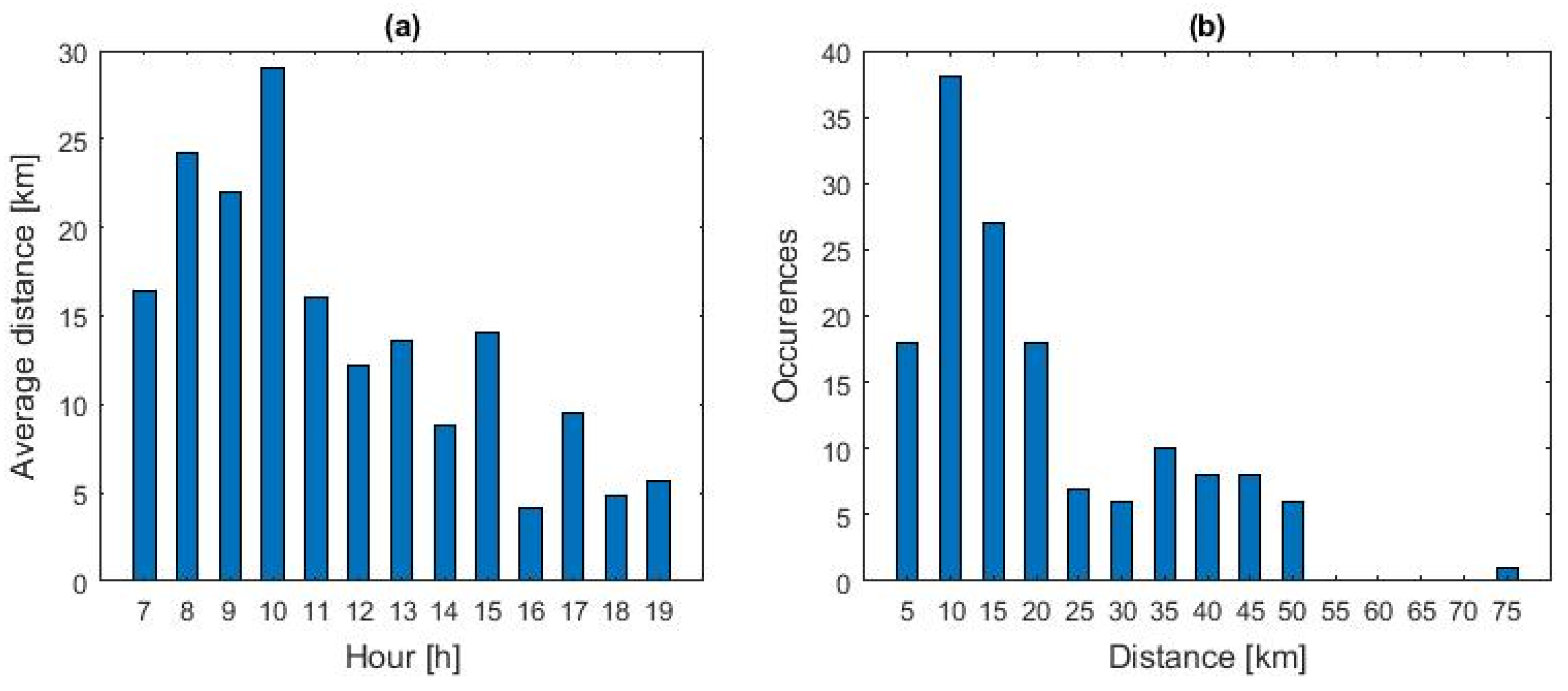
- The use of floating car data to determine parking attendance, as well as to estimate consumption.
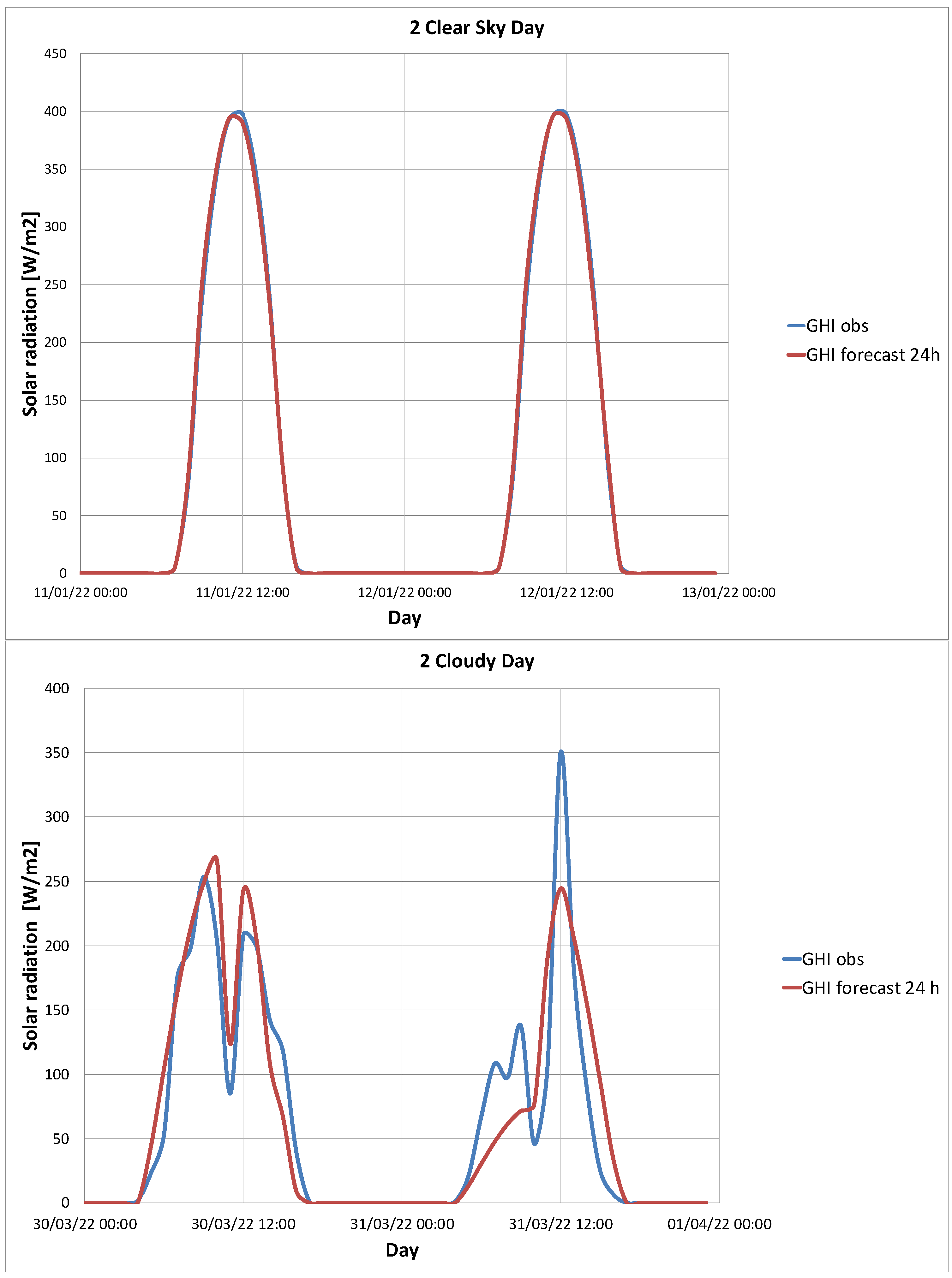
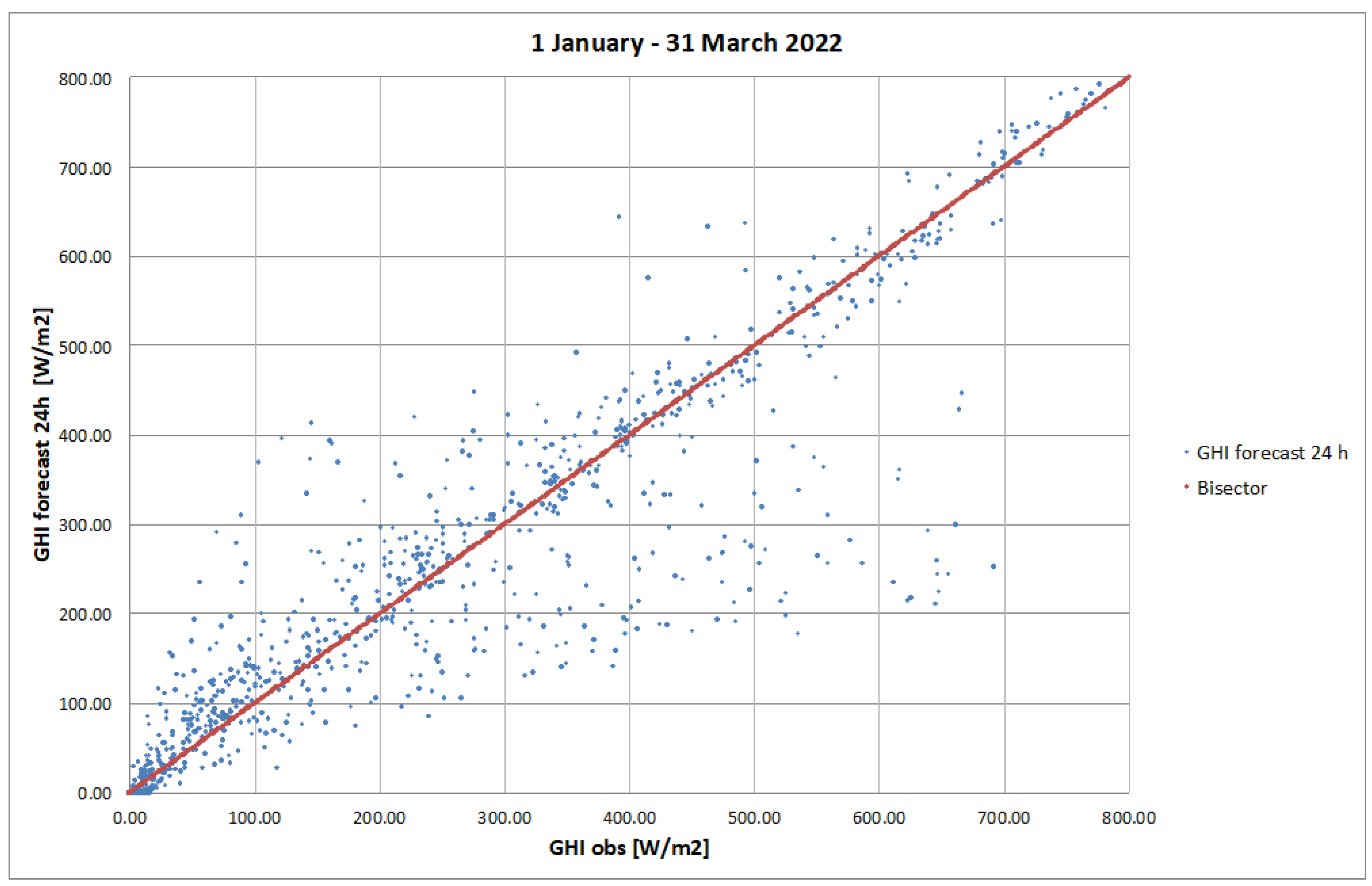
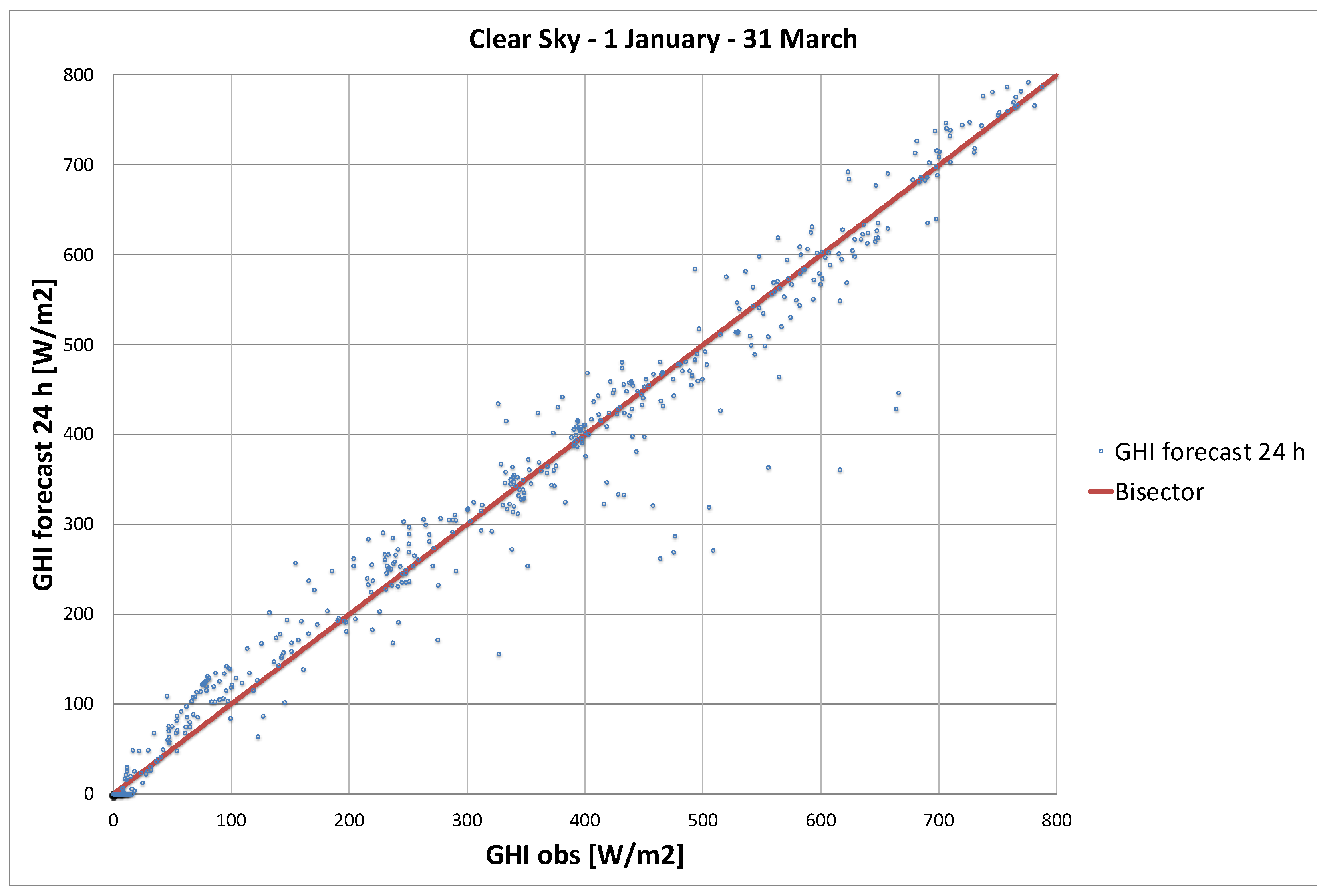
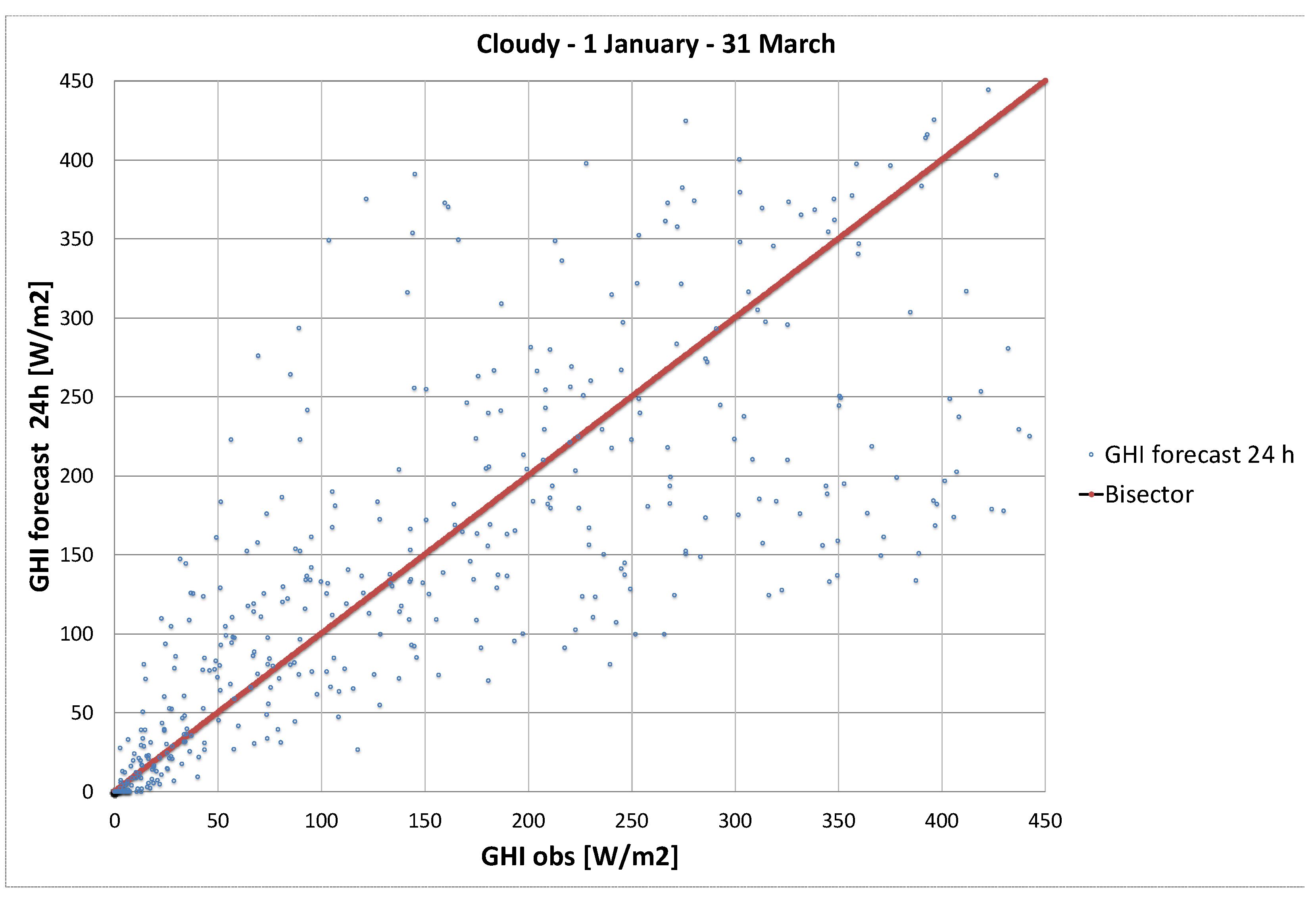
- The use of numerical weather prediction (NWP) models for insolation forecasts.
- The quantification of the economic advantage deriving from optimized management for the forecasts of the previous day compared to real-time management according to the variations between forecasted and actual values for load and insolation.
2. Materials and Methods
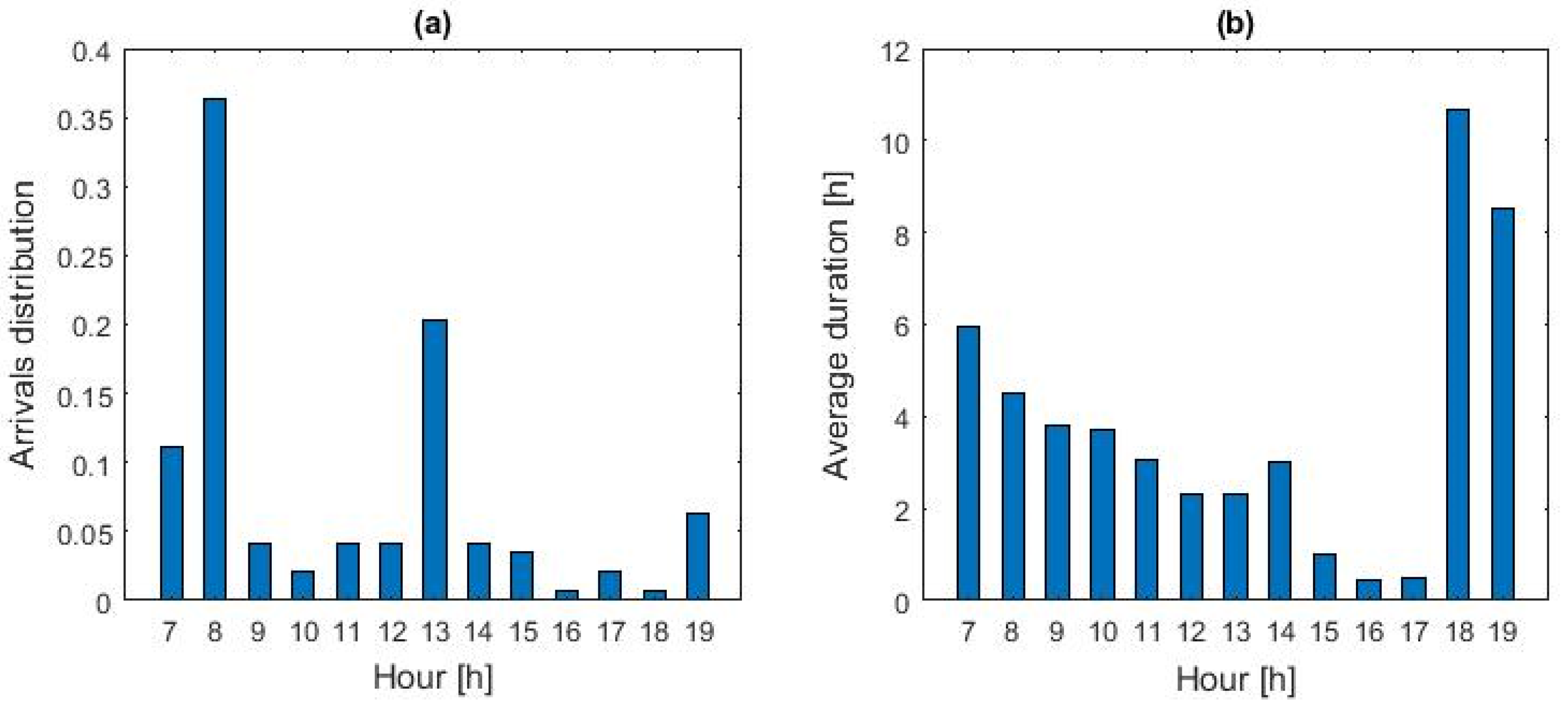
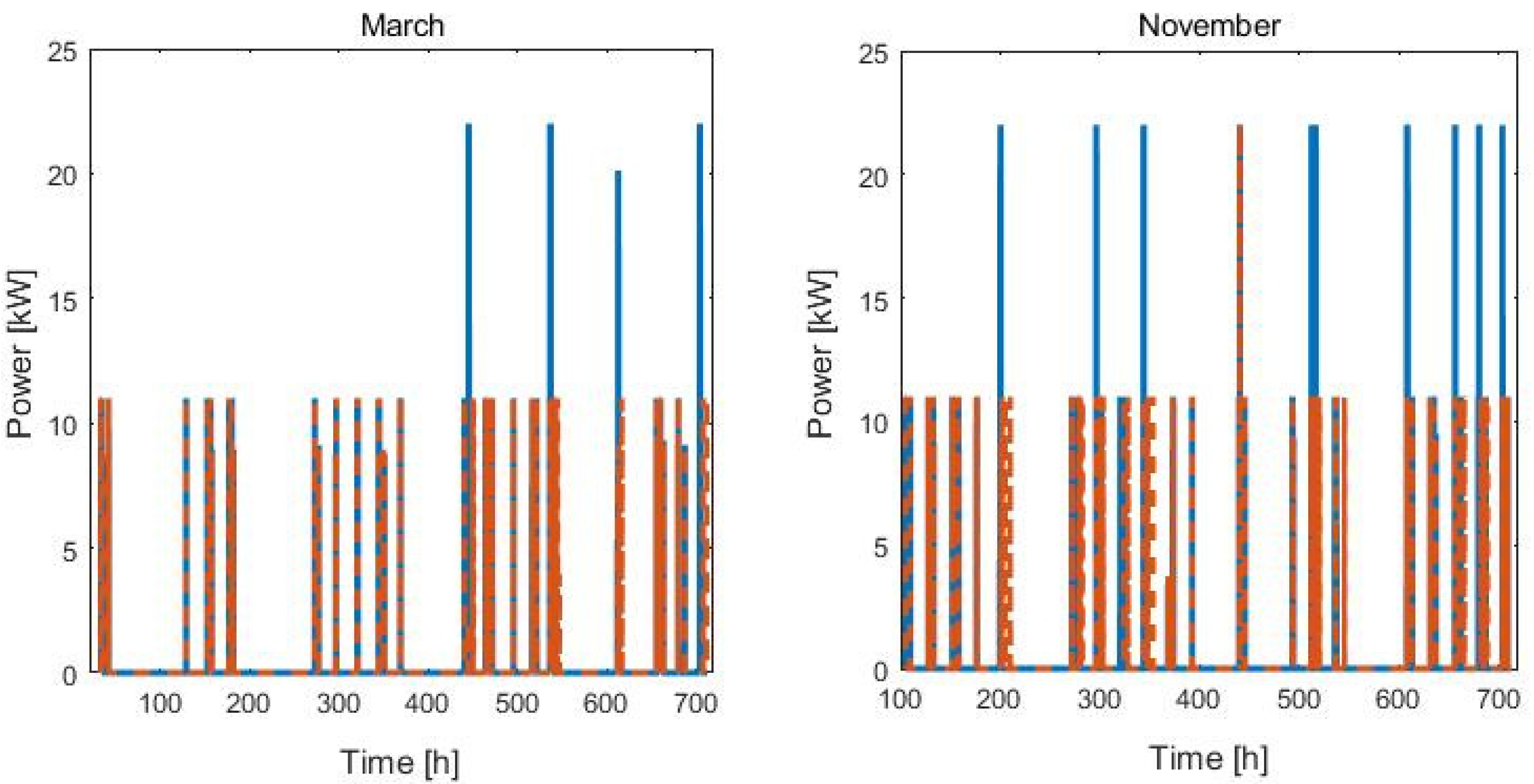
2.1. Load Profiles and Demand Management
- (a)
- First-in first-out (FIFO), in which users are served on a first-come first-served basis. There are no constraints on the charging power used in the station.
- (b)
- Linear optimization, in which the algorithm aims to keep the overall power used at the station below a certain threshold, applying a linear optimization method to modulate the individual charge’s power.
- Ignore the violation of the limit power constraint when it is impossible to find a solution to the problem and charge the requested energy.
- Admit the possibility of not supplying all the energy needed to comply with the power limits at the station.
2.2. Evaluation of the Cost-Effectiveness of Photovoltaic Sources and Storage
- is the time horizon of the investment in years;
- is the cash flow in the year, calculated as the difference between the cash flows with and without the PV + BSS system;
- is the initial investment calculated as the sum of PV and BSS capital expenditure (CAPEX);
- is the interest rate fixed at 3%.
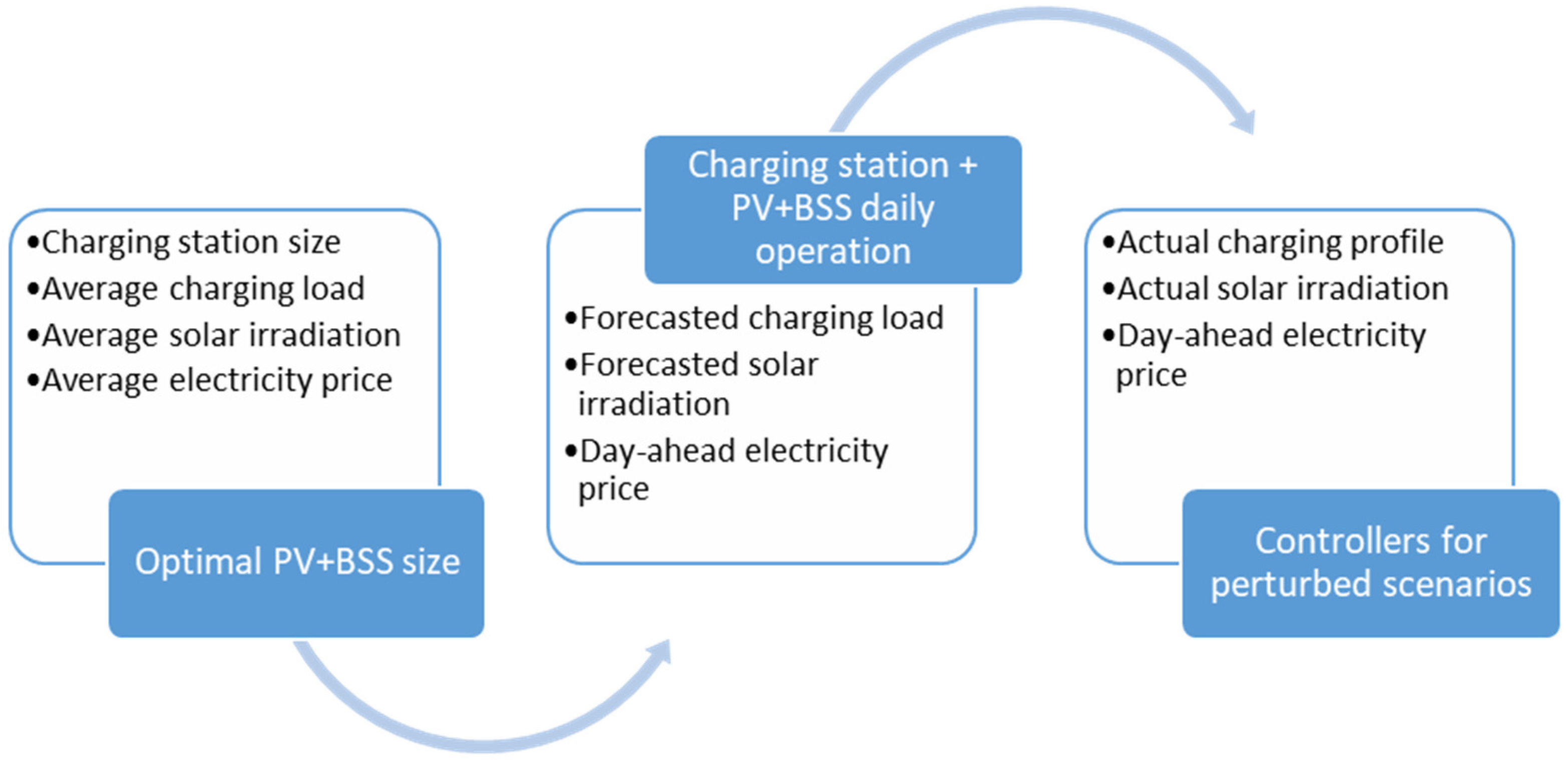
2.3. Optimization of Charging Infrastructure Daily Operation
3. Results
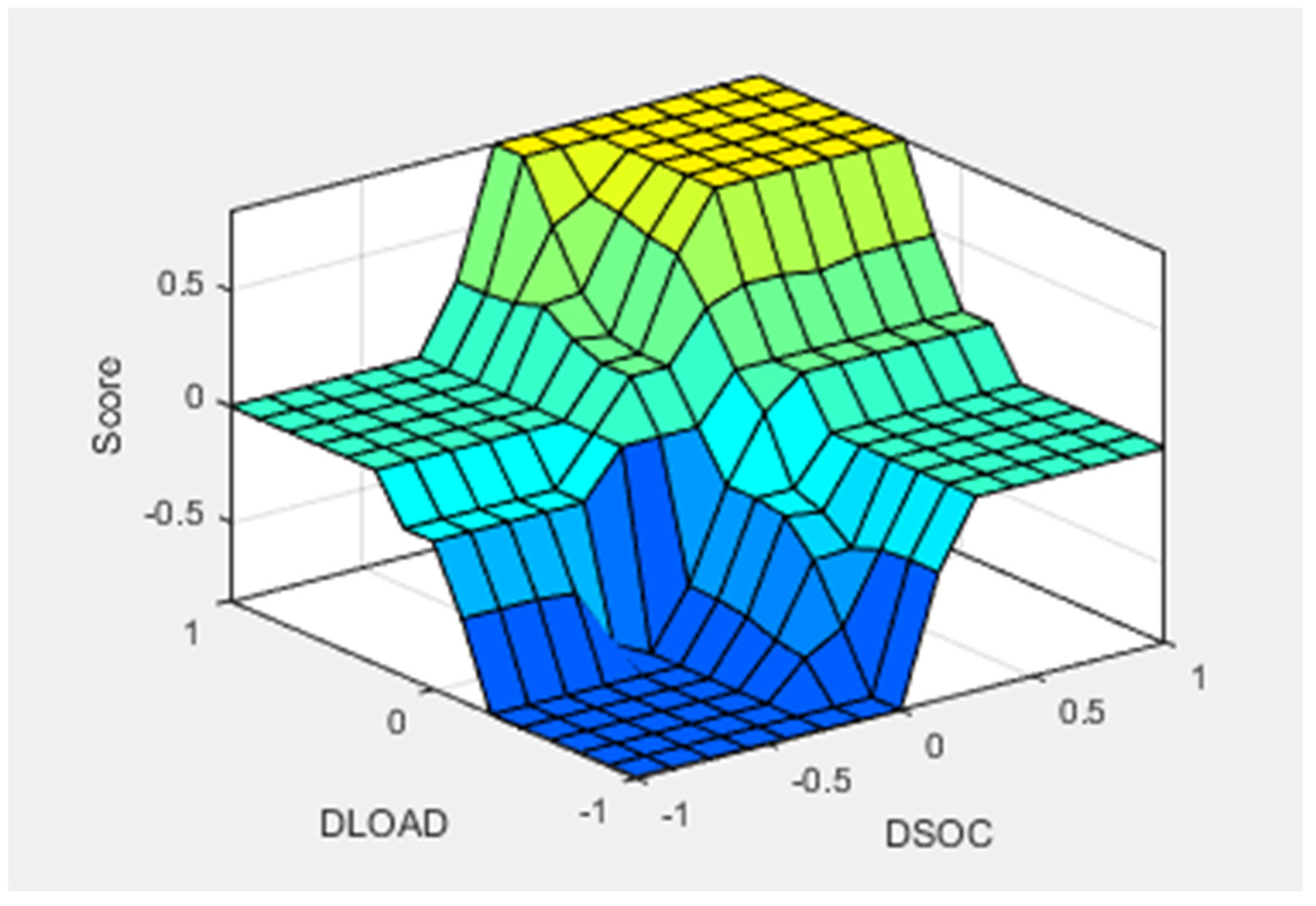
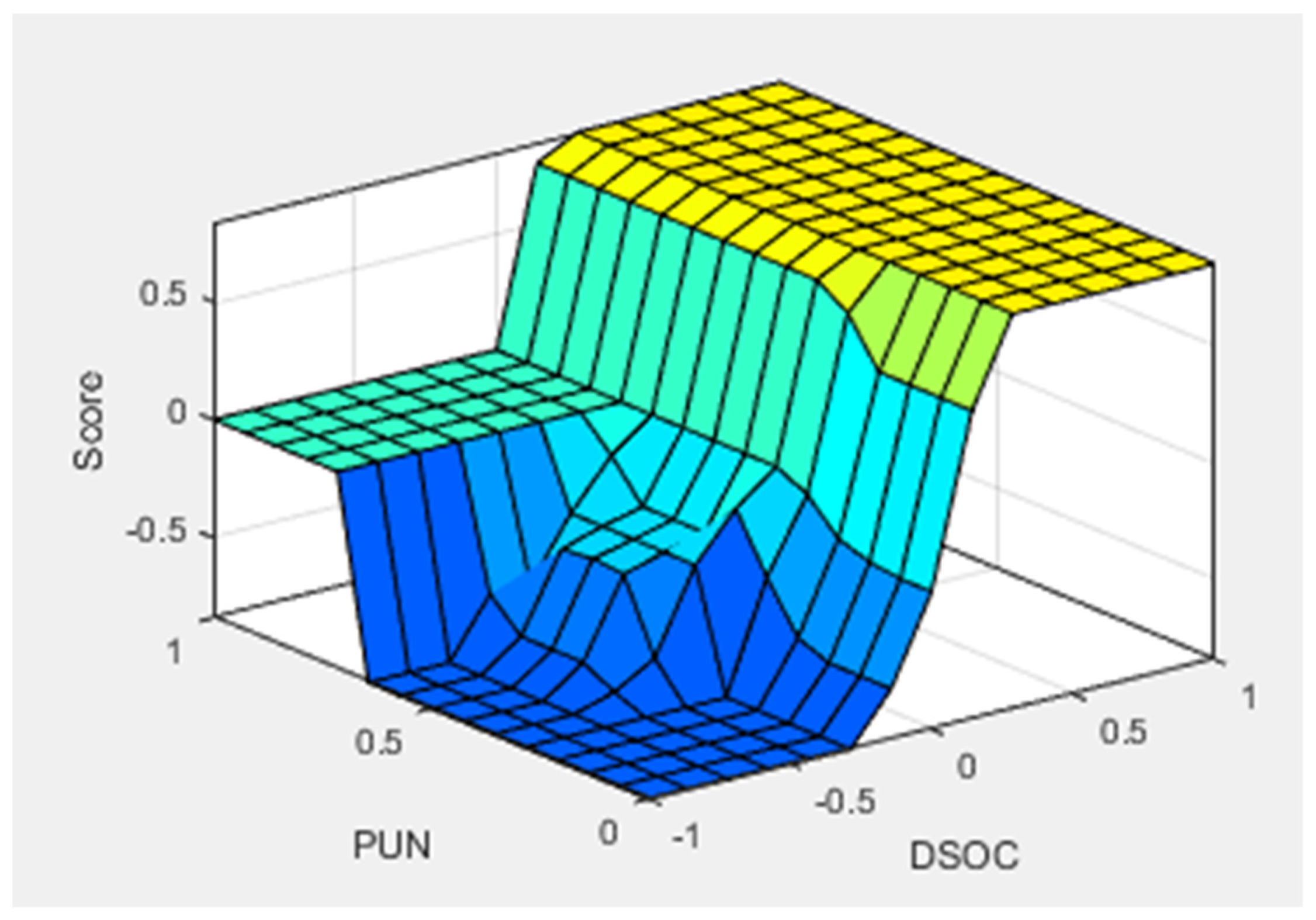
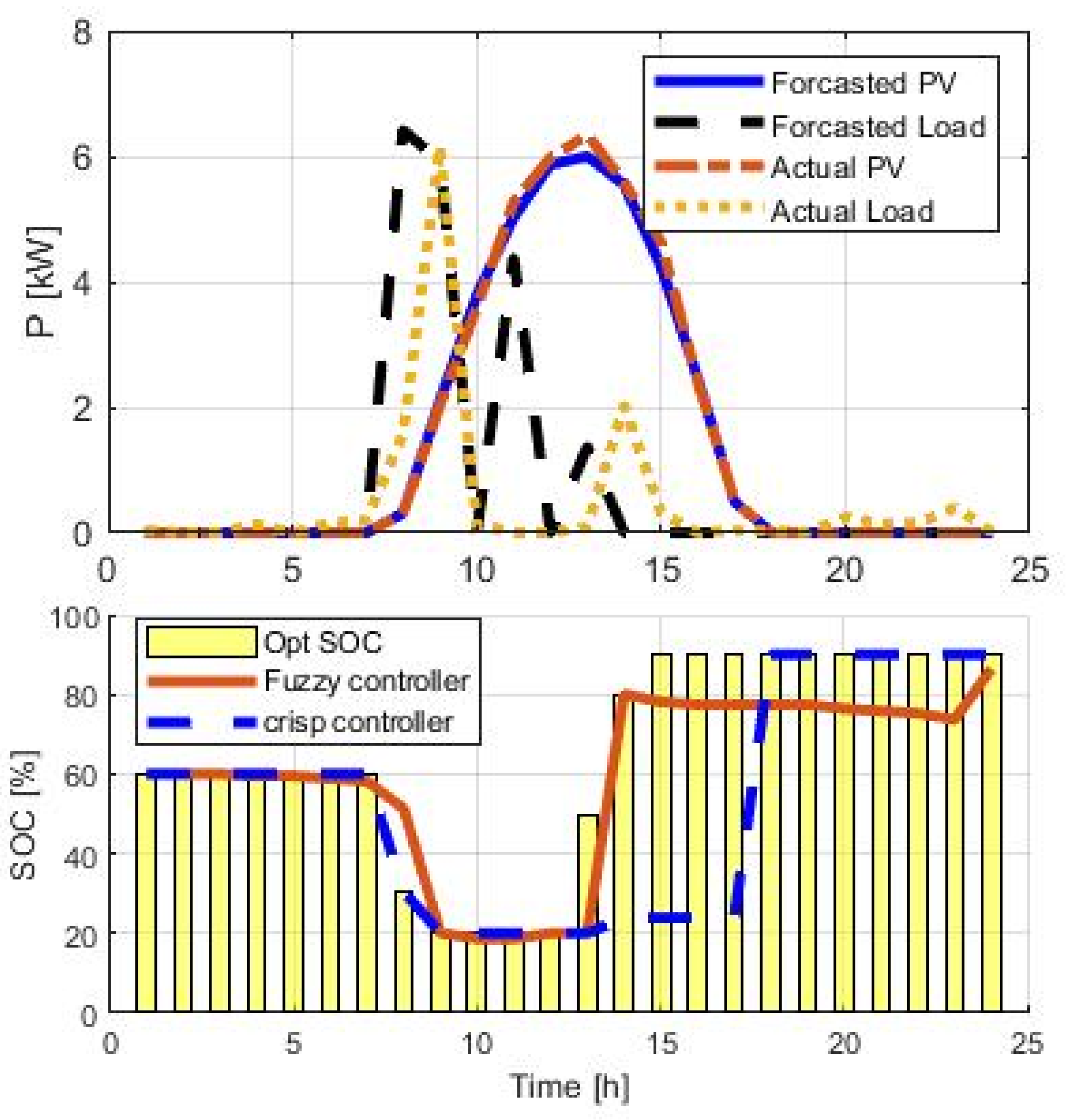
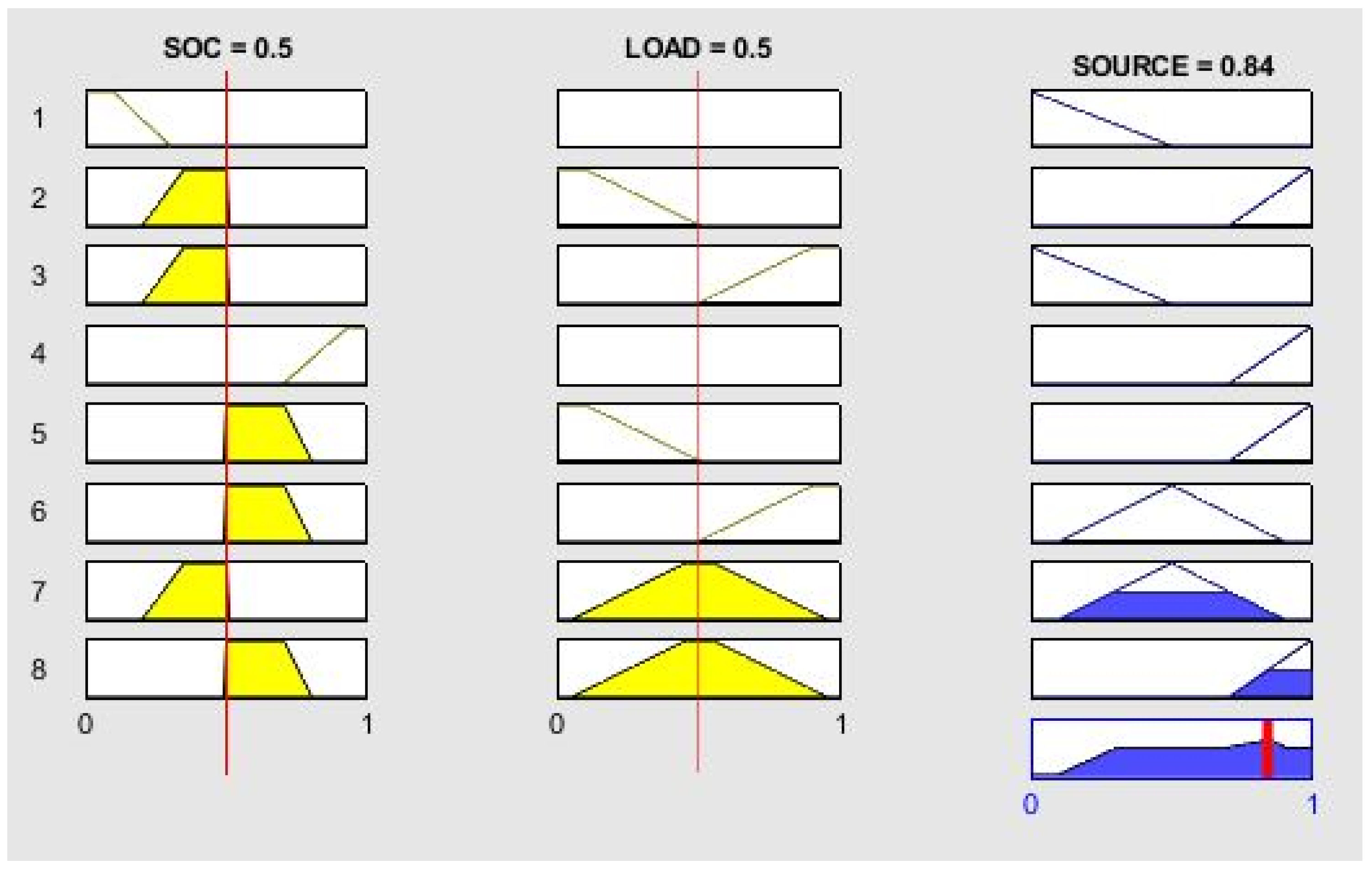
Fuzzy Controller for Optimal SOC Management
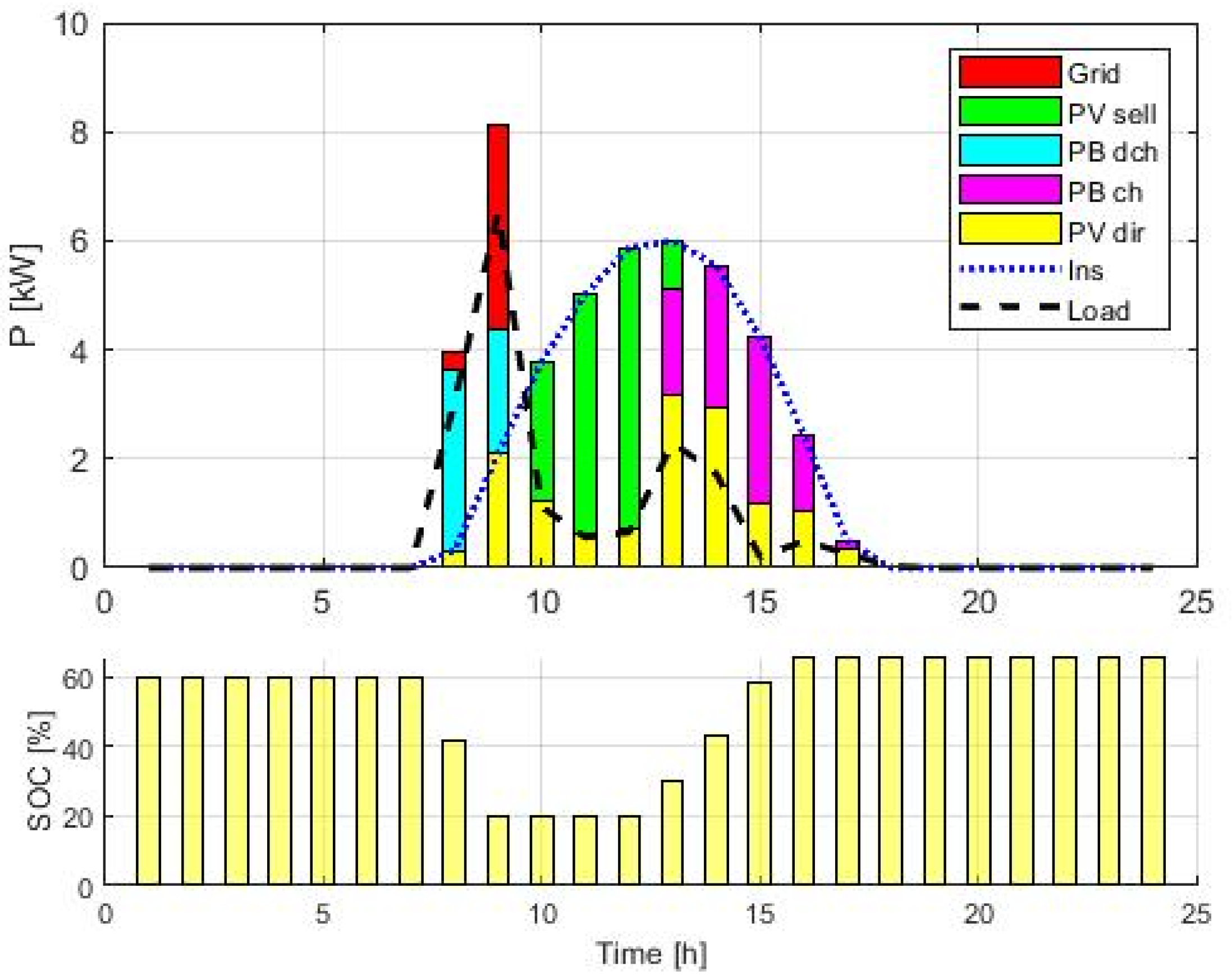
- The battery can be discharged below the optimal SOC to compensate for the insufficiency of renewable energy production.
- If the energy produced by the PV is greater than the request and the actual SOC is lower than the optimal one, recharge using excess energy until the optimal SOC value is reached.
- If the actual SOC is lower than the optimal one and there is no PV energy available, recharge until the optimal SOC value is reached if the grid energy price is lower than or equal to the average daily price.
- The perturbed charging demand is, on average, greater than the expected demand, given that the negative random values are set to zero, which makes the noise distribution skewed toward positive values.
- The SOC optimized for the forecasted quantities no longer coincides with the optimal trend for the actual situation. Trying to restore its optimal values can be counterproductive.
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. The Weather Research and Forecasting Model (WRF)
The Skill of WRF Model against the Observation Data




References
- Straubinger, A.; Verhoef, E.T.; de Groot, H.L. Going electric: Environmental and Welfare Impacts of Urban Ground and Air Transport. Transp. Res. Part D Transp. Environ. 2022, 102, 103146. [Google Scholar] [CrossRef]
- Dillman, K.J.; Árnadóttir, Á.; Heinonen, J.; Czepkiewicz, M.; Davíðsdóttir, B. Review and Meta-Analysis of EVs: Embodied Emissions and Environmental Breakeven. Sustainability 2020, 12, 9390. [Google Scholar] [CrossRef]
- European Commission Press Corner. Available online: https://ec.europa.eu/commission/presscorner/detail/en/IP_18_6543 (accessed on 8 February 2023).
- Kaushik, E.; Prakash, V.; Mahela, O.P.; Khan, B.; El-Shahat, A.; Abdelaziz, A.Y. Comprehensive Overview of Power System Flexibility during the Scenario of High Penetration of Renewable Energy in Utility Grid. Energies 2022, 15, 516. [Google Scholar] [CrossRef]
- Worku, M.Y. Recent Advances in Energy Storage Systems for Renewable Source Grid Integration: A Comprehensive Review. Sustainability 2022, 14, 5985. [Google Scholar] [CrossRef]
- Strielkowski, W.; Civín, L.; Tarkhanova, E.; Tvaronavičienė, M.; Petrenko, Y. Renewable Energy in the Sustainable Development of Electrical Power Sector: A Review. Energies 2021, 14, 8240. [Google Scholar] [CrossRef]
- Jenn, A.; Highleyman, J. Distribution Grid Impacts Of Electric Vehicles: A California Case Study. iScience 2022, 25, 103686. [Google Scholar] [CrossRef]
- Dallinger, D.; Gerda, S.; Wietschel, M. Integration of Intermittent Renewable Power Supply Using Grid-Connected Vehicles—A 2030 Case Study for California and Germany. Appl. Energy 2013, 104, 666–682. [Google Scholar] [CrossRef]
- Alkawsi, G.; Baashar, Y.; Abbas, U.D.; Alkahtani, A.A.; Tiong, S.K. Review of Renewable Energy-Based Charging Infrastructure for Electric Vehicles. Appl. Sci. 2021, 11, 3847. [Google Scholar] [CrossRef]
- Sbordone, D.; Bertini, I.; Di Pietra, B.; Falvo, M.; Genovese, A.; Martirano, L. EV Fast Charging Stations and Energy Storage Technologies: A Real Implementation in the Smart Micro Grid Paradigm. Electr. Power Syst. Res. 2015, 120, 96–108. [Google Scholar] [CrossRef]
- Mancini, E.; Longo, M.; Yaici, W.; Zaninelli, D. Assessment of the Impact of Electric Vehicles on the Design and Effectiveness of Electric Distribution Grid with Distributed Generation. Appl. Sci. 2020, 10, 5125. [Google Scholar] [CrossRef]
- Preetham, G.; Shireen, W. Photovoltaic Charging Station for Plug-In Hybrid Electric Vehicles in a Smart Grid Environment. In Proceedings of the IEEE PES Innovative Smart Grid Technologies (ISGT), Washington, DC, USA, 16–20 January 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Chandra, G.R.; Bauer, P.; Zeman, M. System Design for a Solar Powered Electric Vehicle Charging Station For Workplaces. Appl. Energy 2016, 168, 434–443. [Google Scholar] [CrossRef]
- Wu, D.; Zeng, H.; Lu, C.; Boulet, B. Two-Stage Energy Management for Office Buildings With Workplace EV Charging and Renewable Energy. IEEE Trans. Transp. Electrif. 2017, 3, 225–237. [Google Scholar] [CrossRef]
- Hardman, S.; Jenn, A.; Tal, G.; Axsen, J.; Beard, G.; Daina, N.; Figenbaum, E.; Jakobsson, N.; Jochem, P.; Kinnear, N.; et al. A Review of Consumer Preferences of and Interactions with Electric Vehicle Charging Infrastructure. Transp. Res. Part D Transp. Environ. 2018, 62, 508–523. [Google Scholar] [CrossRef]
- Tahara, H.; Urasaki, N.; Senjyu, T.; Funabashi, T. EV Charging Station Using Renewable Energy. In Proceedings of the 2016 IEEE First International Conference on Control, Measurement and Instrumentation (CMI), Kolkata, India, 8–10 January 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 48–52. [Google Scholar] [CrossRef]
- Bose, P.; Sivraj, P. Smart Charging Infrastructure for Electric Vehicles in a Charging Station. In Proceedings of the 2020 4th International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 13–15 May 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 186–192. [Google Scholar] [CrossRef]
- Tavakoli, A.; Saha, S.; Arif, M.T.; Haque, E.; Mendis, N.; Oo, A.M. Impacts of Grid Integration of Solar PV and Electric Vehicle on Grid Stability, Power Quality and Energy Economics: A Review. IET Energy Syst. Integr. 2020, 2, 243–260. [Google Scholar] [CrossRef]
- Badawy, M.O.; Sozer, Y. Power Flow Management of a Grid Tied PV-Battery System for Electric Vehicles Charging. IEEE Trans. Ind. Appl. 2017, 53, 1347–1357. [Google Scholar] [CrossRef]
- Shin, M.; Choi, D.-H.; Kim, J. Cooperative Management for PV/ESS-Enabled Electric Vehicle Charging Stations: A Multiagent Deep Reinforcement Learning Approach. IEEE Trans. Ind. Inform. 2019, 16, 3493–3503. [Google Scholar] [CrossRef]
- Li, D.; Zouma, A.; Liao, J.-T.; Yang, H.-T. An Energy Management Strategy with Renewable Energy and Energy Storage System for a Large Electric Vehicle Charging Station. Etransportation 2020, 6, 100076. [Google Scholar] [CrossRef]
- Mohamed, A.; Salehi, V.; Ma, T.; Mohammed, O. Real-Time Energy Management Algorithm for Plug-In Hybrid Electric Vehicle Charging Parks Involving Sustainable Energy. IEEE Trans. Sustain. Energy 2014, 5, 577–586. [Google Scholar] [CrossRef]
- VEM-Solutions. Available online: https://www.vemsolutions.it (accessed on 20 January 2023).
- Available online: https://www.openinnovation.regione.lombardia.it/it/b/38399/infrastrutture-e-servizi-per-la-mobilit-sostenibile-e-resiliente (accessed on 8 February 2023).
- Karagulian, F.; Messina, G.; Valenti, G.; Liberto, C.; Carapellucci, F. A Simplified Map-Matching Algorithm for Floating Car Data. In Lecture Notes in Networks and Systems; Springer Science and Business Media Deutschland GmbH: Berlin/Heidelberg, Germany, 2021; Volume 227, pp. 711–720. [Google Scholar]
- Available online: https://www.newsauto.it/notizie/auto-elettrica-quanto-costa-ricaricare-e-quanto-consuma-costo-corrente-energia-elettrica-ev-2020-243194/#foto-42 (accessed on 8 February 2023).
- Available online: https://it.mathworks.com/help/symbolic/sym.solve.html (accessed on 8 February 2023).
- Available online: https://www.mathworks.com/help/optim/ug/linprog.html (accessed on 8 February 2023).
- IRENA. Electricity Storage and Renewables: Costs and Markets to 2030. Ottobre. 2017. Available online: https://www.irena.org/publications/2017/Oct/Electricity-storage-and-renewables-costs-and-markets (accessed on 8 February 2023).
- Figgener, J.; Stenzel, P.; Kairies, K.-P.; Linßen, J.; Haberschusz, D.; Wessels, O.; Angenendt, G.; Robinius, M.; Stolten, D.; Sauer, D.U. The Development of Stationary Battery Storage Systems in Germany—A Market Review. J. Energy Storage 2020, 29, 101153. [Google Scholar] [CrossRef]
- Available online: https://www.forbes.com/home-improvement/solar/how-long-do-solar-panels-last/ (accessed on 20 January 2023).
- Available online: https://www.beny.com/ev-charger-and-charging-station-maintenance/ (accessed on 20 January 2023).
- Available online: https://www.gny.com/products/electric-vehicle-charging-stations (accessed on 20 January 2023).
- Available online: http://www.europeanenergyinnovation.eu/Articles/Winter-2016/Costs-and-Economics-of-Electricity-from-Residential-PV-Systems-in-Europe (accessed on 22 February 2020).
- Vartiainen, E.; Masson, G.; Breyer, C.; Moser, D.; Román Medina, E. Impact of Weighted Average Cost of Capital, Capital Expenditure, and Other Parameters on Future Utility-scale PV Levelised Cost of Electricity. Prog. Photovolt. Res. Appl. 2020, 28, 439–453. [Google Scholar] [CrossRef]
- Battery Energy Storage White Paper, SUSCHEM. 2018. Available online: https://www.suschem.org/publications (accessed on 11 September 2020).
- Mongird, K.; Viswanathan, V.V.; Balducci, P.J.; Alam MJ, E.; Fotedar, V.; Koritarov, V.S.; Hadjerioua, B. Energy Storage Technology and Cost Characterization Report. United States. 2019. Available online: https://energystorage.pnnl.gov/pdf/PNNL-28866.pdf (accessed on 8 February 2023).
- Andrenacci, N.; Di Monaco, M.; Tomasso, G. Influence of Battery Aging on the Operation of a Charging Infrastructure. Energies 2022, 15, 9588. [Google Scholar] [CrossRef]
- Lofti, A.Z. Fuzzy sets and systems. In System Theory; Fox, J., Ed.; Polytechnic Press: Brooklyn, NY, USA, 1965; pp. 29–39. [Google Scholar]
- Zadeh, L.A. Outline of a new approach to the analysis of complex systems and decision processes. IEEE Trans. Syst. Man Cybern. 1973, 1, 28–44. [Google Scholar] [CrossRef]
- Available online: https://www.mathworks.com/help/fuzzy/index.html?s_tid=CRUX_lftnav (accessed on 8 February 2023).
- Van Geenhuizen, M.; Nijkamp, P. Coping with uncertainty: An expedition into the field of new transport technology. Transp. Plan. Technol. 2003, 26, 449–467. [Google Scholar] [CrossRef]
- Gnann, T.; Plötz, P.; Kühn, A.; Wietschel, M. Modelling market diffusion of electric vehicles with real world driving data—German market and policy options. Transp. Res. Part A: Policy Pract. 2015, 77, 95–112. [Google Scholar] [CrossRef]
- Cavallaro, F.; Nocera, S. Are transport policies and economic appraisal aligned in evaluating road externalities? Transp. Res. Part D Transp. Environ. 2022, 106, 103266. [Google Scholar] [CrossRef]
- Available online: https://glossary.ametsoc.org/wiki/Welcome (accessed on 8 February 2023).
- Available online: https://www.climate.gov/maps-data/climate-data-primer/predicting-climate/climate-models (accessed on 8 February 2023).
- Balog, I.; Ruti, P.M.; Tobin, I.; Armenio, V.; Vautard, R. A Numerical Approach for Planning Offshore Wind Farms from Regional to Local Scales over the Mediterranean. Renew. Energy 2016, 85, 395–405. [Google Scholar] [CrossRef]
- Tobin, I.; Vautard, R.; Balog, I.; Bréon, F.-M.; Jerez, S.; Ruti, P.M.; Thais, F.; Vrac, M.; Yiou, P. Assessing Climate Change Impacts on European Wind Energy from ENSEMBLES High-Resolution Climate Projections. Clim. Chang. 2015, 128, 99–112. [Google Scholar] [CrossRef]
- Balog, I.; Fuoco, D.; Mendicino, G.; Senatore, A.; Caputo, G.; Spinelli, F.; Lepore, M.; Franconiero, D.; Mautone, P.; Oliviero, M. Previsione di Producibilità e Carico, Rapporto Tecnico—D5.3, Modelli Previsionali di Producibilita: Ambiti Applicativi, Rapporto Tecnico di Ricerca Industriale D5.3a. Available online: http://www.comesto.eu/wp-content/uploads/2022/12/ComESto-D5.3a-Modelli-previsionali-di-producibilita%CC%80.pdf (accessed on 8 February 2023).
- Giaconia, A.; Iaquaniello, G.; Metwally, A.A.; Caputo, G.; Balog, I. Experimental Demonstration and Analysis of a CSP Plant with Molten Salt Heat Transfer Fluid in Parabolic Troughs. Sol. Energy 2020, 211, 622–632. [Google Scholar] [CrossRef]
- Best Practices Handbook for the Collection and Use of Solar Resource Data for Solar Energy Applications: Third Edition. Available online: https://iea-pvps.org/key-topics/best-practices-handbook-for-the-collection-and-use-of-solar-resource-data-for-solar-energy-applications-third-edition/ (accessed on 8 February 2023).
- WRF Community. Weather Research and Forecasting (WRF) Model, UCAR/NCAR. 2000. Available online: https://www.mmm.ucar.edu/models/wrf (accessed on 8 February 2023).
- Balog, I.; Caputo, G.; Iatauro, D.; Signoretti, P.; Spinelli, F. Downscaling of Hourly Climate Data for the Assessment of Building Energy Performance. Sustainability 2023, 15, 2762. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gaussian Standard Deviation | 0.01 | 0.05 | 0.10 | 0.50 |
|---|---|---|---|---|
| Average ΔPV (%) | −0.0034 | −0.001 | 0.01 | 0.064 |
| Average Δload (%) | 0.35 | 1.8 | 3.5 | 17 |
| Gaussian Standard Deviation | 0.01 | 0.05 | 0.10 | 0.50 |
|---|---|---|---|---|
| skewness ΔPV | 0.0004 | −0.0007 | −0.018 | −0.0013 |
| skewness Δload | 1.16 | 1.16 | 1.15 | 1.16 |
| Fuzzy Controller | ||||
|---|---|---|---|---|
| Standard Deviation PV | ||||
| Standard Deviation Load | 0.01 | 0.05 | 0.1 | 0.5 |
| 0.01 | 20.02% | 23.41% | 24.88% | 36.13% |
| 0.05 | 19.28% | 22.48% | 24.32% | 37.04% |
| 0.1 | 20.76% | 22.76% | 27.78% | 37.73% |
| 0.5 | 31.54% | 30.78% | 33.11% | 43.58% |
| Fuzzy Real-Time | ||||
|---|---|---|---|---|
| Standard Deviation PV | ||||
| Standard Deviation Load | 0.01 | 0.05 | 0.1 | 0.5 |
| 0.01 | 22.41% | 22.25% | 22.03% | 22.43% |
| 0.05 | 24.97% | 23.59% | 24.42% | 23.71% |
| 0.1 | 25.00% | 24.84% | 24.50% | 23.98% |
| 0.5 | 33.42% | 32.58% | 33.82% | 31.26% |
| Fuzzy Controller | ||||
| Standard Deviation PV | ||||
| Standard Deviation Load | 0.01 | 0.05 | 0.1 | 0.5 |
| 0.01 | 26.73% | 29.09% | 32.62% | 45.80% |
| 0.05 | 24.27% | 29.73% | 31.41% | 45.13% |
| 0.1 | 24.65% | 28.63% | 32.45% | 46.22% |
| 0.5 | 37.51% | 37.95% | 40.27% | 53.38% |
| Fuzzy Real-Time | ||||
| Standard Deviation PV | ||||
| Standard Deviation Load | 0.01 | 0.05 | 0.1 | 0.5 |
| 0.01 | 25.29% | 25.32% | 26.10% | 24.56% |
| 0.05 | 25.19% | 26.55% | 25.25% | 24.99% |
| 0.1 | 27.04% | 26.66% | 26.70% | 26.03% |
| 0.5 | 35.36% | 34.96% | 35.55% | 34.59% |
| ΔLoad | 0.01 | 0.05 | 0.1 | 0.5 |
|---|---|---|---|---|
| Δcost/DPV correlation Fuzzy controller | 0.99 | 0.98 | 0.98 | 1.00 |
| Δcost/ΔPV correlation Fuzzy real-time | −0.20 | −0.52 | −0.95 | −0.85 |
| ΔLoad | 0.01 | 0.05 | 0.1 | 0.5 |
|---|---|---|---|---|
| Δcost/DPV correlation Fuzzy controller | 0.95 | 0.97 | 0.98 | 0.99 |
| Δcost/ΔPV correlation Fuzzy real-time | 1.00 | 1.00 | 0.99 | 1.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andrenacci, N.; Caputo, G.; Balog, I. Comparing Charging Management Strategies for a Charging Station in a Parking Area in North Italy. Future Transp. 2023, 3, 684-707. https://doi.org/10.3390/futuretransp3020040
Andrenacci N, Caputo G, Balog I. Comparing Charging Management Strategies for a Charging Station in a Parking Area in North Italy. Future Transportation. 2023; 3(2):684-707. https://doi.org/10.3390/futuretransp3020040
Chicago/Turabian StyleAndrenacci, Natascia, Giampaolo Caputo, and Irena Balog. 2023. "Comparing Charging Management Strategies for a Charging Station in a Parking Area in North Italy" Future Transportation 3, no. 2: 684-707. https://doi.org/10.3390/futuretransp3020040