
Advances of UAVs toward Future Transportation: The State-of-the-Art, Challenges, and Opportunities



Abstract
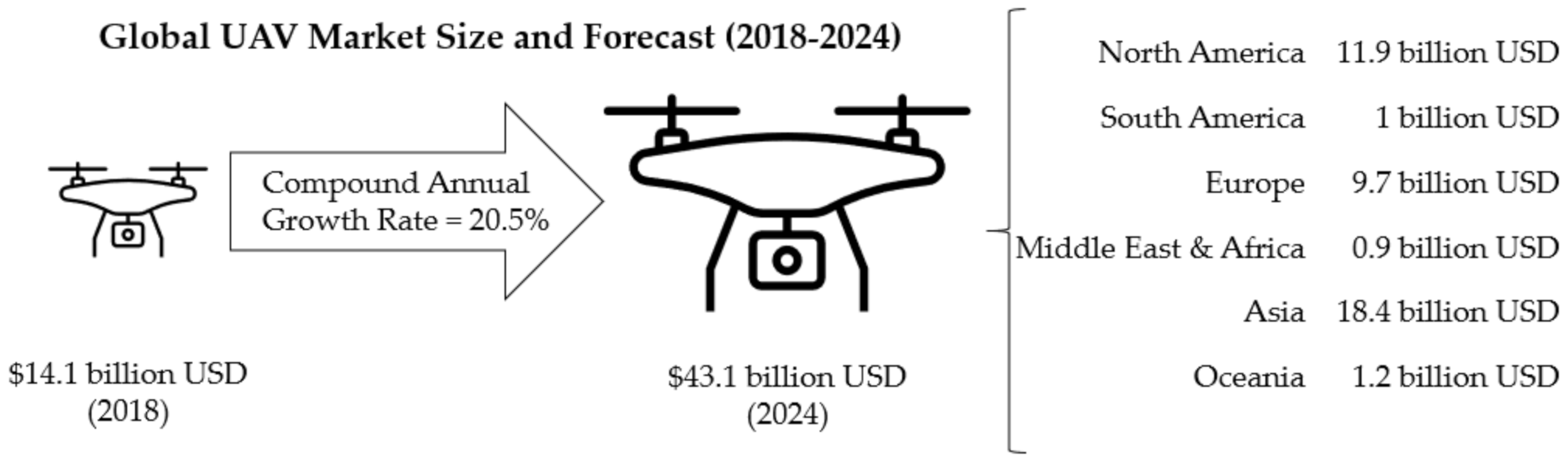
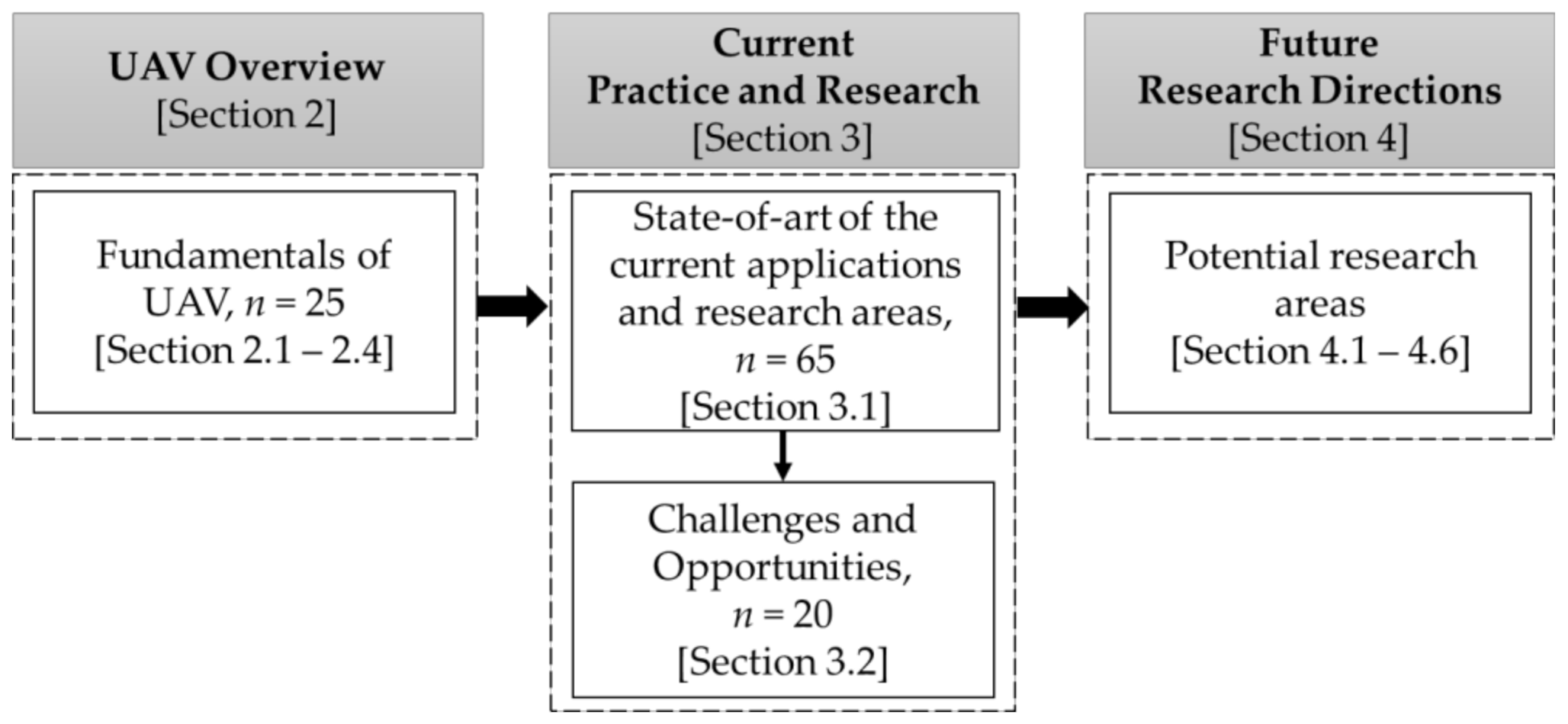
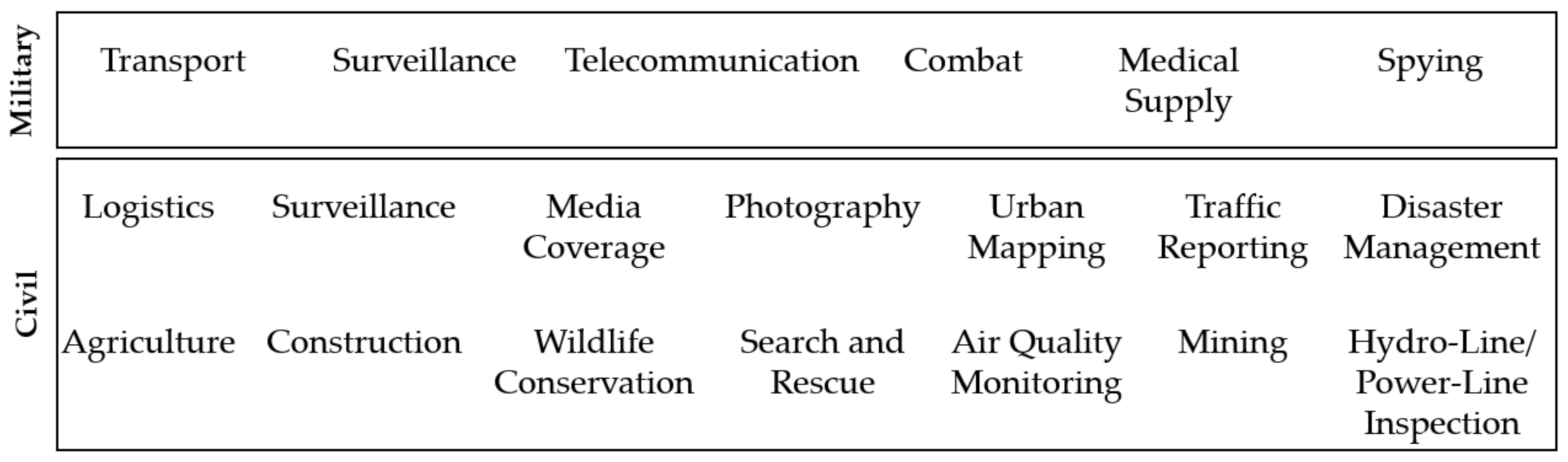
:1. Introduction
2. UAVs Overview
2.1. General Specifications
2.2. Performance Measure
2.3. UAV Networks and Communications
2.3.1. General Systems
2.3.2. Communications and Networks Systems
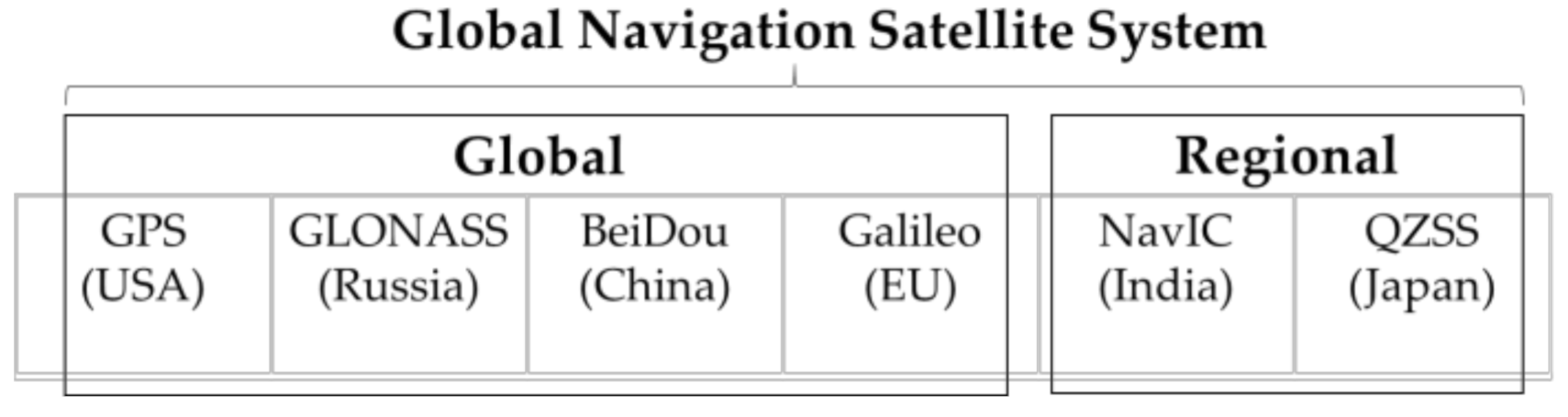
2.3.3. Navigation Systems
2.3.4. Software Architecture
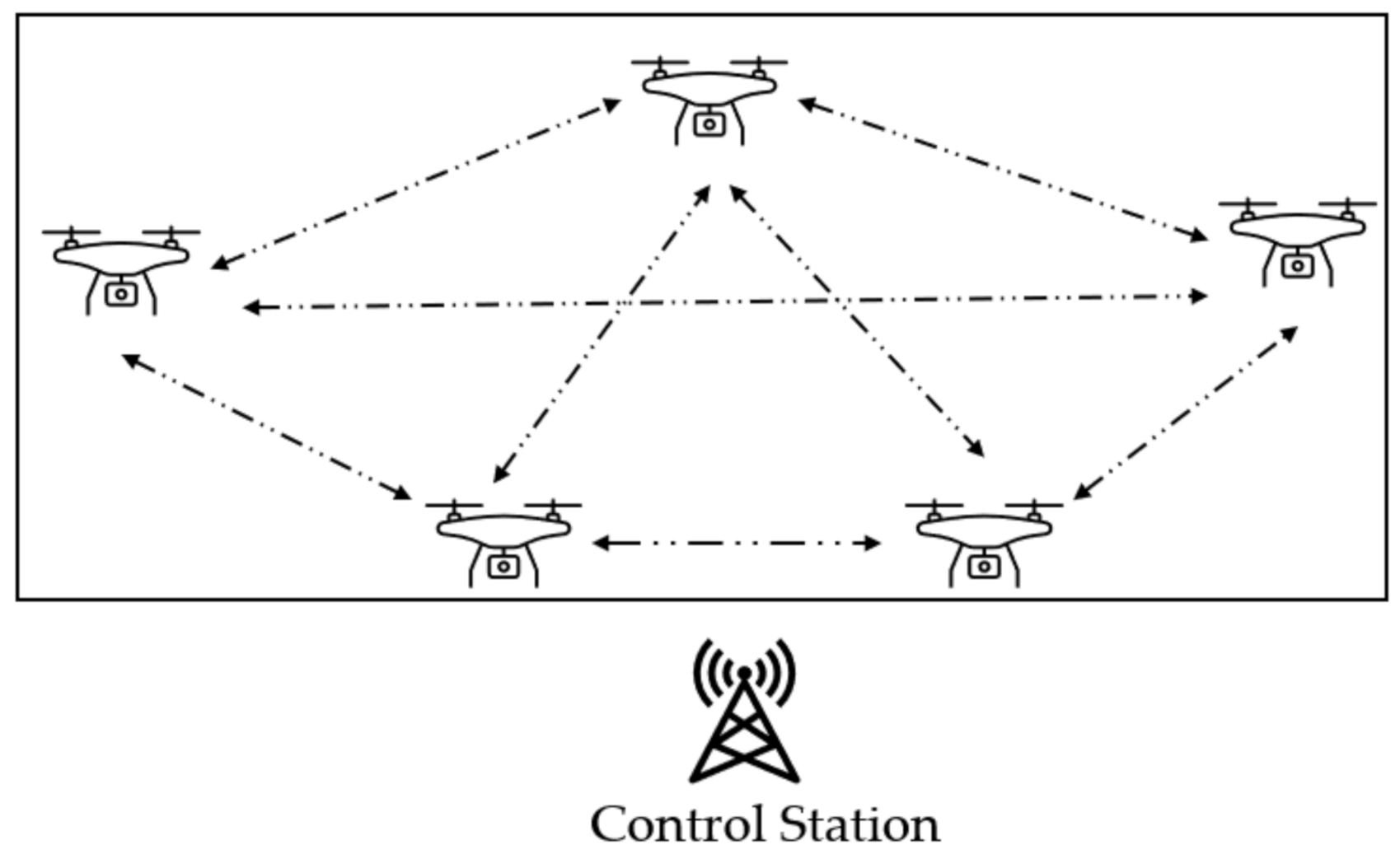
2.3.5. Swarms
2.4. UAV Security and Privacy
3. State of the Art of Practice and Research
3.1. Current Practice and Research
3.1.1. Surveillance of Future Transportation Activities
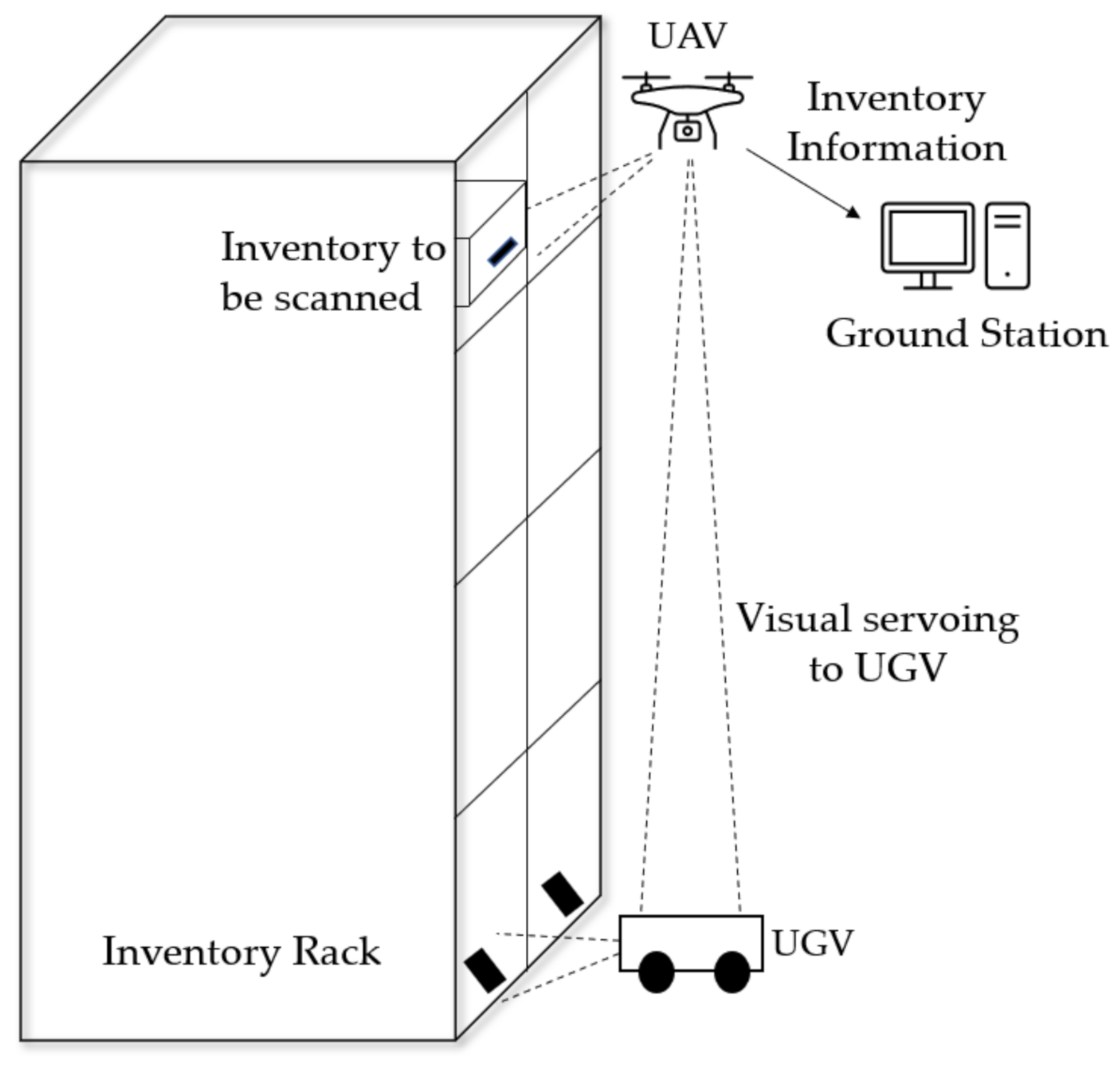
3.1.2. Future Logistics—Inventory Management
3.1.3. Future Logistics—Delivery Services and Load Transportation
3.1.4. Remote Sensing of Future Transportation Infrastructures
3.1.5. Urban Planning of Future Transportation Infrastructures
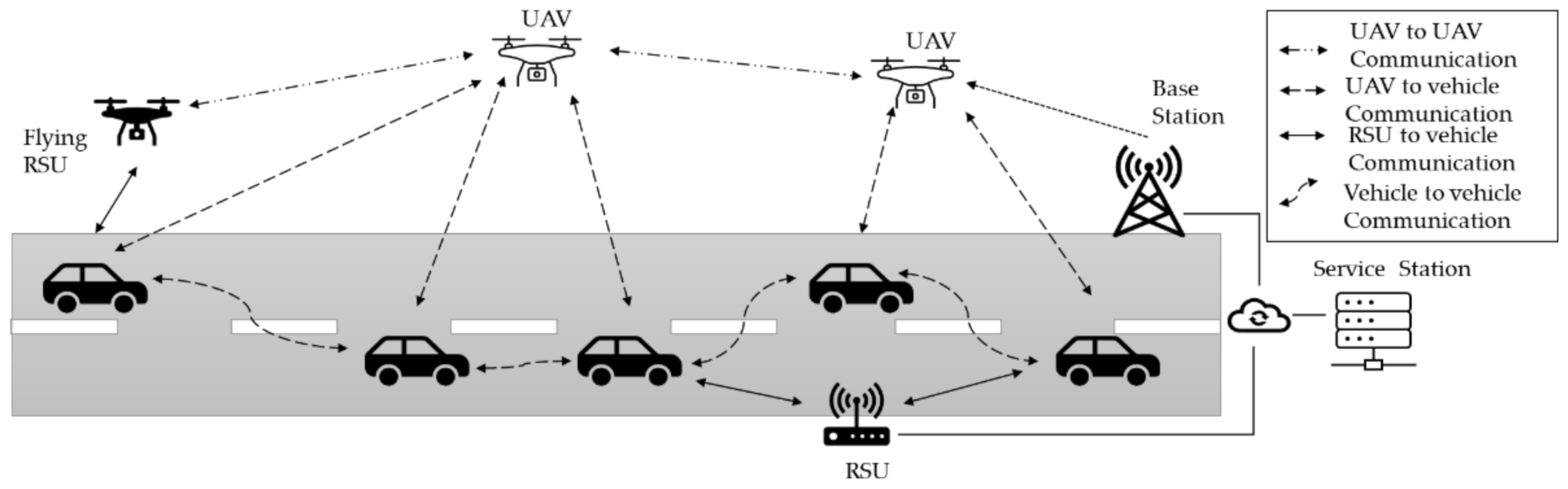
3.1.6. Future Intelligent Transportation Systems (ITS)
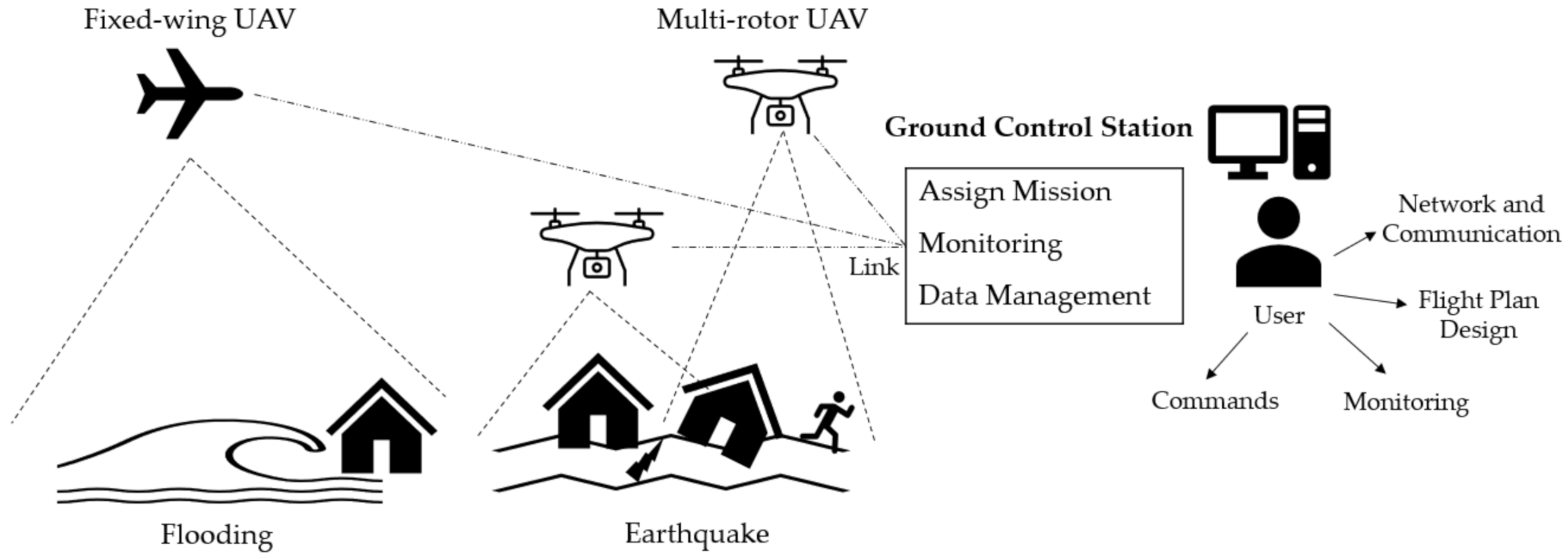
3.1.7. Future Transportation for Emergency Response and Management
3.2. Challenges and Opportunities
4. Potential Research Directions
4.1. Artificial Intelligence (AI) and Autonomous UAVs
4.2. UAV Deployment Optimization
4.3. Design UAVs for ITS
4.4. Security in ITS
4.5. Energy Optimization
4.6. Limitations in Information
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Škrinjar, J.P.; Skorput, P.; Furdić, M. Application of Unmanned Aerial Vehicles in Logistic Processes. In New Technologies, Development and Applications; Springer: Cham, Switzerland, 2018; pp. 359–366. [Google Scholar] [CrossRef]
- Skorput, P.; Mandzuka, S.; Vojvodic, H. The use of Unmanned Aerial Vehicles for forest fire monitoring. In Proceedings of the 2016 International Symposium ELMAR, Zadar, Croatia, 12–14 September 2016; pp. 93–96. [Google Scholar] [CrossRef]
- Larm, D. Expendable remotely piloted vehicles for strategic offensive airpower roles. In Air Univ Maxwell Afb al School of Advanced Airpower Studies; Air University Press: Montgomery, AL, USA, 1996. [Google Scholar]
- Bernauw, K. Drones: The emerging era of unmanned civil aviation. Zb. PFZ 2016, 66, 223. [Google Scholar]
- Yadav, A.; Goel, S.; Lohani, B.; Singh, S. A UAV Traffic Management System for India: Requirement and Preliminary Analysis. J. Indian Soc. Remote Sens. 2020, 49, 515–525. [Google Scholar] [CrossRef]
- Schroth, L. The Drone Market 2019–2024: 5 Things You Need to Know. Available online: https://droneii.com/the-drone-market-2019-2024-5-things-you-need-to-know (accessed on 15 May 2021).
- Scott, J.; Scott, C. Drone delivery models for healthcare. In Proceedings of the 50th Hawaii International Conference on System Sciences, Hilton Waikoloa Village, HI, USA, 4–7 January 2017. [Google Scholar]
- Castellano, F. Commercial Drones Are Revolutionizing Business Operations. Available online: https://www.toptal.com/finance/market-research-analysts/drone-market (accessed on 28 March 2019).
- Chan, K.W.; Nirmal, U.; Cheaw, W.G. Progress on drone technology and their applications: A comprehensive review. In AIP Conference Proceedings; AIP Publishing LLC.: Melville, NY, USA, 2018. [Google Scholar] [CrossRef]
- Afrin, T.; Yodo, N. An Evaluation on Current Traffic Congestion Measures. In IIE Annual Conference. Proceedings; Institute of Industrial and Systems Engineers (IISE): Peachtree Corners, GA, USA, 2020. [Google Scholar]
- Afrin, T.; Yodo, N. A probabilistic estimation of traffic congestion using Bayesian network. Measurement 2021, 174, 109051. [Google Scholar] [CrossRef]
- CISION. Drone Logistics and Transportation Market Size to Reach USD 10,990 Million by 2026 at CAGR 10.8%. Available online: https://www.prnewswire.com/in/news-releases/drone-logistics-and-transportation-market-size-to-reach-usd-10-990-million-by-2026-at-cagr-10-8-valuates-reports-857193310.html (accessed on 25 May 2021).
- Roca-Riu, M.; Menendez, M. Logistic deliveries with drones: State of the art of practice and research. In Proceedings of the 19th Swiss Transport Research Conference (STRC 2019), Ascona, Italy, 15–17 May 2019. [Google Scholar]
- Menouar, H.; Guvenc, I.; Akkaya, K.; Uluagac, A.S.; Kadri, A.; Tuncer, A. UAV-Enabled Intelligent Transportation Systems for the Smart City: Applications and Challenges. IEEE Commun. Mag. 2017, 55, 22–28. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E. UAV-assisted disaster management: Applications and open issues. In Proceedings of the 2016 international conference on computing, networking and communications (ICNC), Kauai, HI, USA, 15–18 February 2016; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Zhi, Y.; Fu, Z.; Sun, X.; Yu, J. Security and Privacy Issues of UAV: A Survey. Mob. Netw. Appl. 2019, 25, 95–101. [Google Scholar] [CrossRef]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV Cellular Communications: Practical Aspects, Standardization Advancements, Regulation, and Security Challenges. IEEE Commun. Surv. Tutorials 2019, 21, 3417–3442. [Google Scholar] [CrossRef] [Green Version]
- Brien, T.; Abrahamsen, H.B.; Zamarro, A.; Valls, M.; Badia, O.; Guasch, J.; Ioannidis, D.; Votis, K.; Palaskas, C.; Rogotis, S.; et al. Remote Piloted Airborne Systems (RPAS) and the Emergency Services; E.E.N. Association: Brussels, Belgium, 2015. [Google Scholar]
- Lee, C.; Kim, S.; Chu, B. A Survey: Flight Mechanism and Mechanical Structure of the UAV. Int. J. Precis. Eng. Manuf. 2021, 22, 1–25. [Google Scholar] [CrossRef]
- Puri, A. A Survey of Unmanned Aerial Vehicles (Uav) for Traffic Surveillance; Department of Computer Science and Engineering, University of South Florida: Tampa, FL, USA, 2005; pp. 1–29. [Google Scholar]
- Alzahrani, B.; Oubbati, O.S.; Barnawi, A.; Atiquzzaman, M.; Alghazzawi, D. UAV assistance paradigm: State-of-the-art in applications and challenges. J. Netw. Comput. Appl. 2020, 166, 102706. [Google Scholar] [CrossRef]
- Ozdemir, U.; Aktas, Y.O.; Vuruskan, A.; Dereli, Y.; Tarhan, A.F.; Demirbag, K.; Erdem, A.; Kalaycioglu, G.D.; Ozkol, I.; Inalhan, G. Design of a Commercial Hybrid VTOL UAV System. J. Intell. Robot. Syst. 2013, 74, 371–393. [Google Scholar] [CrossRef]
- Özbek, E.; Yalin, G.; Ekici, S.; Karakoc, T.H. Evaluation of design methodology, limitations, and iterations of a hydrogen fuelled hybrid fuel cell mini UAV. Energy 2020, 213, 118757. [Google Scholar] [CrossRef]
- Patrik, A.; Utama, G.; Gunawan, A.; Chowanda, A.; Suroso, J.S.; Shofiyanti, R.; Budiharto, W. GNSS-based navigation systems of autonomous drone for delivering items. J. Big Data 2019, 6, 53. [Google Scholar] [CrossRef] [Green Version]
- GPS.gov. Other Global Navigation Satellite Systems (GNSS). Available online: https://www.gps.gov/systems/gnss/ (accessed on 15 April 2021).
- Chen, H.; Wang, X.-M.; Li, Y. A survey of autonomous control for UAV. In Proceedings of the 2009 International Conference on Artificial Intelligence and Computational Intelligence, Shanghai, China, 7–8 November 2009. [Google Scholar]
- Haddal, R.; Hayden, N.K. Autonomous Systems Artificial Intelligence and Safeguards; Sandia National Lab. (SNL-NM): Albuquerque, NM, USA, 2018.
- Pastor, E.; Lopez, J.; Royo, P. UAV Payload and Mission Control Hardware/Software Architecture. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 3–8. [Google Scholar] [CrossRef]
- Zhao, Y.; Zheng, Z.; Liu, Y. Survey on computational-intelligence-based UAV path planning. Knowl.-Based Syst. 2018, 158, 54–64. [Google Scholar] [CrossRef]
- Han, M. Authentication and Encryption of Aerial Robotics Communication; San Jose State University: San Jose, CA, USA, 2019. [Google Scholar] [CrossRef]
- Koubaa, A.; Allouch, A.; Alajlan, M.; Javed, Y.; Belghith, A.; Khalgui, M. Micro Air Vehicle Link (MAVlink) in a Nutshell: A Survey. IEEE Access 2019, 7, 87658–87680. [Google Scholar] [CrossRef]
- Chung, S.-J.; Paranjape, A.A.; Dames, P.; Shen, S.; Kumar, V. A Survey on Aerial Swarm Robotics. IEEE Trans. Robot. 2018, 34, 837–855. [Google Scholar] [CrossRef] [Green Version]
- Skorobogatov, G.; Barrado, C.; Salamí, E. Multiple UAV Systems: A Survey. Unmanned Syst. 2020, 8, 149–169. [Google Scholar] [CrossRef]
- The Impact of Drones on Supply Chain Management. Available online: https://www.americanexpress.com/us/foreign-exchange/articles/drones-impact-supply-chain-management/ (accessed on 1 March 2021).
- Rodday, N. Hacking a Professional Drone. Black Hat Asia. 2016. Available online: https://www.blackhat.com/docs/asia-16/materials/asia-16-Rodday-Hacking-A-Professional-Drone.pdf (accessed on 6 August 2021).
- Sathyamoorthy, D. A review of security threats of unmanned aerial vehicles and mitigation steps. J. Def. Secur. 2015, 6, 81–97. [Google Scholar]
- Goethals, P.L.; Yodo, N. Insider Attack Metrics for Cybersecurity: Investigating Various Research Options. In IIE Annual Conference. Proceedings; Institute of Industrial and Systems Engineers (IISE): Peachtree Corners, GA, USA, 2019. [Google Scholar]
- Yodo., N.; Goethals, P.L. Cybersecurity Management via Control Strategies for Resilient Cyber-Physical Systems. In IIE Annual Conference. Proceedings; Institute of Industrial and Systems Engineers (IISE): Peachtree Corners, GA, USA, 2019. [Google Scholar]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the Current State of UAV Regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef] [Green Version]
- Zhou, G.; Ambrosia, V.; Gasiewski, A.J.; Bland, G. Foreword to the Special Issue on Unmanned Airborne Vehicle (UAV) Sensing Systems for Earth Observations. IEEE Trans. Geosci. Remote Sens. 2009, 47, 687–689. [Google Scholar] [CrossRef]
- Nex, F.C.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2013, 6, 1–15. [Google Scholar] [CrossRef]
- Chen, S.; Laefer, D.; Mangina, E. State of Technology Review of Civilian UAVs. Recent Pat. Eng. 2016, 10, 160–174. [Google Scholar] [CrossRef] [Green Version]
- Macrina, G.; Pugliese, L.D.P.; Guerriero, F.; Laporte, G. Drone-aided routing: A literature review. Transp. Res. Part C Emerg. Technol. 2020, 120, 102762. [Google Scholar] [CrossRef]
- Yang, T.; Li, Z.; Zhang, F.; Xie, B.; Li, J.; Liu, L. Panoramic UAV Surveillance and Recycling System Based on Structure-Free Camera Array. IEEE Access 2019, 7, 25763–25778. [Google Scholar] [CrossRef]
- Jung, S.; Jo, Y.; Kim, Y.-J. Flight Time Estimation for Continuous Surveillance Missions Using a Multirotor UAV. Energies 2019, 12, 867. [Google Scholar] [CrossRef] [Green Version]
- Kwak, J.; Park, J.H.; Sung, Y. Emerging ICT UAV applications and services: Design of surveillance UAVs. Int. J. Commun. Syst. 2019, 34. [Google Scholar] [CrossRef]
- Dwivedi, V.S.; Patrikar, J.; Addamane, A.; Ghosh, A. MARAAL: A Low Altitude Long Endurance Solar Powered UAV For Surveillance and Mapping Applications. In Proceedings of the 2018 23rd International Conference on Methods & Models in Automation & Robotics (MMAR), Międzyzdroje, Poland, 27–30 August 2018; pp. 449–454. [Google Scholar] [CrossRef]
- Erenoglu, R.C.; Erenoglu, O.; Arslan, N. Accuracy Assessment of Low Cost UAV Based City Modelling for Urban Planning. Teh. Vjesn.-Tech. Gaz. 2018, 25, 1708–1714. [Google Scholar] [CrossRef]
- Latha, T.P.; Sundari, K.N.; Cherukuri, S.; Prasad, M.V.V.S.V. Remote sensing uav/drone technology as a tool for urban development measures in apcrda. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 525–529. [Google Scholar] [CrossRef] [Green Version]
- Tokarczyk, P.; Leitao, J.P.; Rieckermann, J.; Schindler, K.; Blumensaat, F. High-quality observation of surface imperviousness for urban runoff modelling using UAV imagery. Hydrol. Earth Syst. Sci. 2015, 19, 4215–4228. [Google Scholar] [CrossRef] [Green Version]
- Esrafilian, O.; Gesbert, D. 3D City Map Reconstruction from UAV-Based Radio Measurements. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Kedzierski, M.; Fryskowska, A.; Wierzbicki, D.; Nerc, P. Chosen aspects of the production of the basic map using UAV imagery. The International Archives of Photogrammetry. Remote Sens. Spat. Inf. Sci. 2016, 41, 873. [Google Scholar]
- Elloumi, M.; Dhaou, R.; Escrig, B.; Idoudi, H.; Saidane, L.A. Monitoring road traffic with a UAV-based system. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018. [Google Scholar]
- Khan, M.A.; Ectors, W.; Bellemans, T.; Janssens, D.; Wets, G. UAV-Based Traffic Analysis: A Universal Guiding Framework Based on Literature Survey. Transp. Res. Procedia 2017, 22, 541–550. [Google Scholar] [CrossRef]
- Khan, N.A.; Jhanjhi, N.; Brohi, S.N.; Usmani, R.S.A.; Nayyar, A. Smart traffic monitoring system using Unmanned Aerial Vehicles (UAVs). Comput. Commun. 2020, 157, 434–443. [Google Scholar] [CrossRef]
- Barmpounakis, E.; Geroliminis, N. On the new era of urban traffic monitoring with massive drone data: The pNEUMA large-scale field experiment. Transp. Res. Part C Emerg. Technol. 2019, 111, 50–71. [Google Scholar] [CrossRef]
- Beg, A.; Qureshi, A.R.; Sheltami, T.; Yasar, A. UAV-enabled intelligent traffic policing and emergency response handling system for the smart city. Pers. Ubiquitous Comput. 2020, 25, 33–50. [Google Scholar] [CrossRef]
- Themistocleous, K.; Neocleous, K.; Pilakoutas, K.; Hadjimitsis, D.G. Damage assessment using advanced non-intrusive inspection methods: Integration of space, UAV, GPR, and field spectroscopy. In Proceedings of the Second International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2014), Paphos, Cyprus, 7–10 April 2014. [Google Scholar]
- Knyaz, V.; Chibunichev, A. Photogrammetric techniques for road surface analysis. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2016, 41, 515–520. [Google Scholar] [CrossRef] [Green Version]
- Brooks, C.; Dobson, R.J.; Banach, D.M.; Roussi, C.; Lefler, V.; Hart, B.; Garbarino, J.; Lawrence, A.; White, B.; Aden, S.; et al. Characterization of Unpaved Road Condition through the Use of Remote Sensing Project-Phase II, Deliverable 8-D; Michigan Tech Transportation Institute: Ann Arbor, MI, USA, 2016. [Google Scholar]
- Congress, S.S.; Puppala, A.J.; Lundberg, C.L. Total system error analysis of UAV-CRP technology for monitoring transportation infrastructure assets. Eng. Geol. 2018, 247, 104–116. [Google Scholar] [CrossRef]
- Iglesias, L.; De Santos-Berbel, C.; Pascual, V.; Castro, M. Using Small Unmanned Aerial Vehicle in 3D Modeling of Highways with Tree-Covered Roadsides to Estimate Sight Distance. Remote Sens. 2019, 11, 2625. [Google Scholar] [CrossRef] [Green Version]
- Guérin, F.; Guinand, F.; Brethé, J.F.; Pelvillain, H. Towards an autonomous warehouse inventory scheme. In Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence (SSCI), Honolulu, HI, USA, 6–9 December 2016. [Google Scholar]
- Fernández-Caramés, T.M.; Blanco-Novoa, O.; Froiz-Míguez, I.; Fraga-Lamas, P. Towards an Autonomous Industry 4.0 Warehouse: A UAV and Blockchain-Based System for Inventory and Traceability Applications in Big Data-Driven Supply Chain Management. Sensors 2019, 19, 2394. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bae, S.M.; Han, K.H.; Cha, C.N.; Lee, H.Y. Development of Inventory Checking System Based on UAV and RFID in Open Storage Yard. In Proceedings of the 2016 International Conference on Information Science and Security (ICISS), Bangalore, India, 16–20 December 2016; pp. 1–2. [Google Scholar] [CrossRef]
- Moshref-Javadi, M.; Lee, S.; Winkenbach, M. Design and evaluation of a multi-trip delivery model with truck and drones. Transp. Res. Part E Logist. Transp. Rev. 2020, 136, 101887. [Google Scholar] [CrossRef]
- Yakushiji, K.; Fujita, H.; Murata, M.; Hiroi, N.; Hamabe, Y.; Yakushiji, F. Short-Range Transportation Using Unmanned Aerial Vehicles (UAVs) during Disasters in Japan. Drones 2020, 4, 68. [Google Scholar] [CrossRef]
- Aljehani, M.; Inoue, M. Performance Evaluation of Multi-UAV System in Post-Disaster Application: Validated by HITL Simulator. IEEE Access 2019, 7, 64386–64400. [Google Scholar] [CrossRef]
- Mayor, V.; Estepa, R.; Estepa, A.; Madinabeitia, G. Deploying a Reliable UAV-Aided Communication Service in Disaster Areas. Wirel. Commun. Mob. Comput. 2019, 2019, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Deruyck, M.; Wyckmans, J.; Joseph, W.; Martens, L. Designing UAV-aided emergency networks for large-scale disaster scenarios. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 79. [Google Scholar] [CrossRef] [Green Version]
- Marsh. Drones-a View into the Future for the Logistics Sector; Marsh: London, UK, 2015. [Google Scholar]
- Sharma, V.; You, I.; Pau, G.; Collotta, M.; Lim, J.D.; Kim, J.N. LoRaWAN-based energy-efficient surveillance by drones for intelligent transportation systems. Energies 2018, 11, 573. [Google Scholar] [CrossRef] [Green Version]
- Tseng, Y.; Yue, W.L.; Taylor, M. The role of transportation in logistics chain. Proc. East. Asia Soc. Transp. Stud. 2005, 5, 1657–1672. [Google Scholar]
- Yoo, W.; Yu, E.; Jung, J. Drone delivery: Factors affecting the public’s attitude and intention to adopt. Telemat. Inform. 2018, 35, 1687–1700. [Google Scholar] [CrossRef]
- Raffo, V.G.; Almeida, M.M.D. A load transportation nonlinear control strategy using a tilt-rotor uav. J. Adv. Transp. 2018, 2018. [Google Scholar] [CrossRef]
- Pizetta, I.H.B.; Brandao, A.S.; Sarcinelli-Filho, M. Control and Obstacle Avoidance for an UAV Carrying a Load in Forestal Environments. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Center Dallas, TX, USA, 12–15 June 2018; pp. 62–67. [Google Scholar] [CrossRef]
- Hegde, A.; Ghose, D. Multi-UAV Distributed Control for Load Transportation in Precision Agriculture. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- GISGeography. 100 Earth Shattering Remote Sensing Applications & Uses. Available online: https://gisgeography.com/remote-sensing-applications/ (accessed on 11 August 2021).
- Noor, N.M.; Abdullah, A.; Hashim, M. Remote sensing UAV/drones and its applications for urban areas: A review. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2018. [Google Scholar] [CrossRef]
- Barmpounakis, N.E.; Vlahogianni, E.I.; Golias, J.C. Extracting Kinematic Characteristics from Unmanned Aerial Vehicles. In Proceedings of the Transportation Research Board 95th Annual Meeting, Washington, DC, USA, 10–14 January 2016. [Google Scholar]
- Kanistras, K.; Martins, G.; Rutherford, M.J.; Valavanis, K.P. A survey of unmanned aerial vehicles (UAVs) for traffic monitoring. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013. [Google Scholar]
- Barmpounakis, E.N.; Vlahogianni, E.I.; Golias, J.C. Unmanned Aerial Aircraft Systems for transportation engineering: Current practice and future challenges. Int. J. Transp. Sci. Technol. 2016, 5, 111–122. [Google Scholar] [CrossRef]
- Ghazzai, H.; Menouar, H.; Kadri, A. On the Placement of UAV Docking Stations for Future Intelligent Transportation Systems. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference, Sydney, Australia, 4–7 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Ghazzai, H.; Menouar, H.; Kadri, A.; Massoud, Y. Future UAV-Based ITS: A Comprehensive Scheduling Framework. IEEE Access 2019, 7, 75678–75695. [Google Scholar] [CrossRef]
- Lucic, M.C.; Ghazzai, H.; Massoud, Y. A Generalized Dynamic Planning Framework for Green UAV-Assisted Intelligent Transportation System Infrastructure. IEEE Syst. J. 2020, 14, 4786–4797. [Google Scholar] [CrossRef]
- Ahmed, S.; Chowdhury, M.Z.; Jang, Y.M. Energy-Efficient UAV-to-User Scheduling to Maximize Throughput in Wireless Networks. IEEE Access 2020, 8, 21215–21225. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Lakas, A.; Lagraa, N.; Yagoubi, M.B. UVAR: An intersection UAV-assisted VANET routing protocol. In Proceedings of the 2016 IEEE Wireless Communications And Networking Conference, Doha, Qatar, 3–6 April 2016. [Google Scholar]
- Jingnan, L.; Pengfei, L.; Kai, L. Research on UAV communication network topology based on small world network model. In Proceedings of the 2017 IEEE International Conference on Unmanned Systems (ICUS), Miami, FL USA, 13–16 June 2017; pp. 444–447. [Google Scholar] [CrossRef]
- Fatemidokht, H.; Rafsanjani, M.K.; Gupta, B.B.; Hsu, C.-H. Efficient and Secure Routing Protocol Based on Artificial Intelligence Algorithms With UAV-Assisted for Vehicular Ad Hoc Networks in Intelligent Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4757–4769. [Google Scholar] [CrossRef]
- Li, X.; Tan, J.; Liu, A.; Vijayakumar, P.; Kumar, N.; Alazab, M. A Novel UAV-Enabled Data Collection Scheme for Intelligent Transportation System Through UAV Speed Control. IEEE Trans. Intell. Transp. Syst. 2020, 22, 2100–2110. [Google Scholar] [CrossRef]
- Zhao, N.; Lu, W.; Sheng, M.; Chen, Y.; Tang, J.; Yu, F.R.; Wong, K.-K. UAV-Assisted Emergency Networks in Disasters. IEEE Wirel. Commun. 2019, 26, 45–51. [Google Scholar] [CrossRef] [Green Version]
- Khan, S.I.; Qadir, Z.; Munawar, H.S.; Nayak, S.R.; Budati, A.K.; Verma, K.; Prakash, D. UAVs path planning architecture for effective medical emergency response in future networks. Phys. Commun. 2021, 47, 101337. [Google Scholar] [CrossRef]
- Hildmann, H.; Kovacs, E. Review: Using Unmanned Aerial Vehicles (UAVs) as Mobile Sensing Platforms (MSPs) for Disaster Response, Civil Security and Public Safety. Drones 2019, 3, 59. [Google Scholar] [CrossRef] [Green Version]
- Gamba, M.T.; Ugazio, S.; Marucco, G.; Pini, M.; Presti, L.L. Light weight GNSS-based passive radar for remote sensing UAV applications. In Proceedings of the 2015 IEEE 1st International Forum on Research and Technologies for Society and Industry Leveraging a Better Tomorrow (RTSI), Turin, Italy, 16–18 September 2015. [Google Scholar]
- American Red Cross; MEASURE. Drones for Disaster Response and Relief Operations. 2015. Available online: https://www.issuelab.org/resources/21683/21683.pdf (accessed on 11 August 2021).
- Garnica-Peña, R.J.; Alcántara-Ayala, I. The use of UAVs for landslide disaster risk research and disaster risk management: A literature review. J. Mt. Sci. 2021, 18, 482–498. [Google Scholar] [CrossRef]
- Huang, Y.; Yi, S.; Li, Z.; Shao, S.; Qin, X. Design of highway landslide warning and emergency response systems based on UAV. In Proceedings of the Remote Sensing of the Environment: The 17th China Conference on Remote Sensing, Hangzhou, China, 27–31 August 2010. [Google Scholar]
- Beesley, C. Surveying with Drones—Saving Governments Time and Money without Sacrificing Accuracy; govdesignhub. Available online: https://govdesignhub.com/2020/02/20/how-surveying-with-drones-can-save-governments-time-and-money/ (accessed on 11 August 2021).
- Wall, R. 8 Ways Drones Are Lowering the Cost of Infrastructure Inspection; Power Engineering: Anaheim, CA, USA, 2019. [Google Scholar]
- DJI. DJI Counts More than 500 People Rescued by Drones around The World. Available online: https://www.dji.com/newsroom/news/dji-counts-more-than-500-people-rescued-by-drones-around-the-world (accessed on 11 August 2021).
- Brar, S.; Rabbat, R.; Raithatha, V.; Runcie, G.; Yu, A. Drones for Deliveries; University of California: Berkeley, CA, USA, 2015. [Google Scholar]
- Boukoberine, N.M.; Zhou, Z.; Benbouzid, M. Power supply architectures for drones—A review. In Proceedings of the IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019. [Google Scholar]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Sah, B.; Gupta, R.; Bani-Hani, D. Analysis of barriers to implement drone logistics. Int. J. Logist. Res. Appl. 2020, 1–20. [Google Scholar] [CrossRef]
- Azmat, M.; Kummer, S. Potential applications of unmanned ground and aerial vehicles to mitigate challenges of transport and logistics-related critical success factors in the humanitarian supply chain. Asian J. Sustain. Soc. Responsib. 2020, 5, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Hardin, P.J.; Lulla, V.; Jensen, R.R.; Jensen, J.R. Small Unmanned Aerial Systems (sUAS) for environmental remote sensing: Challenges and opportunities revisited. GIScience Remote Sens. 2018, 56, 309–322. [Google Scholar] [CrossRef]
- Rumba, R.; Nikitenko, A. The wild west of drones: A review on autonomous—UAV traffic-management. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2020; pp. 1317–1322. [Google Scholar] [CrossRef]
- Urban Air Mobility and Advanced Air Mobility. 2020. Available online: https://www.faa.gov/uas/advanced_operations/urban_air_mobility/ (accessed on 15 June 2021).
- Lin, C.E.; Chen, T.-P.; Shao, P.-C.; Lai, Y.-C.; Chen, T.-C.; Yeh, Y.-C. Prototype Hierarchical UAS Traffic Management System in Taiwan. In Proceedings of the 2019 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 9–11 April 2019; pp. 1–13. [Google Scholar] [CrossRef]
- Park, H.J.; Choi, S.-C.; Ahn, I.-Y. Structure Design for Unmanned Aircraft Traffic Management System. In Proceedings of the 2019 Eleventh International Conference on Ubiquitous and Future Networks (ICUFN), Zagreb, Croatia, 2–5 July 2019. [Google Scholar]
- Yang, L.; Zhang, X.; Xiangmin, G. Framework Design of Unmanned Aerial Systems (UAS) Integration in the National Airspace System (NAS). In Proceedings of the 2018 13th World Congress on Intelligent Control and Automation (WCICA), Changsha China, 4–8 July 2018. [Google Scholar]
- Lundberg, J.; Palmerius, K.L.; Josefsson, B. Urban air traffic management (UTM) implementation in cities-sampled side-effects. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018; pp. 1–7. [Google Scholar] [CrossRef]
- McCarthy, T.; Pforte, L.; Burke, R. Fundamental Elements of an Urban UTM. Aerospace 2020, 7, 85. [Google Scholar] [CrossRef]
- Drone Traffic Management; Korea Institute of Aviation Safety Technology: Incheon, Korea, 2021.
- Afrin, T.; Yodo, N. A Survey of Road Traffic Congestion Measures towards a Sustainable and Resilient Transportation System. Sustainability 2020, 12, 4660. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight Mechanism * | Rotary-Wing | Fixed-Wing | Hybrid |
|---|---|---|---|
| Mass (kg) | 0.01 to 100 | 0.1 to 400,000 | 1.5 to 65 |
| Payload (kg) | 0 To 50 | 0 to 1000 | 0 to 10 |
| Ceiling altitude (km) | 4 | 0.1 to 30 | n/a |
| Endurance (min) | 6 to 180 | 60 to 3000 | 180 to 480 |
| Range (km) | 0.05 to 200 | 2 to 20 mil | n/a |
| Energy source | Battery | Fuel or Battery | Fuel or Battery |
| References | Application | UAV Type/Model | Contribution/Findings |
|---|---|---|---|
| Yang et al. (2019) [44] | Surveillance | Parrot Bebop, DJI Matrix 100, DJI Phantom 2 | Proposed panoramic UAV surveillance and recycling system for autonomous UAV recycling. |
| Jung et al. (2019) [45] | Surveillance | Multi-rotor type solar-powered UAV | Developed a photovoltaic power management system for continuous surveillance and estimated the UAV flight times using the state of charge estimation technique. |
| Kwak et al. (2021) [46] | Surveillance | - | Proposed a method for autonomous UAV surveillance and developed a framework based on flight records for precise control of UAVs in a complex environment. |
| Dwivedi et al. (2018) [47] | Surveillance, Urban Planning | Low-Altitude Long-Endurance fixed-wing UAV | Detailed design and fabrication of solar-powered UAVs for continuous surveillance operations were explained. |
| Erenoglu et al. (2018) [48] | Urban Planning | Mikrocopter Octocopter XL 8 multi-rotor UAV | Demonstrated a methodology to design a 3-D city model using the information provided by UAV imagery. |
| Latha et al. (2019) [49] | Urban Planning | Vehicle DJI Phantom 4 Pro | Presented a technical procedure for 3-D urban mapping using UAVs. |
| Tokarczyk et al. (2015) [50] | Urban Planning | Fixed-wing consumer micro-UAV | Demonstrated that urban drainage models with a high degree of spatial detail could be obtained via UAV imagery. |
| Esrafilian and Gesbert (2017) [51] | Urban Planning | - | Proposed a method for 3-D city map reconstruction using radio measurements made from UAVs flying at low altitudes and predicted the optimal UAV altitude. |
| Kedzierski et al. (2016) [52] | Urban Planning | Trimble UX-5 | Presented an assessment of ortho-images based on UAV imagery to upgrade basic maps, which resulted in a reduction of the processing time by 40%. |
| Elloumi et al. (2018) [53] | Traffic Monitoring | - | Proposed road traffic monitoring system using multiple UAVs, with better performance than fixed UAV trajectory in terms of coverage rates and events detection rates. |
| Khan et al. (2017) [54] | Traffic Monitoring | - | Provided a framework for safe and efficient study of road traffic using UAVs by outlining all necessary hardware and software entities. |
| Khan et al. (2020) [55] | Traffic Monitoring | - | Proposed a smart traffic monitoring system using UAVs with 5G technology |
| Barmpounakis and Geroliminis (2020) [56] | Traffic Monitoring | Quadcopter DJI UAVs—Phantom 4 Advanced | Recorded traffic streams over a real-life urban setting using UAVs to investigate critical traffic phenomena. |
| Beg et al. (2021) [57] | Traffic Monitoring, Emergency Response | - | Proposed an intelligent autonomous UAV-enabled solution for the limitations of traffic policing and emergency response systems. |
| Themistocleous et al. (2014) [58] | Road Maintenance and Safety | - | Presented an approach for surveying road conditions by the integration of non-invasive remote sensing techniques with UAVs. |
| Knyaz and Chibunichev (2016) [59] | Road Maintenance and Safety | Geoscan 401 | Presented photogrammetric techniques for road surface analysis using a UAV for obtaining road imagery. |
| Brooks et al. (2016) [60] | Road Maintenance and Safety | Fixed-wing (Sensefly eBee), Bergen Hexacopter UAV | Conducted an experimental study in which the performance of a fixed-wing UAV was compared to that of a multi-rotor UAV for condition assessment of unpaved roads. |
| Congress et al. (2018) [61] | Road Maintenance and Safety | Aibotix Hexacopter UAV | Proposed and evaluated technology for infrastructure condition monitoring using UAVs. The data obtained could be used to identify distress features in infrastructure like permanent deformation and cracking patterns. |
| Iglesias et al. (2019) [62] | Road Maintenance and Safety | Quadcopter (Phantom 4 PRO UAV) | Presented a methodology to analyze the sight distance on highways for increasing highway safety, using UAV for data collection. |
| Guérin et al. (2016) [63] | Warehouse Inventory Management | Multi-rotor UAV | Presented an autonomous warehouse inventory management scheme with the cooperation of ground vehicles and UAVs. |
| Fernández-Caramés et al. (2019) [64] | Warehouse Inventory Management | Hexacopter UAV | Described the design and testing of UAVs using RFIDs for scanning warehouse inventory and using blockchain to receive inventory data. |
| Bae et al. (2016) [65] | Warehouse Inventory Management | DJI Phantom 2 Vision | Proposed a method to investigate inventory in an outdoor storage yard using RFIDs. |
| Javadi et al. (2020) [66] | UAV Delivery | - | Proposed a cooperative truck and UAV delivery system which combined UAVs with truck-based delivery operations with the end goal of minimizing the cumulative waiting times of customers. |
| Yakushiji et al. (2020) [67] | UAV Delivery, Disaster Management | M1000 | UAVs could effectively provide emergency supplies (food, medicine, etc.) during disaster scenarios. |
| Aljehani et al. (2019) [68] | Disaster Management | - | Simulated mapping of disaster-struck areas by multiple UAVs, in which the flight plan design was based on UAV performance data and disaster area features. |
| Mayor et al. (2019) [69] | Disaster Management, Search and Rescue | - | Proposed a method to provide a reliable Wi-Fi communication service with a minimal number of UAVs. |
| Deruyck et al. (2018) [70] | Disaster Management | Multi-rotor UAV | Demonstrated that UAVs could effectively provide emergency cellular communication networks in disaster scenarios. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gupta, A.; Afrin, T.; Scully, E.; Yodo, N. Advances of UAVs toward Future Transportation: The State-of-the-Art, Challenges, and Opportunities. Future Transp. 2021, 1, 326-350. https://doi.org/10.3390/futuretransp1020019
Gupta A, Afrin T, Scully E, Yodo N. Advances of UAVs toward Future Transportation: The State-of-the-Art, Challenges, and Opportunities. Future Transportation. 2021; 1(2):326-350. https://doi.org/10.3390/futuretransp1020019
Chicago/Turabian StyleGupta, Anunay, Tanzina Afrin, Evan Scully, and Nita Yodo. 2021. "Advances of UAVs toward Future Transportation: The State-of-the-Art, Challenges, and Opportunities" Future Transportation 1, no. 2: 326-350. https://doi.org/10.3390/futuretransp1020019