


Study on the Prediction of Slope Failure and Early Warning Thresholds Based on Model Tests

Abstract
:1. Introduction
2. Current State of Early Warning Systems
2.1. Proposed Method
2.2. Warning Criteria for Slope Failure
3. Laboratory Experiment
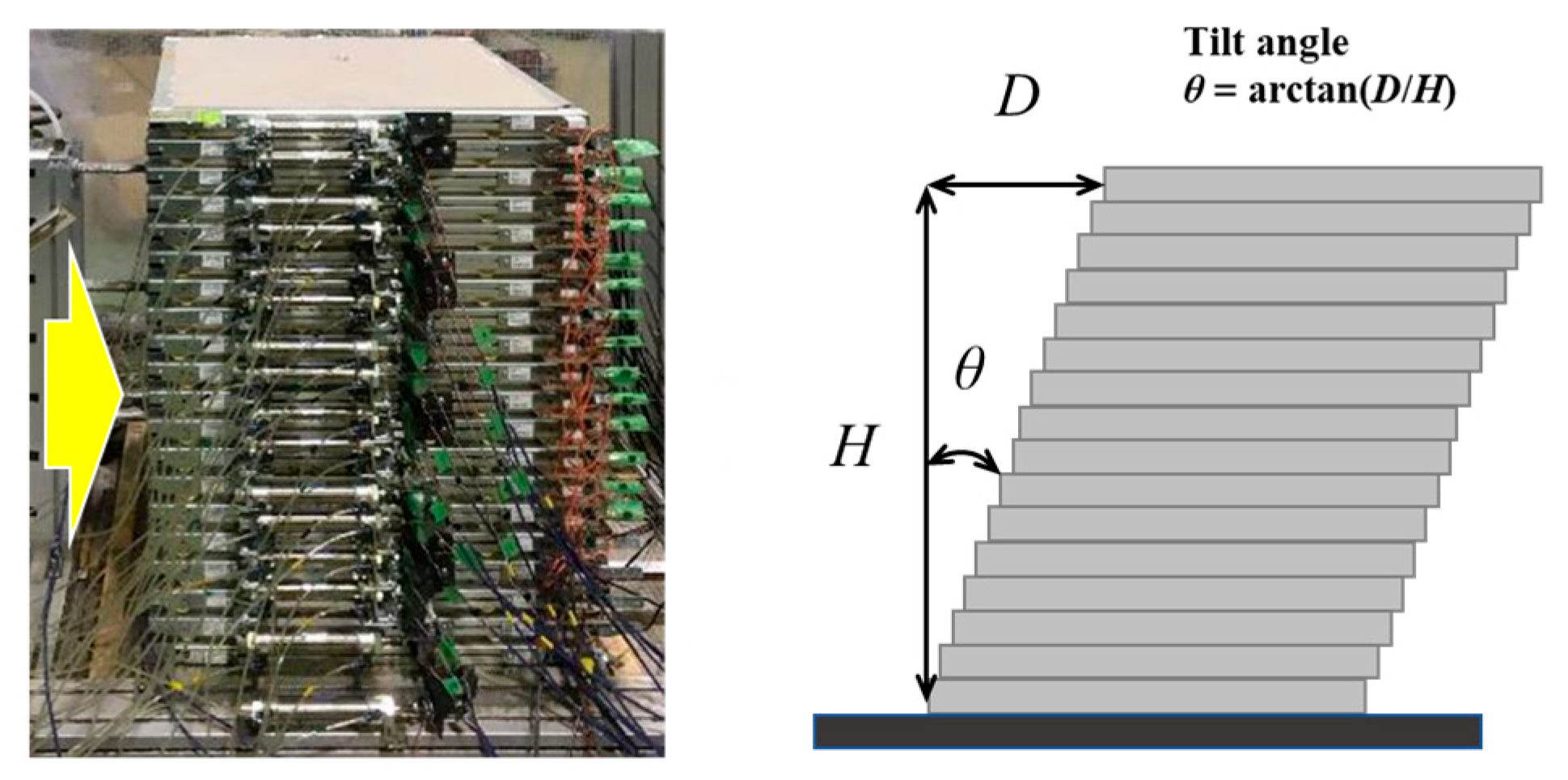
3.1. Laboratory Experiment Apparatus
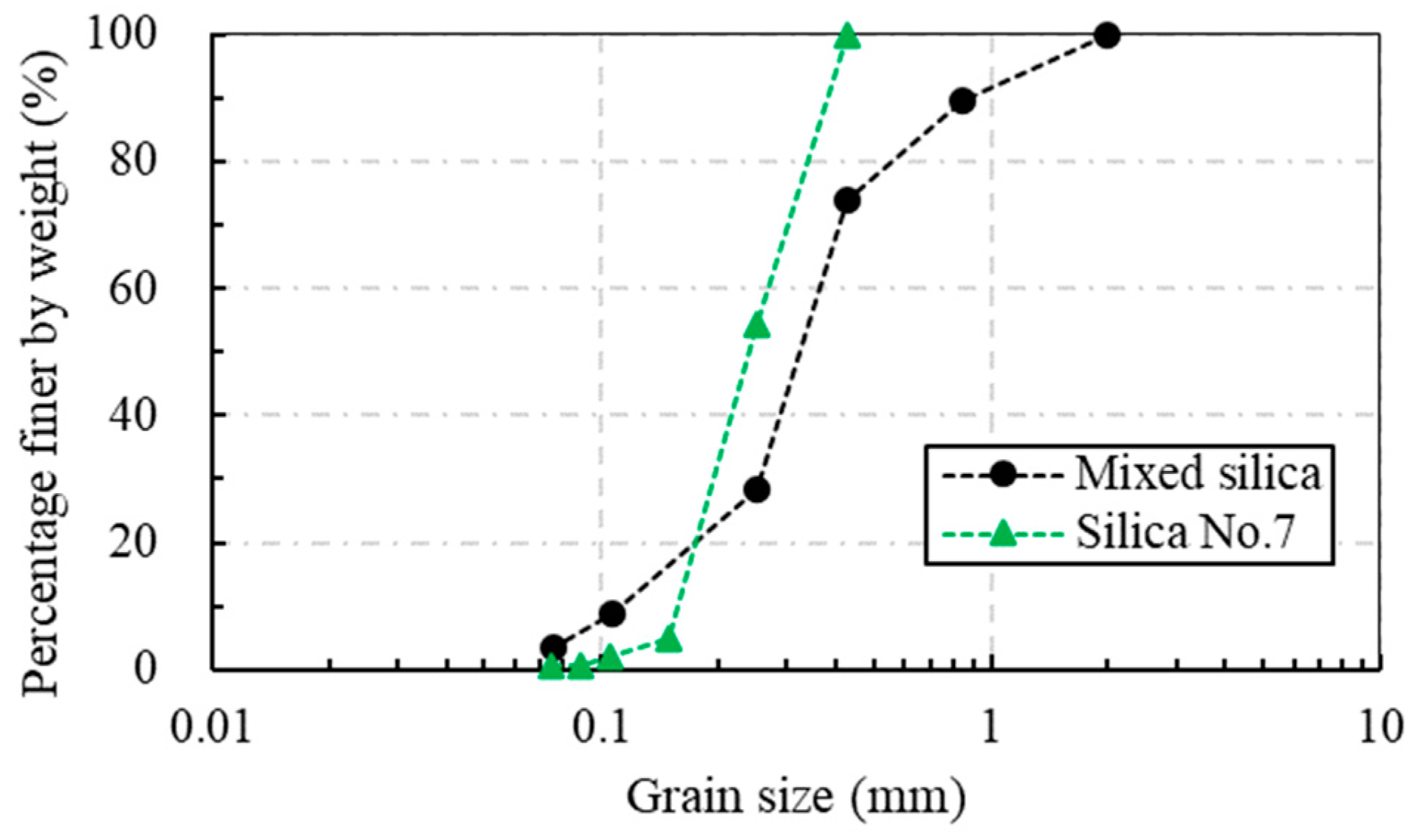
3.2. Soil Characterization
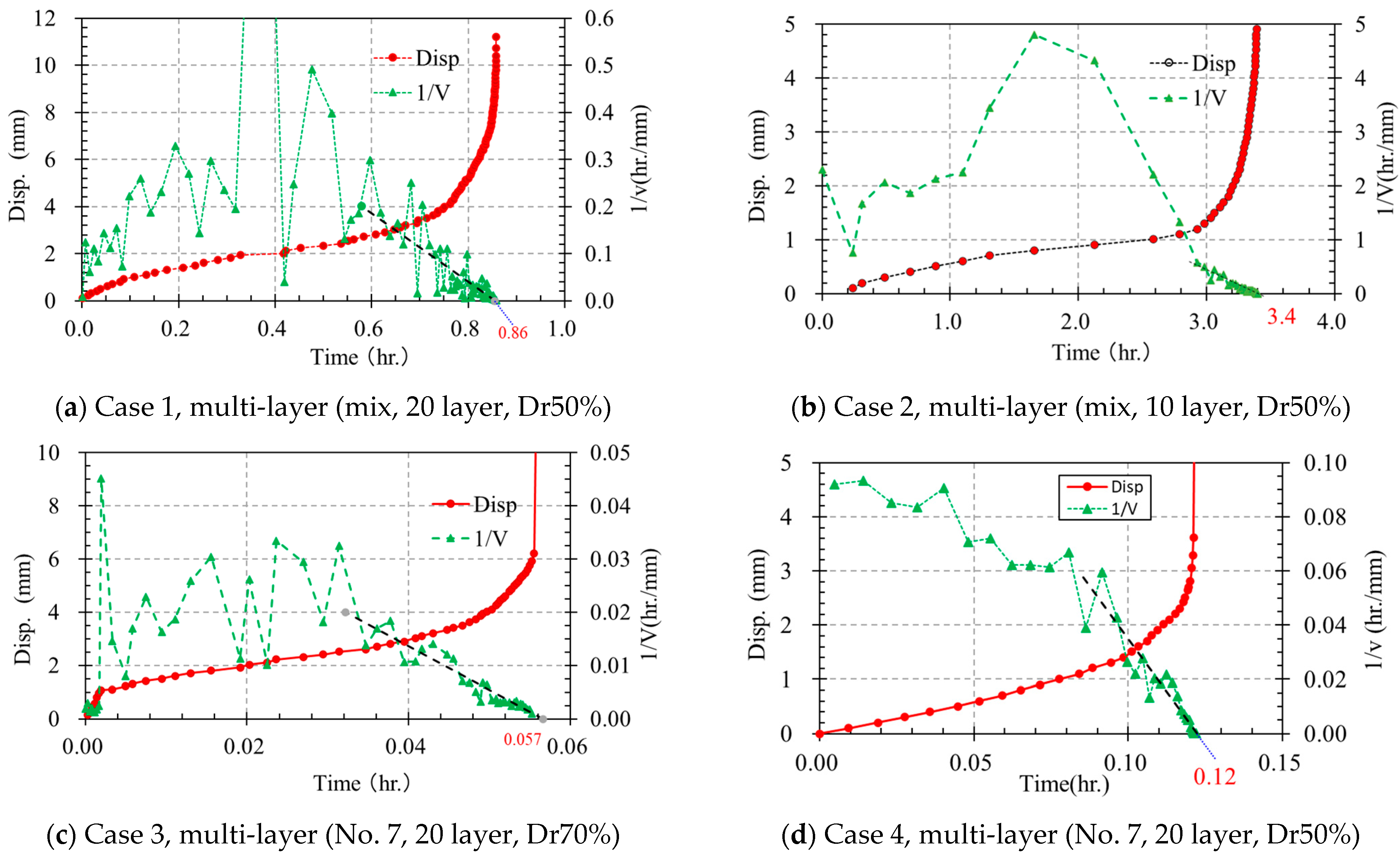
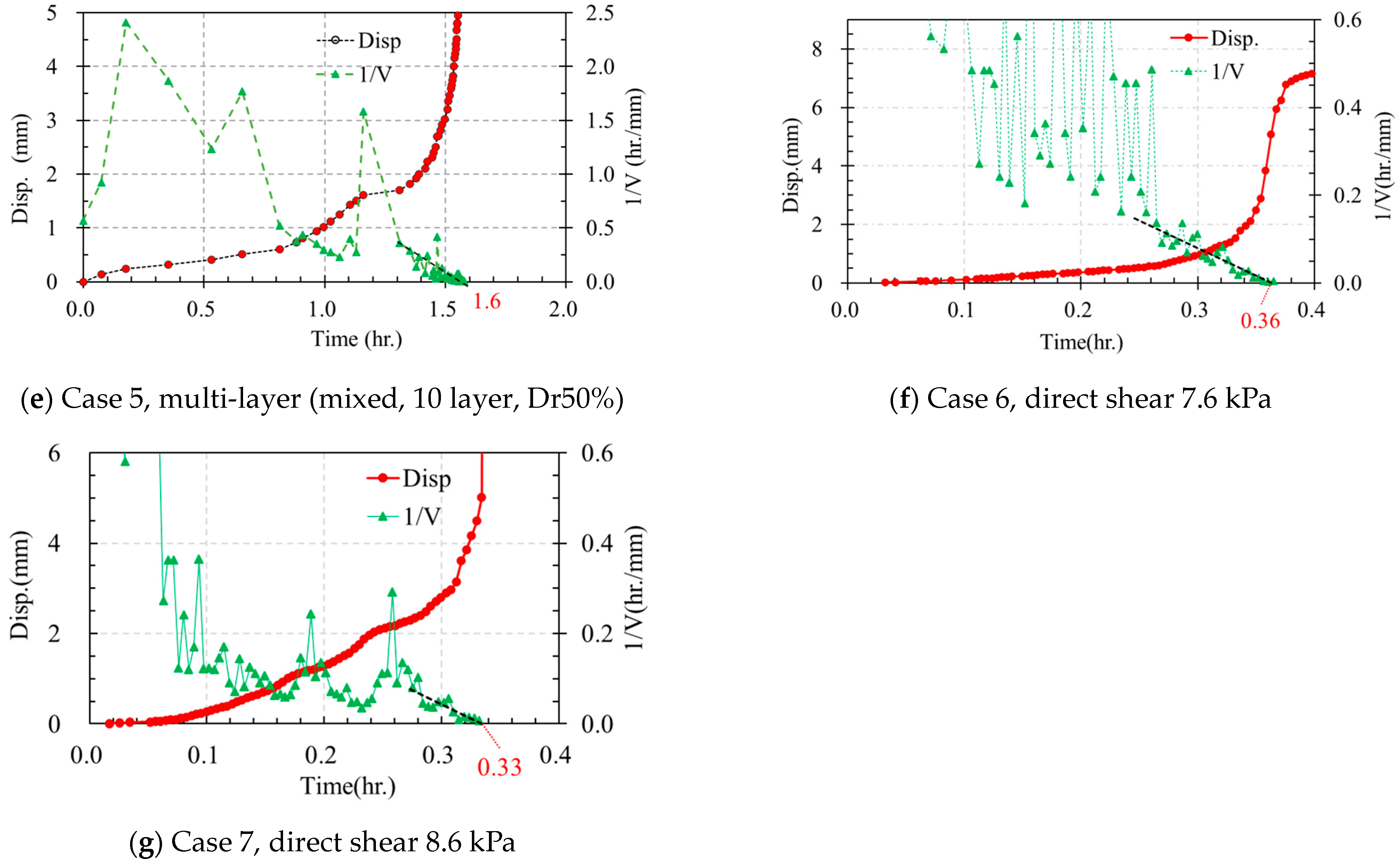
3.3. Experimental Cases
3.4. Experimental Results
3.5. Verification Using Indoor Experiment Results
4. Field Monitoring
4.1. Site A—Case on the Slope Beside the National Highway
4.2. Site B—Case on the Slope Beside the National Highway
5. Discussion
6. Conclusions
- (1)
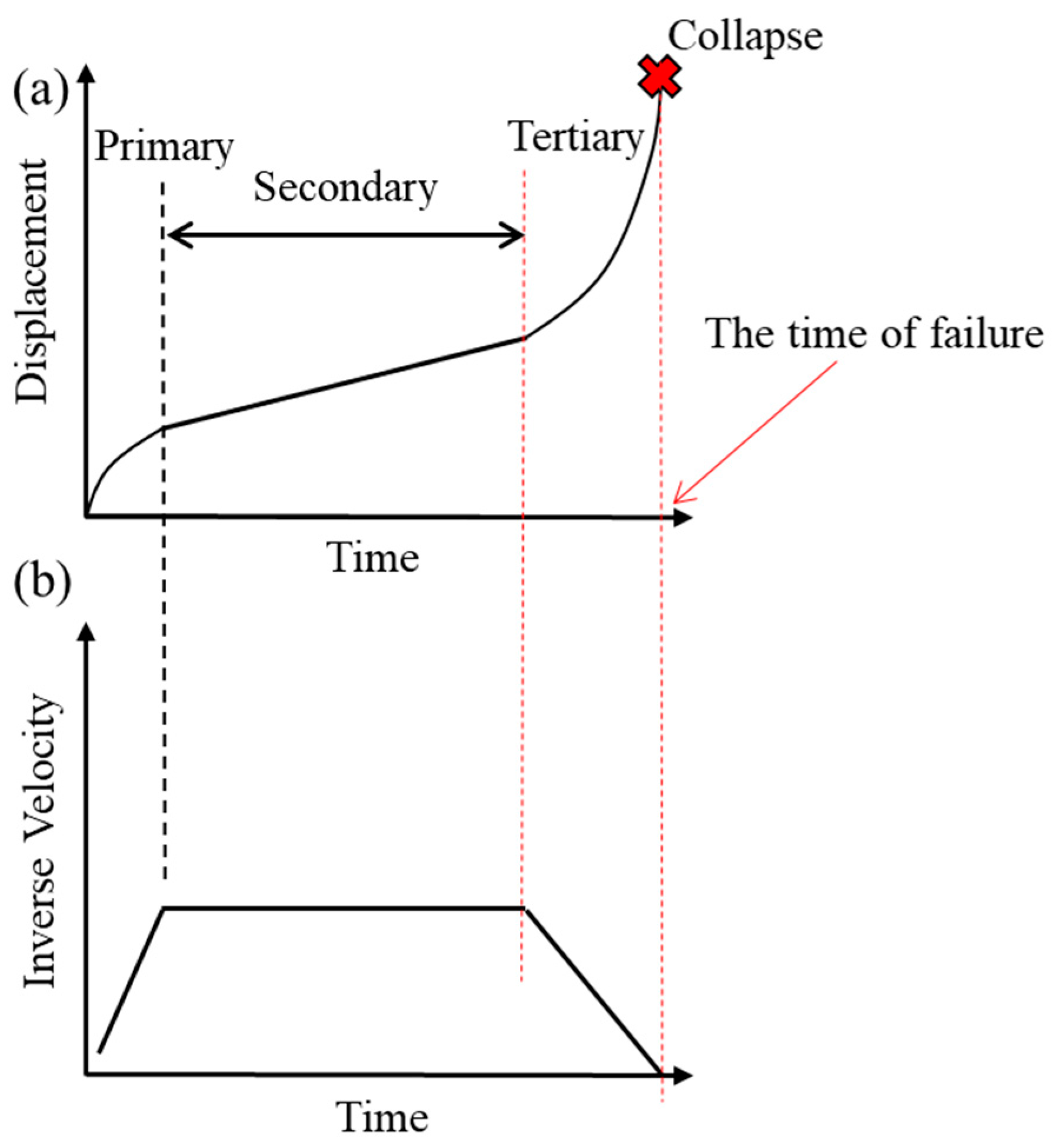
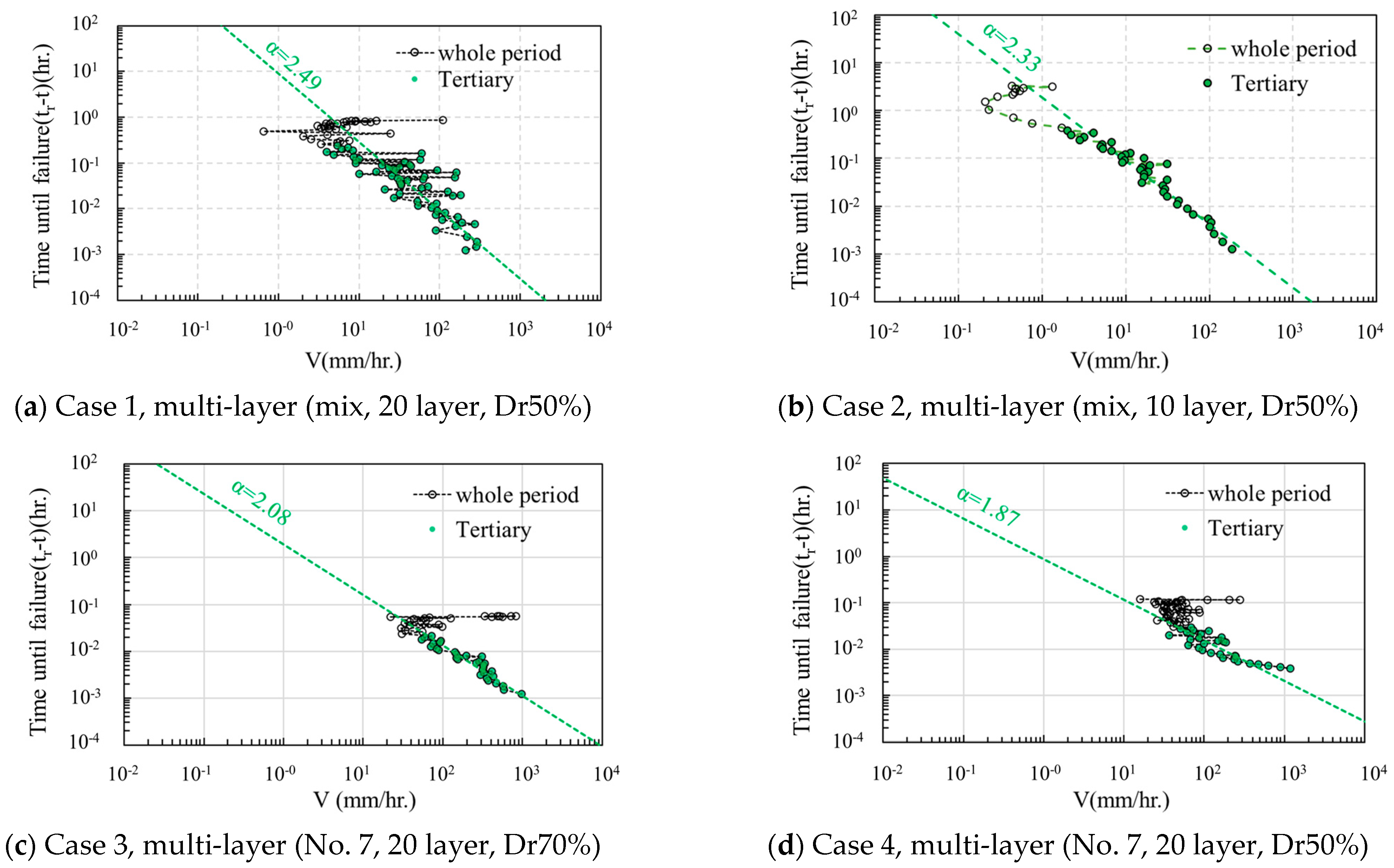
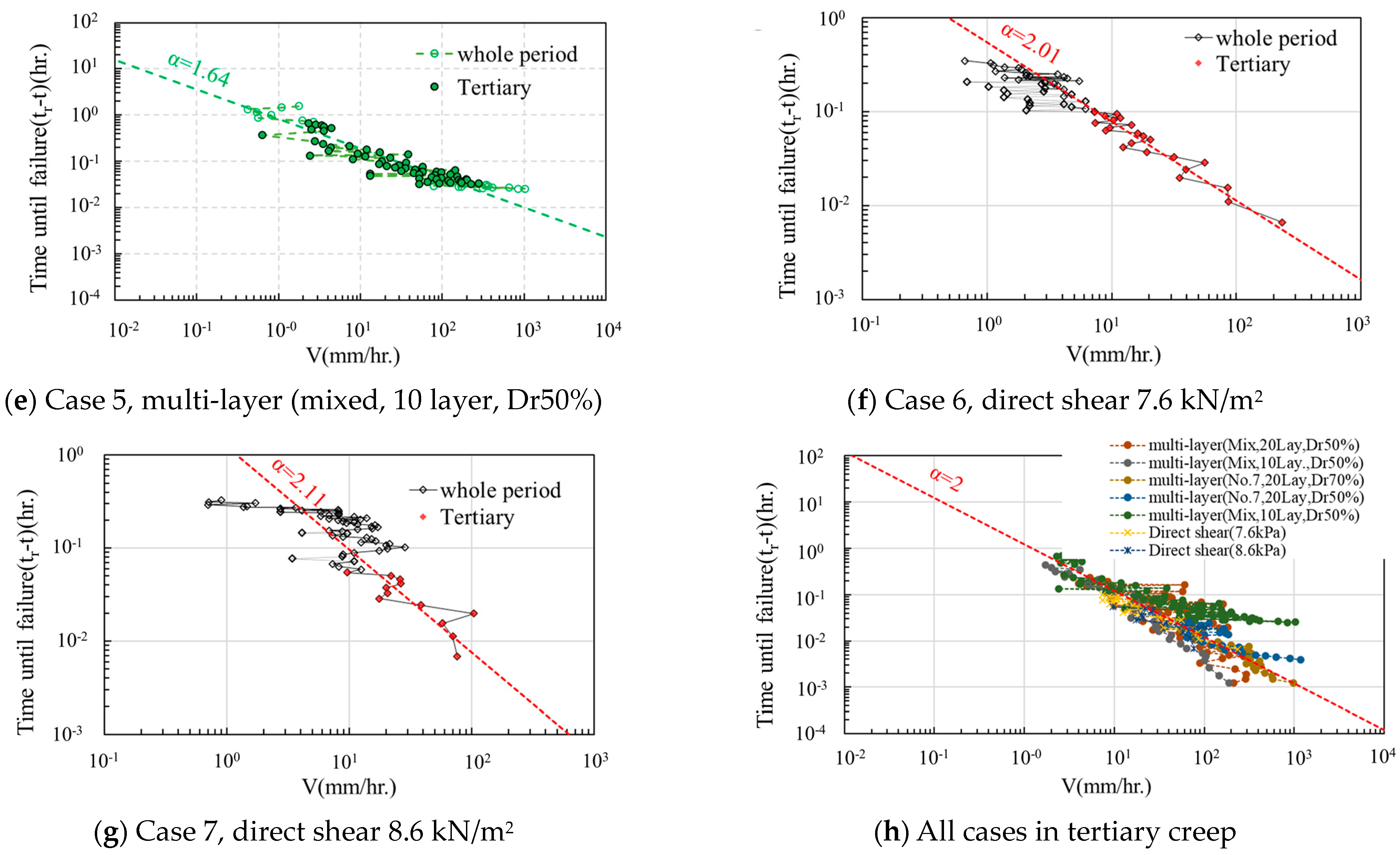
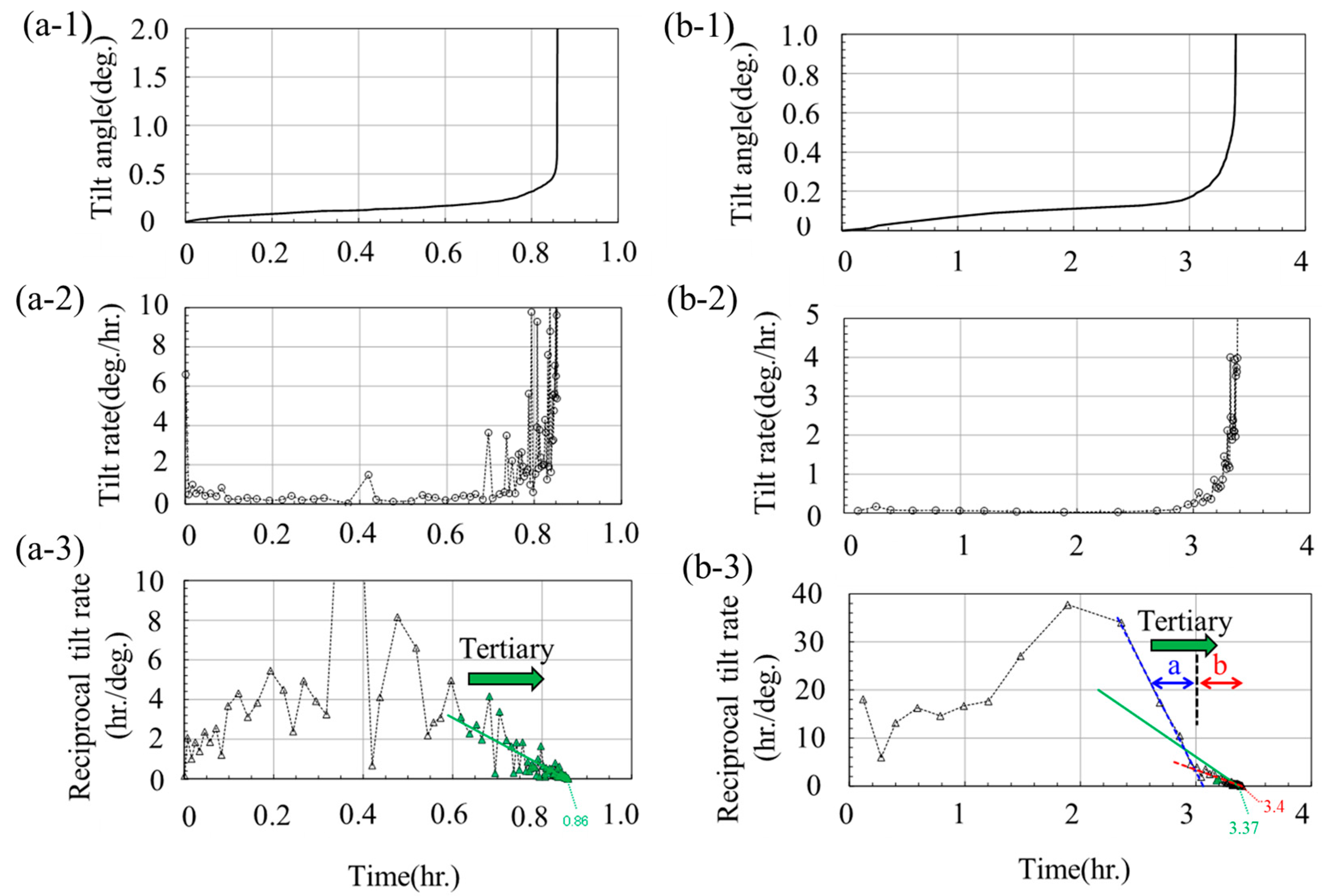
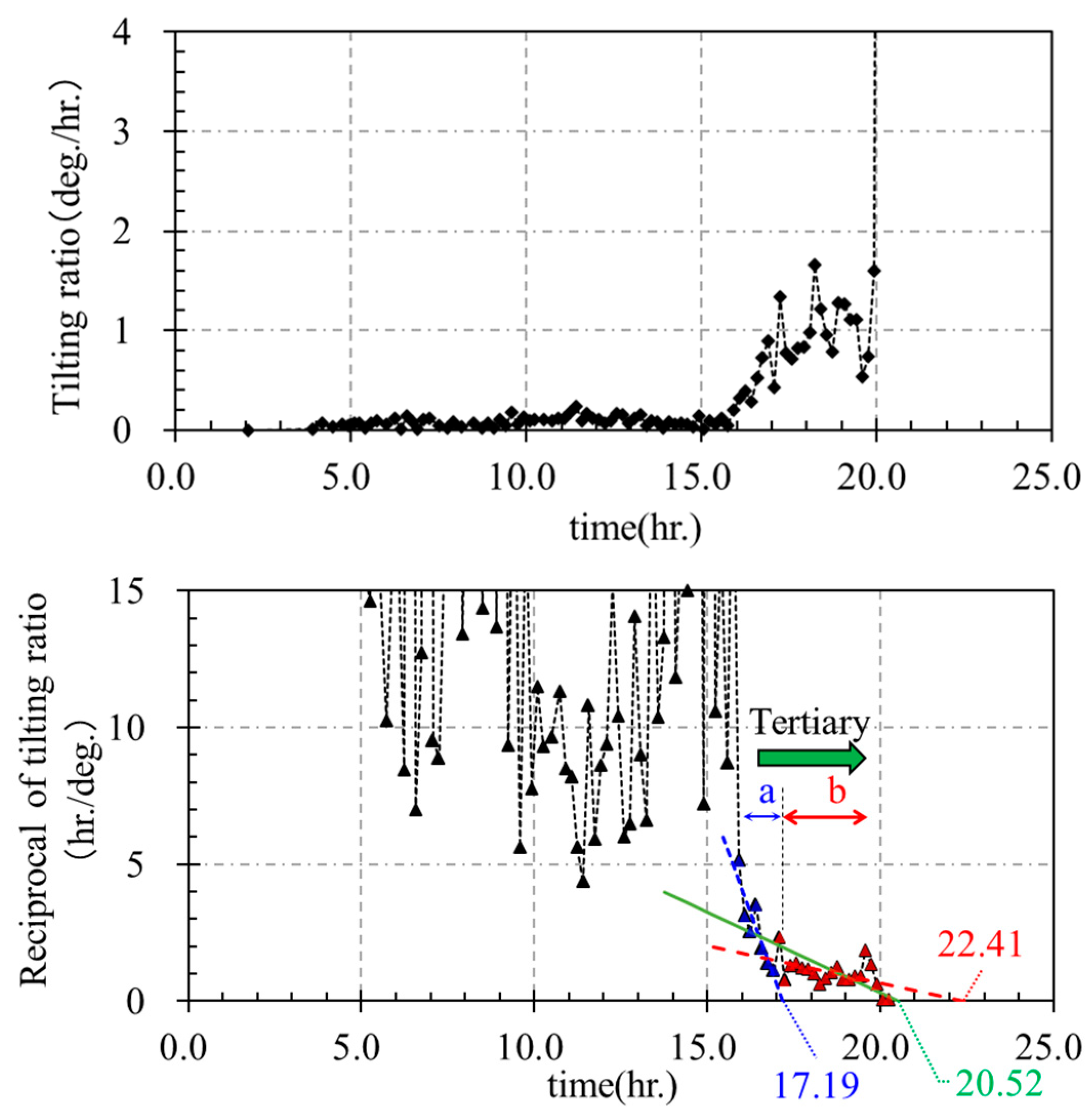
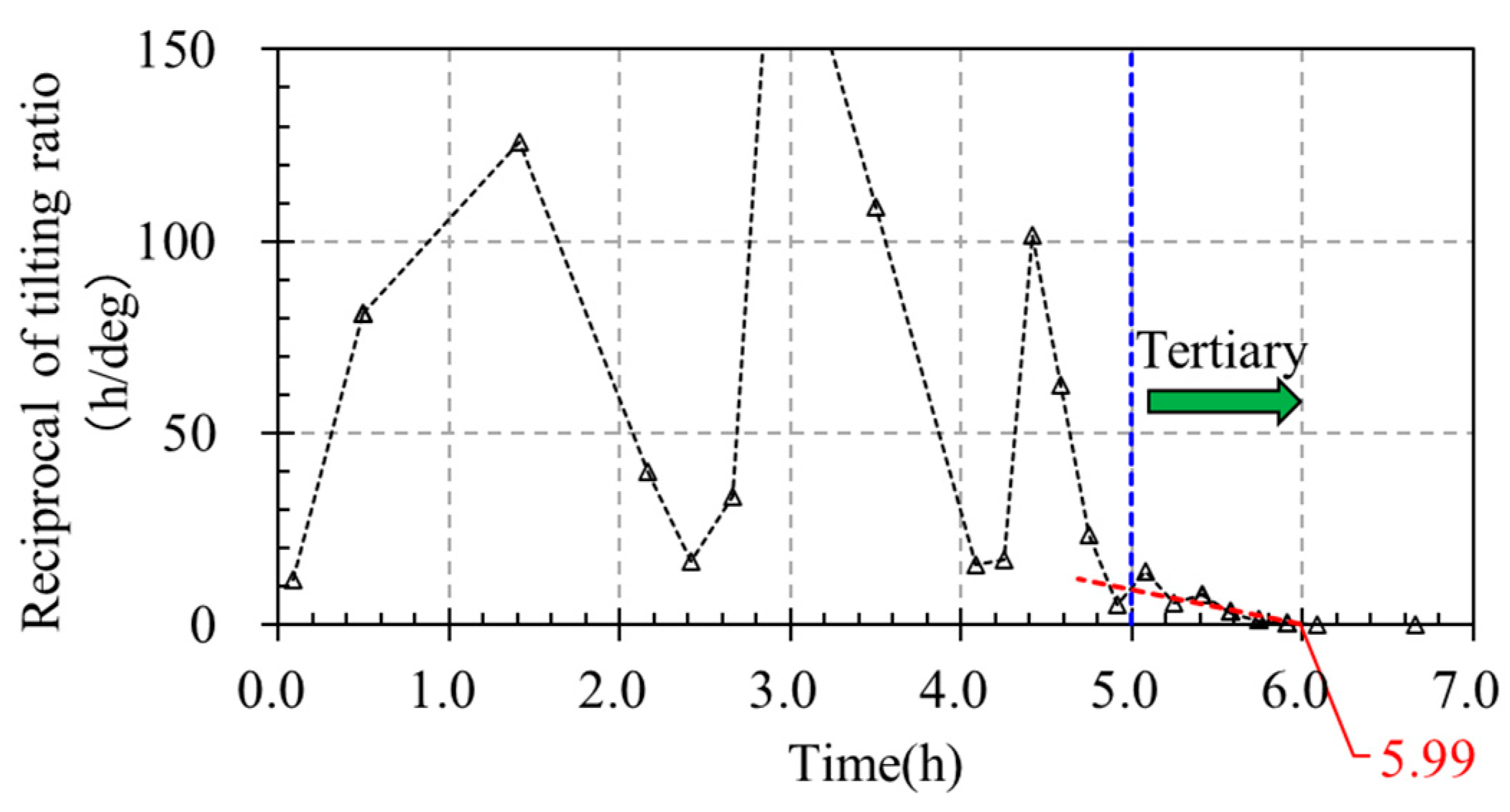
- In the tertiary state of creep, the relationship between the velocity of the tilt angle and the time until failure can be expressed as an inverse proportional relationship. This means that as the time until failure decreases, the velocity increases proportionally.
- (2)
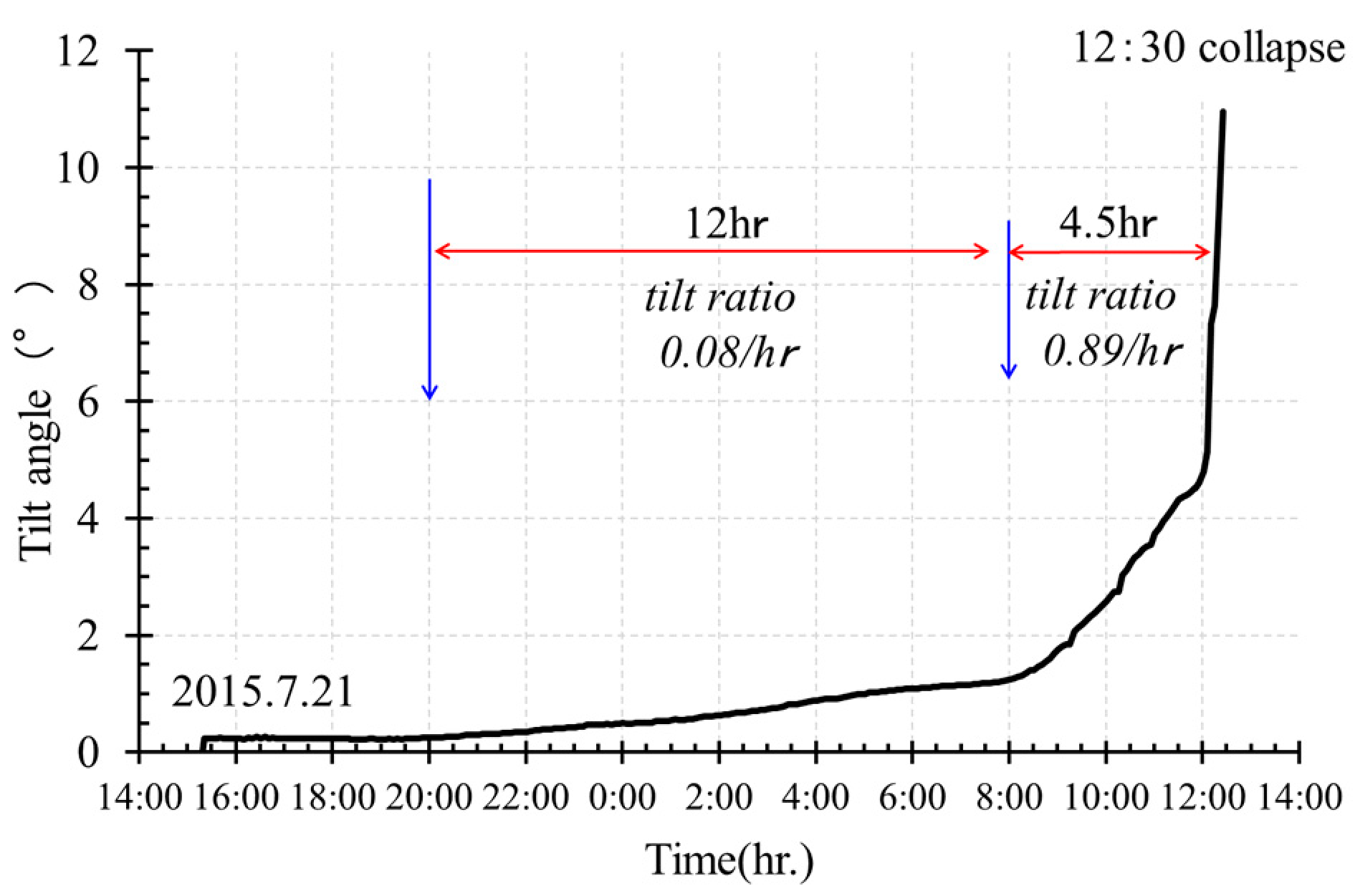
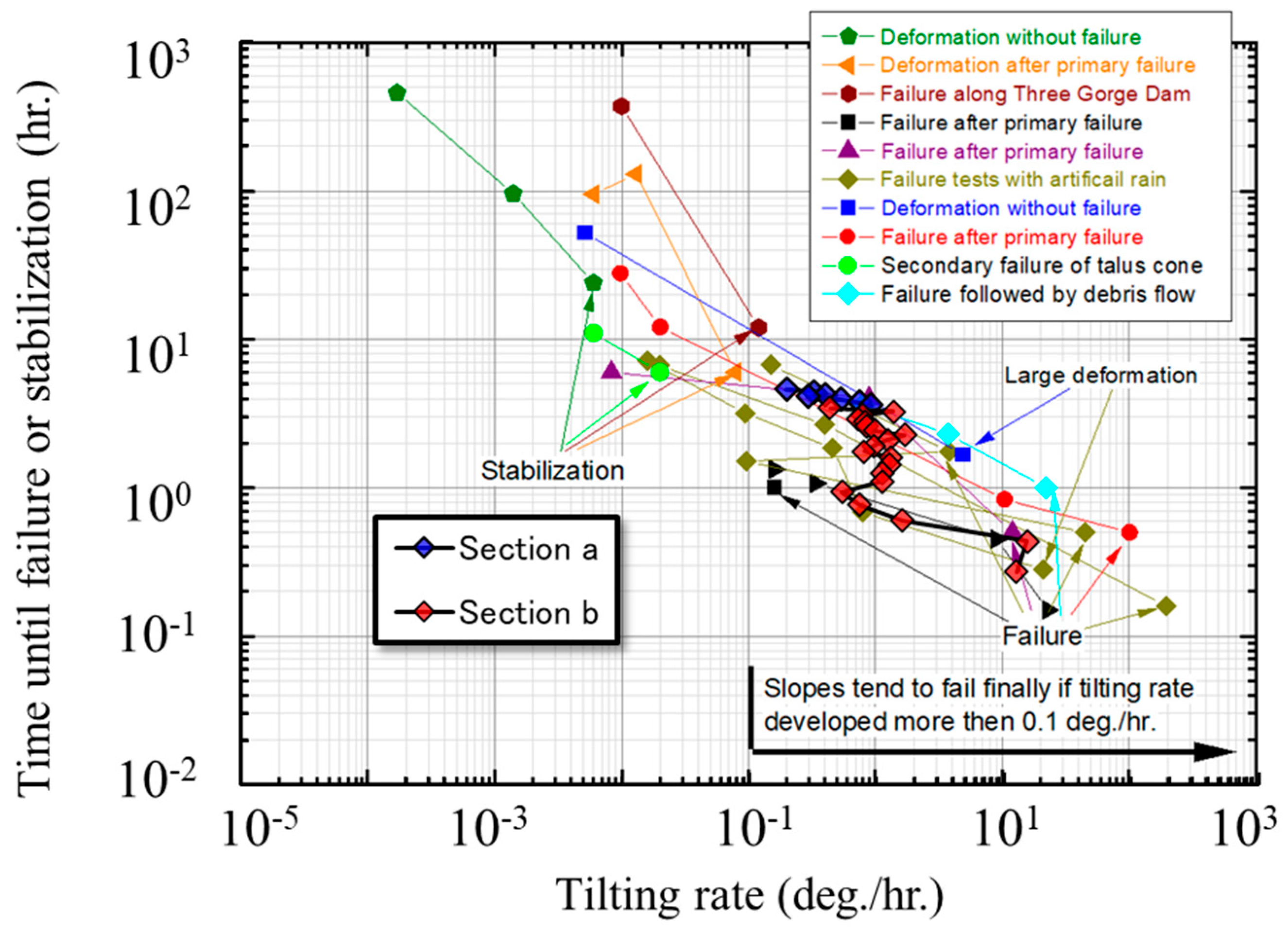
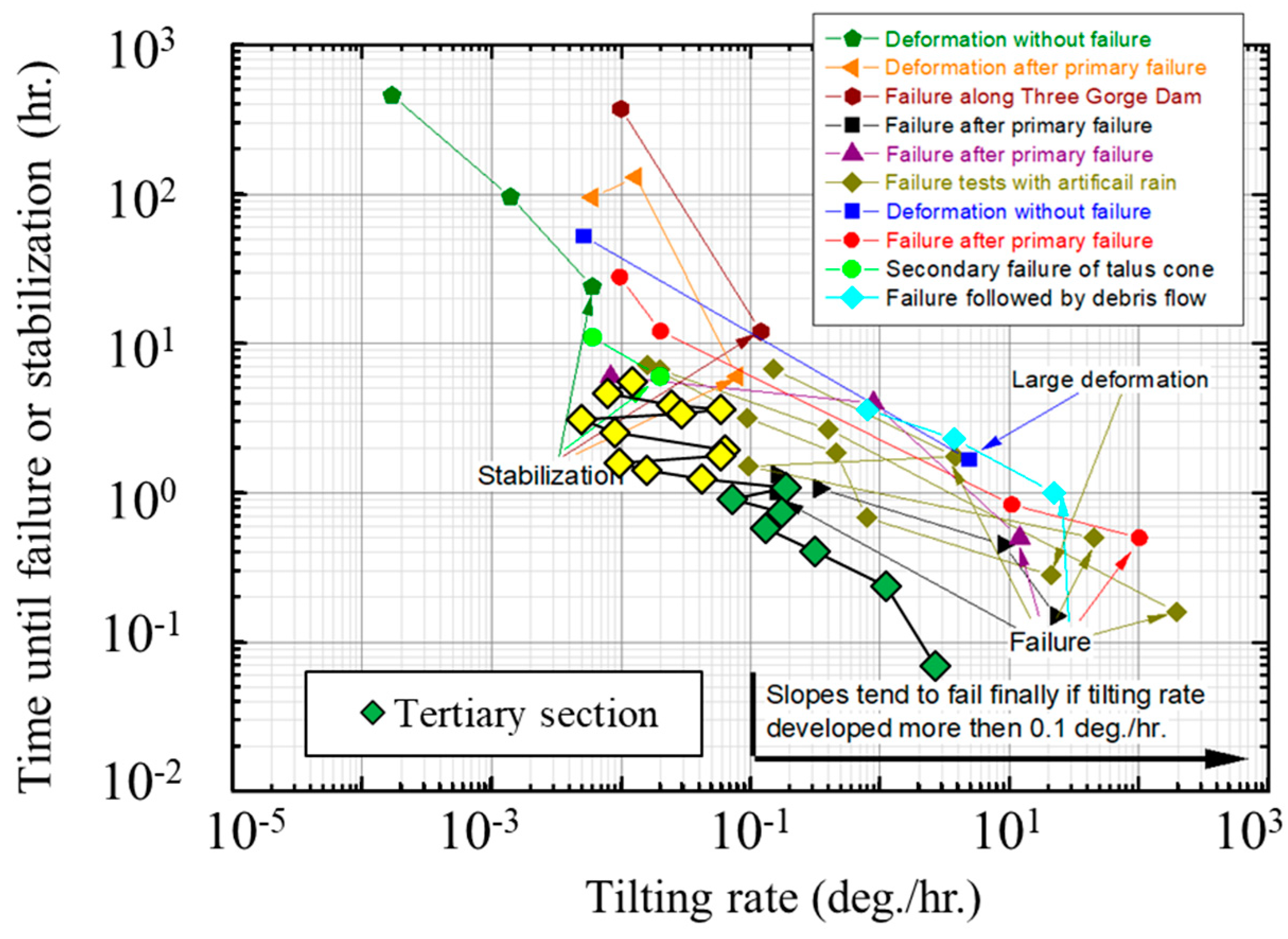
- When the velocity of the tilt angle reaches the tertiary creep stage, ranging from 0.01°/h to 0.1°/h, an alert message can be sent. If it exceeds 0.1°/h, a warning message can be sent. This two-stage warning threshold is a reasonable value and can serve as a guideline for an early warning threshold.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mirus, B.B.; Jones, E.S.; Baum, R.L.; Godt, J.W.; Slaughter, S.; Crawford, M.M.; Lancaster, J.; Stanley, T.; Kirschbaum, D.B.; Burns, W.J.; et al. Landslides across the USA: Occurrence, Susceptibility, and Data Limitations. Landslides 2020, 17, 2271–2285. [Google Scholar] [CrossRef]
- Pozzobon, M.; da Silveira, C.T.; Curcio, G.R. Landslides Susceptibility Analysis in Blumenau, Southern Brazil: A Probabilistic Approach. Int. J. Eros. Control Eng. 2019, 11, 63–72. [Google Scholar] [CrossRef]
- Haque, U.; Blum, P.; da Silva, P.F.; Andersen, P.; Pilz, J.; Chalov, S.R.; Malet, J.P.; Auflič, M.J.; Andres, N.; Poyiadji, E.; et al. Fatal Landslides in Europe. Landslides 2016, 13, 1545–1554. [Google Scholar] [CrossRef]
- Peruccacci, S.; Brunetti, M.T.; Gariano, S.L.; Melillo, M.; Rossi, M.; Guzzetti, F. Rainfall Thresholds for Possible Landslide Occurrence in Italy. Geomorphology 2017, 290, 39–57. [Google Scholar] [CrossRef]
- Runqiu, H. Some Catastrophic Landslides since the Twentieth Century in the Southwest of China. Landslides 2009, 6, 69–81. [Google Scholar] [CrossRef]
- Yamagishi, H.; Shimura, K.; Kurata, T. Landslides along the Coast from Ainuma to Toyohama, Southwestern Hokkaido, Japan. Landslides 1995, 31, 23–29. [Google Scholar] [CrossRef] [PubMed]
- Onodera, T.; Yoshinaka, R.; Kazama, H. Slope Failures Caused by Heavy Rainfall in Japan. J. Jpn. Soc. Eng. Geol. 1974, 15, 191–200. [Google Scholar] [CrossRef]
- Campbell, R.H. Soil Slips, Debris Flows, and Rainstorms in the Santa Monica Mountains and Vicinity, Southern California; US Government Printing Office: Washington, DC, USA, 1975; 51p. [Google Scholar]
- Caine, N. The Rainfall Intensity: Duration Control of Shallow Landslides and Debris Flows. Geogr. Ann. Ser. A, Phys. Geogr. 1980, 62, 23–27. [Google Scholar]
- Baum, R.L.; Godt, J.W. Early Warning of Rainfall-Induced Shallow Landslides and Debris Flows in the USA. Landslides 2010, 7, 259–272. [Google Scholar] [CrossRef]
- Segalini, A.; Valletta, A.; Carri, A. Landslide Time-of-Failure Forecast and Alert Threshold Assessment: A Generalized Criterion. Eng. Geol. 2018, 245, 72–80. [Google Scholar] [CrossRef]
- Saito, M. Failure of Soil Due to Creep. In Proceedings of the 5th International Conference SMFE, Paris, France, 17–22 July 1961; Volume 1, pp. 315–318. [Google Scholar]
- Saito, M. Forecasting the Time of Occurrence of a Slope Failure. In Proceedings of the 6th International Conference on Soil Mechanics and Foundation Engineering, Montreal, Canada, 8–15 September 1965; pp. 537–541. [Google Scholar]
- Saito, M. Forecasting Time of Slope Failure by Tertiary Creep. In Proceedings of the 7th International Conference on Soil Mechanics and Foundation Engineering, Mexico City, Mexico, 25–29 August 1969; pp. 677–683. [Google Scholar]
- Fukuzono, T. A Method to Predict the Time of Slope Failure Caused by Rainfall Using the Inverse Number of Velocity of Surface Displacement. Landslides 1985, 22, 8–13_1. [Google Scholar] [CrossRef] [PubMed]
- Uchimura, T.; Towhata, I.; Anh, T.T.L.; Fukuda, J.; Bautista, C.J.B.; Wang, L.; Seko, I.; Uchida, T.; Matsuoka, A.; Ito, Y.; et al. Simple Monitoring Method for Precaution of Landslides Watching Tilting and Water Contents on Slopes Surface. Landslides 2010, 7, 351–357. [Google Scholar] [CrossRef]
- Crosetto, M.; Copons, R.; Cuevas-González, M.; Devanthéry, N.; Monserrat, O. Monitoring Soil Creep Landsliding in an Urban Area Using Persistent Scatterer Interferometry (El Papiol, Catalonia, Spain). Landslides 2018, 15, 1317–1329. [Google Scholar] [CrossRef]
- Casagli, N.; Catani, F.; Del Ventisette, C.; Luzi, G. Monitoring, Prediction, and Early Warning Using Ground-Based Radar Interferometry. Landslides 2010, 7, 291–301. [Google Scholar] [CrossRef]
- Massonnet, D.; Feigl, K.L. Radar Interferometry and Its Application to Changes in the Earth’s Surface. Rev. Geophys. 1998, 36, 441–500. [Google Scholar] [CrossRef]
- Kromer, R.A.; Hutchinson, D.J.; Lato, M.J.; Gauthier, D.; Edwards, T. Identifying Rock Slope Failure Precursors Using LiDAR for Transportation Corridor Hazard Management. Eng. Geol. 2015, 195, 93–103. [Google Scholar] [CrossRef]
- Malet, J.P.; Maquaire, O.; Calais, E. The Use of Global Positioning System Techniques for the Continuous Monitoring of Landslides: Application to the Super-Sauze Earthflow (Alpes-de-Haute-Provence, France). Geomorphology 2002, 43, 33–54. [Google Scholar] [CrossRef]
- Monkman, F. An Empirical Relationship between Rupture Life and Minimum Creep Rate in Creep-Rupture Tests. Proc. ASTM 1956, 56, 593–620. [Google Scholar]
- Tao, S.; Uchimura, T.; Fukuhara, M.; Tang, J.; Chen, Y.; Huang, D. Evaluation of Soil Moisture and Shear Deformation Based on Compression Wave Velocities in a Shallow Slope Surface Layer. Sensors 2019, 19, 3406. [Google Scholar] [CrossRef] [PubMed]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Mixed Sand | Silica No. 7 |
|---|---|---|
| Dry density (ρd) (g/cm3) | 1.48 | 1.34 |
| Strength parameters (Φ) | 43.90 | 37.10 |
| Strength parameters (kPa) | 7.40 | 28.60 |
| Initial volumetric water content (%) | 7 | 7 |
| Case | Layers | Material | Relative Density (Dr) |
|---|---|---|---|
| 1 | 20 | Mixed sand | 50% |
| 2 | 10 | Mixed sand | 50% |
| 3 | 20 | Silica No. 7 | 70% |
| 4 | 20 | Silica No. 7 | 50% |
| 5 | 10 | Mixed sand | 50% |
| Case | Vertical Pressure | Horizontal Pressure | Water Injection Pressure |
|---|---|---|---|
| 6 | 8.40 kPa | 7.60 kPa | 0.15 kPa |
| 7 | 8.40 kPa | 8.60 kPa | 0.15 kPa |
| Case | Predicted Failure Time | Real Failure Time | Accuracy Ratio | α |
|---|---|---|---|---|
| 1 | 0.79 | 0.86 | 0.92 | 2.49 |
| 2 | 3.40 | 3.41 | 0.99 | 2.33 |
| 3 | 0.05 | 0.06 | 0.91 | 2.08 |
| 4 | 0.12 | 0.13 | 0.92 | 1.87 |
| 5 | 1.23 | 1.60 | 0.77 | 1.64 |
| 6 | 0.36 | 0.37 | 0.97 | 2.01 |
| 7 | 0.33 | 0.34 | 0.97 | 2.11 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fukuhara, M.; Uchimura, T.; Wang, L.; Tao, S.; Tang, J. Study on the Prediction of Slope Failure and Early Warning Thresholds Based on Model Tests. Geotechnics 2024, 4, 1-17. https://doi.org/10.3390/geotechnics4010001
Fukuhara M, Uchimura T, Wang L, Tao S, Tang J. Study on the Prediction of Slope Failure and Early Warning Thresholds Based on Model Tests. Geotechnics. 2024; 4(1):1-17. https://doi.org/10.3390/geotechnics4010001
Chicago/Turabian StyleFukuhara, Makoto, Taro Uchimura, Lin Wang, Shangning Tao, and Junfeng Tang. 2024. "Study on the Prediction of Slope Failure and Early Warning Thresholds Based on Model Tests" Geotechnics 4, no. 1: 1-17. https://doi.org/10.3390/geotechnics4010001