


OpenDroneMap: Multi-Platform Performance Analysis


Abstract
:1. Introduction
2. Materials and Methods
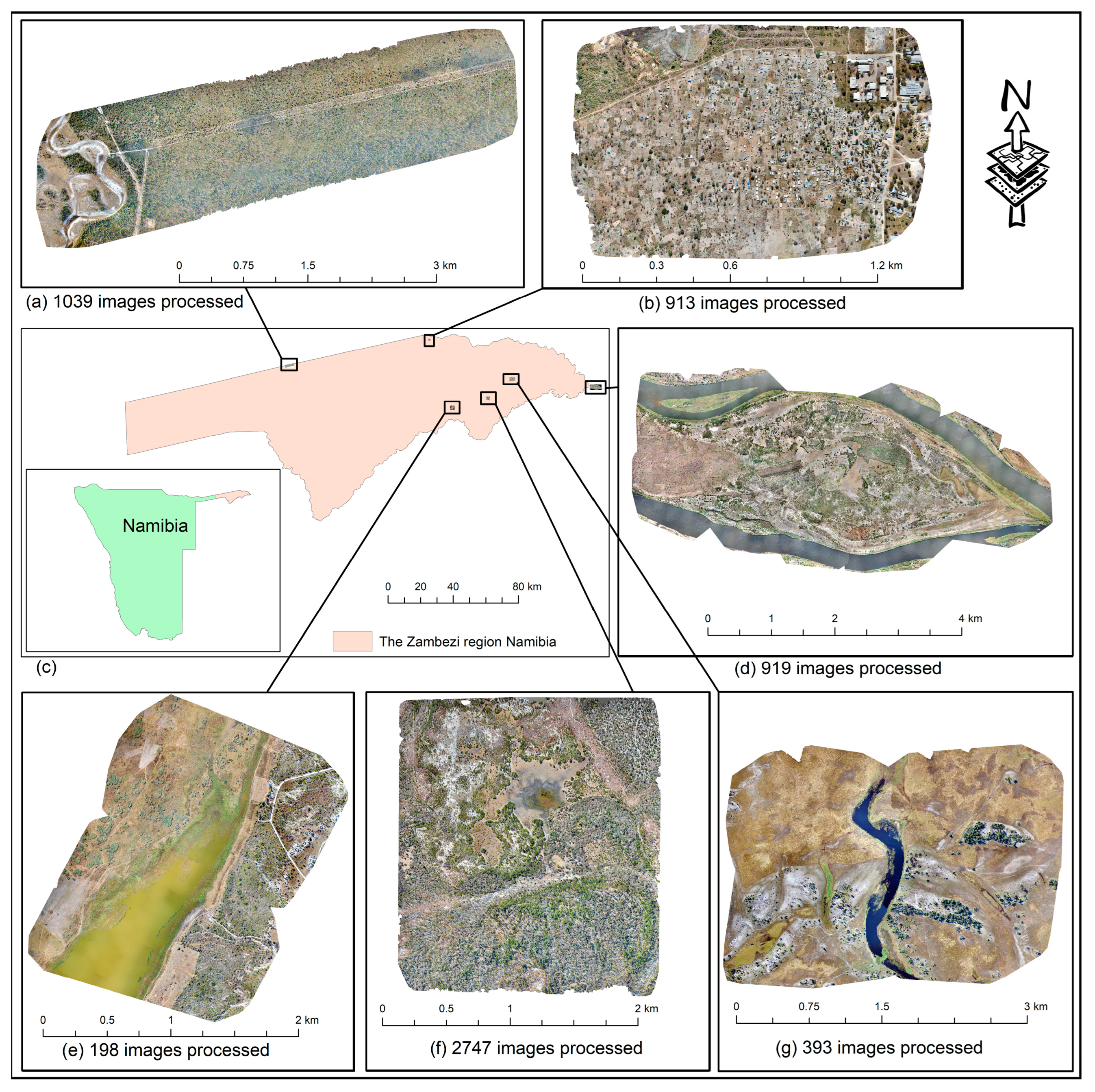
2.1. Data
2.2. Computing Environments for ODM Performance Testing
- Cloud computing virtual machines.
- A supercomputer
- A high-end Personal Computer (PC) and two laptops
2.3. Testing Configuration
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fuggetta, A. Open Source Software—An Evaluation. J. Syst. Softw. 2003, 66, 77–90. [Google Scholar] [CrossRef]
- Wang, J.; Shih, P.C.; Carroll, J.M. Revisiting Linus’s Law: Benefits and Challenges of Open Source Software Peer Review. Int. J. Hum. Comput. Stud. 2015, 77, 52–65. [Google Scholar] [CrossRef]
- Von Krogh, G.; Von Hippel, E. Special Issue on Open Source Software Development. Res. Policy 2003, 32, 1149–1157. [Google Scholar] [CrossRef]
- Fortunato, L.; Galassi, M. The Case for Free and Open Source Software in Research and Scholarship. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2021, 379, 20200079. [Google Scholar] [CrossRef] [PubMed]
- Peng, G.; Wan, Y.; Woodlock, P. Network Ties and the Success of Open Source Software Development. J. Strateg. Inf. Syst. 2013, 22, 269–281. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2020; Available online: http://www.R-project.org/ (accessed on 20 April 2023).
- Kogut, B.; Metiu, A. Open-Source Software Development and Distributed Innovation. Oxf. Rev. Econ. Policy 2001, 17, 248–264. [Google Scholar] [CrossRef]
- Gamalielsson, J.; Lundell, B. Sustainability of Open Source Software Communities beyond a Fork: How and Why Has the LibreOffice Project Evolved? J. Syst. Softw. 2014, 89, 128–145. [Google Scholar] [CrossRef] [Green Version]
- Mark, A. Achieving Quality in Open Source Software. IEEE Softw. 2007, 24, 58–64. [Google Scholar] [CrossRef]
- Schaarschmidt, M.; Walsh, G.; von Kortzfleisch, H.F.O. How Do Firms Influence Open Source Software Communities? A Framework and Empirical Analysis of Different Governance Modes. Inf. Organ. 2015, 25, 99–114. [Google Scholar] [CrossRef]
- Stamelos, I.; Angelis, L.; Oikonomou, A.; Bleris, G.L. Code Quality Analysis in Open Source Software Development. Inf. Syst. J. 2002, 12, 43–60. [Google Scholar] [CrossRef]
- Geist, A.; Reed, D.A. A Survey of High-Performance Computing Scaling Challenges. Int. J. High Perform. Comput. Appl. 2017, 31, 104–113. [Google Scholar] [CrossRef]
- Hill, Z.; Humphrey, M. A Quantitative Analysis of High Performance Computing with Amazon’s EC2 Infrastructure: The Death of the Local Cluster? In Proceedings of the IEEE/ACM International Workshop on Grid Computing, Banff, AB, Canada, 13–15 October 2009; pp. 26–33. [Google Scholar] [CrossRef]
- Chang, A.; Jung, J.; Landivar, J.; Landivar, J.; Barker, B.; Ghosh, R. Performance Evaluation of Parallel Structure from Motion (SFM) Processing with Public Cloud Computing and an on-Premise Cluster System for Uas Images in Agriculture. ISPRS Int. J. Geoinf. 2021, 10, 677. [Google Scholar] [CrossRef]
- Shah, S.A.R.; Waqas, A.; Kim, M.H.; Kim, T.H.; Yoon, H.; Noh, S.Y. Benchmarking and Performance Evaluations on Various Configurations of Virtual Machine and Containers for Cloud-Based Scientific Workloads. Appl. Sci. 2021, 11, 993. [Google Scholar] [CrossRef]
- Ben Belgacem, M.; Chopard, B. A Hybrid HPC/Cloud Distributed Infrastructure: Coupling EC2 Cloud Resources with HPC Clusters to Run Large Tightly Coupled Multiscale Applications. Future Gener. Comput. Syst. 2015, 42, 11–21. [Google Scholar] [CrossRef]
- Younge, A.J.; Henschel, R.; Brown, J.T.; von Laszewski, G.; Qiu, J.; Fox, G.C. Analysis of Virtualization Technologies for High Performance Computing Environments. In Proceedings of the 2011 IEEE 4th International Conference on Cloud Computing, Washington, DC, USA, 4–9 July 2011; pp. 9–16. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; von Laszewski, G.; Younge, A.; He, X.; Kunze, M.; Tao, J.; Fu, C. Cloud Computing: A Perspective Study. New Gener. Comp. 2010, 28, 137–146. [Google Scholar] [CrossRef] [Green Version]
- Huang, W.; Liu, J.; Abali, B.; Panda, D.K. A Case for High Performance Computing with Virtual Machines. In Proceedings of the 20th Annual International Conference on Supercomputing, Cairns, Australia, 28 June–1 July 2006. [Google Scholar] [CrossRef]
- Dillon, T.; Wu, C.; Chang, E. Cloud Computing: Issues and Challenges. In Proceedings of the International Conference on Advanced Information Networking and Applications, Perth, Australia, 20–23 April 2010; pp. 27–33. [Google Scholar] [CrossRef]
- Mauch, V.; Kunze, M.; Hillenbrand, M. High Performance Cloud Computing. Future Gener. Comput. Syst. 2013, 29, 1408–1416. [Google Scholar] [CrossRef]
- Toffanin, P. OpenDroneMap: The Missing Guide a Practical Guide to Drone Mapping Using Free and Open Source Software; Independently Publisher: Traverse City, MI, USA, 2019. [Google Scholar]
- CSC. What Is Pouta—Docs CSC. Available online: https://docs.csc.fi/cloud/pouta/pouta-what-is/ (accessed on 17 March 2023).
- An Open Infra Project Open Source Cloud Computing Platform Software—OpenStack. Available online: https://www.openstack.org/software/ (accessed on 17 March 2023).
- CSC-Cloud Cloud—Docs CSC. Available online: https://docs.csc.fi/cloud/ (accessed on 17 March 2023).
- CSC. Puhti—Docs CSC. Available online: https://docs.csc.fi/computing/systems-puhti/ (accessed on 10 March 2023).
- Meyer, S.; Morrison, J.P. Supporting Heterogeneous Pools in a Single Ceph Storage Cluster. In Proceedings of the 17th International Symposium on Symbolic and Numeric Algorithms for Scientific Computing (SYNASC), Timisoara, Romania, 21–24 September 2015; pp. 352–359. [Google Scholar] [CrossRef]
- Tang, X.; Yao, X.; Liu, D.; Zhao, L.; Li, L.; Zhu, D.; Li, G. A Ceph-Based Storage Strategy for Big Gridded Remote Sensing Data. Big Earth Data 2022, 6, 323–339. [Google Scholar] [CrossRef]
- Zhang, X.; Gaddam, S.; Chronopoulos, A.T. Ceph Distributed File System Benchmarks on an OpenStack Cloud. In Proceedings of the 2015 IEEE International Conference on Cloud Computing in Emerging Markets (CCEM), Bangalore, India, 25–27 November 2015; pp. 113–120. [Google Scholar] [CrossRef]
- CSC. Introduction to Allas Storage Service—Docs CSC. Available online: https://docs.csc.fi/data/Allas/introduction/ (accessed on 29 March 2023).
- Shiva Hardware Recommendations—CPU Cores, Graphics Card, CUDA, NVIDIA, Memory, RAM, Storage—Learning Area—OpenDroneMap Community. Available online: https://community.opendronemap.org/t/hardware-recommendations-cpu-cores-graphics-card-cuda-nvidia-memory-ram-storage/13705 (accessed on 6 April 2023).
- Installation and Getting Started—OpenDroneMap 3.0.5 Documentation. Available online: https://docs.opendronemap.org/installation/#quickstart (accessed on 17 March 2023).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flavor | Number of Cores | Memory (GB) |
|---|---|---|
| hpc.4.5core | 5 | 21 |
| hpc.4.10core | 10 | 42 |
| hpc.5.16core | 16 | 58 |
| hpc.4.20core | 20 | 85 |
| hpc.5.32core | 32 | 116 |
| hpc.4.40core | 40 | 171 |
| hpc.5.64core | 64 | 232 |
| Number of Cores | Memory Per Core (GB) |
|---|---|
| 1 | 20 |
| 3 | 20 |
| 5 | 20 |
| 15 | 8 |
| 20 | 5 |
| 25 | 8 |
| 30 | 5 |
| 40 | 3 |
| Flavor | CPU | GPU | CPU Cores | Memory, GB |
|---|---|---|---|---|
| cPouta hpc4 | Intel(R) Xeon(R) Gold 6148 CPU @ 2.40 GHz, hyper-threading | - | 5–40 | 21–171 |
| cPouta hpc5 | AMD EPYC 7702 64-Core Processor, boost up to 3.35 GHz | - | 16–64 | 58–232 |
| Puhti supercomputer | Intel Xeon Gold 6230 2.1 GHz | NVIDIA Volta V100 | 1–40 | 1–240 (up to 1500 available) |
| 64-bit laptop W11 | 11th Gen Intel(R) Core (TM) i7-11800H @ 2.30 GHz 2.30 GHz | NVIDIA T1200 | 8 | 64 |
| 64-bit laptop W11 | 11th Gen Intel(R) Core (TM) i9-11950H @ 2.60 GHz 2.61 GHz | NVIDIA T1200 | 8 | 64 |
| 64-bit desktop W10 | Intel(R) Core (TM) i9-7980XE CPU @ 2.60 GHz 2.59 GHz | NVIDIA Quadro P4000 | 18 | 64 |
| Number of Images Processed for Each Time Column | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| VM Flavor | Cores | RAM | Time (hours and minutes) | ||||||
| 198 | 393 | 913 | 919 | 1039 | 2747 | 7917 | |||
| hpc4 | 5 | 21 | 0:45 | 72:18 (100) | 10:28 (100) | 200:07 (100) | 151:44 (100) | 25:11 (100) | — |
| hpc4 | 10 | 42 | 0:38 | 2:12 | 4:42 (200) | 192:53 (200) | 80:02 (200) | 13:14 (600) | — |
| hpc5 | 16 | 58 | 0:35 | 1:53 | 3:27 | 115:31 (400) | 82:02 (400) | 12:12 (700) | — |
| hpc4 | 20 | 85 | 0:37 | 1:50 | 3:29 | 4:51 | 4:52 | 10:40 (1000) | 65:32 (1500) |
| hpc5 | 32 | 116 | 0:35 | 1:59 | 3:41 | 3:39 | 4:48 | 12:00 | 46:37 (500) |
| hpc4 | 40 | 171 | 0:36 | 1:48 | 3:03 | 4:46 | 4:23 | 10:21 | 61:33 (500) |
| hpc5 | 64 | 232 | 0:38 | 2:06 | 3:51 | 3:18 | 4:50 | 11:50 | 50:57 (500) |
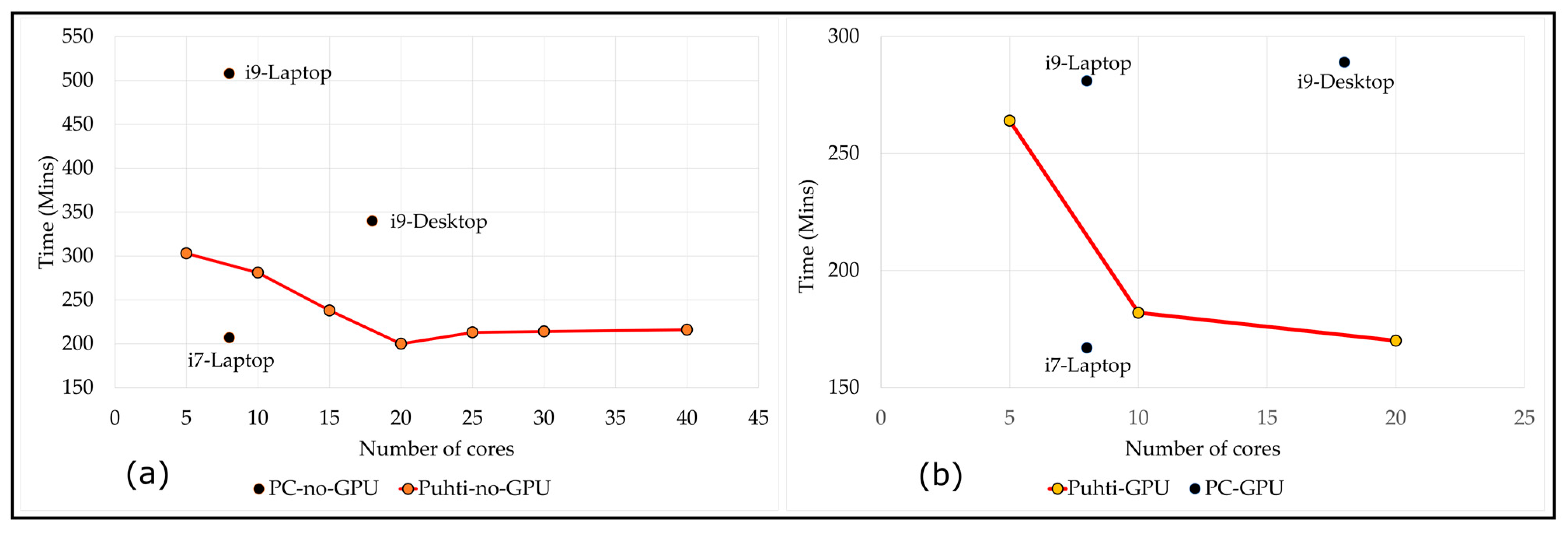
| System Type | Cores | Memory (GB) | Time (Hours and Minutes) | Speed Gain with GPU, % | |
|---|---|---|---|---|---|
| No GPU | With GPU | ||||
| 64-bit, i7 (Laptop) | 8 | 64 | 3:27 | 2:47 | 19 |
| 64-bit, i9 (Laptop) | 8 | 64 | 8:28 | 4:41 | 45 |
| 64-bit, i9 (Desktop) | 18 | 64 | 5:40 | 4:49 | 15 |
| Puhti supercomputer | 1 | 60 | 11:48 | - | - |
| Puhti supercomputer | 3 | 30 | 6:17 | - | - |
| Puhti supercomputer | 5 | 100 | 5:03 | 4:24 | 13 |
| Puhti supercomputer | 10 | 100 | 4:41 | 3:02 | 35 |
| Puhti supercomputer | 15 | 120 | 3:58 | - | - |
| Puhti supercomputer | 20 | 100 | 3:20 | 2:50 | 15 |
| Puhti supercomputer | 25 | 200 | 3:33 | - | - |
| Puhti supercomputer | 30 | 240 | 3:34 | - | - |
| Puhti supercomputer | 40 | 120 | 3:36 | - | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gbagir, A.-M.G.; Ek, K.; Colpaert, A. OpenDroneMap: Multi-Platform Performance Analysis. Geographies 2023, 3, 446-458. https://doi.org/10.3390/geographies3030023
Gbagir A-MG, Ek K, Colpaert A. OpenDroneMap: Multi-Platform Performance Analysis. Geographies. 2023; 3(3):446-458. https://doi.org/10.3390/geographies3030023
Chicago/Turabian StyleGbagir, Augustine-Moses Gaavwase, Kylli Ek, and Alfred Colpaert. 2023. "OpenDroneMap: Multi-Platform Performance Analysis" Geographies 3, no. 3: 446-458. https://doi.org/10.3390/geographies3030023