Employing Robotics for the Biomechanical Validation of a Prosthetic Flipper for Sea Turtles as a Substitute for Animal Clinical Trials



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
2.1. Design Overview and Objective
2.2. Prosthetic Flipper Design and Manufacturing
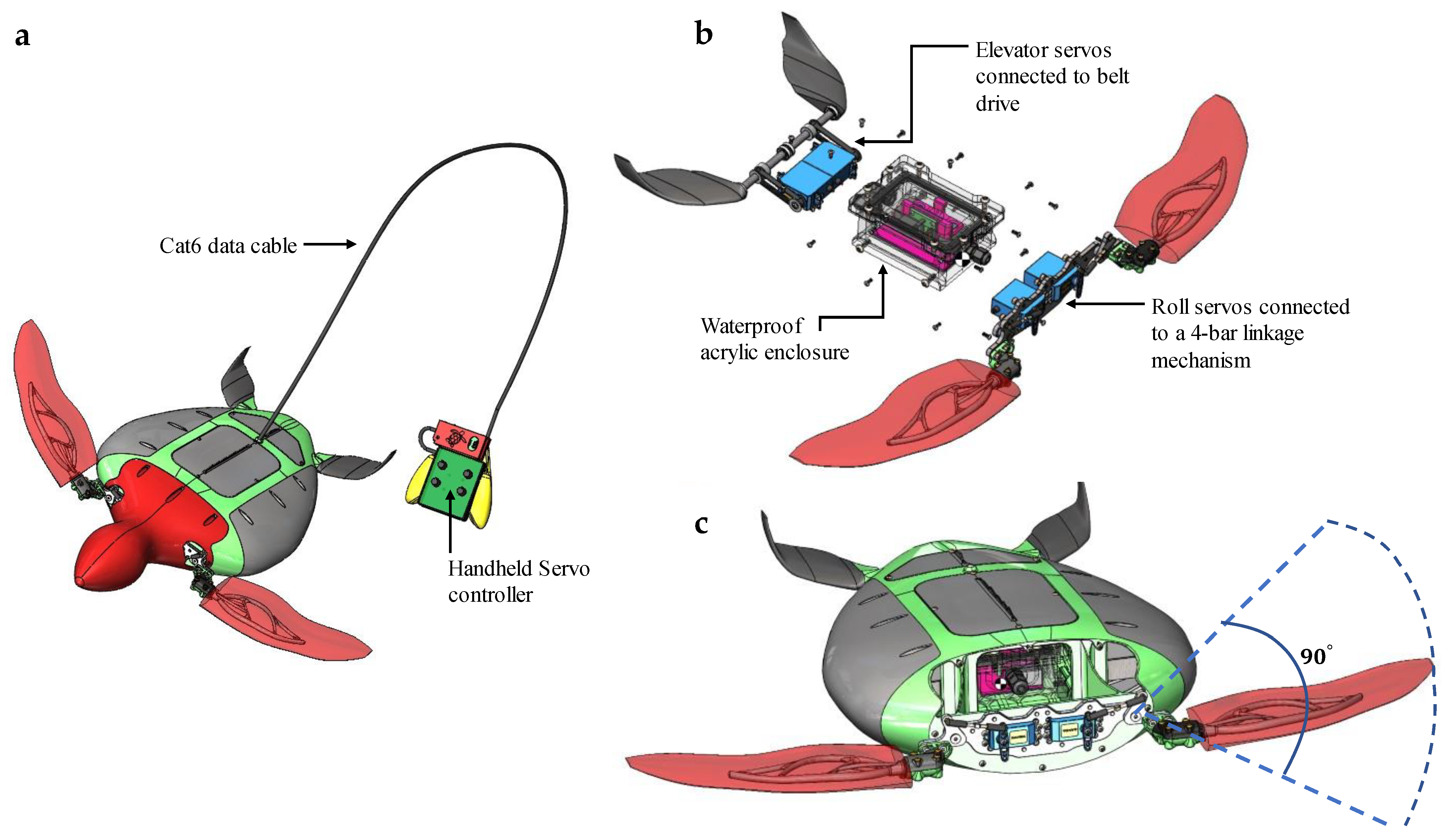
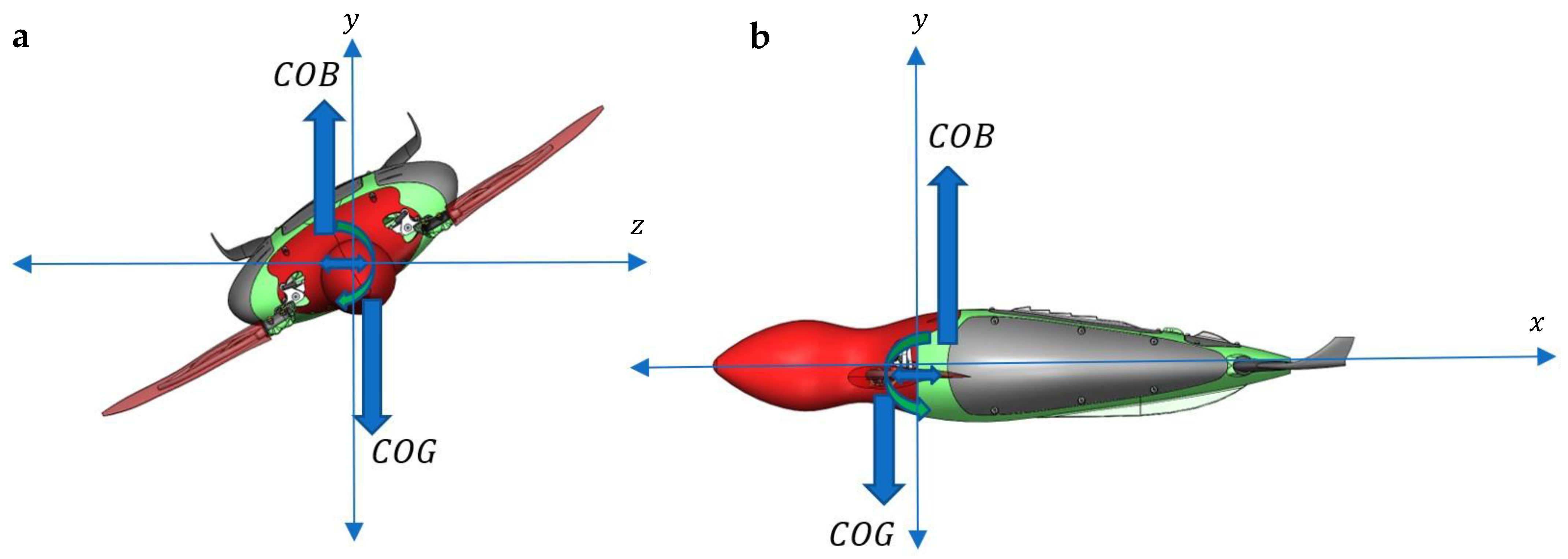
2.3. Sea-Turtle-Inspired Robot Design and Manufacture
3. Results and Discussion
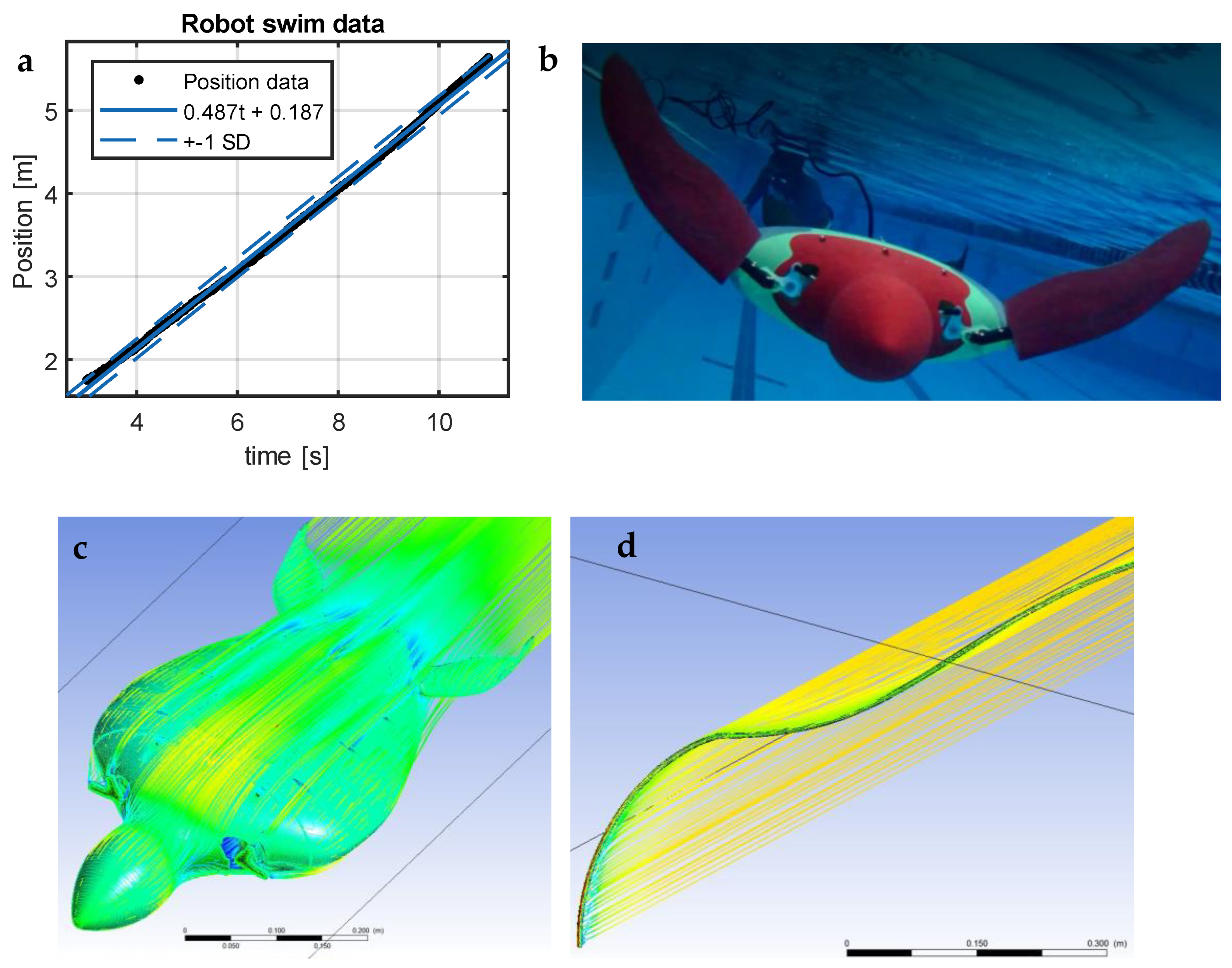
3.1. Swim Speed and Average Thrust Generation
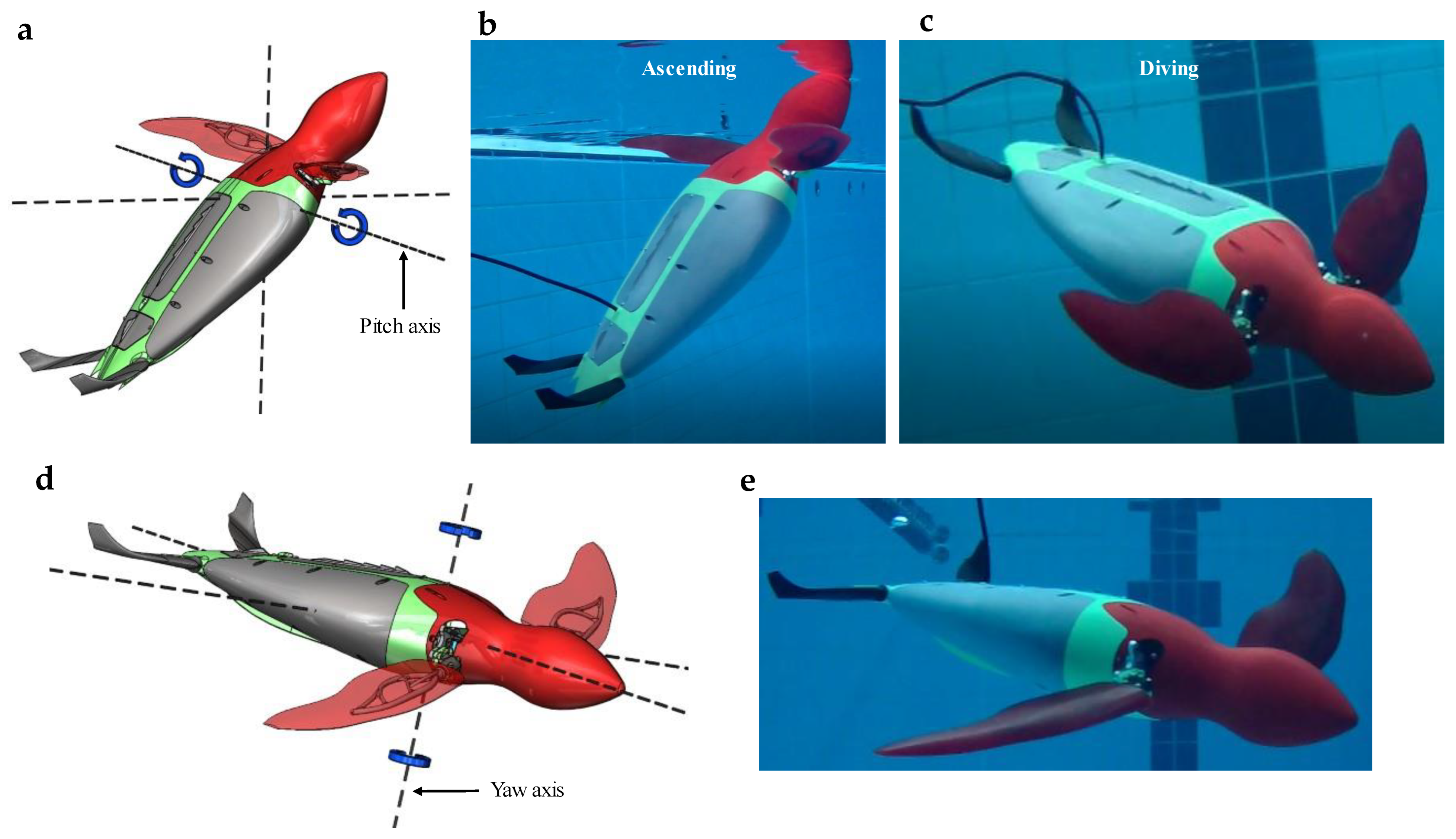
3.2. Manoeuvrability Tests
4. Conclusions and Future Work
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Garibaldi, A.; Turner, N. Cultural Keystone Species: Implications for Ecological Conservation and Restoration. Ecol. Soc. 2004, 9, 1. [Google Scholar] [CrossRef]
- Coleman, F.C.; Williams, S.L. Overexploiting marine ecosystem engineers: Potential consequences for biodiversity. Trends Ecol. Evol. 2002, 17, 40–44. [Google Scholar] [CrossRef]
- Hannan, L.B.; Roth, J.D.; Ehrhart, L.M.; Weishampel, J.F. Dune vegetation fertilization by nesting sea turtles. Ecology 2007, 88, 1053–1058. [Google Scholar] [CrossRef] [PubMed]
- Houghton, J.D.R.; Doyle, T.K.; Wilson, M.W.; Davenport, J.; Hays, G.C. Jellyfish Aggregations and Leatherback Turtle Foraging Patterns in a Temperate Coastal Environment. Ecology 2006, 87, 1967–1972. [Google Scholar] [CrossRef] [PubMed]
- Martins, R.F.; Andrades, R.; Nagaoka, S.M.; Martins, A.S.; Longo, L.L.; Ferreira, J.S.; Bastos, K.V.; Joyeux, J.-C.; Santos, R.G. Niche partitioning between sea turtles in waters of a protected tropical island. Reg. Stud. Mar. Sci. 2020, 39, 101439. [Google Scholar] [CrossRef]
- Davic, R.D. Linking Keystone Species and Functional Groups: A New Operational Definition of the Keystone Species Concept. Conserv. Ecol. 2003, 7, 1. [Google Scholar] [CrossRef]
- Lawton, J.H.; Jones, C.G. Linking Species and Ecosystems: Organisms as Ecosystem Engineers. In Linking Species & Ecosystems; Jones, C.G., Lawton, J.H., Eds.; Springer: Boston, MA, USA, 1995; pp. 141–150. [Google Scholar] [CrossRef]
- Tisdell, C.; Wilson, C. Ecotourism for the survival of sea turtles and other wildlife. Biodivers. Conserv. 2002, 11, 1521–1538. [Google Scholar] [CrossRef]
- Lewison, R.L.; Crowder, L.B. Putting Longline Bycatch of Sea Turtles into Perspective. Conserv. Biol. 2007, 21, 79–86. [Google Scholar] [CrossRef]
- Stelfox, M.; Bulling, M.; Sweet, M. Untangling the origin of ghost gear within the Maldivian archipelago and its impact on olive ridley (Lepidochelys olivacea) populations. Endanger. Species Res. 2019, 40, 309–320. [Google Scholar] [CrossRef]
- Davenport, J. Temperature and the life-history strategies of sea turtles. J. Therm. Biol. 1997, 22, 479–488. [Google Scholar] [CrossRef]
- Sun, X.; Kato, N.; Matsuda, Y.; Kanda, K.; Kosaka, Y.; Kamezaki, N.; Taniguchi, M. Three-dimensional Hydrodynamic Analysis of Forelimb Propulsion of Sea Turtle with Prosthetic Flippers. J. Aero Aqua Bio-Mech. 2013, 3, 36–44. [Google Scholar] [CrossRef]
- van der Geest, N.; Garcia, L.; Nates, R.; Godoy, D.A. New insight into the swimming kinematics of wild Green sea turtles (Chelonia mydas). Sci. Rep. 2022, 12, 18151. [Google Scholar] [CrossRef] [PubMed]
- Ayub, R.; Villarreal, D.; Gregg, R.D.; Gao, F. Evaluation of transradial body-powered prostheses using a robotic simulator. Prosthetics Orthot. Int. 2017, 41, 194–200. [Google Scholar] [CrossRef] [PubMed]
- Caputo, J.M.; Collins, S.H. An experimental robotic testbed for accelerated development of ankle prostheses. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 2645–2650. [Google Scholar]
- Kashef, S.R.; Amini, S.; Akbarzadeh, A. Robotic hand: A review on linkage-driven finger mechanisms of prosthetic hands and evaluation of the performance criteria. Mech. Mach. Theory 2019, 145, 103677. [Google Scholar] [CrossRef]
- Vayssette, B.; Saintier, N.; Brugger, C.; Elmay, M.; Pessard, E. Surface roughness of Ti-6Al-4V parts obtained by SLM and EBM: Effect on the High Cycle Fatigue life. Procedia Eng. 2018, 213, 89–97. [Google Scholar] [CrossRef]
- van der Geest, N.; Garcia, L.; Borret, F.; Nates, R.; Gonzalez, A. Soft-robotic green sea turtle (Chelonia mydas) developed to replace animal experimentation provides new insight into their propulsive strategies. Sci. Rep. 2023, 13, 11983. [Google Scholar] [CrossRef]
- Pilliar, R.M.; Cameron, H.U.; Binnington, A.G.; Szivek, J.; Macnab, I. Bone ingrowth and stress shielding with a porous surface coated fracture fixation plate. J. Biomed. Mater. Res. 1979, 13, 799–810. [Google Scholar] [CrossRef]
- Jafari Chashmi, M.; Fathi, A.; Shirzad, M.; Jafari-Talookolaei, R.-A.; Bodaghi, M.; Rabiee, S.M. Design and Analysis of Porous Functionally Graded Femoral Prostheses with Improved Stress Shielding. Designs 2020, 4, 12. [Google Scholar] [CrossRef]
- Arabnejad, S.; Johnston, B.; Tanzer, M.; Pasini, D. Fully porous 3D printed titanium femoral stem to reduce stress-shielding following total hip arthroplasty. J. Orthop. Res. 2016, 35, 1774–1783. [Google Scholar] [CrossRef]
- van der Geest, N.; Garcia, L.; Nates, R.; Gonzalez-Vazquez, A. Sea Turtles Employ Drag-Reducing Techniques to Conserve Energy. J. Mar. Sci. Eng. 2022, 10, 1770. [Google Scholar] [CrossRef]
- Davenport, J.; Munks, S.A.; Oxford, P.J. A comparison of the swimming of marine and freshwater turtles. Proc. R. Soc. London. Ser. B Boil. Sci. 1984, 220, 447–475. [Google Scholar] [CrossRef]
- Booth, D.T. Kinematics of swimming and thrust production during powerstroking bouts of the swim frenzy in green turtle hatchlings. Biol. Open 2014, 3, 887–894. [Google Scholar] [CrossRef] [PubMed]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
van der Geest, N.; Garcia, L. Employing Robotics for the Biomechanical Validation of a Prosthetic Flipper for Sea Turtles as a Substitute for Animal Clinical Trials. Biomechanics 2023, 3, 401-414. https://doi.org/10.3390/biomechanics3030033
van der Geest N, Garcia L. Employing Robotics for the Biomechanical Validation of a Prosthetic Flipper for Sea Turtles as a Substitute for Animal Clinical Trials. Biomechanics. 2023; 3(3):401-414. https://doi.org/10.3390/biomechanics3030033
Chicago/Turabian Stylevan der Geest, Nick, and Lorenzo Garcia. 2023. "Employing Robotics for the Biomechanical Validation of a Prosthetic Flipper for Sea Turtles as a Substitute for Animal Clinical Trials" Biomechanics 3, no. 3: 401-414. https://doi.org/10.3390/biomechanics3030033