
Analysis of Axial Acceleration for the Detection of Rail Squats in High-Speed Railways
Abstract
:1. Introduction
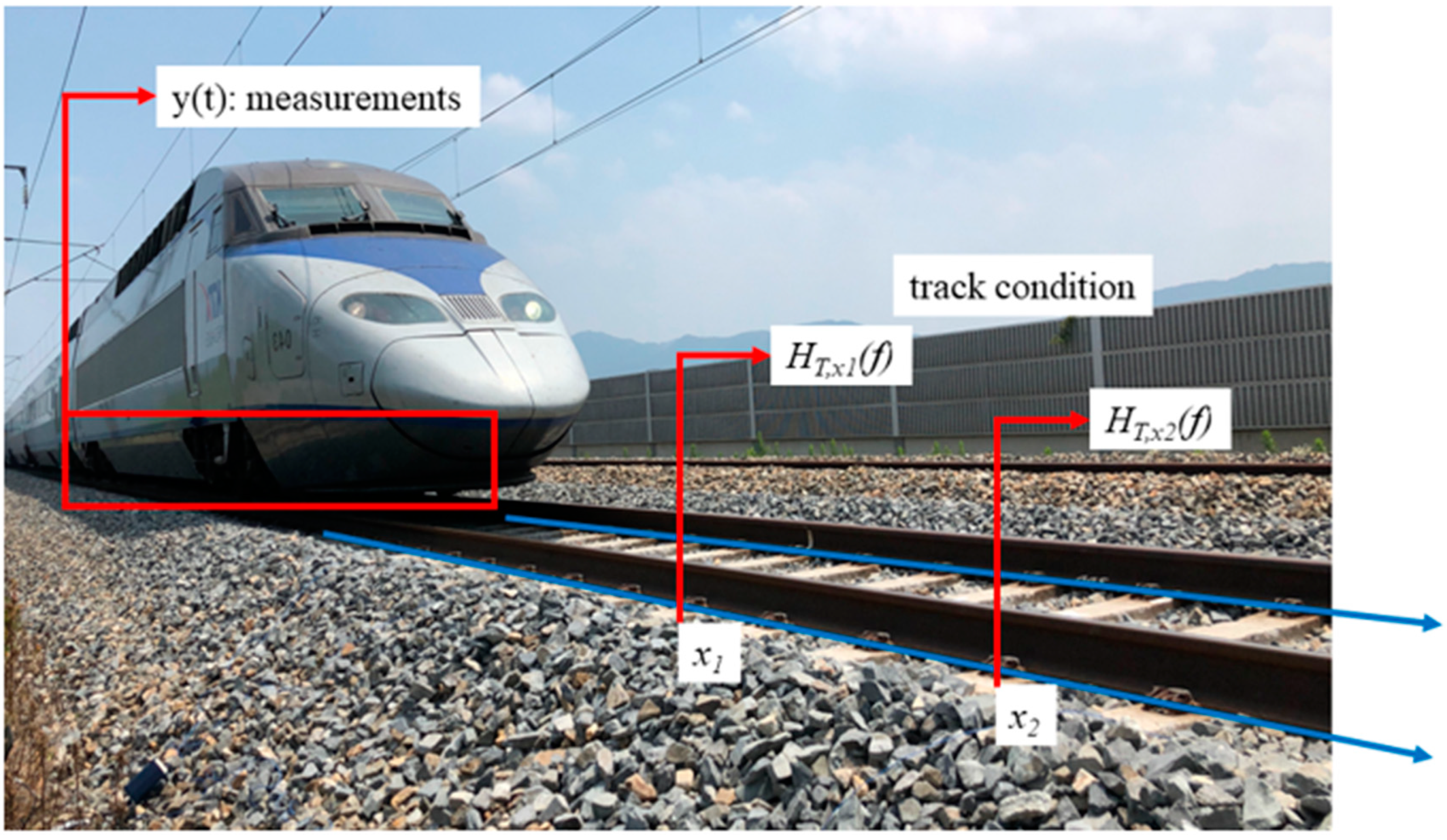
2. Track Frequency Monitoring Using ABA
3. Measurement of Wheel Vibration Acceleration Using an Impact Hammer
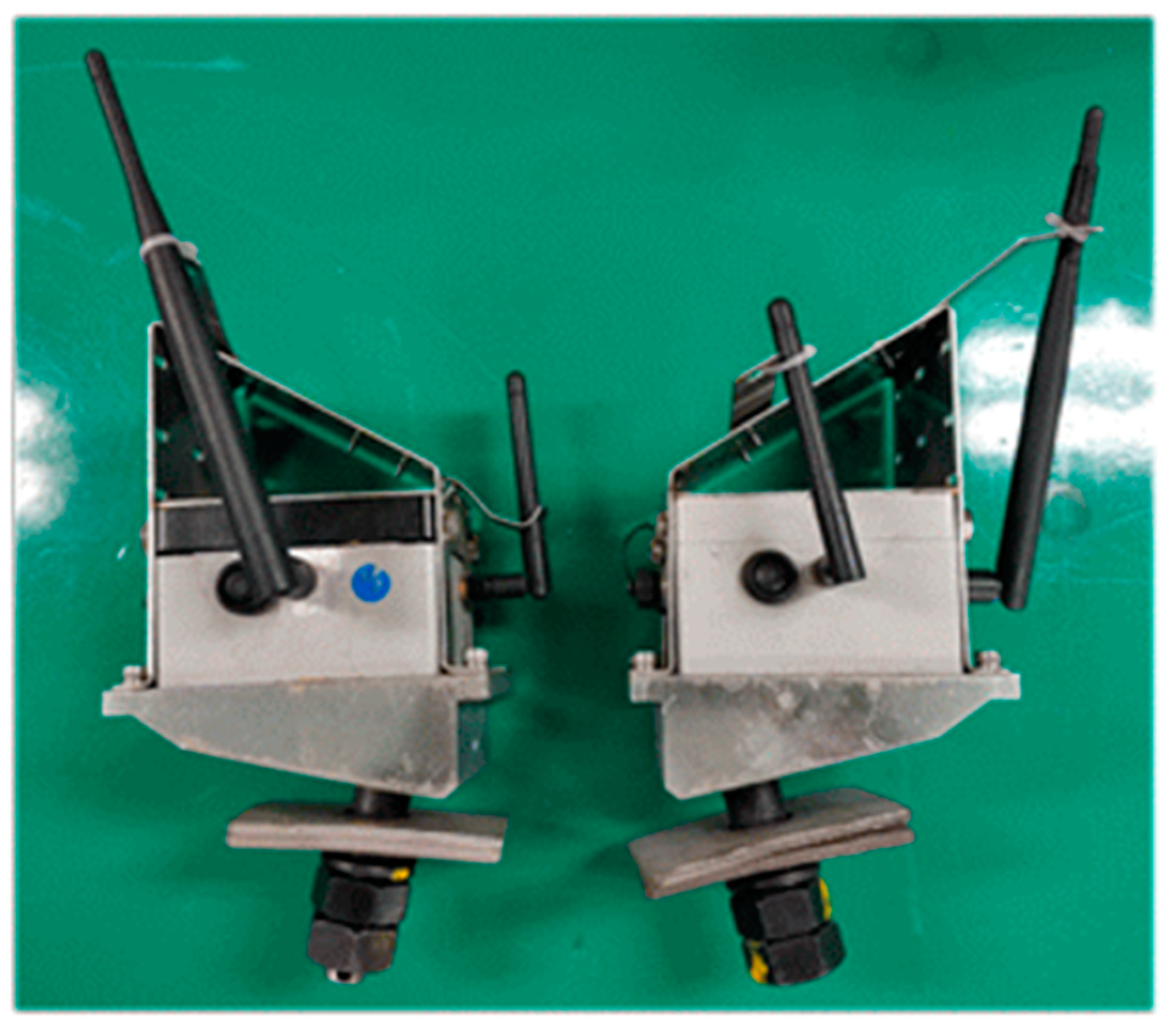
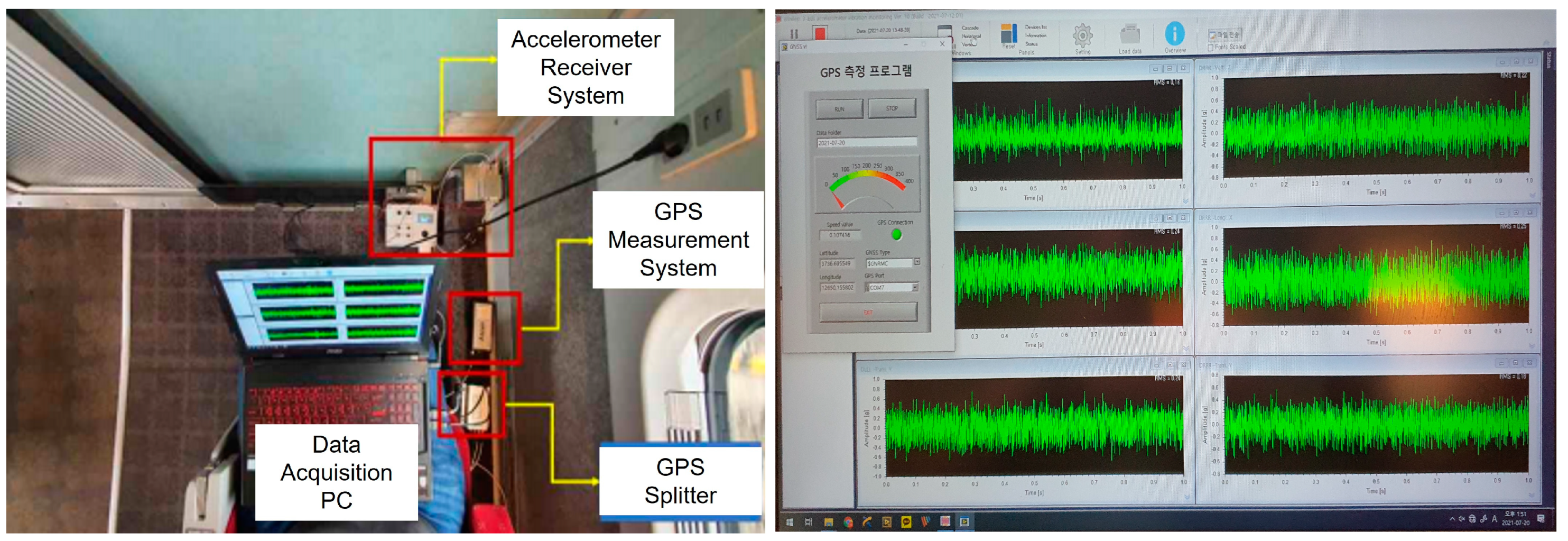
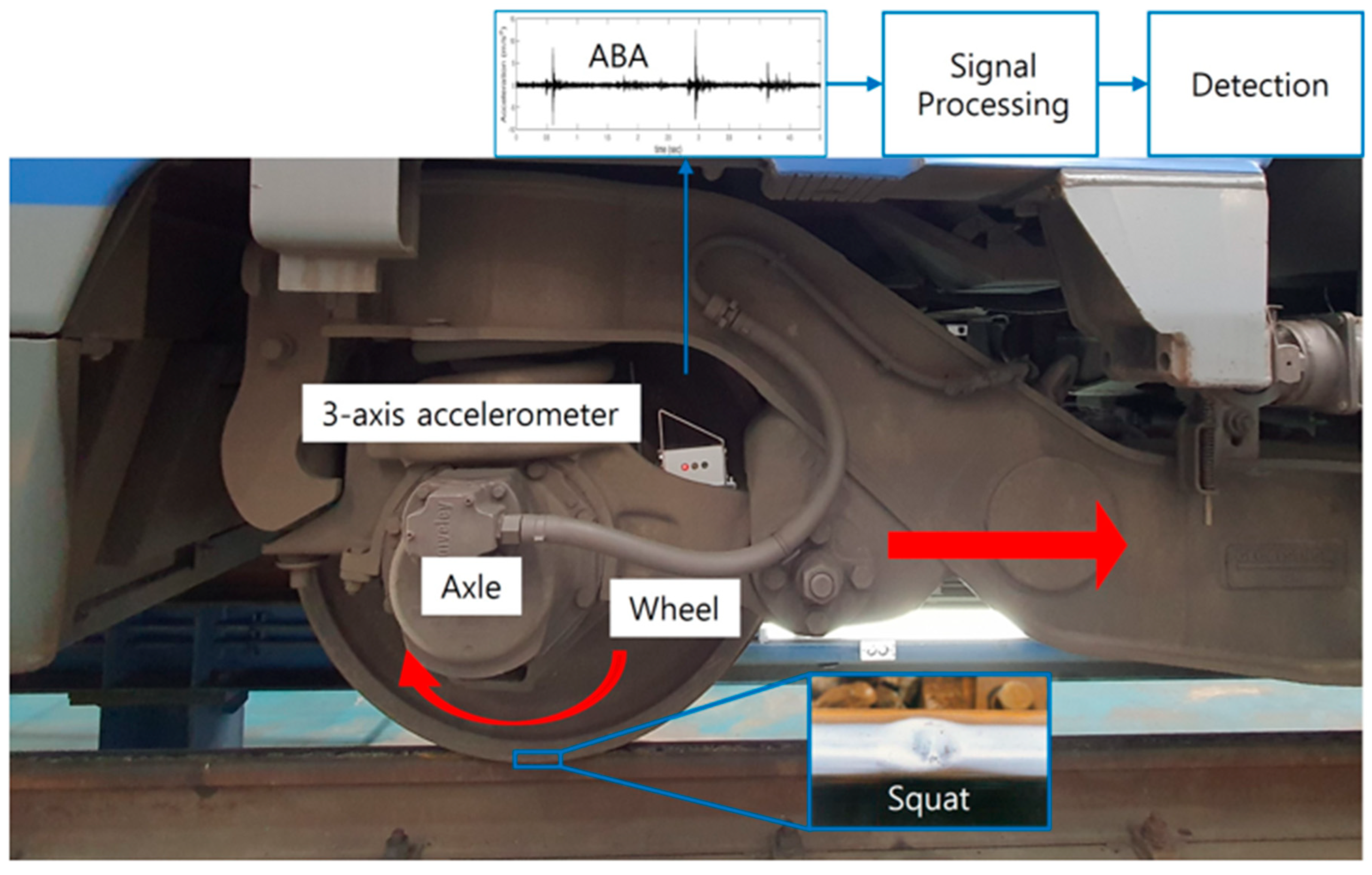
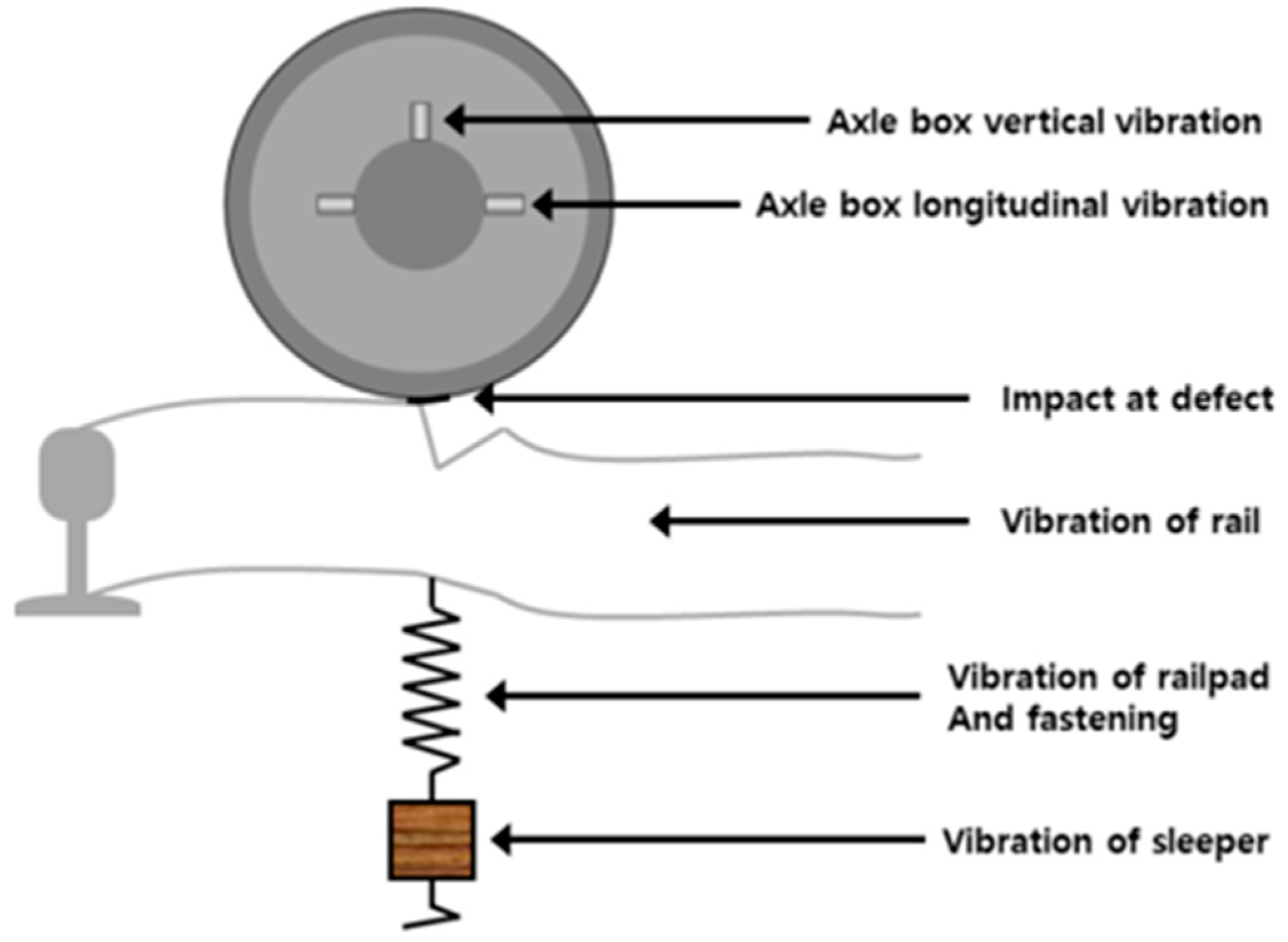
3.1. Accelerometer for ABA measurement
3.2. Design Methodology for ABA Measurement
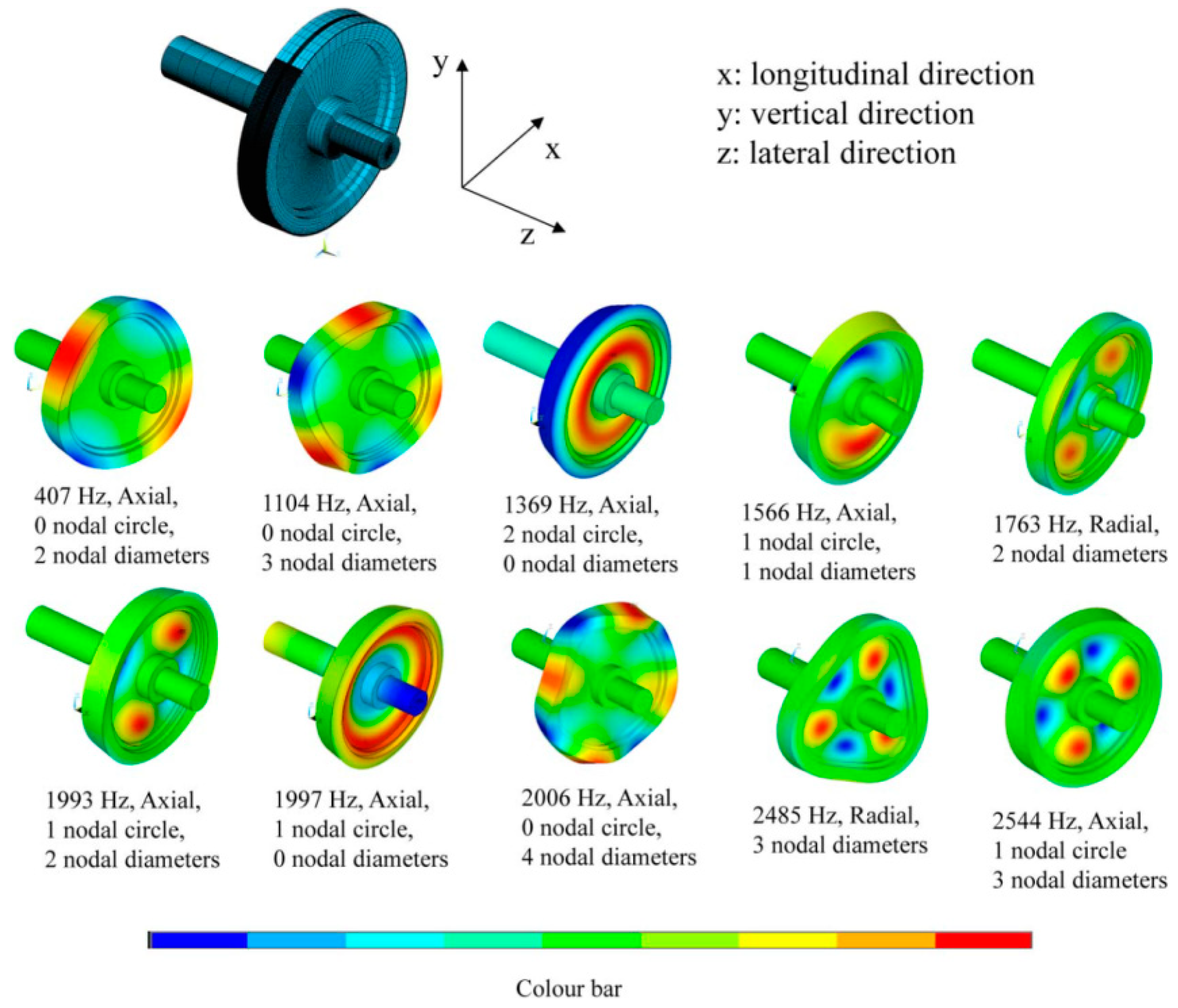
3.3. Previous Studies on Wheel Vibration Modes
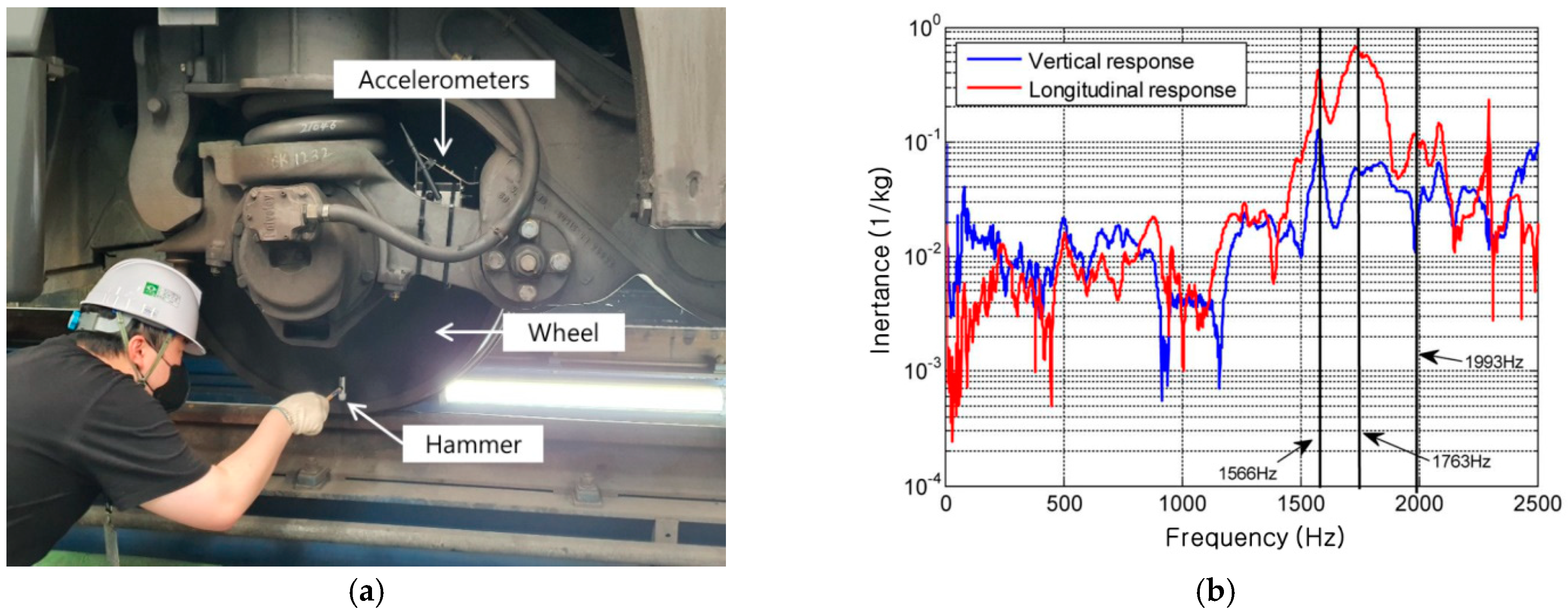
3.4. Impact Hammer Test
4. Analysis of Wavelet Power Spectrum
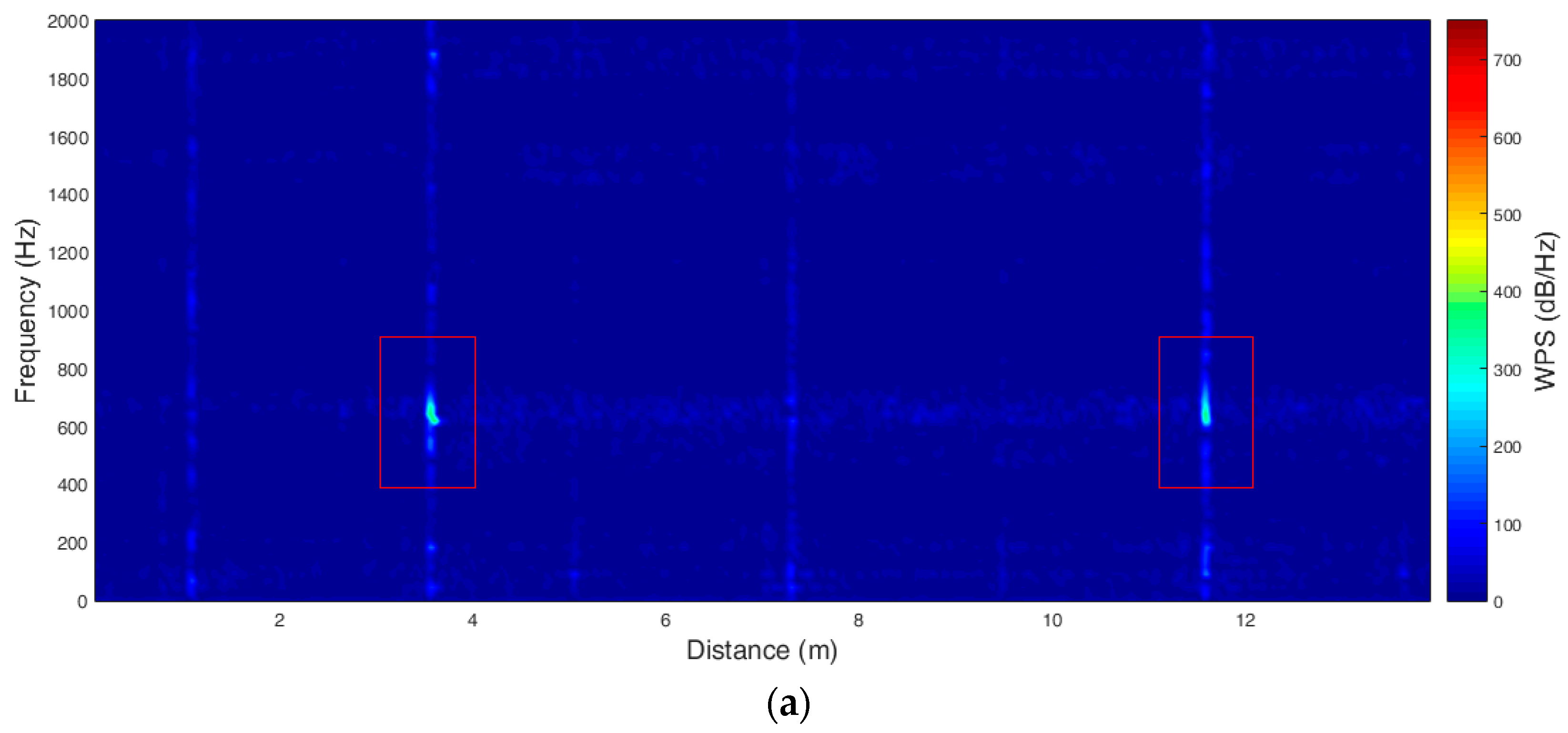
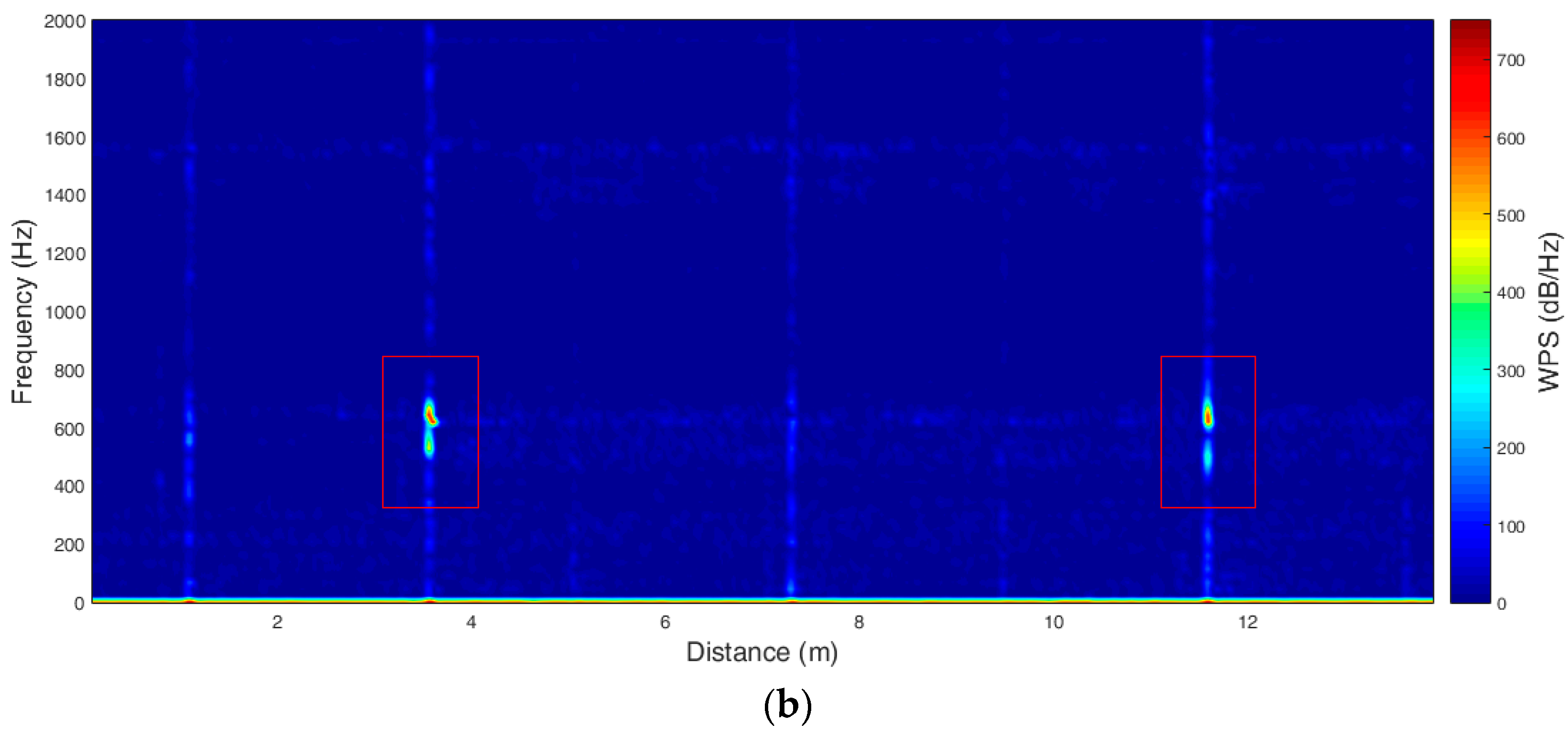
4.1. Comparison between Vertical and Longitudinal ABA Measurements
4.2. Sites with Actual Squat Defects and WPS Analysis Results
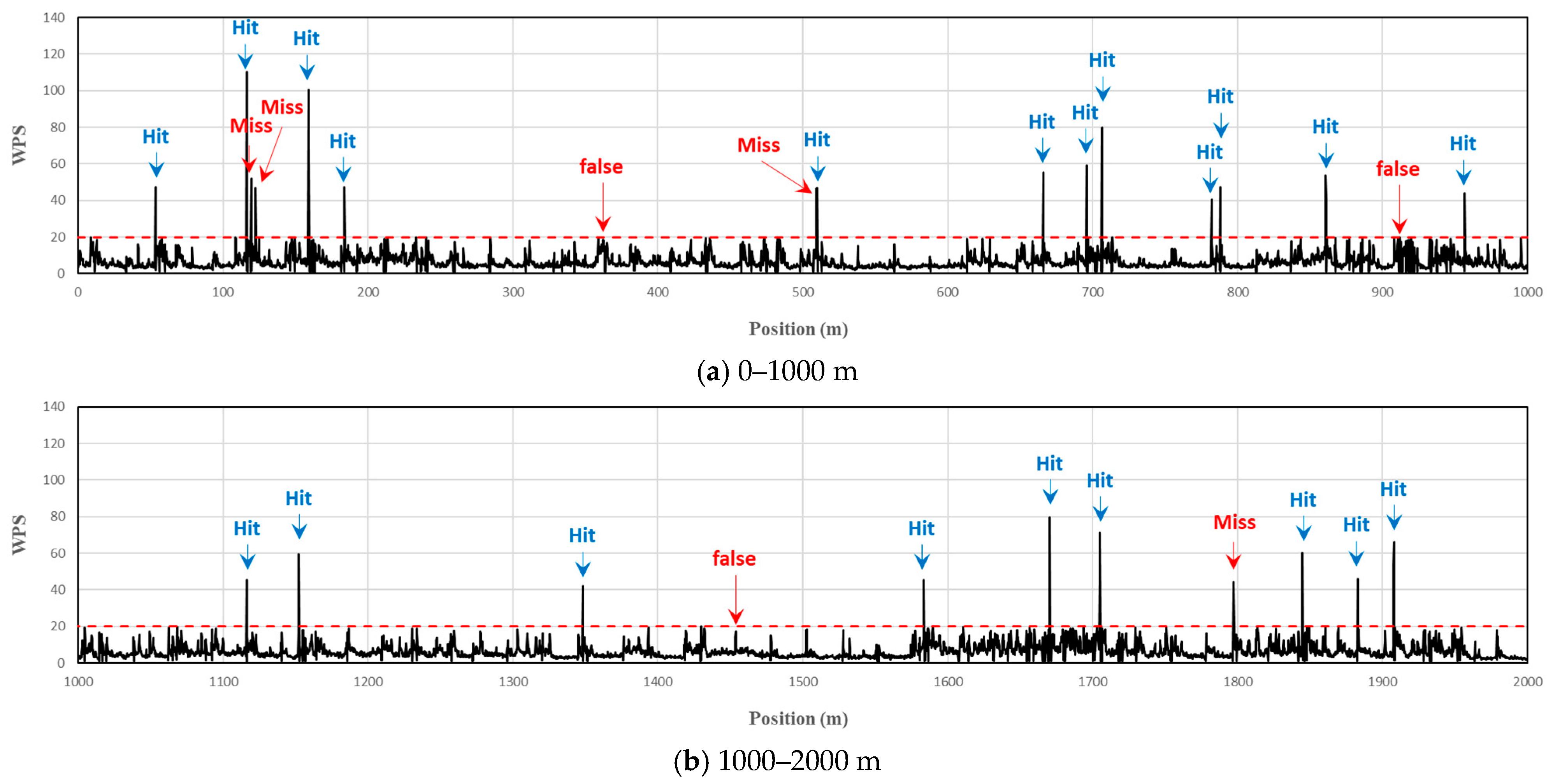
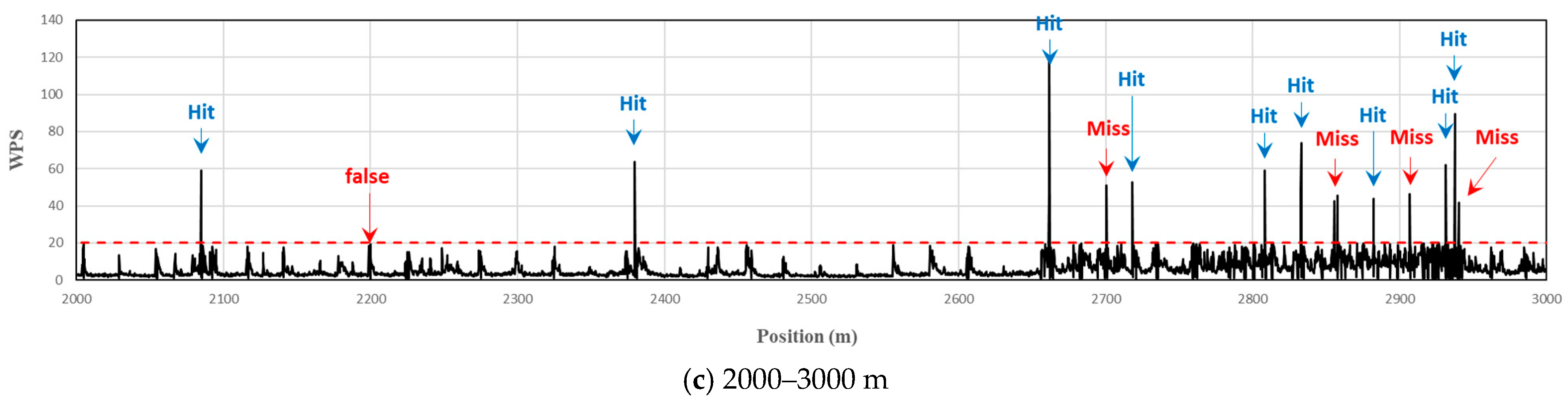
4.3. Detection of Squat Defects
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sánchez, C.R.; Fernández, F.J.G.; Vena, L.C.S.; Carpio, J.; Castro, M. Industrial telemaintenance: Remote management experience from subway to industrial electronics. IEEE Trans. Ind. Electron. 2011, 58, 1044–1051. [Google Scholar] [CrossRef]
- Papaelias, M.P.; Roberts, C.; Davis, C.L. A review on non-destructive evaluation of rails: State-of-the-art and future development. Proc. Inst. Mech. Eng. Rail Rapid Transit 2008, 222, 367–384. [Google Scholar] [CrossRef]
- Guzinski, J.; Abu-Rub, H.; Diguet, M.; Krzeminski, Z.; Lewicki, A. Speed and load torque observer application in high-speed train electric drive. IEEE Trans. Ind. Electron. 2010, 57, 565–574. [Google Scholar] [CrossRef]
- Bosso, N.; Gugliotta, A.; Zampieri, N. A comprehensive strategy to estimate track condition and its evolution. Int. J. Railw. Technol. 2012, 1, 1–19. [Google Scholar] [CrossRef]
- Iwnicki, S.D.; Bevan, A.J. Damage to railway wheels and rails: A review of the causes, prediction methods, reduction and allocation of costs. Int. J. Railw. Technol. 2012, 1, 121–146. [Google Scholar] [CrossRef]
- Toliyat, H.; Abbaszadeh, K.; Rahimian, M.; Olson, L.E. Rail defect diagnosis using wavelet packet decomposition. IEEE Trans. Ind. Appl. 2003, 39, 1454–1461. [Google Scholar] [CrossRef]
- Marino, F.; Distante, A.; Mazzeo, P.L.; Stella, E. A real-time visual inspection system for railway maintenance: Automatic hexagonal-headed bolts detection. IEEE Trans. Syst. Man Cybern. C Appl. Rev. 2007, 37, 418–428. [Google Scholar] [CrossRef]
- Papaelias, M.P.; Lugg, M. Detection and evaluation of rail surface defects using alternating current field measurement techniques. Proc. Inst. Mech. Eng. Rail Rapid Transit 2012, 226, 530–541. [Google Scholar] [CrossRef]
- Li, Y.; Trinh, H.; Haas, N.; Otto, C.; Pankanti, S. Rail component detection, optimization, assessment for automatic rail track inspection. IEEE Trans. Intell. Transp. Syst. 2014, 15, 760–770. [Google Scholar]
- Stratman, B.; Liu, Y.; Mahadevan, S. Structural health monitoring of railroad wheels using wheel impact load detectors. J. Fail. Anal. Prev. 2007, 7, 218–225. [Google Scholar] [CrossRef]
- Thakkar, N.A.; Steel, J.A.; Reuben, R.L. Rail-wheel contact stress assessment using acoustic emission: A laboratory study of the effects of wheel flats. Proc. Inst. Mech. Eng. Rail Rapid Transit 2012, 226, 3–13. [Google Scholar] [CrossRef]
- Lowe, M.J.S.; Cawley, P. Long Range Guided Wave Inspection Usage-Current Commercial Capabilities and Research Directions. 2014. Available online: http://www3.imperial.ac.uk/nde/publications (accessed on 29 March 2006).
- Esveld, C. Modern Railway Track, 2nd ed.; MRT-Productions: Zaltbommel, The Netherlands, 2001. [Google Scholar]
- Wang, J.S.; Fang-Chen, C. An accelerometer-based digital pen with a trajectory recognition algorithm for handwritten digit and gesture recognition. IEEE Trans. Ind. Electron. 2012, 59, 2998–3007. [Google Scholar] [CrossRef]
- Wen-Hong, Z.; Lamarche, T. Velocity estimation by using position and acceleration sensors. IEEE Trans. Ind. Electron. 2007, 54, 2706–2715. [Google Scholar] [CrossRef]
- Vainio, O. Adaptive derivative estimation for delay-constrained acceleration measurement. IEEE Trans. Ind. Electron. 1999, 46, 933–935. [Google Scholar] [CrossRef]
- Lee, J.S.; Choi, S.; Kim, S.S.; Park, C.; Kim, Y.G. A mixed filtering approach for track condition monitoring using accelerometers on the axle box and bogie. IEEE Trans. Instrum. Meas. 2012, 61, 749–758. [Google Scholar] [CrossRef]
- Shafiullah, G.M.; Azad, S.A.; Shawkat Ali, A.B.M. Energyefficient wireless MAC protocols for railway monitoring applications. IEEE Trans. Intell. Transp. Syst. 2013, 14, 649–659. [Google Scholar] [CrossRef]
- Tanaka, H.; Furukawa, A. The estimation method of wheel load and lateral force using the axlebox acceleration. In Proceedings of the 8th World Congress on Railway Research, Seoul, Republic of Korea, 18 May 2008; pp. 1–10. [Google Scholar]
- Massel, A. Power spectrum analysis—Modern tool in the study of rail surface corrugations. NDT E Int. 1999, 32, 429–436. [Google Scholar] [CrossRef]
- Bocciolone, M.; Caprioli, A.; Cigada, A.; Collina, A. A measurement system for quick rail inspection and effective track maintenance strategy. Mech. Syst. Signal Proc. 2007, 21, 1242–1254. [Google Scholar] [CrossRef]
- Zoeteman, A. Life cycle cost analysis for managing rail infrastructure: Concept of a decision support system for railway design and maintenance. Eur. J. Transp. Infrastruct. Res. 2001, 1, 391–413. [Google Scholar]
- Caprioli, A.; Cigada, A.; Raveglia, D. Rail inspection in track maintenance: A benchmark between the wavelet approach and the more conventional Fourier analysis. Mech. Syst. Signal Proc. 2007, 21, 631–652. [Google Scholar] [CrossRef]
- Magel, E.; Tajaddini, A.; Trosino, M.; Kalousek, J. Traction, forces, wheel climb, and damage in high-speed railway operations. Wear 2008, 265, 1446–1451. [Google Scholar] [CrossRef]
- Gullers, P.; Andersson, L.; Lundén, R. High-frequency vertical wheel–rail contact forces—Field measurements and influence of track irregularities. Wear 2008, 265, 1472–1478. [Google Scholar] [CrossRef]
- Nielsen, J.C. High-frequency vertical wheel–rail contact forces-Validation of a prediction model by field testing. Wear 2008, 265, 1465–1471. [Google Scholar] [CrossRef]
- Delprete, C.; Rosso, C. An easy instrument and a methodology for the monitoring and the diagnosis of a rail. Mech. Syst. Signal Process. 2009, 23, 940–956. [Google Scholar] [CrossRef]
- Peng, D.; Jones, R. Modelling of the lock-in thermography process through finite element method for estimating the rail squat defects. Eng. Fail. Anal. 2013, 28, 275–288. [Google Scholar] [CrossRef]
- Thomas, H.; Heckel, T.; Hanspach, G. Advantage of a combined ultrasonic and eddy current examination for railway inspection trains. Insight-Non-Destruct. Test. Cond. Monit. 2007, 49, 341–344. [Google Scholar] [CrossRef]
- Berry, A.; Nejikovsky, B.; Gibert, X.; Tajaddini, A. High speed video inspection of joint bars using advanced image collection and processing techniques. In Proceedings of the 8th World Congress on Railway Research, Seoul, Republic of Korea, 18–22 May 2008; pp. 1–13. [Google Scholar]
- Li, Z.; Molodova, M. Method and Instrumentation for Detection of Rail Defects, Particular Rail top Defects. European Patent WO2011019273 (A1)-2011-02-17, 17 February 2011. [Google Scholar]
- Molodova, M.; Li, Z.; Dollevoet, R. Axle box acceleration: Measurement and simulation for detection of short track defects. Wear 2011, 271, 349–356. [Google Scholar] [CrossRef]
- Sunaga, Y.; Sano, I.; Ide, T. A practical use of axlebox acceleration to control the short wave track irregularities. Railw. Tech. Res. Inst. Q. Rep. 1997, 38, 1997. [Google Scholar]
- Molodova, M.; Li, Z.; Nunez, A.; Dollevoet, R. Automatic detection of squats in the railway infrastructures. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1980–1990. [Google Scholar] [CrossRef]
- Li, Z.; Molodova, M.; Nunez, A. Improvements in Axle Box Acceleration Measurements for the Detection of Light Squats in Railway Infrastructure. IEEE Trans. Intell. Elect. 2015, 62, 4385–4397. [Google Scholar] [CrossRef]
- Li, Z.; Dollevoet, R.; Molodova, M.; Zhao, X. Squat growth-Some observations and the validation of numerical predictions. Wear 2011, 271, 148–157. [Google Scholar] [CrossRef]
- UIC Code. Rail Defects, 4th ed.; International Union of Railways: Paris, France, 2002. [Google Scholar]
- Smulders, J. Management and research tackle rolling contact fatigue. Railw. Gaz. Int. 2003, 158, 439–442. [Google Scholar]
- Clayton, P.; Allery, M. Metallurgical aspects of surface damage problems in rails. Can. Metall. Q. 1982, 21, 31–46. [Google Scholar] [CrossRef]
- Rail Damages. The Blue Book of RailTrack; Rail Damages: London, UK, 2001. [Google Scholar]
- Weston, P.F.; Ling, C.S.; Goodman, C.J.; Roberts, C.; Li, P.; Goodall, R.M. Monitoring lateral track irregularity from in-service railway vehicles. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2007, 221, 89–100. [Google Scholar] [CrossRef]
- Weston, P.; Ling, C.; Roberts, C.; Goodman, C.; Li, P.; Goodall, R. Monitoring vertical track irregularity from in-service railway vehicles. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2007, 221, 75–88. [Google Scholar] [CrossRef]
- Remennikov, A.M.; Kaewunruen, S. A review of loading conditions for railway track structures due to train and track vertical interaction. Struct. Control Health Monit. 2008, 15, 207–234. [Google Scholar] [CrossRef]
- Daubechies, I. The wavelet transform, time–frequency localization and signal analysis. IEEE Trans. Inf. Theory 1990, 36, 961–1005. [Google Scholar] [CrossRef]
- Ovanesova, A.V.; Suárez, L.E. Applications of wavelet transforms to damage detection in frame structures. Eng. Struct. 2004, 26, 39–49. [Google Scholar] [CrossRef]
- Liew, K.M.; Wang, Q. Application of wavelet theory for crack identification in structures. J. Eng. Mech. 1998, 124, 152–157. [Google Scholar] [CrossRef]
- Wang, Q.; Deng, X. Damage detection with spatial wavelets. Int. J. Solids Struct. 1999, 36, 3443–3468. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, X.; Dollevoet, R.; Molodova, M. Differential wear and plastic deformation as a cause of squat at track local stiffness change combined with other track short defects. Veh. Syst. Dyn. 2008, 46, 237–246. [Google Scholar] [CrossRef]
- Bogdanski, S.; Lewicki, R. 3D model of entrapped liquid in rolling contact fatigue cracks in rails. Wear 2008, 265, 1356–1362. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ABA Implementation | Defects Studied | Frequency Range | Railway Network |
|---|---|---|---|
| Vertical ABA, 2 sensors, 80 km/h | Corrugation, wavelengths 0.055–0.080 m | Measured up to 2864 Hz | Polish State Railways Network [20] |
| Vertical ABA Lateral ABA | Corrugation lateral discontinuity, curve rail wear, damaged switches | Analysis between 25 Hz and 1246 Hz | Subway of Milan, Italy [21,22] |
| Vertical ABA Lateral ABA | Alignment, zones of large lateral force, track irregularities below 100 Hz | Analysis up to 100 Hz | Japanese high speed railways [23] |
| Vertical ABA Lateral ABA speed 300 km/h | Long wavelength irregularities, from 3 m to 200 m, both lateral and vertical irregularities | Analysis up to 2048 Hz | Korean train Express, high-speed line [17] |
| Location (m) | No. of Defects | No. of Predictions | No. of Detected Defects | No. of False Alarms | HR (%) | FA (%) |
|---|---|---|---|---|---|---|
| 0~1000 | 14 | 15 | 12 | 2 | 85.7 | 13.3 |
| 1000~2000 | 10 | 10 | 9 | 1 | 90.0 | 10.0 |
| 2000~3000 | 10 | 13 | 9 | 1 | 90.0 | 7.7 |
| Total | 34 | 38 | 30 | 4 | 88.2 | 10.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, H.; Park, J.; Park, K. Analysis of Axial Acceleration for the Detection of Rail Squats in High-Speed Railways. CivilEng 2023, 4, 1143-1156. https://doi.org/10.3390/civileng4040062
Cho H, Park J, Park K. Analysis of Axial Acceleration for the Detection of Rail Squats in High-Speed Railways. CivilEng. 2023; 4(4):1143-1156. https://doi.org/10.3390/civileng4040062
Chicago/Turabian StyleCho, Hojin, Jaehak Park, and Kyungsu Park. 2023. "Analysis of Axial Acceleration for the Detection of Rail Squats in High-Speed Railways" CivilEng 4, no. 4: 1143-1156. https://doi.org/10.3390/civileng4040062