1. Introduction
The earthquake-resisting design of a building structure involves the use of efficient computational tools to give an estimate of seismic demand, taking into account dynamic actions. Current codes of practice typically stipulate prescriptive design procedures employing force-based design principles for ensuring satisfactory performance of the structure in countering seismic actions. Traditionally, the linear elastic behaviour of the structure is assumed in analysis for determining internal forces sustained by the structural element. A force reduction factor (which is also known as the behaviour factor, performance factor or structural response factor) is then applied to the internal forces in the building to take into account the effects of ductility and overstrength. The main shortcoming of this (widely adopted) approach to structural design for seismic action is the inability of the force reduction factor to predict the seismic response behaviour of the structure accurately when excited beyond the limit of yield. The potential performance behaviour of the building is always in question should there be certain dominant atypical structural features in the load transmission path, despite the design being code compliant. In addressing this issue, most major codes of practice offer the option of nonlinear static or nonlinear time history (dynamic), analysis, both of which are based on fewer simplified assumptions [
1,
2,
3,
4]. The latter in particular is considered to provide better assurance of the safety and operability of the structure when subject to severe ground shaking [
5]. A nonlinear analysis procedure that employs site-specific information (in the form of response spectra and/or strong motion accelerograms) as input into the analysis would also serve the purpose of achieving better optimisation of the use of materials, saving construction costs [
6]. Despite the potential benefits, practising engineers tend to opt out of becoming involved in nonlinear dynamic analysis because of the effort and cost and the lack of guidance and information in support of the preparation of input into the software. The key motivation in the writing of this article is to facilitate structural designers to adopt more advanced analytical procedures through the introduction of modelling methodologies (such as macro-modelling), which consume less computational time and provide better support to guide input into the software.
Nonlinear seismic analysis of buildings may be either nonlinear static (pushover) analysis or nonlinear time history analysis (NLTHA). Pushover analysis, which is filled with limitations, can be used for calculating the resistant capacity and validation of the likely performance of the building [
3,
4]. It can be argued that the limitations of pushover analysis in modelling cyclic degradation can be overcome. However, the use of pushover analysis in dealing with a 3D dynamic response remains challenging. NLTHA gives predictions of the time history of drifts and internal forces, taking into account cyclic nonlinear material properties [
5]. Extending NLTHA from a 2D to a 3D response is more straightforward than achieving the same with pushover analysis. Despite the considerable benefits of NLTHA, the implementation of this type of analysis is mostly restricted to use in research because of the challenges posed to structural designers. The first challenge is to do with obtaining a large enough ensemble of strong motion accelerograms that are representative of the targeted site for a given intensity of seismic hazard. In addressing this challenge, methods of generating and sorting code-compliant accelerograms on bedrock and soil surfaces have been developed [
7,
8,
9,
10] and incorporated into “quakeadvice.org” [
11]. The second challenge is the high computational cost of modelling the whole building for the prediction of its dynamic behaviour throughout the duration of the response. The need to iterate over each time step in the analysis of a nonlinear system can result in a long execution time. The issue of a prolonged computation is compounded by the need to repeat the analysis with changing fineness of the meshing to demonstrate convergence [
12], and to have the procedure repeated to make full use of each record in the designated accelerogram ensemble. The writing of this paper was motivated by the need to address the second challenge as described.
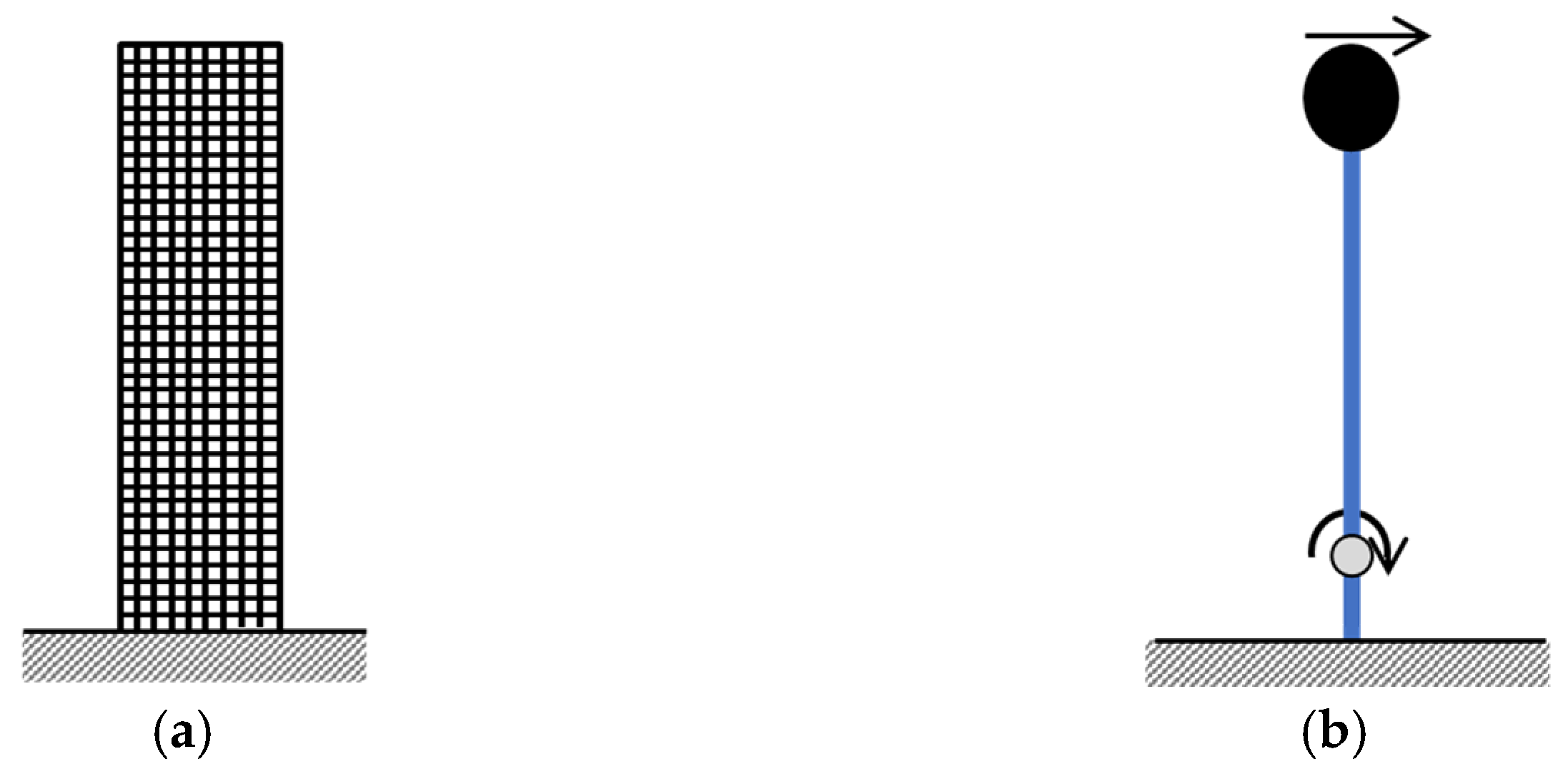
Recent analytical and experimental research has significantly improved our understanding of the inelastic behaviour of structural walls. Suitable analytical models in support of NLTHA have been developed. A macroscopic model of a structural wall providing lateral resistance to the building (abbreviated herein as a macro-model) has advantages over a conventional finite element model because of the much-reduced memory consumption and input information. The type of macro-model introduced herein is a vertical line element (a “stick”), which supports a lumped mass at the top. The stick has a hinge at the base to emulate the formation of a plastic hinge at the base of an RC wall. The proposed “rapid nonlinear time history analysis (RNLTHA)” procedure is performed on the model to give predictions of the time history response of the lumped mass. The nonlinear behaviour of the base (plastic) hinge is defined following a pre-determined moment–rotational relationship. In
Figure 1, an example of a stick model (
Figure 1b) for representing a shear wall is shown alongside the finite element model (
Figure 1a), where the difference between the number of degrees of freedom between the two models is presented. An outline of the operational details of RNLTHA is presented in
Section 2. Its application is demonstrated in
Section 4 in the form of a case study, and the results are compared with the sophisticated finite element analysis. For analysing the case study building, RNLTHA algorithms were implemented using MATLAB Version R2022a [
13], and SeismoStruct Version 2021 [
14] was used for conducting the finite element analysis.
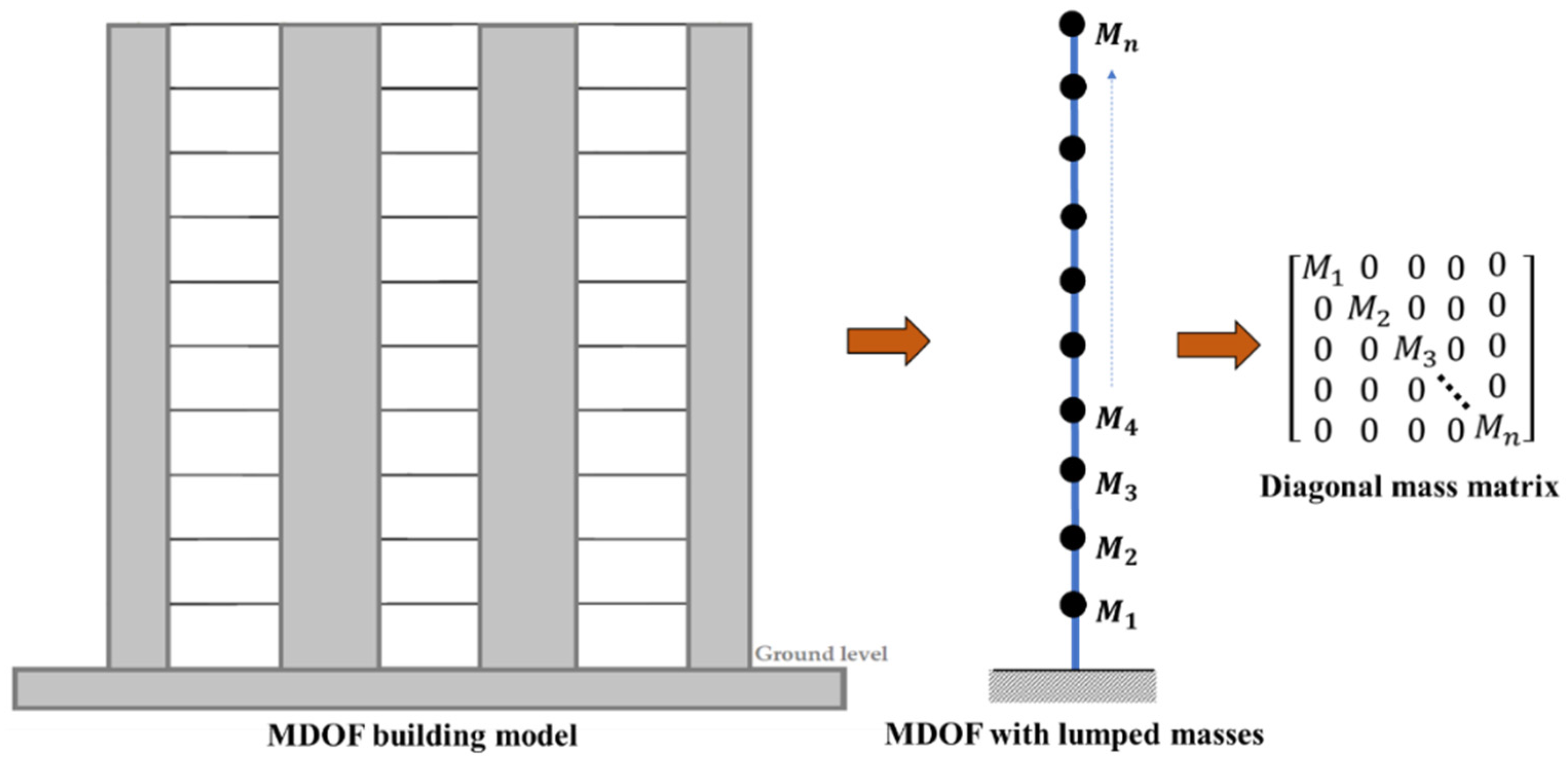
With tall buildings, the stick model as described would need to support multiple lumped masses (MDOF system). An outline of the operational details of RNLTHA when applied to this type of macro-model, including brief details of manipulation of the mass, stiffness and damping matrices, are presented in
Section 3. Further research is planned for the implementation of RNLTHA to analyse such structures.
2. Rapid Nonlinear Time History Analysis (RNLTHA)
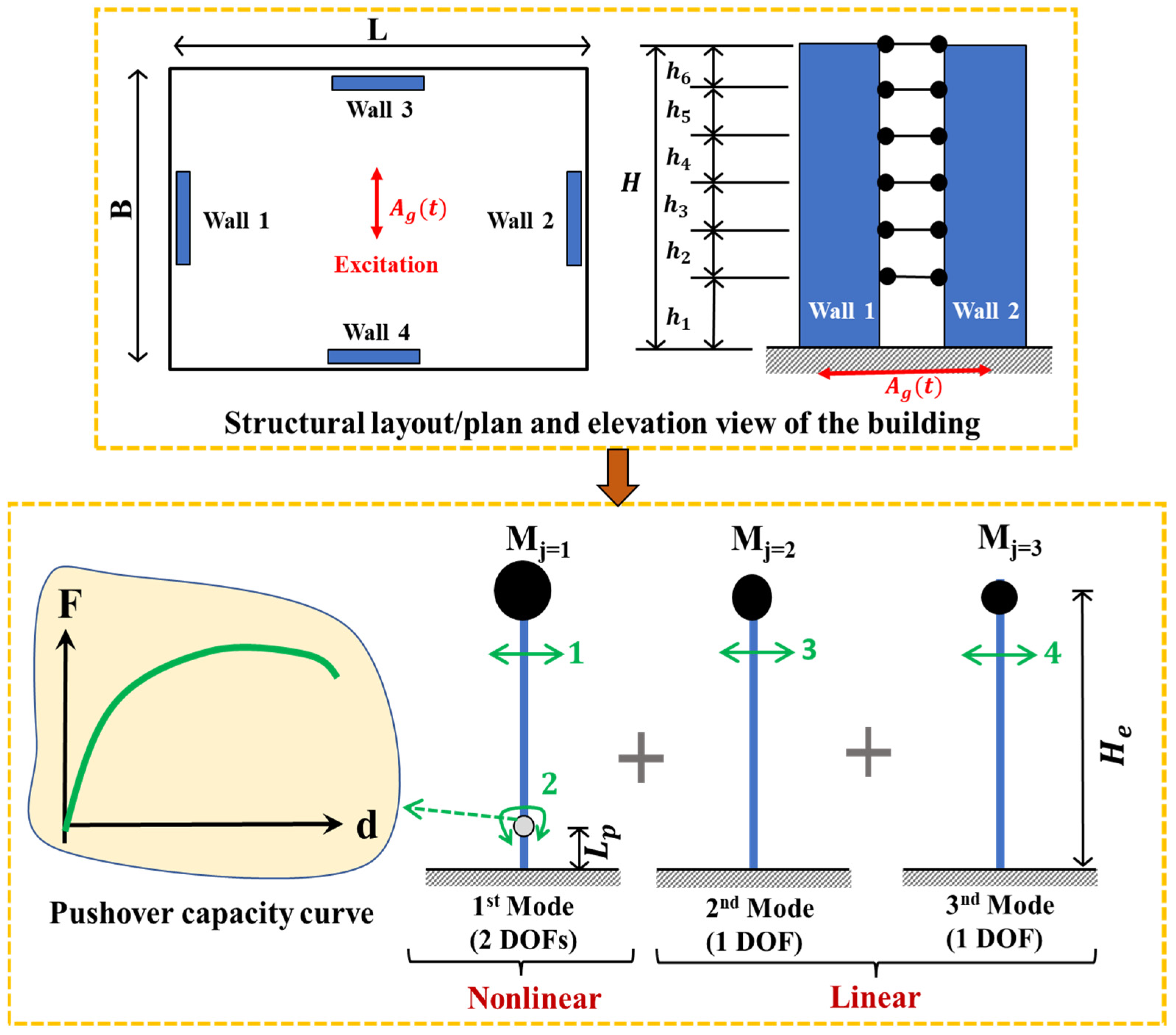
The fast-track version of nonlinear time history analysis, known as “rapid nonlinear time history analysis (RNLTHA)” for predicting the time history response of RC buildings, is based on a macroscopic model having a lumped mass at an effective height (
total height [
15], as shown in
Figure 2. In RNLTHA, the building is subject to modal analysis to resolve the linear elastic response components into multiple modes of vibration, as is performed conventionally [
3]. The nonlinear component is represented by the rotation of the “stick” about the hinge at the base to emulate the effects of plastic hinge formation. The inelastic response of the first mode and the elastic responses of the higher modes are combined to form the final solution. It is assumed that the inelastic action is mainly associated with the first mode while having a comparatively minor effect on the higher modes. This is supported by the findings presented in Refs. [
16,
17,
18], which recommends that the ductility in an RC wall structure is largely concentrated in its first mode (however, this is not valid for buildings with a frame system providing full or partial lateral support). With this macro model, thousands of degrees of freedom in a multi-storey building are reduced to four degrees of freedom (DOFs): two for the first mode, one for the second mode and one for the third mode. The use of this feature makes RNLTHA unique compared with other existing simplified methods. Attributed to simplicity, RNLTHA is memory inexpensive and transparent, and the savings in computational time and costs are considerable. Whilst saving computational time, analyses are repeated to cover every accelerogram in the ensemble. The time step interval is also kept sufficiently short (about 0.005 s) to give robust predictions.
The RNLTHA methodology introduced in this section is limited to the determination of the 2D time history responses: displacement and storey shear of a wall-type building that can be approximated by considering four DOFs covering three modes of vibration and the assumption of a plastic hinge formed at the base of the building. A more general modelling methodology that is without these restrictions is recommended for future study. The extended modelling methodology for 3D modelling of the dynamic response, taking into account torsional actions, is introduced in RNLTHA-3D in Ref. [
19].
The RNLTHA procedure involves three routines: (Routine 1) generation of two to six soil surface accelerograms for each reference period of 0.2 s, 0.5 s, 1 s and 2 s using the procedure introduced in Refs. [
10,
11], which has been implemented into ‘quakeadvice.org’; (Routine 2) dynamic modal analysis of the building to obtain the eigen solutions (presented in
Section 2.1); and (Routine 3) conducting fast-tracked nonlinear time history analysis of the stick model, which serves the purpose of determining the time history response for a given ground motion excitation. The breakdown of Routine 3 is presented below:
Step 1: Determine the modal mass (
), angular frequency (
) and displacement coefficient (
) for the first three modes of vibration (j = 1 to 3), as elaborated in
Section 2.1.
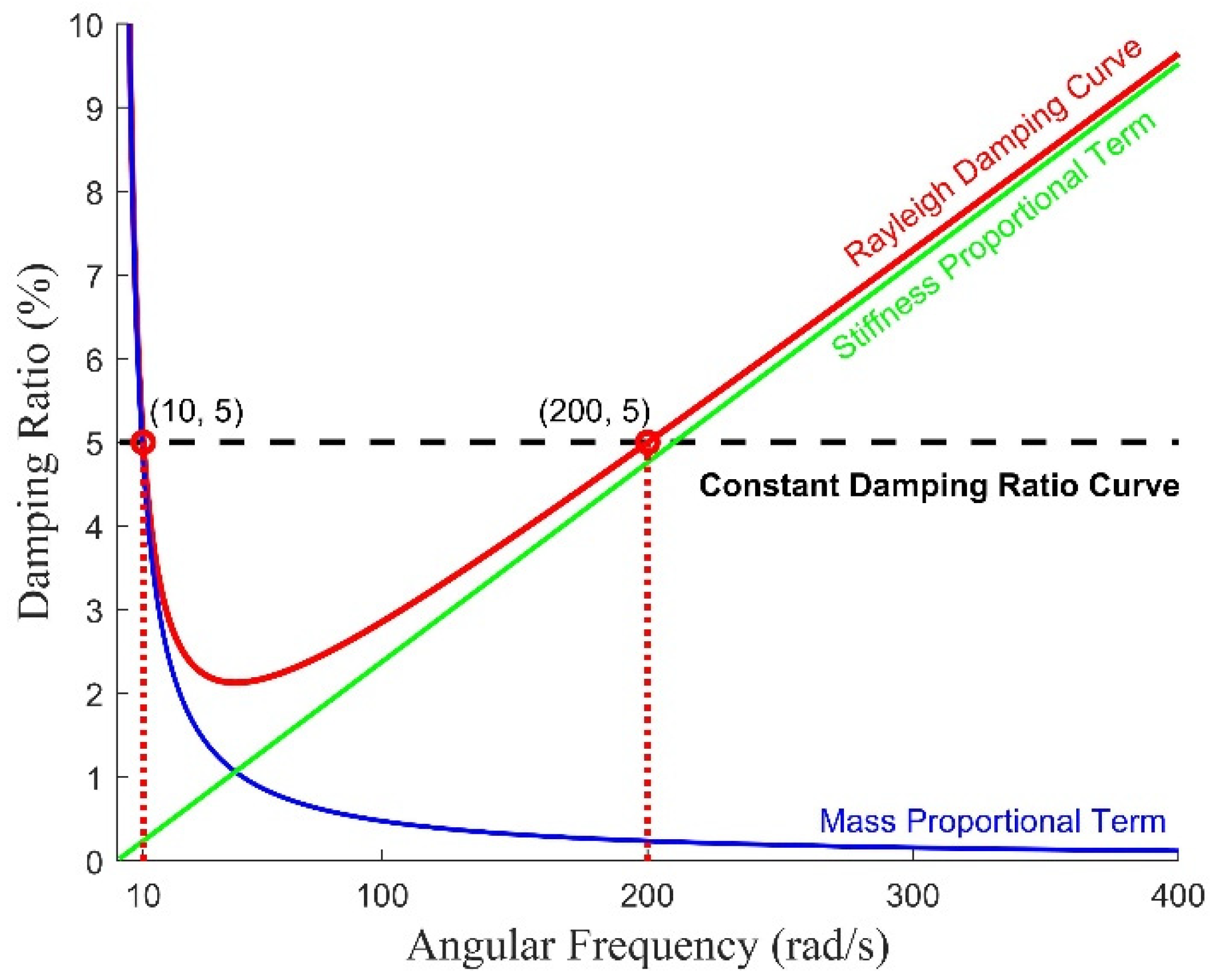
Step 2: Determine the elastic response of the SDOF for the first three modes of vibration for the current time step using Equations (A1)–(A4). The structural damping ratio (
) of 0.05 may be used for all vibration modes, as recommended by various texts and standards [
15,
20,
21].
Step 3: Determine the total inelastic force (
) and tangent stiffness ‘
’ corresponds to the first mode elastic displacement calculated in Step 2 using the force–displacement backbone curve and the hysteresis model, presented in
Section 2.2.
Step 4: For the first mode, determine the inelastic displacement, acceleration and velocity for the current time step using Equations (A1)–(A3) and Equation (A5) from
Appendix A.
Step 5: Multiply the inelastic first mode responses (Step 4) and elastic higher mode responses (Step 2) with the modal coefficients (Step 1) to determine the MDOF modal responses. The time history response is determined by performing the direct sum (linear addition) of contributions from the individual modes of vibration. With modal analysis, the total maximum response is calculated using the SRSS combination method, which deals with peak responses corresponding to each significant mode of vibration occurring at different instances [
22].
Step 6: Repeat Steps 2–5 for the full duration of each of the site-specific accelerograms. For each reference period group, calculate the design response by taking an arithmetic mean of the maximum responses.
The implementation of the above procedure is further demonstrated using a case study in
Section 4.
2.1. Modal Analyses of the Stick Model
Dynamic modal properties: modal masses ‘
’, angular frequency (
) and displacement coefficient (
) of the first three modes of vibration ‘j = 1 to j = 3’ can be determined either from eigen analysis (using computer software) or approximately calculated using empirical equations, given in [
6]. For the first three modes of vibration, the value of ‘
’ can be approximated as 70%, 17% and 7% of the total mass of the building; ‘
’ can be approximated as 1, 4 and 8 times of
; and the displacement coefficient at the roof level ‘
’ may be taken as 1.43, 0.64 and 0.31, as recommended in [
6,
23,
24] for a building having constant mass across the height and being supported by cantilever walls. The initial stiffness ‘
’ (stiffness at or before the development of the first crack) is obtained from
Section 2.2.
2.2. Inelastic Capacity and Hysteresis Modelling
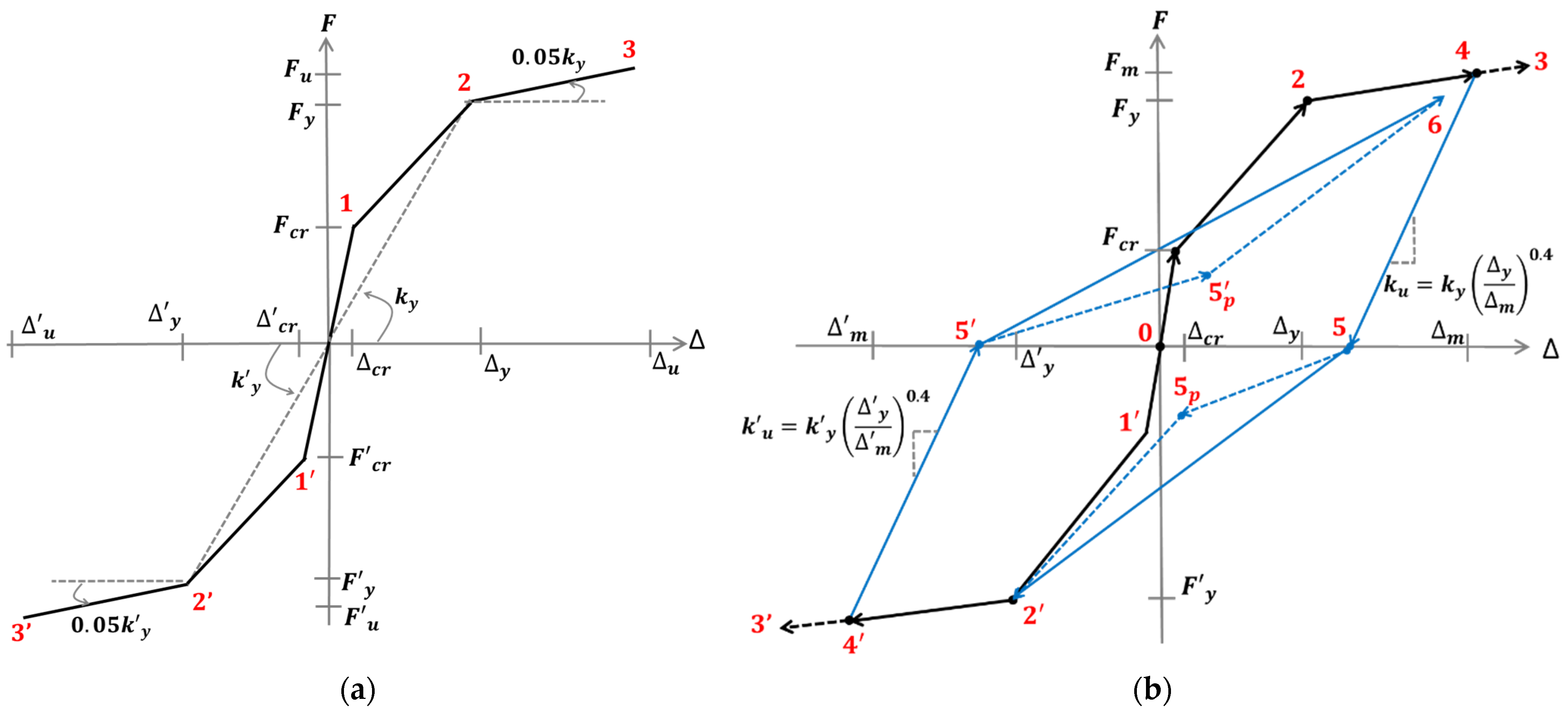
The inelastic capacity curve (referred herein as the pushover curve) that is used to model the nonlinear force–deformation behaviour of the plastic hinge is represented by the trilinear model at the system level (the whole building), as shown in
Figure 3. The pushover curve at the system level is determined by superposing the force capacities of each structural element (structural walls or frames). Take the building shown in
Figure 2 as an example. The capacity was derived by superposing the contributions of walls 1 and 2 whilst neglecting the out-of-plane contributions from walls 3 and 4. The simplified procedure, as outlined in
Appendix B, is used to determine the force and displacement capacities of each structural element at the formation of the first crack (
), the limit of the yield of the reinforcement (
) and the ultimate limit (
), where crushing of the concrete and crushing or buckling of the reinforcement occur, as represented, respectively, by points 1–3 (and 1′-3′ for reverse loading) of the trilinear backbone curve, as shown in
Figure 3a. The input information required for the generation of the trilinear curve is the vertical reinforcement ratio and its diameter, the gross moment of area of the structural wall or column, the mean in situ strength of concrete, the yield strength and ultimate strength of the reinforcement, and the axial load ratio. More details of the simplified procedure can be found in Ref. [
6].
The hysteresis model presented herein takes the trilinear form of the modified Takeda hysteresis rules [
25]. The cyclic curves, which consider the effects of strain hardening, stiffness degradation, pinching and damages, as shown in
Figure 3b, are achieved using the trilinear backbone curve, shown in
Figure 3a. The backbone curve (from points 0 to 4) is used for the first cycle of loading. Upon unloading, unloading stiffness of
is used first to reach zero force (point 5) and then it follows the backbone curve (points 2′ and 4′). On reloading, zero force (point 5′) is targeted prior to targeting the maximum deformation reached in the previous cycles (point 6 targeting at point 4). The alternative path with breakpoints 5
p and 5′
p is followed when pinching is of importance. In this study, the peak-oriented model as illustrated by the solid lines is adopted.
4. Case Study Analysis
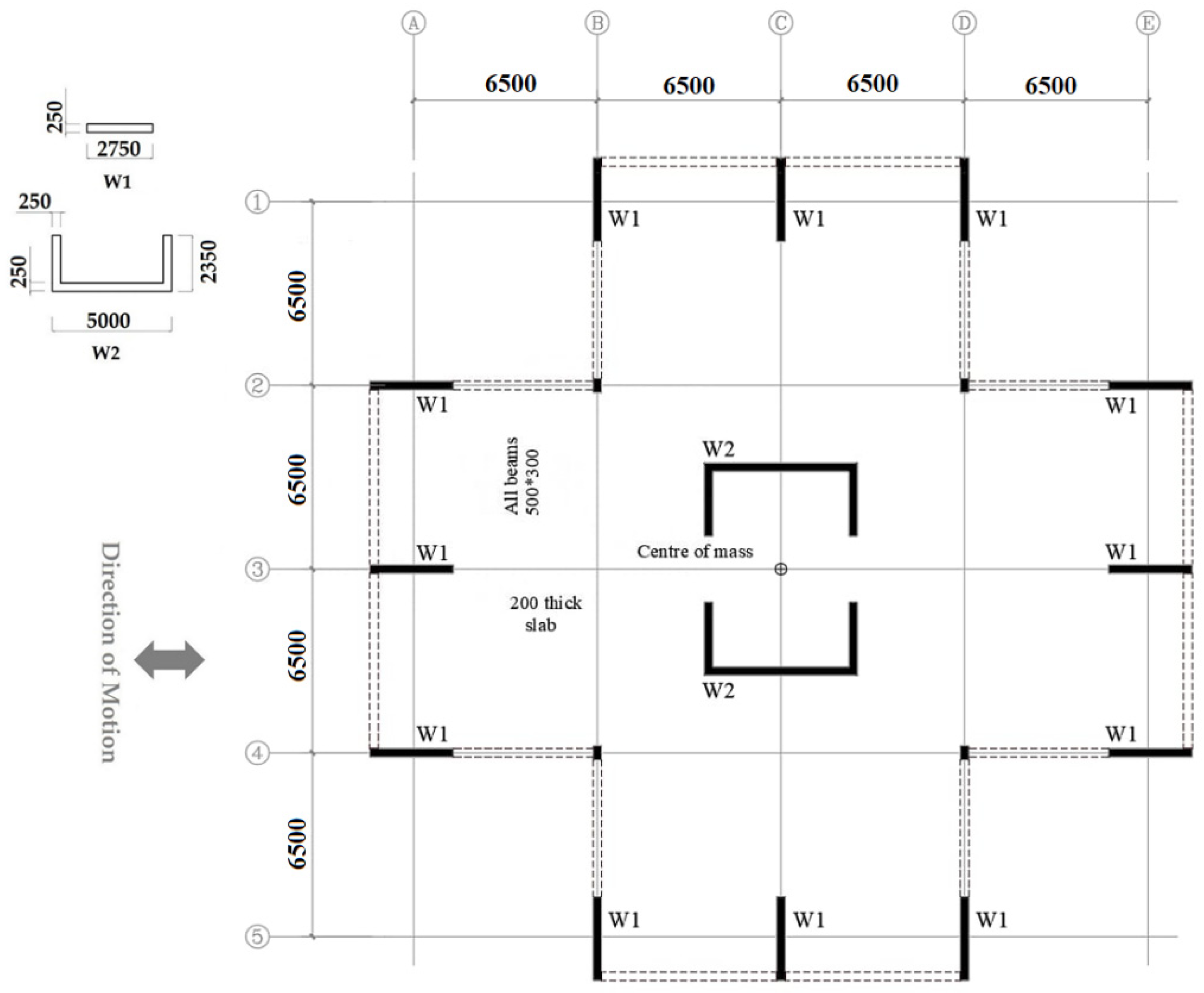
The application of the analytical procedure presented in this article is illustrated using a 10-storey case study building of 31 m in height, which has structural walls as the lateral load-resisting system. The floor plan and structural details of the building are shown in
Figure 7. A building of this typical height and structural system is selected so that the first mode dominant structure and elastic higher mode responses assumed in RNLTHA are valid. The seismic lumped mass (dead load + 0.3 × imposed load) of 420 tonnes for each floor is calculated for an imposed load of 2 kPa, superimposed dead load of 1 kPa and façade load of 1 kPa. Material properties of the structural walls (W1 and W2) forming the seismic load-resisting system are presented in
Table 1. Results from dynamic modal analysis performed in SeismoStruct Version 2021 [
14] are summarised in
Table 2. The first three modes of vibration have a combined effective modal mass participation of 92% of the total mass of the building.
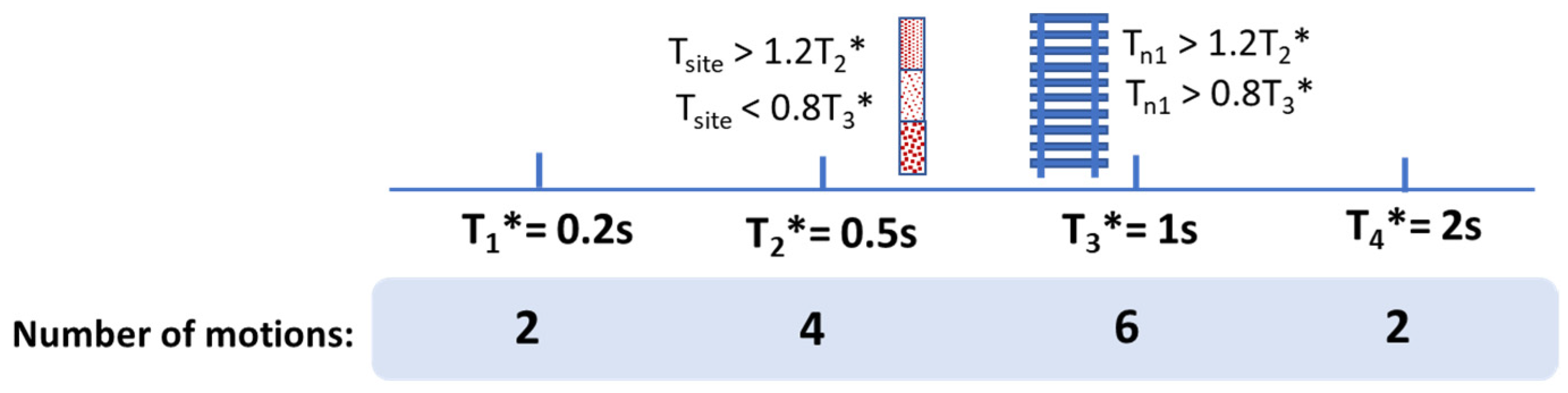
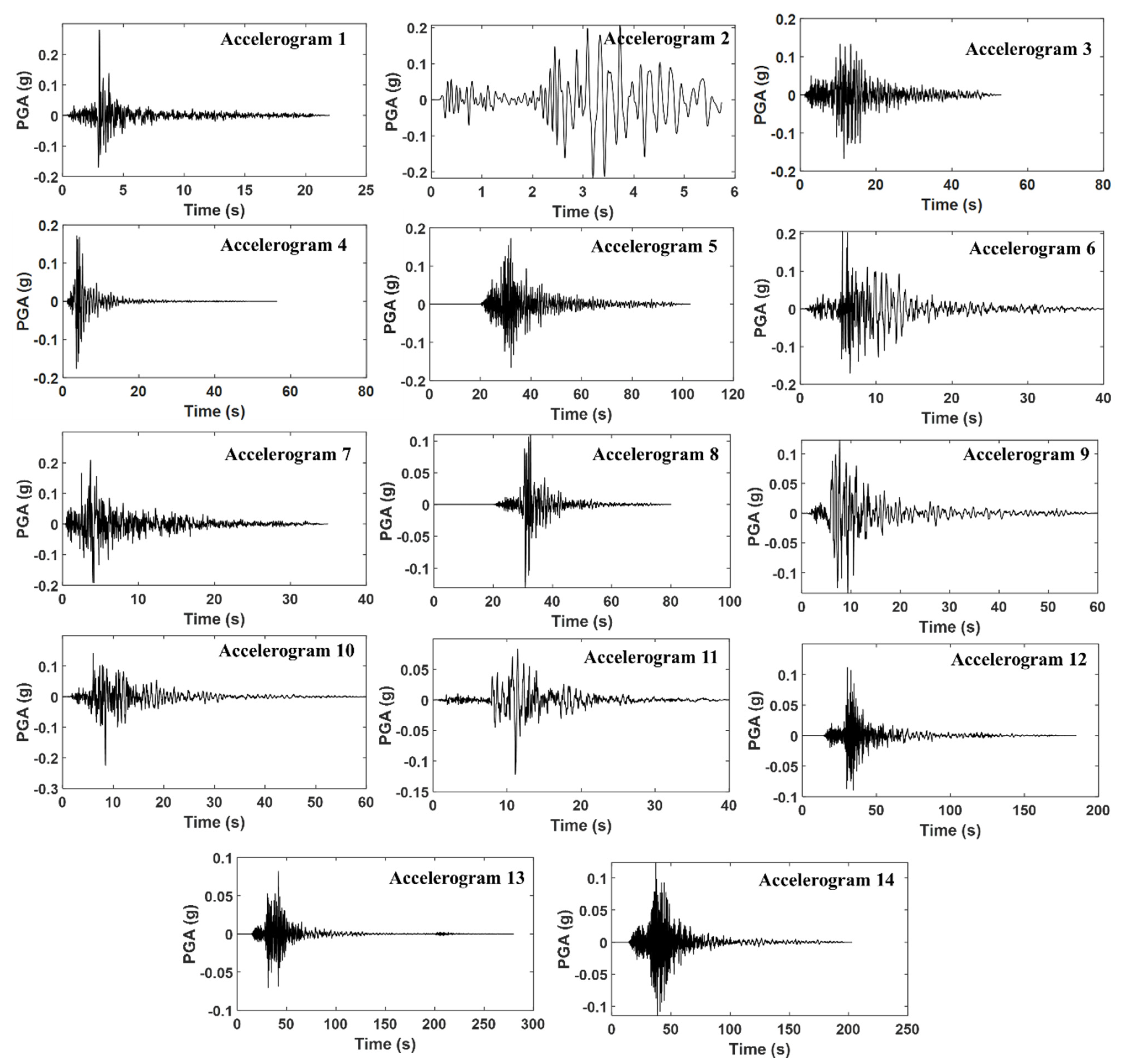
The design seismic hazard of 2% probability of exceedance in 50 years (2475 years return period earthquake), with a hazard value of 0.144 g, reverse/oblique fault, magnitude range of ±0.3
MW, Joyner–Boore distance range of ±30 km and
VS,30 of 1000 m/s was specified when retrieving fourteen earthquake records from the PEER database. The selection scheme, which is presented diagrammatically in
Figure 8 (showing the number of accelerograms for each reference period), was based on the recommendations in Ref. [
10]. The listing of the selected earthquake records is presented in
Table A1 in
Appendix C. The bore log presented in Ref. [
6] with a site period (
Tsite) of 0.61 s was subject to soil column site response analysis using the online tool available with free access at “quakeadvice.org” [
11]. Fourteen soil surface accelerograms, as shown in
Figure A1, were generated using the online tool.
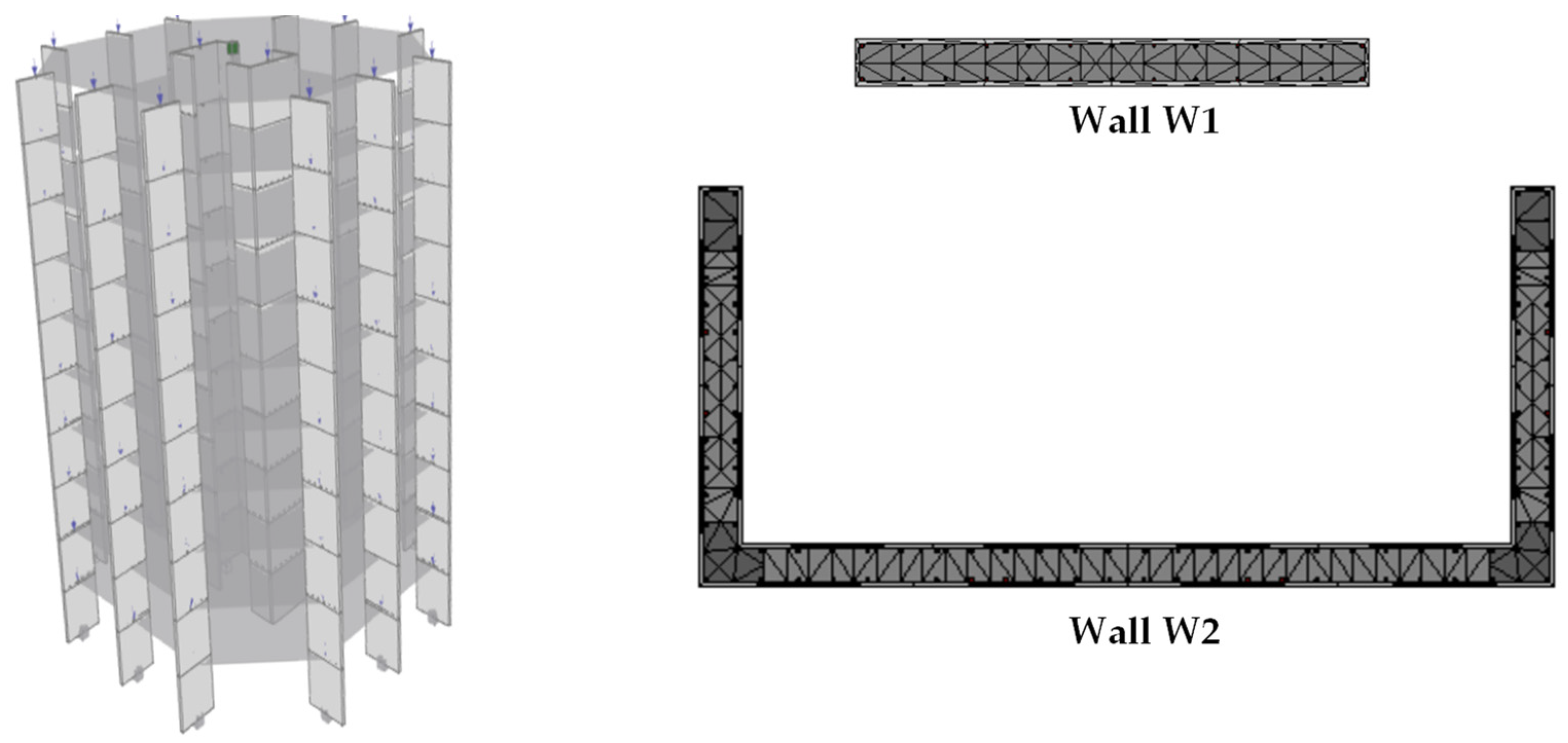
The proposed simplified nonlinear pushover analysis, as presented in
Section 2.2, was used to construct the force–deformation curve of the building. The strength capacity of the building structure as a whole was calculated (at each of the displacement capacities) by superposing contributions from the six rectangular walls (W1) and two C-shaped walls (W2), whereas the displacement limit was controlled by the wall having the lowest yield displacement (wall W2). The calculations of the force and displacement capacities are shown below. The equations for the calculation of displacement and force capacities are given in Equations (A6)–(A11) and the input parameters required are given in
Table 3. In
Table 3, the curvatures
,
and
the effective second moment of the section (
) and the plastic hinge length (
) are determined using Equations (A12)–(A16) and information from
Table 1.
Wall W1
At first crack: mm and
At yield point: mm and
At the ultimate point:
mm
Wall W2
At first crack: mm and
At yield point: mm and
At the ultimate point:
mm
Combined or system level (corresponding forces at the level of displacement are determined using linear interpolation):
At first crack of mm, kN
At yield point of mm, kN
At the ultimate point of mm, kN
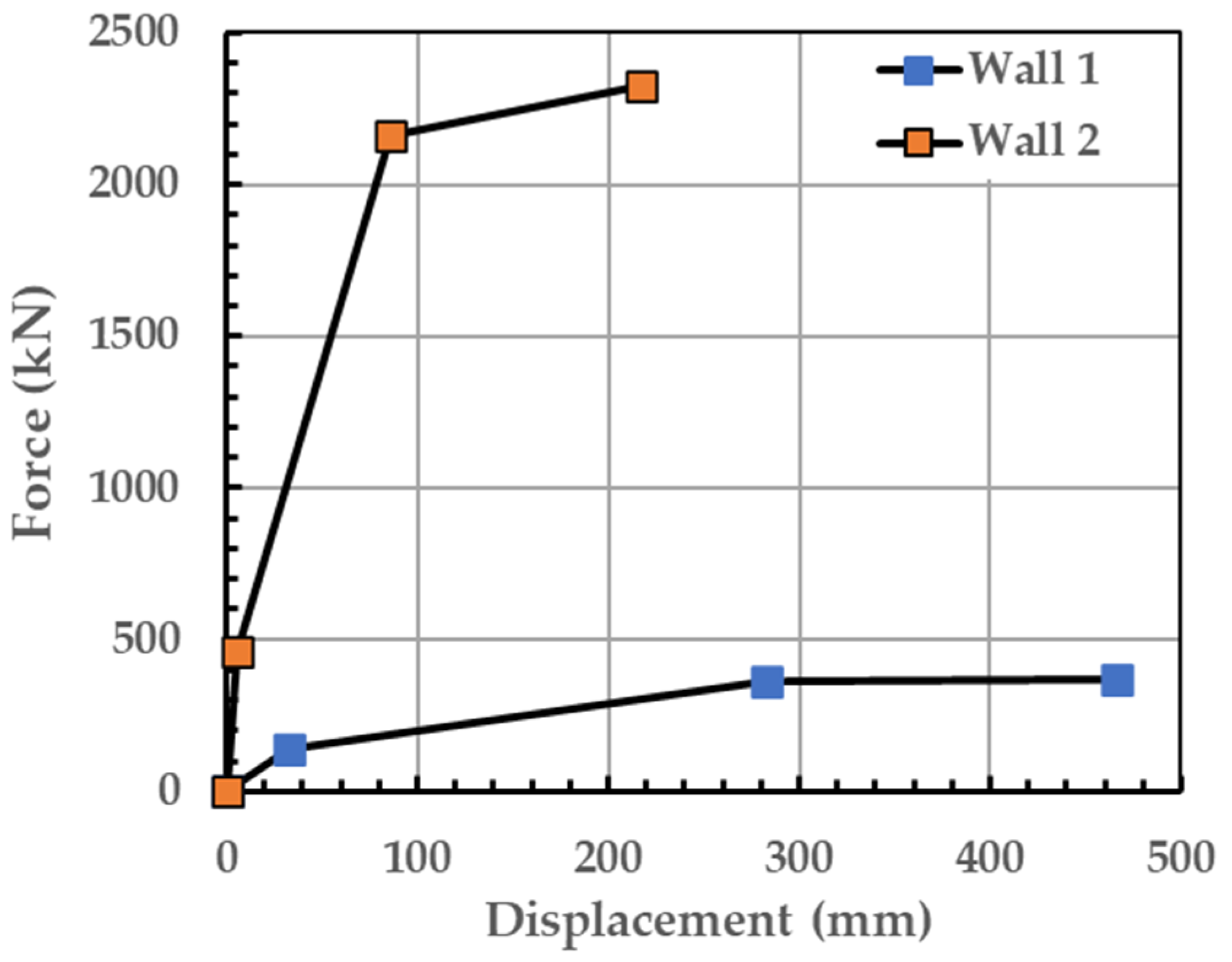
The trilinear force–displacement pushover curve obtained from the above calculations for wall W1 and wall W2 is presented in
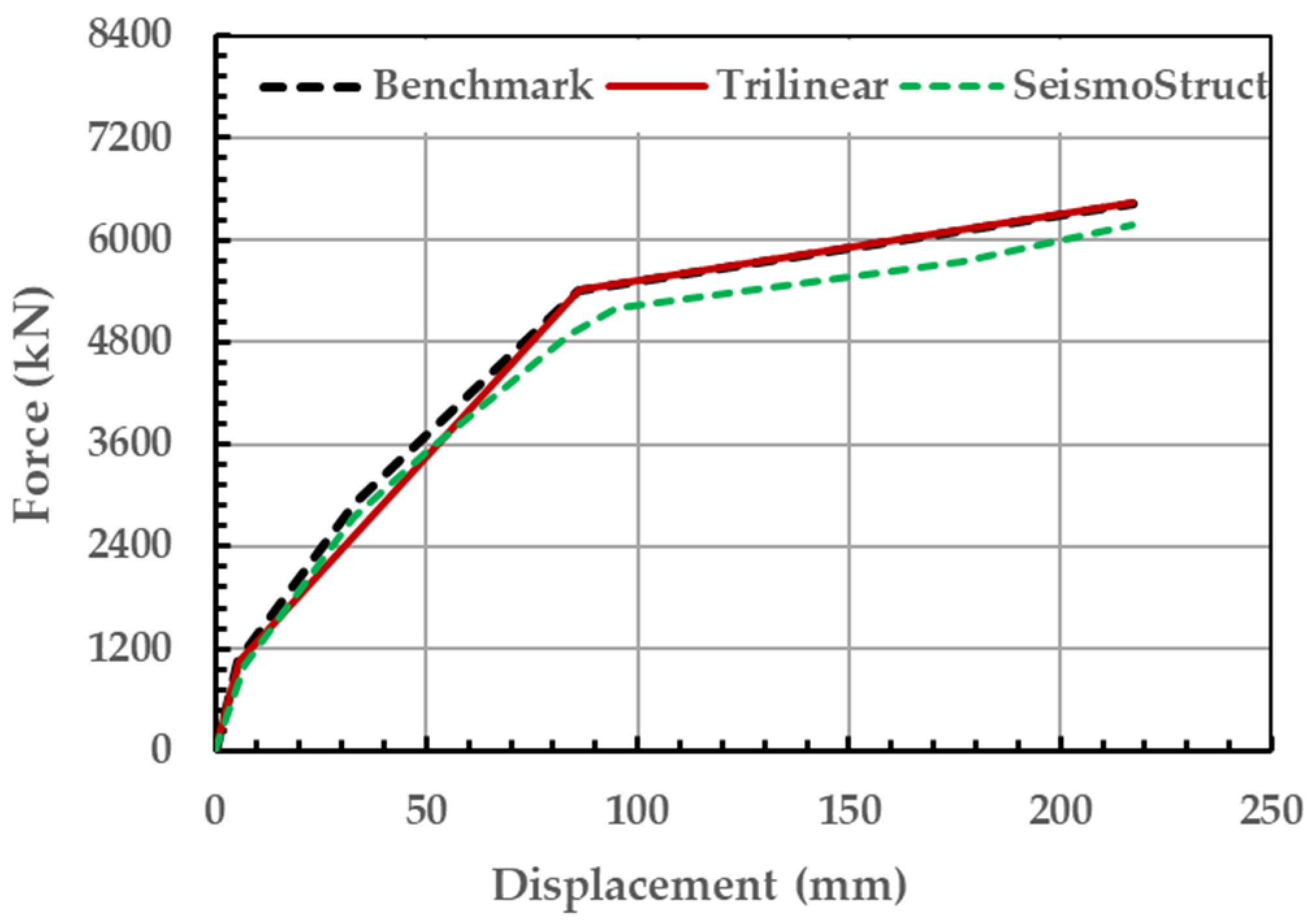
Figure 9. When the response from each wall is combined to determine the system pushover (i.e., using 6 × wall W1 and 2 × wall W2), referred to here as the ‘benchmark curve’, we no longer have a trilinear curve (refer to the black dashed line of
Figure 10). This is because the cracking, yield and ultimate points for the respective walls do not have the same respective displacement values for each point. However, we can use engineering judgement to create a new trilinear curve to approximate the combined pushover response of the building (refer to the red line in
Figure 10). Furthermore, the system-level pushover curve obtained from the pushover analysis of the building in SeismoStruct (refer to the green dashed line) was used to validate the simplified pushover curves. The comparison in
Figure 10 shows that the simplified capacity curves (both benchmark and trilinear) introduced here are consistent with the curves obtained from SeismoStruct, which uses the fibre-based modelling approach [
14].
The RNLTHA procedure of
Section 2 (with a time step of 0.005 s) was employed to determine the time history response of the SDOF stick model. For validation and comparison purposes, the building was modelled, and nonlinear dynamic time history analysis was performed using SeismoStruct [
14]. The building model in SeismoStruct consists of forced-based 3D frame elements featuring distributed inelasticity. The wall elements were interconnected at the floor levels by diaphragm actions. The cross-section of each wall was subdivided into fibres (each of which is 100 mm thick) across the depth and width of the wall cross-section, and five integration sections per storey, as shown in
Figure 11, were used. The adopted material model is the cyclic uniaxial model of Mander et al. [
34] for concrete and the Menegotto–Pinto model [
35] for reinforcements. The concrete and reinforcement strengths are listed in
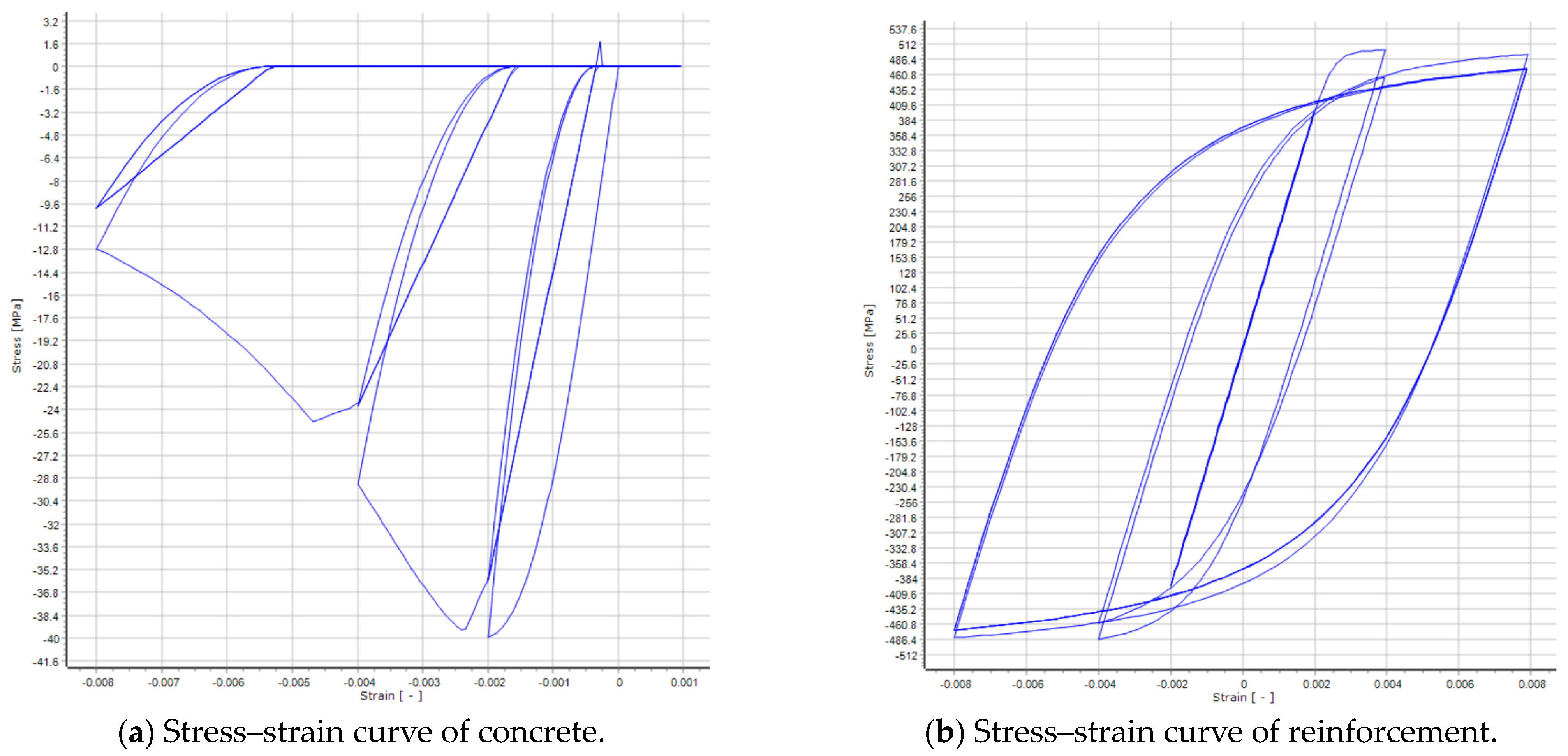
Table 2. Default values for strain hardening in steel and curve multipliers were adopted. The tensile strength of concrete is 2.5 MPa and the peak compressive strain is 0.0021. Material stress–strain curves used in the analyses can be found in
Appendix D (
Figure A2).
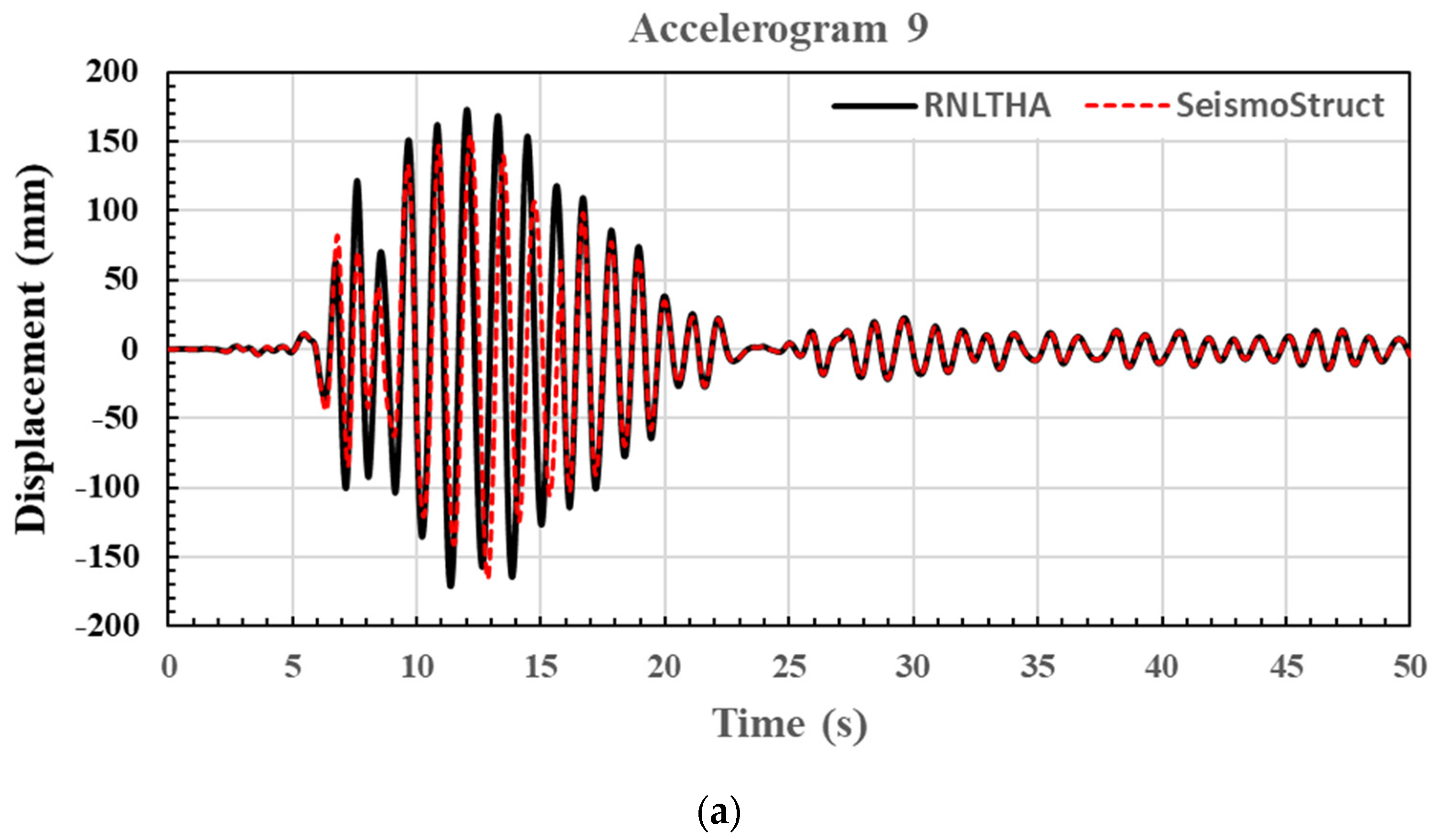
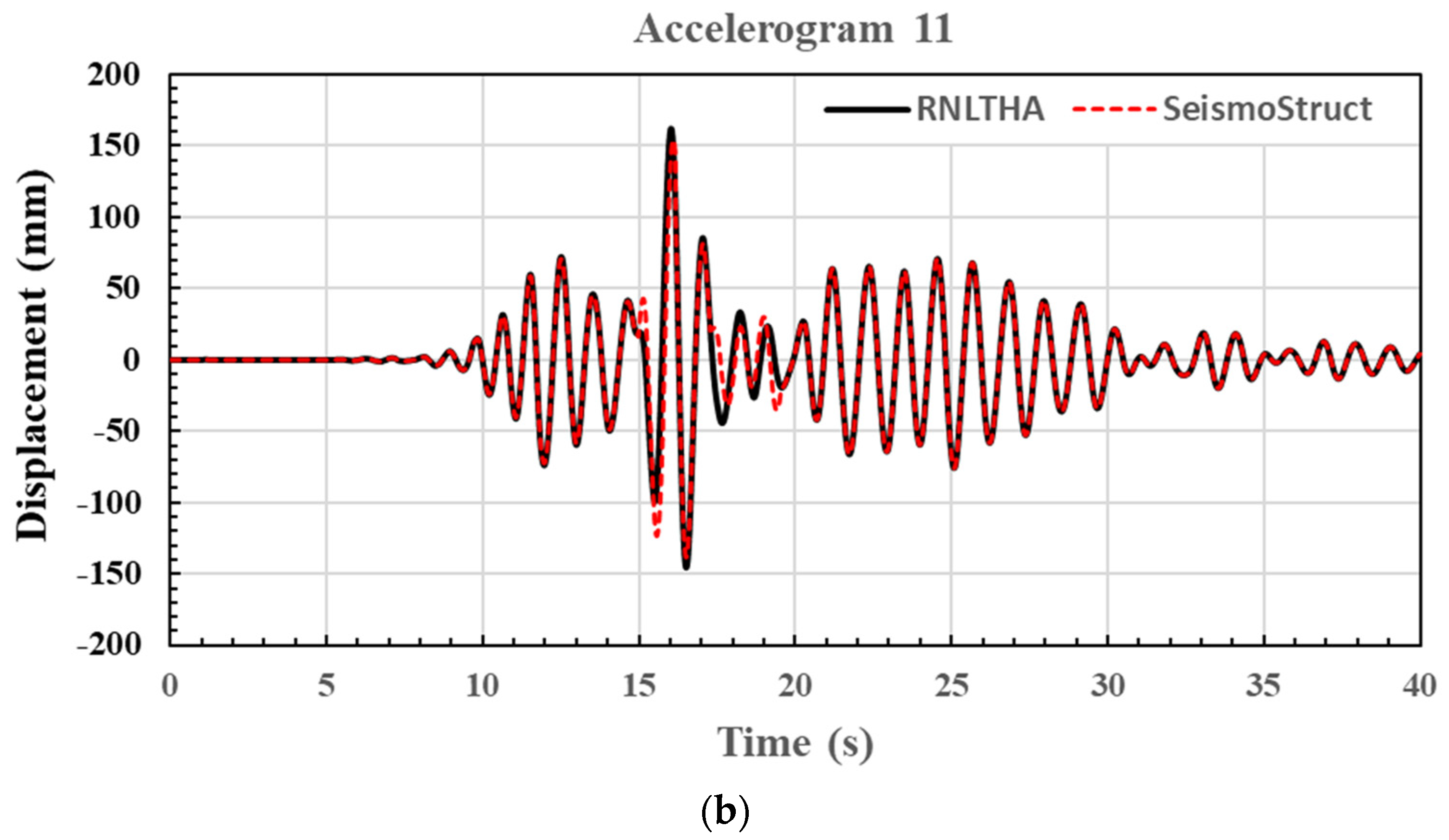
Comparisons of the displacement time history obtained from RNLTHA and SeismoStruct [
14] are shown in
Figure 12 for the soil surface accelerograms numbers 9 and 11, resulting in the highest peak displacement. Both accelerograms have a reference period (T*) of 1 s. From the comparison of displacement time history acquired from RNLTHA and SeismoStruct (
Figure 12), it is shown that RNLTHA predicted the displacements in the elastic range (displacements < yield displacement of 86 mm) more accurately compared with the inelastic displacements (displacements > 86 mm). This is expected because the difference between the capacities predicted by the two methods increases in the inelastic range (refer to
Figure 10). The treatment of the higher mode response as a purely elastic response may also have contributed to more discrepancies in the responses in the inelastic state.
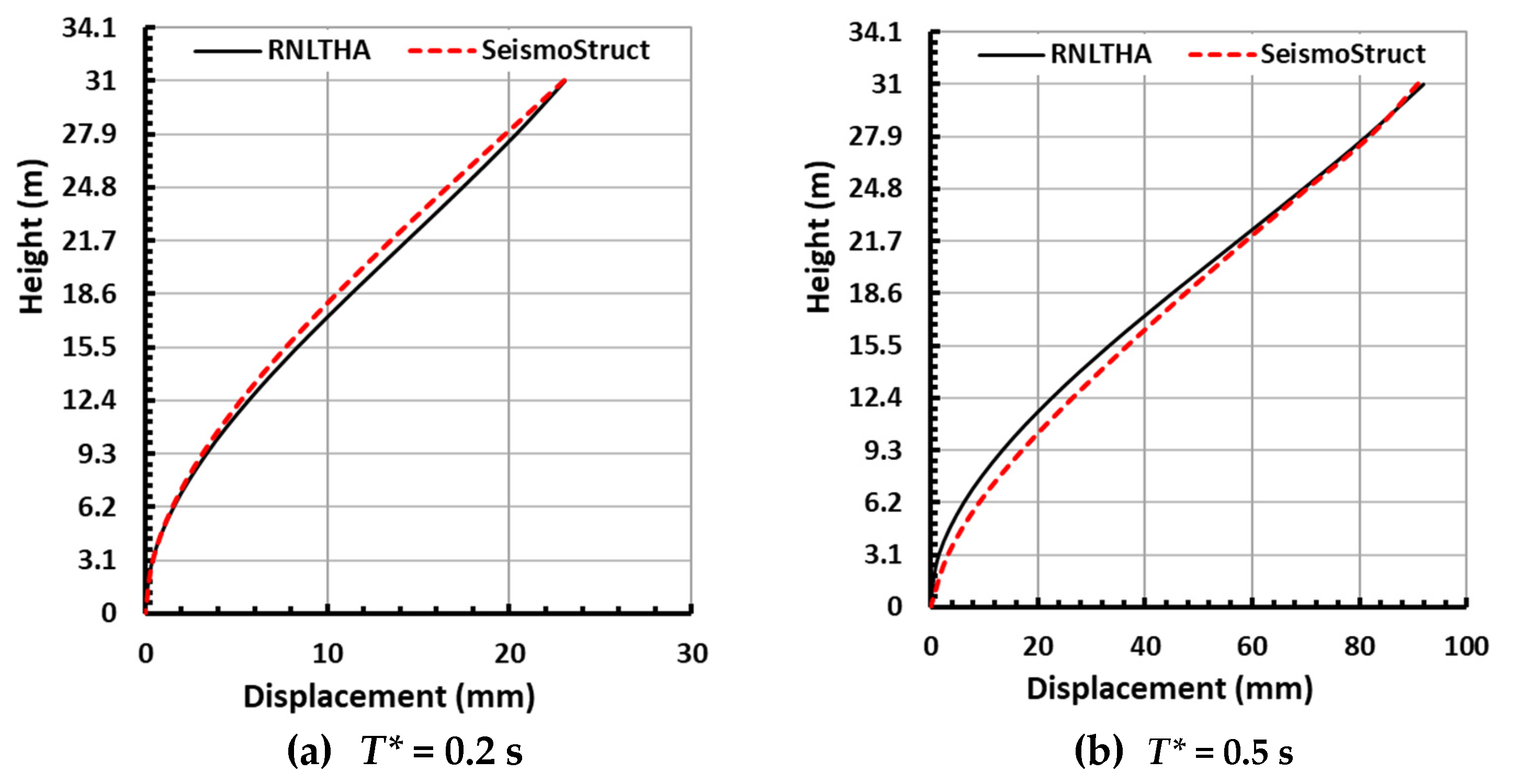
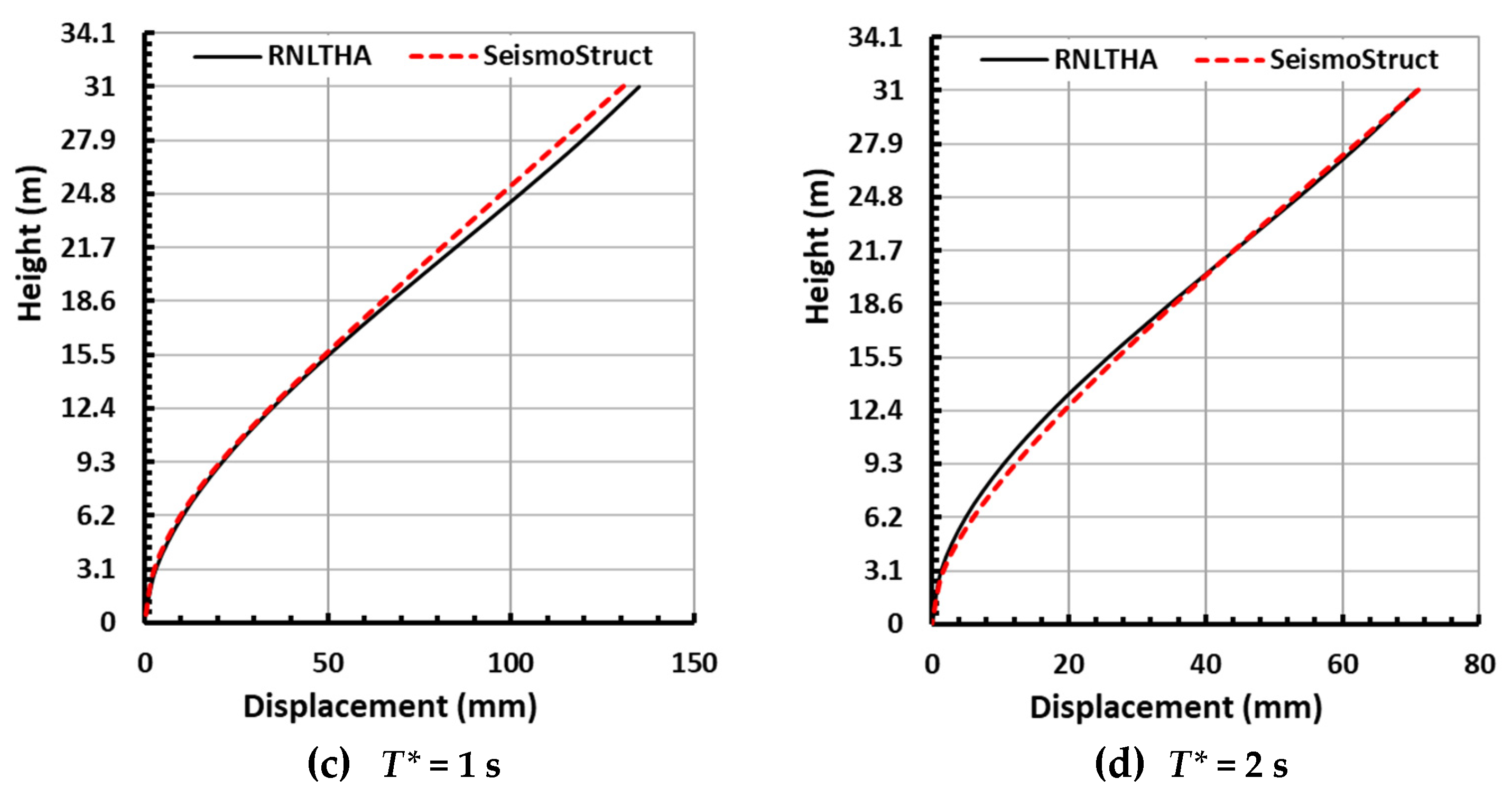
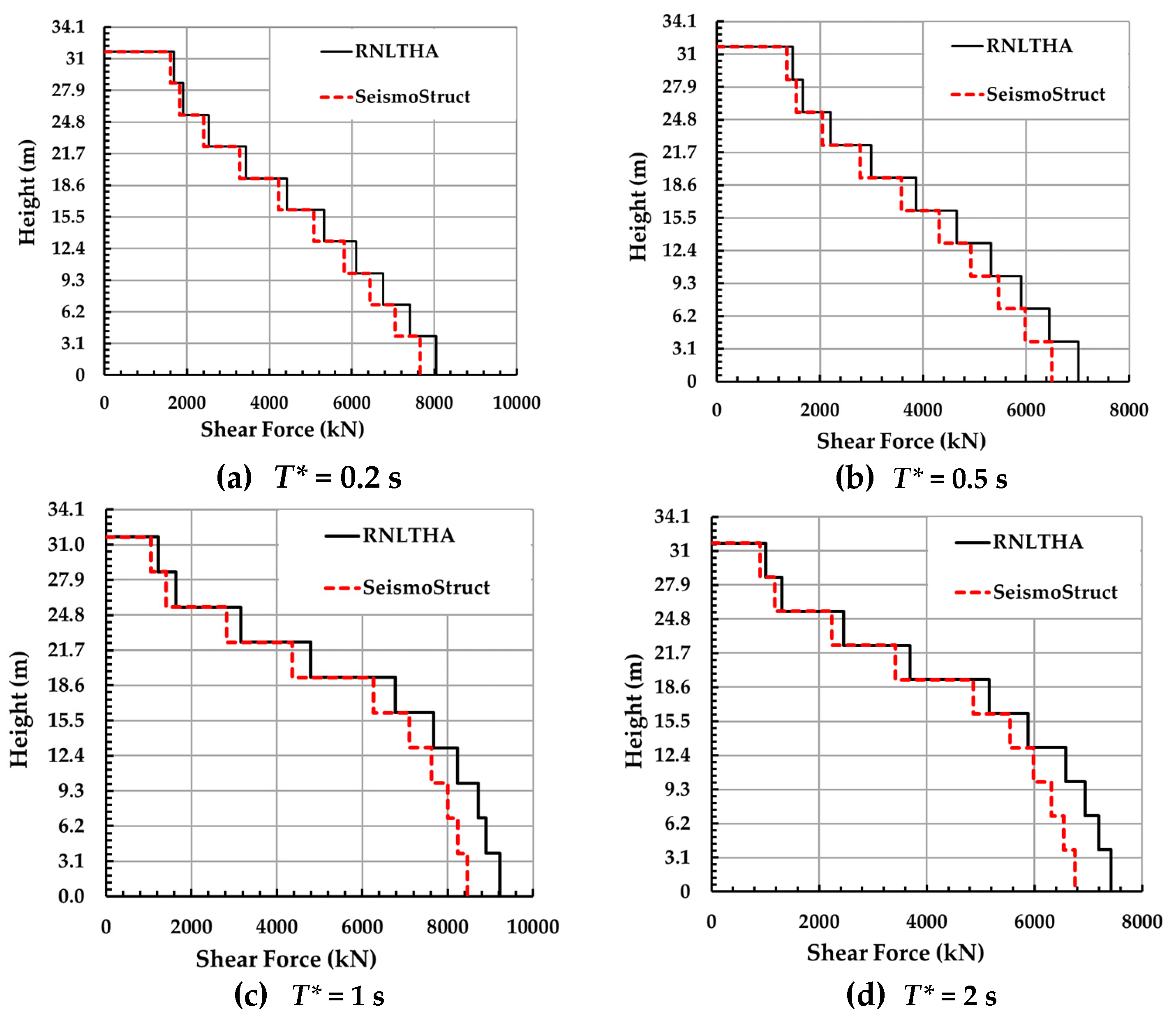
The displacement and storey shear profiles up the height of the building (for the case of the mean of the maximum response of each of the four reference periods) as obtained from the two methods are presented in
Figure 13 and
Figure 14, respectively. The difference between RNLTHA and SeismoStruct is within 10% for the roof displacement and base shear, and 20% for the storey shear. Given that RNLTHA reduces the computation time and costs by a significant amount, this difference is reasonable. The good agreement between the two sets of results for the case study building is mainly due to the facts that (1) the first mode of vibration dominates the response, (2) the lateral resistance of the building is contributed wholly by the structural walls, and (3) the response of the building as a whole is mainly within the elastic limit, except at the plastic hinges formed at the base of the structural walls.
The procedure proposed in this paper has been verified against commercial packages for a wall-type building model, where the gravity frame of the building is neglected. Depending on the structural configuration and sizing of elements, the gravity frame can affect the dynamic properties of the building and therefore cannot be neglected from the analysis model. The extension of RNLTHA to structures that are supported principally by frame actions or by a dual system of walls and frames is subjected to future study. Similarly, the trilinear pushover curve used in RNLTHA has been verified for buildings consisting of rectangular walls and walls of simple cross-sections, with a lower value of axial load ratio (typically less than 0.2). More case studies are to be investigated in future studies to check the suitability of the method in analysing buildings with complicated core walls, coupled walls and walls under the higher value of the axial load. Future research is also recommended for developing RNLTHA with a macroscopic model, with an MDOF system that can account more accurately for the compatibility forces that result from having slabs at all storeys.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















