
On Mechanical and Chaotic Problem Modeling and Numerical Simulation Using Electric Networks

Abstract
:1. Introduction
2. Design of the Network Models—The Electrical Components of the Model
2.1. Basic Circuits
2.2. Text Files
3. Applications and Simulation
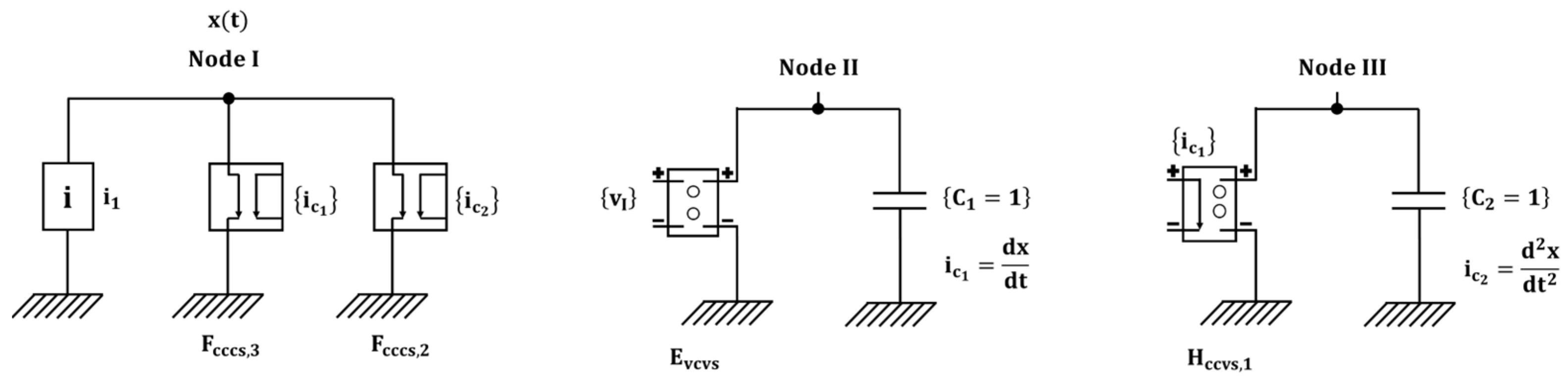
3.1. Mass Falling in Air or Viscous Fluid
- *Solution of ordinary differential equations
- *Governing equation: m × g − (γ) × () − m × a = 0.
- G1 I 0 VALUE = {m × g}
- Gcccs,3 I 0 VALUE = {γ × }
- Gcccs,2 0 I VALUE = {m × a}
- Gvccs,1 II 0 VALUE = {V(I)}
- C1 II 0 1
- Gcccs,1 III 0 VALUE = {iC1}
- C2 III 0 1
- Vtime 100 0 PWL(0,0 500,500)
- .TRAN 1 s 1.5 s 0 UIC
- .END
3.2. Crimped Bead Sliding on a Parabolic Shaped Wire
- *Solution of ordinary differential equations
- *Governing equation:
- Gcccs,2 I 0 VALUE = {}
- Gcccs,3 I 0 VALUE = {}
- Gcccs,4 I 0 VALUE = {}
- R 1 0 bo−1
- Gvcvs,1 II 0 VALUE = {V(I)}
- C1 II 0 1
- Gvccs,1 III 0 VALUE = {iC1}
- C2 III 0 1
- .TRAN 1 s 50 s 0 UIC
- .END
3.3. The van der Pol Oscillator
4. Discussions and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| acceleration (m2/s) | |
| constants | |
| capacitor | |
| constant current generator | |
| voltage controlled voltage source | |
| voltage controlled current source | |
| current controlled voltage source | |
| current controlled current source | |
| force (Newtons) | |
| gravitational acceleration (m2/s) | |
| current through a capacitor | |
| out current of a constant current generator () | |
| input current of a current controlled source | |
| output current of a controlled current source | |
| current through a resistor | |
| masa (Kg) | |
| weight (Newtons) | |
| resistor | |
| time (s) | |
| velocity (m/s) | |
| constant, initial velocity (m/s) | |
| voltage at the ends of a capacitor | |
| input voltage of a voltage-controlled source | |
| voltage at the ends of a resistor | |
| voltage at the output of a controlled voltage source | |
| solution to the equation (voltage at node I) | |
| spatial coordinates (m) | |
| constant, initial location (m) | |
| constant | |
| τ | period (s) |
| Subscripts | |
| ini | refers to initial values |
| max | refers to maximum values |
| time | refers to time-dependent sources |
| I, II… | nodes of the network model (I: main node) |
| 1, 2, 3 | defines each component of the same type in the network |
References
- Kirchhoff, S. Ueber den Durchgang eines elektrischen Stromes durch eine Ebene, insbesondere durch eine kreisförmige. Ann. Phys. 1845, 140, 497–514. [Google Scholar] [CrossRef]
- Kayan, C.F. An electrical geometrical analogue for complex heat flow. Trans. Am. Soc. Mech. Eng. 1945, 67, 713–716. [Google Scholar] [CrossRef]
- Arvinti, B.; Toader, D.; Vesa, D.; Costache, M. Experimental and Analytical Study of the Electric Potential using Lagrange Polynomials. In Proceedings of the 2020 International Symposium on Electronics and Telecommunications (ISETC), Timisoara, Romania, 5–6 November 2020; IEEE: New York, NY, USA, 2020. [Google Scholar]
- Paschkis, V.; Heisler, M.P. The Influence of Through-Metal on the Heat Loss From Insulated Walls. Trans. Am. Soc. Mech. Eng. 1944, 66, 653–661. [Google Scholar] [CrossRef]
- Karplus, W.J.; Soroka, W.W. Analog Methods: Computation and Simulation; McGraw-Hill: New York, NY, USA, 1959. [Google Scholar]
- Horno, J.; González-Caballero, F.; González-Fernández, C.F. A network thermodynamic method for numerical solution of the Nernst-Planck and Poisson equation system with application to ionic transport through membranes. Eur. Biophys. J. 1990, 17, 307–313. [Google Scholar] [CrossRef] [PubMed]
- López-García, J.J.; Moya, A.A.; Horno, J.; Delgado, A.; González-Caballero, F. A network model of the electrical double layer around a colloid particle. J. Colloid Interface Sci. 1996, 183, 124–130. [Google Scholar] [CrossRef]
- López-García, J.J.; Horno, J.; Delgado, A.V.; González-Caballero, F. Use of a network simulation method for the determination of the response of a colloidal suspension to a constant electric field. J. Phys. Chem. B 1999, 103, 11297–11307. [Google Scholar] [CrossRef]
- Chen, M.; Rosendahl, L.A.; Bach, I.; Condra, T.; Pedersen, J.K. Transient behavior study of thermoelectric generators through an electro-thermal model using SPICE. In Proceedings of the 2006 25th International Conference on Thermoelectrics, Vienna, Austria, 6–10 August 2006; IEEE: New York, NY, USA, 2006. [Google Scholar]
- Meca, A.S.; Alhama, F.; Fernandez, C.G. An efficient model for solving density driven groundwater flow problems based on the network simulation method. J. Hydrol. 2007, 339, 39–53. [Google Scholar] [CrossRef]
- Bég, O.A.; Zueco, J.; Bhargava, R.; Takhar, H.S. Magnetohydrodynamic convection flow from a sphere to a non-Darcian porous medium with heat generation or absorption effects: Network simulation. Int. J. Therm. Sci. 2009, 48, 913–921. [Google Scholar] [CrossRef]
- Serna, J.; Velasco, F.J.S.; Meca, A.S. Application of network simulation method to viscous flows: The nanofluid heated lid cavity under pulsating flow. Comput. Fluids 2014, 91, 10–20. [Google Scholar] [CrossRef]
- Cánovas, M.; Alhama, I.; Trigueros, E.; Alhama, F. Numerical simulation of Nusselt-Rayleigh correlation in Bénard cells. A solution based on the network simulation method. Int. J. Numer. Methods Heat Fluid Flow 2015, 25, 986–997. [Google Scholar] [CrossRef]
- Cánovas, M.; Alhama, I.; García, G.; Trigueros, E.; Alhama, F. Numerical simulation of density-driven flow and heat transport processes in porous media using the network method. Energies 2017, 10, 1359. [Google Scholar] [CrossRef]
- García-Ros, G.; Alhama, I.; Cánovas, M. An electrical analogy to compute general scenarios of soil consolidation. WSEAS Trans. Circuits Syst. 2017, 16, 131–140. [Google Scholar]
- Rossi, C.; Buccella, P.; Stefanucci, C.; Sallese, J.M. SPICE modeling of photoelectric effects in silicon with generalized devices. IEEE J. Electron Devices Soc. 2018, 6, 987–995. [Google Scholar] [CrossRef]
- Akram, S.; Bertilsson, K.; Siden, J. LTspice electro-thermal model of joule heating in high density polyethylene optical fiber microducts. Electronics 2019, 8, 1453. [Google Scholar] [CrossRef]
- Yaqoob, S.J.; Obed, A.A. Modeling, simulation and implementation of PV system by proteus based on two-diode model. J. Tech. 2019, 1, 39–51. [Google Scholar] [CrossRef]
- Garratón, M.C.; del Carmen García-Onsurbe, M.; Soto-Meca, A. A new Network Simulation Method for the characterization of delay differential equations. Ain Shams Eng. J. 2023, 14, 102066. [Google Scholar] [CrossRef]
- Lineykin, S.; Kuperman, A.; Sitbon, M. Estimation of the power of a thermoelectric harvester for low and ultra-low temperature gradients using a dimensional analysis method. In Proceedings of the 2023 IEEE 17th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Estonia, Tallinn, 14–16 June 2023; pp. 1–6. [Google Scholar]
- Sánchez-Pérez, J.F.; Marín-García, F.; Castro, E.; García-Ros, G.; Conesa, M.; Solano-Ramírez, J. Methodology for Solving Engineering Problems of Burgers–Huxley Coupled with Symmetric Boundary Conditions by Means of the Network Simulation Method. Symmetry 2023, 15, 1740. [Google Scholar] [CrossRef]
- Horno, J. Network Simulation Method; Research Signpost: Trivandrum, India, 2002. [Google Scholar]
- PSPICE. Version 6.0: Microsim Corporation. 20 Fairbanks, Irvine, California 92718. 1994. Available online: https://www.pspice.com (accessed on 23 December 2023).
- Nagel, L.W. SPICE2: A Computer Program to Simulate Semiconductor Circuits; College of Engineering, University of California: Berkeley, CA, USA, 1975. [Google Scholar]
- Wing, O. Classical Circuit Theory; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008; Volume 773. [Google Scholar]
- Guckenheimer, J. Dynamics of the van der Pol equation. IEEE Trans. Circuits Syst. 1980, 27, 983–989. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Year | Model | Problem |
|---|---|---|---|
| Kirchhoff [1] | 1845 | Electrolytic tank | Electrical currents on conductive surfaces |
| Paschkis and Heisler [4] | 1944 | Resistors and capacitors (laboratory) | Heat transfer |
| Kayan [2] | 1945 | Graphite paper | Heat fluxes |
| Karplus and Soroka [5] | 1959 | Resistors and capacitors (laboratory) | Heat and mass transfer |
| Horno et al. [6] | 1990 | Network method (Pspice) | Transport through membranes |
| López-García et al. [7] | 1996 | Network method (Pspice) | Colloidal systems |
| López-García et al. [8] | 1999 | Network method (Pspice) | Thermodynamic colloidal systems |
| Chen et al. [9] | 2006 | Pspice | Heat transfer |
| Meca et al. [10] | 2007 | Network method (Pspice) | Flow and salt transport |
| Bég et al. [11] | 2009 | Network method (Pspice) | Magnetohydrodynamic systems |
| Serna et al. [12] | 2014 | Network method (Pspice) | Lid cavity problem |
| Cánovas et al. [13] | 2015 | Network method (Pspice) | Flow and heat transport |
| Cánovas et al. [14] | 2017 | Network method (Pspice) | Density driven flow |
| García-Ros et al. [15] | 2017 | Network method (Pspice) | Soil consolidation systems |
| Rossi et al. [16] | 2018 | Network models | Semiconductors |
| Akram et al. [17] | 2019 | Network models (LTspice) | Thermal heating |
| Yaqoob and Obed [18] | 2019 | Semiconductor networks (Proteus) | Photovoltaic |
| Arvinti et al. [3] | 2020 | Electrical resistors (laboratory) | Electrostatic |
| Garratón et al. [19] | 2023 | Network models (Pspice) | Delay differential equations |
| Lineykin et al. [20] | 2023 | Electric analogy | Thermoelectric harvest equipment |
| Sánchez-Pérez et al. [21] | 2023 | Network method (Ngspice) | Burgers-Huxley problems |
| Component | Symbol | Constitutive Equation |
|---|---|---|
| Resistor |  | |
| Capacitor |  | |
| Constant voltage source |  | |
| Constant current source |  | |
| Voltage-controlled voltage-source |  | |
| Voltage-controlled current-source |  | |
| Current-controlled voltage-source |  | |
| Current-controlled current-source |  |
| Component | Sentence | |||
|---|---|---|---|---|
| Symbol | Connection Nodes | Value | ||
| Input | Output | |||
| Resistor | ||||
| Capacitor | ||||
| Constant voltage source | ||||
| Constant current source | ||||
| Voltage-controlled voltage-source | ||||
| Voltage-controlled current-source | ||||
| Current-controlled voltage-source | ||||
| Current-controlled current-source | ||||
| 4.00 | 4.00 | 4.00 | 1.00 | 2.00 | 3.00 | |
| 1.00 | 2.00 | 3.00 | 1.00 | 1.00 | 1.00 | |
| (m) | 5.00 | 5.00 | 5.00 | 5.00 | 5.00 | 5.00 |
| (m) | 100.00 | 100.00 | 100.00 | 25.00 | 50.00 | 75.00 |
| (m·s−1) | 22.53 | 31.77 | 39.00 | 22.53 | 22.53 | 22.53 |
| τ (s) | 8.15 | 6.48 | 5.28 | 4.76 | 6.57 | 7.96 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aráez, P.; Jiménez-Valera, J.A.; Alhama, I. On Mechanical and Chaotic Problem Modeling and Numerical Simulation Using Electric Networks. Modelling 2024, 5, 410-423. https://doi.org/10.3390/modelling5020022
Aráez P, Jiménez-Valera JA, Alhama I. On Mechanical and Chaotic Problem Modeling and Numerical Simulation Using Electric Networks. Modelling. 2024; 5(2):410-423. https://doi.org/10.3390/modelling5020022
Chicago/Turabian StyleAráez, Pedro, José Antonio Jiménez-Valera, and Iván Alhama. 2024. "On Mechanical and Chaotic Problem Modeling and Numerical Simulation Using Electric Networks" Modelling 5, no. 2: 410-423. https://doi.org/10.3390/modelling5020022