Derivation of the Optimal Solution for the Economic Production Quantity Model with Planned Shortages without Derivatives


Abstract
:1. Introduction
2. Description of the Problem
3. The Optimal Solution and Its Conditions
- 1.
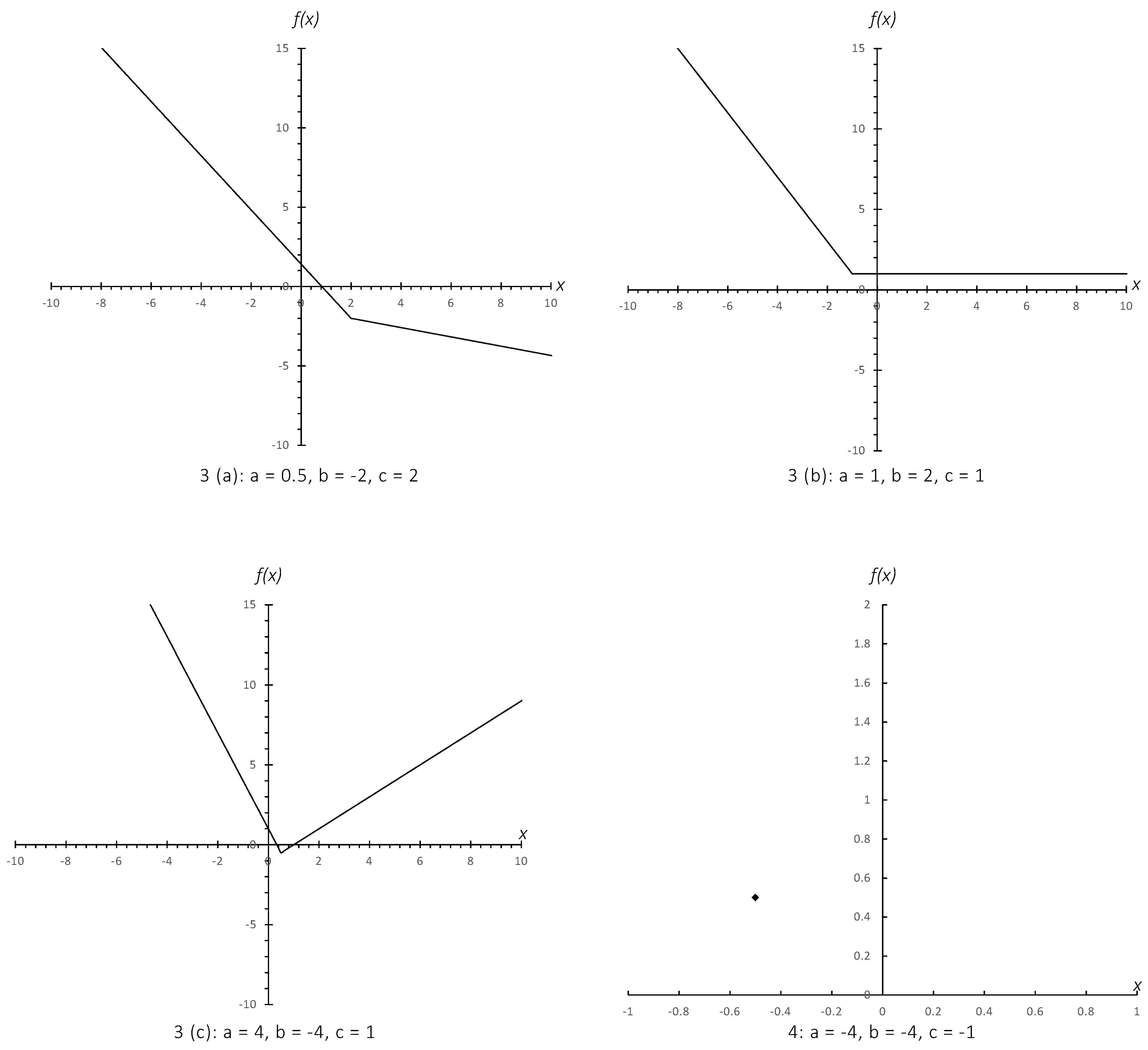
- When , and therefore Equation (8) is applicable. Then, the following is true for :
- (a)
- If and , for all x.
- (b)
- If and , consists of a single point at ; elsewhere.
- (c)
- If and , then is concave between the roots of ; elsewhere.
- (d)
- If , is concave where and elsewhere.
- 2.
- When and , has two real roots and between the roots. Therefore, we simply need to show that for and . for . Without loss of generality, we fix at the smaller root. We will now show that for every . Substituting the smaller root for in results in:Because , the following holds:Therefore, for and Equation (8) is applicable. Similarly, we can fix at the greater root and, using a similar process, we can prove that for and Equation (8) is again applicable. Consequently, when and , between the roots and concave outside of the roots.
- 3.
- When and , has, at most, one real root and for all x. When , is the only root. Again, without loss of generality, we fix at this root. Substituting the root for in results in:Because , the following holds:Therefore, for and the simplification is valid, and thus, is convex per Equation (8).
- 1.
- 2.
- 1.
- and
- 2.
- and
4. The Original Inventory Problem
5. Limitations and Further Research
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. General Properties of f(x)
- 1.
- if then and
- 2.
- if then and
- 3.
- if then
- 4.
- if and then and
- 5.
- if and then and
- 6.
- if then and
- 1.
- For , we simply evaluate Equation (A1) for , which results in ∞ as both the numerator and denominator are negative and they approach −2 and 0, respectively. For , we have to apply L’óspital’s rule because evaluating the integral results in indeterminacy:
- 2.
- 3.
- 4.
- If and , then because for . Additionally, because the denominator is positive.
- 5.
- If and , then because the denominator is negative. Additionally, because for .
- 6.
- If , then as as well as and therefore and .
- 1.
- If and , f(x) is strictly convex and . Furthermore:
- (a)
- If ,
- (b)
- If ,
- (c)
- If ,
- 2.
- If and , f(x) is neither convex nor concave and
- 3.
- If and , f(x) is convex but not strictly convex and (piecewise linear). Furthermore:
- (a)
- If ,
- (b)
- If ,
- (c)
- If ,
- 4.
- If and , f(x) is both convex and concave because is a single point; , and for , and for
- 5.
- If , is strictly concave and and furthermore:
- (a)
- if , for and for and
- (b)
- if , for , and for and
- 6.
- If , is strictly concave and furthermore:
- (a)
- if , , and for and for
- (b)
- if , , and for and for
- 1.
- By Lemma 1, is strictly convex when and . Furthermore, for all and therefore .
- (a)
- If , because is strictly monotone decreasing and by Lemma A1 (2).
- (b)
- If , because is strictly monotone decreasing and by Lemma A1 (1).
- (c)
- If , by Lemma 2.
- 2.
- If and , for all and has no real roots. Therefore, is neither convex nor concave and
- 3.
- If and , is convex but not strictly convex by Lemma 1. Because for , and can be expressed as a perfect square: . Therefore, can be expressed as follows:which is obviously piecewise linear with a corner point of and . Furthermore:
- (a)
- If , because is strictly monotone decreasing and .
- (b)
- If , , which means infinitely many optimal solutions along the horizontal line of .
- (c)
- If , the unique minimum occurs at the corner point: .
- 4.
- If , is convex but not strictly convex by Lemma 1; and if , has a single real root and for all , . Therefore, and for , and for
- 5.
- If , is strictly concave by Lemma 1 and has two real roots. Therefore, .
- (a)
- if , between its roots. Therefore, for , and for and .
- (b)
- if , outside the interval between the two roots. Therefore, for , and for and .
- 6.
- If , is strictly concave by Lemma 1 and has a single real root .
- (a)
- if , for all . Therefore, for and for . In addition, because .
- (b)
- if , , for all . Therefore, for and for . In addition, because is strictly monotone decreasing.



References
- Harris, F. How Many Parts to Make At Once. Fact. Mag. Manag. 1913, 10, 135ߝ136, 152. [Google Scholar] [CrossRef]
- Grubbström, R.W.; Erdem, A. The EOQ with backlogging derived without derivatives. Int. J. Prod. Econ. 1999, 59, 529–530. [Google Scholar] [CrossRef]
- Cárdenas-Barrón, L.E. The economic production quantity (EPQ) with shortage derived algebraically. Int. J. Prod. Econ. 2001, 70, 289–292. [Google Scholar] [CrossRef]
- Wee, H.; Chung, S.; Yang, P. Technical Note A Modified EOQ Model with Temporary Sale Price Derived without Derivatives. Eng. Econ. 2003, 48, 190–195. [Google Scholar] [CrossRef]
- Huang, Y.F. The deterministic inventory models with shortage and defective items derived without derivatives. J. Stat. Manag. Syst. 2003, 6, 171–180. [Google Scholar] [CrossRef]
- Ronald, R.; Yang, G.K.; Chu, P. Technical note: The EOQ and EPQ models with shortages derived without derivatives. Int. J. Prod. Econ. 2004, 92, 197–200. [Google Scholar] [CrossRef]
- Chang, S.J.; Chuang, J.P.; Chen, H.J. Short comments on technical note—The EOQ and EPQ models with shortages derived without derivatives. Int. J. Prod. Econ. 2005, 97, 241–243. [Google Scholar] [CrossRef]
- Sphicas, G.P. EOQ and EPQ with linear and fixed backorder costs: Two cases identified and models analyzed without calculus. Int. J. Prod. Econ. 2006, 100, 59–64. [Google Scholar] [CrossRef]
- Omar, M.; Zubir, M.B.; Moin, N. An alternative approach to analyze economic ordering quantity and economic production quantity inventory problems using the completing the square method. Comput. Ind. Eng. 2010, 59, 362–364. [Google Scholar] [CrossRef]
- Cárdenas-Barrón, L.E. Optimal manufacturing batch size with rework in a single-stage production system–-A simple derivation. Comput. Ind. Eng. 2008, 55, 758–765. [Google Scholar] [CrossRef]
- Wee, H.M.; Chung, C.J. A note on the economic lot size of the integrated vendor–-Buyer inventory system derived without derivatives. Eur. J. Oper. Res. 2007, 177, 1289–1293. [Google Scholar] [CrossRef]
- Chung, K.J. “A note on the economic lot size of the integrated vendor–-buyer inventory system derived without derivatives”: A comment. Eur. J. Oper. Res. 2009, 198, 979–982. [Google Scholar] [CrossRef]
- Teng, J.T. A simple method to compute economic order quantities. Eur. J. Oper. Res. 2009, 198, 351–353. [Google Scholar] [CrossRef]
- Leung, K.N.F. Some comments on “A simple method to compute economic order quantities”. Eur. J. Oper. Res. 2010, 201, 960–961. [Google Scholar] [CrossRef]
- Cárdenas-Barrón, L.E. A simple method to compute economic order quantities: Some observations. Appl. Math. Model. 2010, 34, 1684–1688. [Google Scholar] [CrossRef] [Green Version]
- Cárdenas-Barrón, L.E. An easy method to derive EOQ and EPQ inventory models with backorders. Comput. Math. Appl. 2010, 59, 948–952. [Google Scholar] [CrossRef] [Green Version]
- Ouyang, L.Y.; Chang, C.T.; Shum, P. The EOQ with defective items and partially permissible delay in payments linked to order quantity derived algebraically. Cent. Eur. J. Oper. Res. 2012, 20, 141–160. [Google Scholar] [CrossRef]
- Cárdenas-Barrón, L.E.; Wee, H.M.; Blos, M.F. Solving the vendor–-Buyer integrated inventory system with arithmetic–-Geometric inequality. Math. Comput. Model. 2011, 53, 991–997. [Google Scholar] [CrossRef] [Green Version]
- Cárdenas-Barrón, L.E. The derivation of EOQ/EPQ inventory models with two backorders costs using analytic geometry and algebra. Appl. Math. Model. 2011, 35, 2394–2407. [Google Scholar] [CrossRef] [Green Version]
- Lin, S.S.C. Note on “The derivation of EOQ/EPQ inventory models with two backorders costs using analytic geometry and algebra”. Appl. Math. Model. 2019, 73, 378–386. [Google Scholar] [CrossRef]
- Teng, J.T.; Cárdenas-Barrón, L.E.; Lou, K.R. The economic lot size of the integrated vendor–-buyer inventory system derived without derivatives: A simple derivation. Appl. Math. Comput. 2011, 217, 5972–5977. [Google Scholar] [CrossRef]
- Sphicas, G.P. Generalized EOQ formula using a new parameter: Coefficient of backorder attractiveness. Int. J. Prod. Econ. 2014, 155, 143–147. [Google Scholar] [CrossRef]
- Luo, X.R. A Detailed Examination of Sphicas (2014), Generalized EOQ Formula Using a New Parameter: Coefficient of Backorder Attractiveness. Int. J. Prod. Econ. 2019, 11, 931. [Google Scholar] [CrossRef] [Green Version]
- Minner, S. A note on how to compute economic order quantities without derivatives by cost comparisons. Int. J. Prod. Econ. 2007, 105, 293–296. [Google Scholar] [CrossRef]
- Wee, H.M.; Wang, W.T.; Chung, C.J. A modified method to compute economic order quantities without derivatives by cost-difference comparisons. Eur. J. Oper. Res. 2009, 194, 336–338. [Google Scholar] [CrossRef]
- Cárdenas-Barrón, L. A note on how to compute economic order quantities without derivatives by cost comparisons: Some comments. Int. J. Appl. Manag. Sci. 2010, 2, 198–204. [Google Scholar] [CrossRef]
- Chung, C.J. An easy method to derive the integrated vendor—Buyer production—Inventory model with backordering using cost–difference rate comparison approach. Math. Comput. Model. 2013, 57, 632–640. [Google Scholar] [CrossRef]
- Widyadana, G.A.; Cárdenas-Barrón, L.E.; Wee, H.M. Economic order quantity model for deteriorating items with planned backorder level. Math. Comput. Model. 2011, 54, 1569–1575. [Google Scholar] [CrossRef]
- Lau, C.; Chou, E.; Dementia, J. Criterion to ensure uniqueness for minimum solution by algebraic method for inventory model. Int. J. Eng. Appl. Sci. 2016, 3, 71–73. [Google Scholar]
- Chiu, C.; Li, Y.; Julian, P. Improvement for Criterion for Minimum Solution of Inventory Model with Algebraic Approach. J. Bus. Manag. 2017, 19, 73–78. [Google Scholar] [CrossRef]
- Luo, X.R.; Chou, C.S. Technical note: Solving inventory models by algebraic method. Int. J. Prod. Econ. 2018, 200, 130–133. [Google Scholar] [CrossRef]
- Çalışkan, C. On “Technical note: Solving inventory models by algebraic method”. J. Stat. Manag. Syst. 2021, 24, 1533–1541. [Google Scholar] [CrossRef]
- Çalışkan, C. A general approach for the derivation of optimal solutions without derivatives. Int. J. Syst. Sci. Oper. Logist. 2021, 1–12. [Google Scholar] [CrossRef]
- Jensen, J.L.W.V. Sur les fonctions convexes et les inégalités entre les valeurs moyennes. Acta Math. 1906, 30, 175–193. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| Article | Contribution |
|---|---|
| Chang et al. [7] | Open question: deriving the optimal solution for a reformulation of the EPQ problem with backorders |
| Lau et al. [29] | The conditions for the existence and uniqueness of the optimal solution for the posed problem |
| Chiu et al. [30] | Analysis of Lau et al. [29] and corrections and improvements of the former |
| Luo and Chou [31] | Analysis of both Lau et al. [29] and Chiu et al. [30], a purely algebraic approach as opposed to the former |
| Çalışkan [32] | Proof that Luo and Chou [31] is also partially incorrect and incomplete; correction and completion of the former |
| Çalışkan [33] | A general approach to optimize objective functions without derivatives |
| This paper | Definitively answering the open question in Chang et al. [7]; correction of the former approaches; analysis of the general problem in Lau et al. [29] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Çalışkan, C. Derivation of the Optimal Solution for the Economic Production Quantity Model with Planned Shortages without Derivatives. Modelling 2022, 3, 54-69. https://doi.org/10.3390/modelling3010004
Çalışkan C. Derivation of the Optimal Solution for the Economic Production Quantity Model with Planned Shortages without Derivatives. Modelling. 2022; 3(1):54-69. https://doi.org/10.3390/modelling3010004
Chicago/Turabian StyleÇalışkan, Cenk. 2022. "Derivation of the Optimal Solution for the Economic Production Quantity Model with Planned Shortages without Derivatives" Modelling 3, no. 1: 54-69. https://doi.org/10.3390/modelling3010004