1. Introduction
Today, the agricultural industry faces serious challenges such as population growth, the energy crisis, climate change, a shortage of labor, and the risk of pandemic diseases. The population is projected to increase from 7.9 billion in 2022 to 10 billion in 2050, and agricultural production is expected to continue to rise [
1]. Meanwhile, agricultural workers are being drawn to other industries, and the average age of farmers is increasing [
2], which increases the farm workers’ demand. Agricultural scientists, farmers, and breeders are also required to produce more food from less land in a sustainable manner to meet the needs of the projected population. Coupled with the reduction of rural labor, this demonstrates the inevitable need to increase efficiency by introducing more automation systems on farms [
3]. In fact, due to limited land, water, and labor resources, it is estimated that agricultural productivity needs to be improved by at least 25% to meet the global food demand [
4]. As some authorities claim, robots could help farmers to address these challenges by improving yields and productivity while reducing fertilizers and pesticides and water waste. Additionally to the rural drawbacks, greenhouse gas (GHG) emissions are doubled, and climate change reduces productivity in agriculture and available farm fields. It means that around 25% of all farmland is already degraded [
5]. Furthermore, the energy demand in different sectors is increasing [
6,
7].
Many countries are working to extract energy from alternative fuels obtained from renewable energy sources (RES) [
8] instead of fossil fuels for economic and environmental reasons. The International Renewable Energy Agency (IRENA) and the International Energy Agency (IEA) have developed a consistent baseline scenario to limit the global average temperature rise to 2 °C by 2100, which is the goal of the Paris Agreement.
As shown in [
9], biofuels, hydrogen, and electricity could play an increasingly important role in decarbonizing the transport sector before 2050, as vehicles will consume more biofuels and electricity than gasoline in 2050 [
10]. Researchers and manufacturers have introduced new technologies, such as battery electric vehicles, hybrid electric vehicles, and hydrogen-powered vehicles.
Agricultural engineering researchers focus primarily on increasing crop production efficiency and decreasing the difficulty of agricultural work, and different levels of technology have been defined in the last few decades. The future concept of agriculture contemplates more intelligent farms that are more efficient and environmentally more sustainable, with sensors, machines, robots, and information technology (IT). Robotics and autonomous vehicles can play an essential role in meeting agricultural production needs in the near future [
11]. Additionally, agricultural field robots could help to increase operational safety, improve soil health, and increase yields [
12]. Replacing heavy equipment with lighter remote or autonomous machinery can reduce the problems associated with topsoil compression in agriculture [
13]. Robots and electric tractors have many advantages, including developing precision agriculture, improving working conditions, limiting environmental impacts, and increasing crop profitability [
14]. The development of electrified off-road vehicles, such as agricultural electric vehicles, is still in the initial stages, but it attracts interest among researchers and industry. Although progress has been made in wheel loaders and other industrial vehicles [
15], tractors and agricultural mobile robots have not received enough attention. Machinery electrification has several advantages, such as easier control in sensor integration, active navigation, and task applications, compared to traditional types. Moreover, renewable energy contributes to the supply of energy needed with lower emissions to take the electric vehicle one step further.
This paper outlines some of the latest achievements in agricultural electric vehicles and robots driven by renewable energy resources in the line of autonomous hybrid electric off-road vehicles. The primary purpose is to discuss the challenges of agricultural electric vehicles and robots in incorporating alternative renewable energy sources and highlight related opportunities for future agriculture. Furthermore, emerging digital technologies are investigated to understand their applicability in hybrid electric autonomous vehicles for agricultural applications. The innovation of this work could be a survey on the challenges and opportunities ahead in the possibility of integrating new technologies, such as robotics, artificial intelligence, blockchain, and renewable energy sources, including hydrogen, for future agricultural electric vehicles.
The structure of this article is as follows. A brief historical review and a general description of the concept of Agriculture 5.0 can be found in
Section 2. A literature review on research and development in the agricultural sector, which includes robotics, autonomous electric vehicles, hybrid electric powertrain, on-site energy production, and available sources of renewable energies, is presented in
Section 3. Recent enabling and future digital technologies are described in
Section 4.
Section 5 discusses research challenges and potential opportunities in the context of Agriculture 5.0. Finally, a summary of findings is given in
Section 6.
2. From Traditional Agricultural Practices to Smart Farming and Agriculture 5.0
Population growth forces farmers to change their farm management methods to meet the growing demand for high-quality foods.
Figure 1 shows the roadmap for the agricultural revolution. The traditional agricultural practice from ancient times to the late 19th century, when farmers relied heavily on indigenous tools for cultivation, is called Agriculture 1.0 [
16]. Such peasant farming required much manual labor, but productivity was very low. Taking advantage of the first Industrial Revolution around 1784–1870, agricultural production increased in the early 20th century, when farmers used many types of machinery to increase food production and reduce manual labor forces, called Agriculture 2.0 [
17].
Further development of embedded systems, software development, and communication technology have further improved the automation capabilities of production plants. These above developments led to the next agricultural revolution, known as Agriculture 3.0. Green renewable energies such as solar power and wind power were also considered in the production process. Additionally, information technology through yield monitoring, variable rate applications, and farm guidance systems also help to explore precision agriculture [
18]. It is expanding due to the availability of large amounts of data due to the growing agricultural knowledge system. This new philosophy focused on agricultural data is expressed in several terms: Agriculture 4.0 and Digital Farming [
19]. As a result, precision agriculture principles have been introduced, where producers use systems that generate data on their farms that are processed to make appropriate strategic and operational decisions. Encouragingly, the application of Industry 4.0 technologies to tackle the COVID-19 pandemic is presented in [
20]. However, it seems that the current level of technology in agriculture could not respond to the food demands, increasing trends, and existing challenges around the world. For instance, food prices have risen during the pandemic situation. Therefore, it is necessary to use new and innovative sustainable methods to enhance farming efficiency and productivity while considering other environmental issues.
The intended progress in agricultural robotics aims to overcome the challenges posed by population growth, the acceleration of urbanization, the high competitiveness of high-quality products, the shortage of resources and skilled workers, and environmental protection. In short, the four preceding industrial revolutions have gradually changed the shape of agricultural activities. Traditional labor-intensive agriculture needs to be replaced by autonomous robotic farming, which works in an environmentally friendly procedure in sustainable ways. Therefore, the agricultural sector is undergoing a transformation driven by new technologies that appear to be highly promising to enable this primary sector to reach the next level of farm productivity and profitability. Additionally, young people in wealthy countries such as the US and Canada are looking for employment opportunities in urban areas because agricultural jobs are considered “hardworking” and unprofitable [
21]. As a result, farmers are looking for new ways to automate their operations. One solution to this labor shortage is the use of agricultural robots with integrated artificial intelligence (AI) capabilities.
As mentioned above, precision agriculture consisting of the necessary components further improves the management efficiency of agricultural companies by adding a digital system that enhances the knowledge of producers. Based on the literature, there is a distinction between precision agriculture and Agriculture 4.0. Precision agriculture is often associated with field variability and specific analytical and technological issues, such as applying agricultural inputs in areas with the highest production potential. On the other hand, Agriculture 4.0 goes beyond field variability analysis to manage farms based on in-depth knowledge of specific contexts and situations, aimed to create a value chain that fully integrates and engages technologies and agricultural processes [
22].
Moreover, if this process contains a robot structure with AI algorithms on the system, the overall concept is called Agriculture 5.0 [
23]. This concept means that the farm follows precision agriculture principles and uses equipment that includes unmanned operations and autonomous decision support systems.
3. Research and Development in the Agricultural Sector
The move to Agriculture 5.0 will be on the agenda of most major farm tool and autonomous equipment manufacturers for the next decade. The agricultural robot is taking farming practices to a new phase by turning them into brighter, energy-independent, and energy-efficient tools and adapting their performance for complex tasks. Accordingly, farmers could tackle the challenge of high energy prices and labor shortages.
In addition to utilizing different robotic systems and the electrification of agricultural vehicles, on-site renewable energy production could be a potential strategy for efficiency enhancement and energy independence to provide the needed power as a future-oriented approach.
Research has already received considerable attention in designing independent energy ecosystems, including on-site hydrogen production and photovoltaic farms and even photovoltaic-powered agricultural monitoring robots [
24]. The following sections describe green technologies that could be essential in the sustainable development of autonomous robotic vehicles in agriculture.
3.1. Current Applications and Trends in Agricultural Robots
Robots are well used in industrial applications such as material processing, transportation, and quality control inspection. Many agricultural robots have been proposed and developed, bringing automation and intelligence to agricultural machinery. Agricultural robots are self-contained machines used to improve efficiency and yield performance, reduce reliance on labor, and improve overall productivity [
25]. Lightweight robots can reduce the soil damage produced by heavy agricultural machinery [
26]. Moreover, robots utilized in farm applications should be no heavier than human workers because this situation could increase soil damage. Small and lightweight robots should also be cheaper and more affordable, to increase the presence of robots on farms. Recently, several research articles have been presented regarding the development of small robots. In [
27], a mobile robotic platform is used to carry a multi-sensor platform to perform ground mapping. The terrain information is critical to improve the operation of robots since it can be used to improve the robot’s control, increase fuel efficiency, and reduce soil compaction effects. Moreover, an automatic terrain estimation and classification system that can be used for self-driving small robots was presented in [
28]. Since small and lightweight robots have several advantages over heavier robots, such as reducing soil damage and better mobility among crops, more research about this type of agricultural robot is needed [
29].
Agricultural robots are generally equipped with sensors or actuators for a wide range of tasks, such as weed control, sowing and planting, aerial data collection, field mapping [
27], fertilization and irrigation, intercropping work, treatment, soil analysis, and environmental protection monitoring. The use of automatic equipment and robot in agriculture is the most obvious, and there are many success stories in robot agriculture. The Canadian Institute for Advanced Research (CIFAR) reported that agricultural robotics would become a mainstream technology by 2020 and be widely adopted and applied on future farms [
30]. Consulting firms and research institutes have made market forecasts for agricultural robotics. According to Statista [
31], shipments of agricultural robots will increase to 594,000 in 2024, with sales rising from USD 3 billion in 2015 to USD 74.5 billion in 2024.
Agricultural robotics can overcome restrictions such as low productivity and intensive manual labor. Robots can perform tasks that humans cannot perform due to harsh conditions, such as environmental monitoring and control, crop monitoring, and care and treatment. In addition, the use of robots in agriculture could reduce operating costs and farming lead times [
17]. Another reason to use agricultural robots is to improve food quality and productivity and reduce labor costs and working hours. Market demand and better technology will enable researchers to develop agricultural robots for more purposes, including vegetable and fruit harvesting, with higher accuracy and productivity.
The literature shows that various technologies are already used in the research of agricultural robots around the world. For instance, recent review presented in [
21] reveals that 37% of robotic systems are 4WD, and 22.06% are used in weeding tasks. Moreover, 50% use cameras, 20% RTK/GNSS/INS, and 16% LiDAR as the main sensors for navigation. Australian and US companies and research institutes design 17% and 14% of agricultural robots, respectively. In the near future, the integration of many new technologies such as engineering, computer vision, AI, and control systems in the agricultural robotics sector will facilitate the advent of autonomous system architectures. The autonomous concept in agriculture will allow the opportunity to develop a new range of agricultural equipment based on small intelligent machines that can perform many tasks accurately and in an environmentally friendly way. For instance, smart tractors [
32] could work together to generate operational routes and intelligently avoid field obstacles to ensure the safety of both farmland and people. The robotic cultivator [
33] can distinguish between weeds and crops by computer vision and apply the herbicide accurately only to the weeds. Harvesting robots [
34] help farmers to collect various products more efficiently. Finally, autonomous robots in agriculture also contribute to livestock, such as automatic feeding, milking, and grazing.
3.2. Design Architecture of Autonomous Agricultural Robots
Future agricultural robots and vehicles are considered to work independently and autonomously. The Society of Automotive Engineers (SAE) defined six levels of autonomous driving in vehicular applications [
35]:
Level 0—No Driving Automation or Manual Driving: the driver is entirely responsible and permanently carries out all aspects of the driving task.
Level 1—Driver Assistance System: the driver can perform steering, accelerating, or braking. In this approach, the system performs one of the driving tasks.
Level 2—Partial Driving Automation: the driver must permanently monitor the system, where several tasks might be performed with the automation system.
Level 3—Conditional Driving Automation:the driver can turn attention away from the road in certain situations but must always be ready to take complete control. This system can control the vehicle autonomously on defined routes.
Level 4—High Driving Automation: the driver can transfer complete control to the system and devote himself to other activities while taking control at any time. This system could perform all driving tasks.
Level 5—Full Driving Automation: no driver needed means that the system controls the vehicle autonomously under all conditions.
Consequently, various automation systems for agricultural vehicles have been proposed and introduced. Currently, there are four categories of autonomous and semi-autonomous agricultural vehicles [
14]:
Vehicles with driver assistance: Vehicles with various driver assistance tools such as markers, safety sensors, and indicators. This reduces the complexity and increases the efficiency of field use.
Vehicles with automatic steering: Vehicles with automatic steering, such as tractors and other farm vehicles. The driver controls other tasks, such as object avoidance, safety, vehicle detection, turning at the end of the line, and other non-automated tasks.
Vehicles with supervised autonomy: Vehicles that function in supervised autonomy employ vehicle-to-vehicle technology and have a wireless connection between two or more vehicles to share data [
36]. The vehicle in front (with the operator) determines the speed and direction, which is sent to the other self-driving vehicles to be imitated.
Unmanned vehicles: Unmanned Ground Vehicles (UGVs) are fully autonomous machines with an array of sensors that enable them to respond to obstacles and unforeseen circumstances on the farm.
Modern autonomous vehicles use specific sensors such as data acquisition devices to monitor environmental variables and vehicle status. The collected data are sent to the fusion algorithm to predict the next variable state, and finally, the actuator is controlled by the control algorithm. Autonomous vehicles in agriculture use GPS technology to track the path of a vehicle. In addition, this allows the reception of accurate map data over the Internet (e.g., precision planting, variable rate applications, or yield monitoring). Various multispectral imaging devices and LiDAR sensors were installed and used to monitor and generate images of trees and plants [
37]. Subsequently, automated machinery in agriculture has specific technical requirements. Unlike the industry, it can be challenging to automate these applications fully. Agricultural robots and vehicles are exposed to highly dynamic environments, but they are expected to touch accurately, feel, and manipulate crops and environments [
38]; thus, increasing efficiency and minimizing impact should be prioritized.
Some industrial robot platforms are available with high precision and speed [
39]. Nonetheless, their application in agriculture is limited due to an unstructured environment and the uncertain tasks that present significant challenges. On the one hand, the demand for fruit and vegetable cultivation in the off-season requires various aspects of automation and robotics in closed-field crop production environments such as greenhouses [
39]. On the other hand, field robots should work in dynamic, complex, and uncertain environments to function efficiently under real conditions. This is much more sophisticated than an industrial robot that picks and places huge bolts on the assembly line. Despite the importance of automation in agriculture, it faces more restrictions than industries; some of them are as follows:
Dependence on the type of operation (greenhouse, small or large open fields);
Environmental conditions that can affect sensor observations (rain, fog, dust, temperature, moisture, radiance);
Changing conditions of workspace (spread and large workspaces);
Ground surface conditions and characteristics can change unexpectedly;
Plants should be protected from damage (e.g., by navigation errors or operation mistakes);
Design of system should be optimized in performance and cost [
40].
It should be noted that the farm environment, in some cases, such as orchard gardens and greenhouses, is more straightforward than one of the urban autonomous vehicles on public roads. In such cases, field dimensions and fieldsets are well defined, as are areas that are or need to be planted for a particular product. In addition, boundaries and obstacles are defined, and transit areas are approved for vehicles.
3.3. Research Trends in Autonomous Agricultural Vehicles
Researchers are now looking to achieve fully autonomous agricultural vehicles. Agricultural vehicle and robotic research ranges from automated harvesting with professional manipulators and innovative grippers integrated into a custom-designed mobile platform to autonomous target spraying for pest control [
41]. Most of the recent literature published in this research area includes visual-based control, advanced image processing techniques, gripper designs for automatic harvesting of valuable crops, terrain assessment using vehicle modeling [
28,
42], and navigation for field robot development. Moreover, agricultural robots’ impacts, ethics, and policy points of view are studied in [
26], where the social, environmental, and economic benefits of robots in agriculture are highlighted.
Some design guidelines and parameters for plant care robots have been evaluated in [
43]. The results show that design parameters such as work capacity, function, damage, economy, environment, renewable energy use, weight, and attractiveness are essential. According to [
44], the most common sensors employed in autonomous farm vehicles can be categorized into three classes:
Motion measurement including odometry (from driven wheels or from separate odometry wheels) and inertia sensors (accelerometers and gyroscope);
Artificial landmarks using laser positioning and millimeter-wave radar; and
Local feature detection using sonar and computer vision.
The autonomous agricultural vehicle navigation systems use typically some of the following base algorithms [
45]:
Neural networks and genetic algorithms;
Fuzzy logic control;
Dead reckoning algorithms;
Image processing;
Statistical-based engineering algorithms; and
Kalman filters.
A specific architecture called RHEA has been proposed and developed in [
40]. This work included robot design and control, WiFi communication, and software interfaces for human users. However, the authors recognized the need to reduce agricultural robots’ size, complexity, and cost.
Many researchers and companies work on agricultural robots in various applications for research purposes, and some commercial robot systems [
46,
47,
48]. Such applications include solar-powered systems for weed control robots, targeted spraying robots, compact robots for inspection and data collection, harvesting robots, and robots for recognition and operation in greenhouses. Other applications of agricultural robots are crop scouting, phenotype determination, milking, and sorting. Most of the robots in agricultural applications are still in the prototype stage. Recent studies about agricultural robots [
49,
50] and UGVs [
11] present the evolution from early attempts to the latest developed prototypes. They highlight that if agricultural robots are efficiently included and implemented, they can play a key function in lowering manufacturing costs, growing productiveness and quality, and allowing custom-designed plant and crop remedies.
In addition to autonomous agricultural robots, some researchers and engineers have developed unmanned tractors. Most of them adopted an industrial farming style, all known in advance, where the machine could fully function in a predefined way, similar to a production line. Early prototypes with guidewire control systems date back to the 1950s and 1960s [
14]. In the 1980s, combining computers and image sensors opened up the possibility of computer vision-based guidance systems. In the mid-1980s, Michigan State University and Texas A&M University researchers investigated a computer vision guidance approach [
51]. The Claas autonomous navigation system offers Cam Pilot steering and 3D computer vision tracking features [
52]. This idea could be of interest as the need for more efficient vehicles is increasing, and some field operations may be fully automated thanks to autonomous technology. However, they have not entirely succeeded in their mission because they cannot reflect the complexity of the real world.
Future research on autonomous agricultural vehicles involves the development of electrified powertrain systems, improved guidance system accuracy, and safe operations related to machine, environment, and human interactions. Furthermore, from the long-term point of view, the electrification of the agricultural vehicle seems to be a more important step for robotic and smart farming in the context of Agriculture 5.0.
3.4. Overview of Agricultural Vehicle Electrification
International emission regulations force the industry and scientific community to explore new alternative powertrain solutions for off-road vehicles. A more efficient and less polluting machine is essential. Today, some manufacturers in the agricultural sector are also developing new electrical solutions that enable both emission regulation compliance and increased overall productivity by introducing higher levels of automation. Due to recent regulations on pollutant emissions, off-road equipment manufacturers are working on research and development to meet stringent limits. Therefore, alternatives have been considered to solve the emission problem in recent years. In this direction, electric and hybrid vehicles have proven to be viable alternative solutions.
Electrification of agricultural drive systems leads to improved overall efficiency, performance, productivity, and flexibility [
14]. One of the benefits of using electrical accessories such as radiator fans, water pumps, and air conditioner compressors to separate traditional mechanically driven components from the engine is the potential reduction of parasitic loss and fuel consumption [
53]. In addition, overall agricultural performance can be improved by improving operator comfort and machine performance. Another advantage of electrical accessories is the flexibility of the tractor’s component arrangement to improve power take-off (PTO) load response, enhance transport acceleration, and increase productivity [
54].
Electrified agricultural propulsion systems have some direct and indirect benefits. Besides the emission reduction potential of the electrified powertrain in agricultural vehicles, there are some further advantages to their use for various tasks in farming. Such advantages include more accurate controllability than conventional tractors, making more comfortable and productive farming possible [
14], and lower maintenance costs and fewer moving components, reducing repair costs. All the mentioned advantages could facilitate the development of an autonomous agricultural electric vehicle.
Based on the literature, there are three main types of green electric vehicles [
55]: battery electric, hybrid electric, and fuel cell electric. Each concept has some advantages and disadvantages. For example, a battery electric vehicle has a limited battery lifetime, long recharging time, high cost, environmental emissions related to battery production, and limited recharging infrastructure. These limitations would be more drastic in off-road vehicles, such as tractors, which usually require more energy in a short time [
56]. Thus, hybrid electric vehicles (HEVs) have been proposed as an interim solution to interact with this technological and sustainable development. An HEV uses at least two energy sources to increase driveline efficiency. The basic benefits of vehicle powertrain hybridization are downsizing engines by running the internal combustion engine (ICE) at maximum efficiency, eliminating idle fuel consumption by turning off the engine (stop-and-go), and recovering energy during deceleration, the aim of the regenerative braking system. Using an electric or hybrid propulsion system makes it possible to use small electric actuators that consume less power and can apply treatment to small areas using unmanned robots [
57]. These new technologies based on clean energy sources can significantly reduce air pollutants and greenhouse gases. Alternating the ICE and introducing an alternative electrical energy storage system allows small agricultural tractors to run large machines. Such a distributed system is important, particularly in precision agriculture. Although some progress has been made in construction vehicles, farming tractors and mobile robots have started receiving attention [
15]. Nevertheless, there is no in-depth analysis concerning the designing and developing approaches for off-road agricultural applications. We have to highlight that the electrification of agricultural vehicles is still in the early stages.
3.5. Research Trends in Agricultural Vehicles
As mentioned before, the electric propulsion of agricultural machinery has three main applications: tractors, equipment, and agricultural robots. Usually, a tractor is a multipurpose machine used to pull trailers and run attachable tools that do not have their own power unit. Today, almost all agricultural vehicles use an ICE powered by gasoline or diesel [
58]. Off-road vehicles with ICE can attain low efficiency and offer reliability with trustable attributes in maintenance and replacements. On the other hand, electric vehicles can attain comparatively high efficiency and less mileage with feasible maintenance and replacements. Hybrid configurations for agricultural vehicles can be a solution to increase productivity and allow them to operate all day without the concern of the battery charging present in some electric solutions [
55], especially when there is poor access to electric infrastructure for battery charging on the farm.
In an HEV, electrical and electronic components are integrated into the mechanical system to supply power to other propulsion units. The proper combination of powertrain components allows for many powertrain topologies. Based on the literature, generally, there are three main possible topologies: pure electric, series hybrid, and parallel hybrid [
59]. Hybrid electric architectures in construction, handling, and agriculture machines have been studied in [
60]. Based on this study, there are a few electrified architectures for agricultural vehicles. For instance, an example of a hybrid architecture is the diesel-electric four-wheel-drive (4WD) architecture for the RigiTrac EWD 120 tractor from a project of the Technical University of Dresden [
60]. Regarding powertrain hybridization concepts in the literature, the series hybrid concept is more commonly used in high traction and heavy load applications such as tractors, and the parallel hybrid approach is widely used in the automobile industry.
The timeline for a well-known commercial hybrid electric tractor in agriculture is shown in
Figure 2. For example, in 1954, the International Harvester introduced the Farmall 400 tractor to support electric farming equipment and accessories. Interestingly, the world’s first fuel cell vehicle was a tractor manufactured by Allis Chalmer in 1959. It featured 1008 individual alkaline fuel cells connected to 112 nine-cell units located in four banks, producing enough power to drive a 20 hp DC motor. In this regard, an FC tractor concept called NH2 was released by New Holland Co. in 2009. The fuel cell NH2 produces approximately 106 horsepower, allows farmers to reduce the cost of purchasing fossil fuels, and increases autonomy [
14].
All-electric tractors have been introduced by several manufacturers recently. In 2016, John Deere unveiled an all-electric prototype of the 6R SESAM that is equipped with two electric motors that drive the gearbox and PTO [
61]. The onboard battery pack is said to withstand four hours of mixed work. The Fendt company unveiled the e100 Vario as the first all-electric special tractor [
62]. A single electric motor is used to drive both the rear and front axles (if all-wheel drive is required). The system runs on a 100 kWh battery and, according to the manufacturer, lasts all day on a single charge. Some known companies have developed and introduced autonomous guided tractors and agricultural machinery with local and global sensors in row crops and orchards. For instance, John Deere’s concept offers an auto-steering vehicle with a farm management system that reduces driver mistakes and overtaking, resulting in improved fuel efficiency. Other companies, such as Case New Holland (CNH), offer similar systems. In 2020, ELMEC introduced the fully electric self-driving tractor robot ERION.
Recently, some tractor manufacturers have adapted their equipment to operate on alternative fuels such as electricity and biofuels, solar panels, and hydrogen FC. However, technical information on these prototypes is not available to the public. Therefore, this section’s focus will be on future electric drives. Some research has focused on other sustainable green energy sources, such as biofuels and solar energy, to replace traditional fossil fuels in agricultural vehicles, with direct benefits for the environment and society [
63]. The research results show that a hybrid electric multifunction tractor produced around 17% less emission than comparable diesel-powered tractors. One should highlight that the high life cycle costs of electric tractors are due to the vehicle’s battery and its replacement costs (around 52% of the total price). As mentioned above, due to the low durability of the battery and the long charging time, the ability of off-road electric vehicles to gain a long-term market presence is diminished [
64]. These properties limit the use of a purely electric powertrain in tractors that require large amounts of energy in a short period.
Another alternative energy resource to batteries is hydrogen fuel cells. Unlike batteries that require a long recharging time, hydrogen fuel cells operate if hydrogen fuel is available in the tank, and it can be recharged as quickly as the gasoline tank at a refuelling station [
65]. A comparison of battery electric vehicles, hydrogen FC electric vehicles, and hydrogen FC plug-in hybrid vehicles is presented in [
66]. This research work reveals that battery electric and hydrogen FC plug-in hybrid vehicles have similar life cycle costs. The life cycle costs of the electric vehicles mentioned are higher than those of internal combustion engines; however, they could be reduced by 2030. In this regard, in [
57], the authors investigated the possibility of fuel cell hybrid powertrains for an agricultural tractor. The results showed that the fuel cell system still suffers from disadvantages such as limited lifetime, high cost, hydrogen storage issues, and inaccessibility of infrastructure. However, they can reduce fuel consumption by almost one third compared to diesel engine vehicles with conventional power sources [
55]. From previous findings, using various sources of alternative renewable energies in agricultural vehicles could be one solution to the farm’s energy demand increase.
3.6. On-Farm Renewable Energy Production and Availability
Renewable energy is widely used in various industries, and agriculture is one of the most promising applications in the near future. Farms usually are far from the fuel stations, especially in developing countries. Therefore, providing fuels for agricultural vehicles might increase the farming costs. In this case, an independent on-site renewable energy supply system can offer a significant opportunity to provide the farm’s required energy or promote energy to the nearby community, even selling electricity to the local network. Moreover, this may assist in the performance enhancement and decrease the dependency on fossil fuels and present distributed electricity generation. Renewable energy resources seem of tremendous significance for the fulfilment of electric-powered vehicles in agriculture, especially for regions far away from the fueling stations [
67]. Moreover, renewable electrical energy can be combined with wireless power transfer (WPT) technology to ensure the energy supply of outdoor sensors [
68]. Distributed or dynamic WPT can be extended to robots and agricultural vehicles to reduce the size of embedded energy storage. Regarding the mentioned potentials, on-site renewable energy production and agricultural powertrain electrification are more promising methods in future agriculture.
Solar energy: for heating or photovoltaic electricity production, this is farms’ primary renewable energy source. Solar energy can be used in agriculture in various ways, including power generation, pumping, heating, and crop drying. Key benefits include its wide availability and low cost. However, due to the intermittent nature of the solar system and its low energy density, other auxiliary energy resources such as batteries are usually needed to provide short-term continuous energy [
47].
Small wind power: small wind turbines are other potential renewable energy sources for agriculture. However, their utilization is limited by the wind energy potential that depends on the mean wind speed. This source has a highly stochastic behavior; thus, it needs energy storage for proper integration.
Biofuels and biomass: there are primary resources abundant in farms that can be used for generating biofuels. They include agricultural waste from product residues, food waste, and forest bioenergy resources. These materials can be used to produce other green energy sources, such as biodiesel, bioethanol, biomass pellets, and bio-methane gas [
69]. Ethanol as a biofuel is generated from sugar-wealthy vegetation through a fermentation process [
70]. Biodiesel can also be produced from renewable oils, together with animal fats and seed oil [
71]. In addition, biogas is produced through the anaerobic digestion of vegetation and waste [
72].
Micro-hydro power: this is a potential renewable energy source for agriculture that could offer controllable electricity production. We must emphasize that small dams with turbines were one of the first options for mechanical force generation (e.g., mills) and electricity production in the agricultural sector.
Hydrogen as energy vector: hydrogen is being promoted as a potential fuel and energy vector, as indicated by subsidized programs from several government agencies worldwide. Hydrogen can be produced from various primary energy carriers using various techniques. Approximately half of hydrogen is produced by thermal catalysts and gasification processes that use natural gas as the primary source. There are several ways to generate hydrogen from solar energy [
73]. Electrolysis, which could use electricity from renewable energy sources such as solar energy, is the most commonly proposed method for breaking down water into hydrogen and oxygen. New technologies for converting organic materials to fuel, e.g., to produce hydrogen, are available. These include the cultivation of cyanobacteria or microalgae and thermochemical or fermentation processes. Biomass gasification, for instance, is the fastest and cheapest way to produce sustainable renewable hydrogen [
74]. However, more research is needed on many issues, such as transfer and processing techniques for producing hydrogen from biomass. Artificial photosynthesis is another promising concept. Several studies have been conducted to mimic the enzymatic processes that green plants use to capture sunlight and break down water molecules into oxygen and hydrogen. Therefore, environmentally friendly hydrogen could be a future option for using hybrid power systems in agriculture. However, there are still many challenges in producing hydrogen from renewable energy on energy-independent farms and using it in future eco-friendly vehicles, such as economic and technical problems.
Figure 3 shows a schematic ecosystem of an energy-independent farm. This schema suggests that all renewable energy sources could be converted to electricity. Then, this energy could be used on other electrified devices such as sensors, vehicles, and robots. The energy produced using renewable sources may be stored in batteries for a short time and hydrogen tanks for long-term storage. Depending on the application, the electricity conversion can be bypassed, and the source can be used directly to produce mechanical or thermal energy.
4. Technologies Enabling Agriculture 5.0
Agriculture stands to gain more benefits from technology than many other industries. Agriculture is essential to the lives of individuals, farmers, and society. Therefore, everyone benefits from the fact that academia and industry introduce new technologies to optimize agricultural processes. The integration of such technologies provides the opportunity to promote the basis for intelligent and automated agriculture. As summarized in
Table 1, the following technologies and methods may be used in current and future research trends in the Agriculture 5.0 context.
Agricultural Unmanned Aerial Vehicles (UAVs): UAVs, popularly known as drones, are airborne systems controlled remotely by a human operator or operate autonomously by an onboard computer. UAVs are widely used in agriculture [
75], industry, and commerce. The labor-saving and high-efficiency characteristics of UAVs are in line with the development goals of Agriculture 5.0. For instance, UAVs are used in crop spraying, photography, mapping, and surveying applications. Research on agricultural UAVs focuses primarily on crop protection measures, field monitoring, plant pollination, and herd placement [
75,
76]. UAVs for agricultural applications include electric multi-rotor UAVs, fixed-wing UAVs, and single-rotor UAVs. Today, electric multirotor UAVs boast a significant market share due to their low cost, low failure rate, ease of operation, and environmental protection.
Fifth- or Sixth-Generation of Communication (5G and 6G): 5G and 6G are next-generation wireless communication technologies with high-frequency electromagnetic waves and low-latency characteristics [
77]. These networks offer faster data transmission speeds and better throughput than previous wireless communication technologies, providing device communications, user-side AI algorithms, distributed fault diagnostic methods, and complex security strategies, which might be applicable in agriculture [
78].
Internet of Everything (IoE): While the Internet of Things (IoT) focuses primarily on sensor-based smart facility machine-to-machine communication, the IoE aims to serve people through the IoT. The IoT represents a physical object with sensors, processing capabilities, software, and other technologies connecting and exchanging data with other devices and systems over the Internet or other communication networks [
79,
80]. In agriculture, IoT can be used in autonomous agricultural equipment, robots, UAVs, livestock and water management systems, and remote sensors combined with data analysis tools to monitor crops and fields to help farmers in farm management to save time and money.
Data Analysis: This technology uses detailed surveying and data processing methods (machine learning, statistical analysis, and big data) to extract useful information [
81]. Technologies based on artificial intelligence can play an important role in agriculture with modeling and inference capabilities, helping us to understand all the data available [
82]. Artificial intelligence could be used for deep learning, neural networks, fuzzy logic, genetic algorithms, and expert systems. Artificial intelligence can analyze big data, select valuable information, and provide unique systems to improve agricultural productivity [
83]. Many researchers are studying AI technology and its multiple applications [
84]. In agriculture, the main research on AI includes intelligent robots based on machine learning models and computer vision technologies for agricultural tasks such as seeding and harvesting [
85]. In addition, some researchers are working on monitoring using computer vision technology and deep learning algorithms to analyze soil health and crop condition data [
86].
Fog and Edge Computing: Fog computing is a computing paradigm that reduces communication latency by moving cloud computing equipment and services to access networks. Edge computing technology significantly reduces traffic and lag by deploying artificial intelligence algorithms on devices rather than cloud servers [
87]. As a result, based on the technologies mentioned above, manual operation is replaced by intelligent machinery and decision-making systems that contribute to an intelligent agricultural context [
88]. An example of a mobile edge-computing-based Internet of Agricultural Things application is shown in [
89].
Blockchain: A blockchain is a system that records information in ways that make changes, hacks, or cheats difficult or impossible [
90]. The blockchain has the potential to help farmers in many aspects, including insurance, finance, product traceability, and security [
91]. These technologies could be helpful in the agricultural market for purposes such as distributed ledgers and smart contracts. It permits eliminating counterfeiting in production and supply chains, bringing healthier products to consumers, and building trust among business players [
92].
Software-Defined Networking (SDN): Software-defined networking is called a centralized control network. Custom virtualization and programming perform routing and control separately, adding flexibility and reliability to network management [
93]. Recently, multi-domain SDNs that control large networks have become a hot topic in new concepts such as smart agriculture and renewable energy system management [
94]. This technology can effectively simplify and manage heterogeneous networks with various devices.
Virtual, Augmented, and Mixed Reality (VR, AR, and MR): VR is a simulation experience that is similar to or completely different from the real world. AR is a technology that overlays virtual objects in the real world. Mixed reality is a blend of physical and digital worlds, unlocking natural and intuitive 3D human, computer, and environmental interactions [
95]. Although VR is widely used as an educational method in the industry, few studies have been done on VR for agriculture purposes for farmers’ education simulation [
96] and technical training in the maintenance of agricultural machinery [
97]. Both VR and AR technologies contribute to the automation and intelligence of Agriculture 5.0. For example, farmers can remotely and accurately control agricultural robots through VR, AR, or MR devices from the control center or home.
Cybersecurity: Cybersecurity is a technology, process, and control application protecting systems, networks, programs, devices, and data from cyberattacks. As a critical sector, smart agriculture increasingly relies on digital systems to work efficiently; the threat of large-scale cyberattacks is increasing; therefore, protecting these systems from attacks is a vital issue [
79,
98]. Cybersecurity can be divided into five domains: critical infrastructure security, application security, network security, cloud security, and IoT security [
99].
Additive Manufacturing and 3D printing: 3D printing is revolutionizing the manufacturing industry [
100]; it can also bring some benefits to agriculture. Specifically, 3D printing can be used in agriculture for manufacturing tools, urban agriculture, scale models, spare parts, and indoor gardening.
Table 1.
Enabling technologies on the road to Agriculture 5.0 context [
79].
Table 1.
Enabling technologies on the road to Agriculture 5.0 context [
79].
| Enabling Technology | Type | Characteristics | Key Application in Agriculture | Research Challenge |
|---|
| UAVs | Airborne system, aerial vehicle | Remote control system, on-board computer, flying above objects, labor saving, and high efficiency | Autonomous farming, aerial spraying, monitoring, photography, farm mapping, and surveying | Limit working time due to battery limitation, limit performance in windy and poor weather conditions, flying restriction of drones in many countries |
| 5G and 6G | Wireless communication technologies | Fast data transportation, large data quantity, low latency | Device communications, user-side AI algorithms, distributed fault diagnostic methods | Network infrastructure is not available in all regions, with spectrum availability and implementation issues; currently, it is expensive and has security concerns |
| IoE & IoT | Information carrier | Providing services to people by connecting physical objects (IoT) and everything (IoE), low communication cost and latency, sensor-based smart facility | Precision farming, autonomous agricultural equipment, robots and UAVs, livestock and water management systems, remote sensing, smart greenhouse | Professional agricultural sensors, wireless power transferring and ambient energy harvesting, cross-media and cross-technology communication, robust wireless networks, intelligent action |
| Data analysis | Data summarizing and information extraction | Mathematical computation or statical analysis, computer-based techniques, machine learning | Agricultural robot, computer vision technologies, agricultural decision support system, mobile agricultural expert system, agricultural predictive analytics | Hard to find single standard solution, gap between farmers and AI researchers, distributed secure machine learning, technical and social issues with big data |
| Blockchain | A specific type of database | Secure and unique, difficult to change or hack | Smart contracts, insurance and finance, product traceability and supply chains, cybersecurity | Interoperability, scalability, energy consumption, security and privacy |
| SDN | Network architecture | Centralized control network, flexibility and reliability in network management | Smart agriculture, renewable energy system management, automatic husbandry farming | Controller placement, scalability, performance, security, interoperability, and reliability |
| VR, AR, and MR | Simulation system | Virtually and augmented information technologies | Farming education, design and maintenance of agricultural machinery, remote control of robots | High cost, not enough available tools and software, interoperability, and reliability |
| Cybersecurity | Security tool | Evaluation of security, protecting from cyberattacks | Infrastructure security, application security, network security, cloud security, IoT security | Lack of knowledge of the cyberattacks, lack of up-to-date infrastructure for cyberattacks, security vacuum in robots’ and autonomous vehicles’ software and hardware |
| 3D printing | Manufacturing method | Ease of developing complex structures, cost reduction, flexible design and production | Manufacturing tools, urban agriculture, 3D food printing | Time-consuming for production, limited in part size and performance, require modeling and other skills |
5. Research Challenges and Opportunities
As mentioned previously, the agricultural sector is crucial for human survival, and there are many challenges, such as population growth, increasing energy demands, and climate change. Advances in agriculture are crucial for growing production and tackling the challenges in the coming years. In this scenario, the technological potential can be exploited to meet the high-quality food needs of the human population, without damaging the environment, in efficient ways.
The number of studies associated with sustainable agriculture shows that technological adoption and environmentally friendly green solutions can develop resilient agriculture. Agricultural production processes are now mechanized and computerized in developed countries, but the lack of digitization and intelligence is a significant obstacle to improving automation capabilities. Large machines such as tractors and other equipment favor agricultural monopolies, while small technologies such as robots and drones can be developed at a lower cost, with new features such as artificial intelligence to aid small farmers in accumulating crop variability data and in precision agricultural tasks. For instance, weeding and harvesting robots have received more attention in recent years. However, robotics for agricultural applications have not yet reached a commercial scale, except for some limited tasks such as milking robots and harvesting automated machines. In the case of picking valuable fruits with robots, the technology is close to being implemented in a commercial product in the near future [
101]. In [
102], the agricultural robots have been classified based on the type of application. The results showed that navigation systems, robot–crop interactions, and agronomy–robot fusion are scientifically important to promote advances in agricultural robot technology. The speed and accuracy of robots for agricultural applications are the most important issues addressing the generalization of robotic systems. Therefore, many researchers are working on developing robot systems that can operate faster than humans.
The complex and dynamic working environments of agricultural robots make their design more challenging than industrial robots [
29,
103]. Therefore, it is required to consider specific characteristics while developing such machines. Developing an affordable and effective agricultural robot requires interdisciplinary cooperation in some areas, such as agricultural engineering, computer science, mechatronics, dynamic control, machine learning, intelligent systems, sensor and instrument specialists, software designers, and system integration [
49,
104]. These could be available in universities, where international networks of scientists with different knowledge and experiences cooperate on the same projects.
5.1. Specific Features of Agricultural Green Vehicles
There are still some challenges for agricultural electric vehicles that should be solved, including multi-power sources and multi-drive systems that make energy management systems more complex. Moreover, there is no standard driving cycle for evaluation or a method for component sizing. Therefore, most of the powertrains in this application are designed based on customers’ average needs. These specific characteristics have made the design of agricultural HEVs complicated.
The utilization of robotics, electric drives, and alternative green fuels in agricultural vehicles and machinery offers energy efficiency and enhanced overall performance. Regarding the challenge and development level of the new technologies in the agricultural sector, having a fully autonomous, robotic, energy-independent farm is not achievable yet. However, new automated machines could perform tasks such as weeding, seeding, and harvesting for some straightforward plants and trees in the coming years. Technologies widely used in other industry sectors, such as machine learning, big data, blockchain, simulation, and augmented reality, have not yet been thoroughly studied in agriculture. The Internet of Things seems to be related to security and blockchain, highlighting that technological advances also bring complex data security and privacy issues. Concerns about information confidentiality and data integrity are major challenges for farmers [
105].
In high-tech scenarios, these concerns increase researchers’ and practitioners’ efforts to find better encryption and security techniques to mitigate the risk of cyberattacks and boost the security and privacy of their data [
106]. Furthermore, other digital technologies such as advanced communication networks, artificial intelligence, and blockchain seem to be viable for future research in the digital farming era to evaluate innovation capabilities to help to develop technological innovations in smart agriculture. In this sense, two significant challenges can be considered: the first challenge is sustainability issues, such as the continued growth of the world’s population and global warming and their negative impact on agriculture. The second strand is associated with technical challenges, such as mastering and adapting technical tools and guiding them in the best possible way for optimal profits.
These challenges are revealed by technologies that are subtopics of thematic network structures such as machine learning, deep learning, drones, cloud computing, big data, blockchain, artificial intelligence, artificial neural networks, and computer vision [
107]. Discussions related to these challenges are represented by sub-themes, such as food security, conservation agriculture, climate change adaptation, agroforestry, vegetation indexes, resilience, and mitigation.
Among the main challenges of digital technology, technological adoption is one of the features and peculiarities of emerging technologies, which are often complex given smallholder farmers’ level of technical knowledge [
108]. In addition, many developing countries have significant problems with digital infrastructure. They are gradually developing ways to deliver digital devices and applications to smaller manufacturers at a lower cost to improve profitability and product quality. Key challenges related to the adoption of digital technology have been identified, mainly associated with the complexity of technologies, agricultural culture, and their adaptation [
22].
5.2. Opportunities for Research and Practice
The development of sustainable agriculture relies on various social stakeholders, such as universities, farmers, businesses, communities, industries, and governments. The university’s involvement is essential for research to develop methods and techniques that help farmers to manage farms efficiently. Moreover, governmental programs and their financial aid can support the digital transformation of agriculture, promoting the production and consumption of sustainable products, reduction of waste, and consciousness of recycling. Adopting the latest technologies allows the transformation of value chains into digital ecosystems, potentially integrating businesses and stakeholders, benefiting every player inside the ecosystem [
109]. In industries, value ecosystems can directly affect economic performance and commercial enterprise agility in agriculture. National innovation systems can help to transfer knowledge between industries and universities [
110], facilitating the development of digital innovation. As a result, the number of start-ups working in the agricultural sector would grow. They can develop low-cost technologies to meet the requirements of small agricultural businesses. In addition, these advanced technologies should be cost-effective to meet most of the farmers’ demands for accurate control of agricultural robots.
Technologies such as big data facilitate the collection and analysis of a large amount of data. Moreover, the IoT can be used in all types of environments through its small sensors and actuators. In addition, cybersecurity can be used to address farmers’ concerns about privacy and security. Moreover, using green technologies such as renewable energy sources and electrified powertrains could help in energy independency, tackle environmental issues, and improve farming machines’ controllability. Furthermore, integrating these technologies in agricultural robots could accelerate farming progress to enhance the net farming yield. Overall, these approaches can facilitate the digital transformation of agriculture for farms of different sizes in different scenarios.
Based on the literature, some of the challenges related to robotics for Agriculture 5.0 and digital farming include optimizing the driving system, object detection, reliability in a harsh environment, sensor optimization, and path planning to work autonomously. Major areas for future research to improve current agricultural robotic systems could be mapping and localization technologies, path planning and obstacle avoidance methods, sensor fusion, computer algorithms, locomotion systems, and IoT technologies. Researchers need to find ways to introduce these advanced technologies cost-effectively and adaptably into the field of agricultural robots to meet farmers’ demands for accurate control of agricultural robots.
6. Conclusions
According to the agriculture sector’s challenges, such as population growth, labor shortage, and environmental issues, additional efforts are required to feed people by increasing productivity in sustainable ways in the coming years. In recent years, to tackle this issue, significant technological progress has appeared to exploit the optimal properties of the technology by using advanced computer technology, agricultural data, satellites, and robots. Using robotics, electric-powered devices, and alternative green fuels in agricultural vehicles and machinery offers advantages in terms of energy production and enhanced functionality. Moreover, there is potential for the independent use of such devices in farmland with on-site energy production and autonomous systems. Moving to Agriculture 5.0 is on the agenda of major farm tool manufacturers for the next decade. Therefore, off-road equipment manufacturers will play a key role in this move towards agricultural robots, and autonomous renewable electric vehicles are considered the next smarter generation of farm machines. This review introduced the necessity, benefits, challenges, successful applications, and potential opportunities of using autonomous robotics, hybrid electric drivetrains, and renewable energy sources in the agricultural sector looking towards Agriculture 5.0. Moreover, the following points summarize some of the specific ideas that could be extracted from this study.
Robotics could have great potential for many uses in agriculture. In the next step, data-driven farms integrate robotics and AI algorithms into their systems. This supports the idea of farming in the form of digital solutions combined with robotics and artificial intelligence, which represent the next idea for Agriculture 5.0. However, robotics for agricultural applications has not yet reached a commercial scale widely, and more technological developments are necessary for robotic control algorithms and security issues.
Autonomous smart agriculture is a pathway to highly automated farms using an autonomous robotic system in Agriculture 5.0. It could help to reduce costs and make farm operations more comfortable to manage in all situations, day and night. This is a step towards an intelligent agricultural system. However, future research on autonomous agricultural vehicles should involve the development of electrified powertrain systems, improved guidance system accuracy, and safe operations related to machine, environment, and human interactions.
A hybrid electric powertrain for agricultural vehicles could bring advantages such as improved overall efficiency, performance, productivity, and flexibility, which might cause improved levels of automation. However, there are some limitations in current technologies and challenges related to the specific features of agricultural vehicles, including different working environments, multi-power sources, and multi-drive systems, that make energy management systems and component sizing more complex.
On-farm energy production using renewable sources such as small hydro, solar panels, and wind turbines is a promising solution to energy crisis issues. Moreover, other green technologies, such as renewable energy-based hydrogen production, could effectively provide clean sources for the agricultural sector. However, there are still many challenges to producing hydrogen from renewable energy on energy-independent farms and using it in future eco-friendly vehicles, such as economic and technical problems.
To summarize, future research will need to consider the following aspects to enable autonomous renewable electric vehicles and robots on farms:
Improve energy storage and recharging technology for agricultural electric vehicles;
Define new standards for electric agricultural vehicles, robots, and machinery;
Use lightweight, small agricultural vehicles in a group instead of heavy vehicles to decrease environmental impacts, reduce costs, be accepted by customers, and provide flexibility;
Develop advanced technologies, control systems, intelligent setups such as collaborative and connected vehicles, Internet database analysis, artificial intelligence, blockchain, IoT, new sensors, and computer algorithms.
In this regard, the support of academic or industrial research projects and the foundation of start-ups to develop promising solutions for sustainable agriculture need to be considered.
Author Contributions
Conceptualization, A.G., G.M. and A.C.; methodology, A.G., G.M. and A.C.; formal analysis, A.G., G.M. and A.C.; investigation, A.G., G.M., A.C. and H.M.; writing, review and editing, A.G., G.M., A.C. and H.M.; funding acquisition and supervision, A.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported in part by the Ministère des Relations internationales et de la Francophonie du Quebec, MRIFQ.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Acknowledgments
The authors would like to thank the “Ministère des Relations internationales et de la Francophonie du Quebec”, MRIF, Quebec, for the financial support.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Maja, M.M.; Ayano, S.F. The impact of population growth on natural resources and farmers’ capacity to adapt to climate change in low-income countries. Earth Syst. Environ. 2021, 5, 271–283. [Google Scholar] [CrossRef]
- Miyake, Y.; Kimoto, S.; Uchiyama, Y.; Kohsaka, R. Income Change and Inter-Farmer Relations through Conservation Agriculture in Ishikawa Prefecture, Japan: Empirical Analysis of Economic and Behavioral Factors. Land 2022, 11, 245. [Google Scholar] [CrossRef]
- Christiaensen, L.; Rutledge, Z.; Taylor, J.E. The future of work in agri-food. Food Policy 2021, 99, 101963. [Google Scholar] [CrossRef] [PubMed]
- Reddy, N.V.; Reddy, A.; Pranavadithya, S.; Kumar, J.J. A critical review on agricultural robots. Int. J. Mech. Eng. Technol. 2016, 7, 183–188. [Google Scholar]
- Pacheco, F.A.L.; Fernandes, L.F.S.; Junior, R.F.V.; Valera, C.A.; Pissarra, T.C.T. Land degradation: Multiple environmental consequences and routes to neutrality. Curr. Opin. Environ. Sci. Health 2018, 5, 79–86. [Google Scholar] [CrossRef]
- Newell, R.G.; Raimi, D. Global Energy Outlook Comparison Methods: 2020 Update; Resources for the Future: Washington, DC, USA, 2020. [Google Scholar]
- Edenhofer, R.; Pichs-Madruga, Y.; Sokona, E.; Farahani, S.; Kadner, K.; Seyboth, A.; Adler, I.; Baum, S.; Brunner, P.; Eickemeier, B.; et al. Climate Change 2014: Mitigation of Climate Change. Contribution of Working Group III to the Fifth Assessment, 2014; Report of the Intergovernmental Panel on Climate Change; IPCC: Geneva, Switzerland, 2014.
- Stančin, H.; Mikulčić, H.; Wang, X.; Duić, N. A review on alternative fuels in future energy system. Renew. Sustain. Energy Rev. 2020, 128, 109927. [Google Scholar] [CrossRef]
- IRENA. Global Energy Transformation; Renewable Energy Benefits: Measuring the Economics; A Roadmap to 2050; IRENA: Abu Dhabi, United Arab Emirates, 2016. Available online: https://www.irena.org/publications/2016/Jan/Renewable-Energy-Benefits-Measuring-the-Economics (accessed on 11 June 2022).
- Newell, R.; Raimi, D.; Villanueva, S.; Prest, B. Resources for the Future Report. In Proceedings of the Global Energy Outlook 2021: Pathways from Paris, Online, 8 June 2021; Available online: https://media.rff.org/documents/RFF_GEO_2021_Report_1.pdf (accessed on 11 June 2022).
- Saiz-Rubio, V.; Rovira-Más, F. From smart farming towards agriculture 5.0: A review on crop data management. Agronomy 2020, 10, 207. [Google Scholar] [CrossRef]
- Duckett, T.; Pearson, S.; Blackmore, S.; Grieve, B.; Chen, W.H.; Cielniak, G.; Cleaversmith, J.; Dai, J.; Davis, S.; Fox, C.; et al. Agricultural robotics: The future of robotic agriculture. arXiv 2018, arXiv:1806.06762. [Google Scholar]
- Clarke, A. Robotics set to increase farm productivity. Farmers Wkly. 2017, 1160, 72–73. [Google Scholar]
- Ghobadpour, A.; Boulon, L.; Mousazadeh, H.; Malvajerdi, A.S.; Rafiee, S. State of the art of autonomous agricultural off-road vehicles driven by renewable energy systems. Energy Procedia 2019, 162, 4–13. [Google Scholar] [CrossRef]
- He, X.; Jiang, Y. Review of hybrid electric systems for construction machinery. Autom. Constr. 2018, 92, 286–296. [Google Scholar] [CrossRef]
- Rapela, M.A. Fostering Innovation for Agriculture 4.0; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Liu, Y.; Ma, X.; Shu, L.; Hancke, G.P.; Abu-Mahfouz, A.M. From Industry 4.0 to Agriculture 4.0: Current status, enabling technologies, and research challenges. IEEE Trans. Ind. Inform. 2020, 17, 4322–4334. [Google Scholar] [CrossRef]
- Mavridou, E.; Vrochidou, E.; Papakostas, G.A.; Pachidis, T.; Kaburlasos, V.G. Machine vision systems in precision agriculture for crop farming. J. Imaging 2019, 5, 89. [Google Scholar] [CrossRef]
- Klerkx, L.; Jakku, E.; Labarthe, P. A review of social science on digital agriculture, smart farming and agriculture 4.0: New contributions and a future research agenda. NJAS Wagening. J. Life Sci. 2019, 90, 100315. [Google Scholar] [CrossRef]
- Javaid, M.; Haleem, A.; Vaishya, R.; Bahl, S.; Suman, R.; Vaish, A. Industry 4.0 technologies and their applications in fighting COVID-19 pandemic. Diabetes Metab. Syndr. Clin. Res. Rev. 2020, 14, 419–422. [Google Scholar] [CrossRef]
- Oliveira, L.F.; Moreira, A.P.; Silva, M.F. Advances in agriculture robotics: A state-of-the-art review and challenges ahead. Robotics 2021, 10, 52. [Google Scholar] [CrossRef]
- Sott, M.K.; Nascimento, L.d.S.; Foguesatto, C.R.; Furstenau, L.B.; Faccin, K.; Zawislak, P.A.; Mellado, B.; Kong, J.D.; Bragazzi, N.L. A Bibliometric Network Analysis of Recent Publications on Digital Agriculture to Depict Strategic Themes and Evolution Structure. Sensors 2021, 21, 7889. [Google Scholar] [CrossRef]
- Zambon, I.; Cecchini, M.; Egidi, G.; Saporito, M.G.; Colantoni, A. Revolution 4.0: Industry vs. agriculture in a future development for SMEs. Processes 2019, 7, 36. [Google Scholar] [CrossRef]
- Chand, A.A.; Prasad, K.A.; Mar, E.; Dakai, S.; Mamun, K.A.; Islam, F.R.; Mehta, U.; Kumar, N.M. Design and Analysis of Photovoltaic Powered Battery-Operated Computer Vision-Based Multi-Purpose Smart Farming Robot. Agronomy 2021, 11, 530. [Google Scholar] [CrossRef]
- Vougioukas, S.G. Agricultural robotics. Annu. Rev. Control Robot. Auton. Syst. 2019, 2, 365–392. [Google Scholar] [CrossRef]
- Sparrow, R.; Howard, M. Robots in agriculture: Prospects, impacts, ethics, and policy. Precis. Agric. 2021, 22, 818–833. [Google Scholar] [CrossRef]
- Milella, A.; Reina, G.; Nielsen, M. A multi-sensor robotic platform for ground mapping and estimation beyond the visible spectrum. Precis. Agric. 2019, 20, 423–444. [Google Scholar] [CrossRef]
- Reina, G.; Milella, A.; Galati, R. Terrain assessment for precision agriculture using vehicle dynamic modelling. Biosyst. Eng. 2017, 162, 124–139. [Google Scholar] [CrossRef]
- Gonzalez-de Santos, P.; Fernández, R.; Sepúlveda, D.; Navas, E.; Emmi, L.; Armada, M. Field robots for intelligent farms—Inhering features from industry. Agronomy 2020, 10, 1638. [Google Scholar] [CrossRef]
- Zhao, J.; Yang, Y.; Zheng, H.; Dong, Y. Global Agricultural Robotics Research and Development: Trend Forecasts. J. Phys. Conf. Ser. 2020, 1693, 012227. [Google Scholar] [CrossRef]
- Statista. Global Market Revenue of Agricultural Robots from 2015 to 2024. 2020. Available online: https://www.statista.com/statistics/938833/agricultural-robot-revenue-worldwide/ (accessed on 25 April 2022).
- Cheein, F.A.A.; Carelli, R.O. Agricultural Robotics: Unmanned Robotic Service Units in Agricultural Tasks. IEEE Ind. Electron. Mag. 2013, 7, 48–58. [Google Scholar] [CrossRef]
- Lottes, P.; Behley, J.; Milioto, A.; Stachniss, C. Fully convolutional networks with sequential information for robust crop and weed detection in precision farming. IEEE Robot. Autom. Lett. 2018, 3, 2870–2877. [Google Scholar] [CrossRef]
- Hua, Y.; Zhang, N.; Yuan, X.; Quan, L.; Yang, J.; Nagasaka, K.; Zhou, X.G. Recent advances in intelligent automated fruit harvesting robots. Open Agric. J. 2019, 13, 101–106. [Google Scholar] [CrossRef]
- Shadrin, S.S.; Ivanova, A.A. Analytical review of standard SAE J3016, taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles with latest updates. Avtomobil’. Doroga Infrastrukt. 2019, 3, 10. [Google Scholar]
- Lytridis, C.; Kaburlasos, V.G.; Pachidis, T.; Manios, M.; Vrochidou, E.; Kalampokas, T.; Chatzistamatis, S. An Overview of Cooperative Robotics in Agriculture. Agronomy 2021, 11, 1818. [Google Scholar] [CrossRef]
- Das, J.; Cross, G.; Qu, C.; Makineni, A.; Tokekar, P.; Mulgaonkar, Y.; Kumar, V. Devices, systems, and methods for automated monitoring enabling precision agriculture. In Proceedings of the 2015 IEEE International Conference on Automation Science and Engineering (CASE), Gothenburg, Sweden, 24–28 August 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 462–469. [Google Scholar] [CrossRef]
- Andritoiu, D.; Bazavan, L.C.; Besnea, F.L.; Roibu, H.; Bizdoaca, N.G. Agriculture autonomous monitoring and decisional mechatronic system. In Proceedings of the 2018 19th International Carpathian Control Conference (ICCC), Szilvasvarad, Hungary, 28–31 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 241–246. [Google Scholar] [CrossRef]
- Shamshiri, R.R.; Kalantari, F.; Ting, K.; Thorp, K.R.; Hameed, I.A.; Weltzien, C.; Ahmad, D.; Shad, Z.M. Advances in greenhouse automation and controlled environment agriculture: A transition to plant factories and urban agriculture. Int. J. Agric. Biol. Eng. 2018, 11, 1–22. [Google Scholar] [CrossRef]
- Emmi, L.; Gonzalez-de Soto, M.; Pajares, G.; Gonzalez-de Santos, P. New trends in robotics for agriculture: Integration and assessment of a real fleet of robots. Sci. World J. 2014, 2014, 404059. [Google Scholar] [CrossRef] [PubMed]
- Tahmasebi, M.; Gohari, M.; Emami, A. An Autonomous Pesticide Sprayer Robot with a Color-based Vision System. Int. J. Robot. Control Syst. 2022, 2, 115–123. [Google Scholar] [CrossRef]
- Di Maria, E.; Reina, G.; Ishii, K.; Giannoccaro, N. Rolling resistance and sinkage analysis by comparing FEM and experimental data for a grape transporting vehicle. J. Terramech. 2021, 97, 59–70. [Google Scholar] [CrossRef]
- Sørensen, C.; Jørgensen, R.N.; Maagaard, J.; Bertelsen, K.K.; Dalgaard, L.; Nørremark, M. Conceptual and user-centric design guidelines for a plant nursing robot. Biosyst. Eng. 2010, 105, 119–129. [Google Scholar] [CrossRef]
- Hague, T.; Marchant, J.; Tillett, N. Ground based sensing systems for autonomous agricultural vehicles. Comput. Electron. Agric. 2000, 25, 11–28. [Google Scholar] [CrossRef]
- Mousazadeh, H. A technical review on navigation systems of agricultural autonomous off-road vehicles. J. Terramech. 2013, 50, 211–232. [Google Scholar] [CrossRef]
- MacKean, R.; Jones, J.L.; Francis, J.T., Jr. Weeding Robot and Method. US Patent 20210137003A1 (10,888,045), 13 May 2021. [Google Scholar]
- Gorjian, S.; Minaei, S.; MalehMirchegini, L.; Trommsdorff, M.; Shamshiri, R.R. Applications of solar PV systems in agricultural automation and robotics. In Photovoltaic Solar Energy Conversion; Elsevier: Amsterdam, The Netherlands, 2020; pp. 191–235. [Google Scholar]
- Bogue, R. Robots poised to revolutionise agriculture. Ind. Robot. Int. J. 2016, 43, 450–456. [Google Scholar] [CrossRef]
- R Shamshiri, R.; Weltzien, C.; Hameed, I.A.; J Yule, I.; E Grift, T.; Balasundram, S.K.; Pitonakova, L.; Ahmad, D.; Chowdhary, G. Research and development in agricultural robotics: A perspective of digital farming. Int. J. Agric. Biol. Eng. 2018, 11, 1–14. [Google Scholar] [CrossRef]
- Zhang, B.; Xie, Y.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Comput. Electron. Agric. 2020, 177, 105694. [Google Scholar] [CrossRef]
- Yaghoubi, S.; Akbarzadeh, N.A.; Bazargani, S.S.; Bazargani, S.S.; Bamizan, M.; Asl, M.I. Autonomous robots for agricultural tasks and farm assignment and future trends in agro robots. Int. J. Mech. Mechatron. Eng. 2013, 13, 1–6. [Google Scholar]
- Thomasson, J.A.; Baillie, C.P.; Antille, D.L.; Lobsey, C.R.; McCarthy, C.L. Autonomous Technologies in Agricultural Equipment: A Review of the State of the Art; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2019. [Google Scholar]
- Moreda, G.; Muñoz-García, M.; Barreiro, P. High voltage electrification of tractor and agricultural machinery—A review. Energy Convers. Manag. 2016, 115, 117–131. [Google Scholar] [CrossRef]
- Buning, E.A. Electric drives in agricultural machinery-approach from the tractor side. J. Agric. Eng. 2010, 47, 30–35. [Google Scholar]
- Denton, T. Electric and Hybrid Vehicles; Routledge: London, UK, 2020. [Google Scholar]
- Ghobadpour, A.; Mousazadeh, H.; Malvajerdi, A.S.; Rafiee, S. Design, Development, and Evaluation of a PV_Bio-Gen Range Extender for an Off-Road Electric Tractor. Int. J. Renew. Energy Res. IJRER 2020, 10, 388–399. [Google Scholar]
- Gonzalez-de Soto, M.; Emmi, L.; Benavides, C.; Garcia, I.; Gonzalez-de Santos, P. Reducing air pollution with hybrid-powered robotic tractors for precision agriculture. Biosyst. Eng. 2016, 143, 79–94. [Google Scholar] [CrossRef]
- Renius, K.T. Fundamentals of Tractor Design; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Ehsani, M.; Singh, K.V.; Bansal, H.O.; Mehrjardi, R.T. State of the art and trends in electric and hybrid electric vehicles. Proc. IEEE 2021, 109, 967–984. [Google Scholar] [CrossRef]
- Mocera, F.; Somà, A. A Review of Hybrid Electric Architectures in Construction, Handling and Agriculture Machines. In New Perspectives on Electric Vehicles; IntechOpen: London, UK, 2021. [Google Scholar]
- Clark, K. Farm Beneficial Electrification: Opportunities and Strategies for Rural Electric Cooperatives; Distributed Energy Resources (DER) Work Group; National Rural Electric Cooperative Association—NRECA: Arlington, VA, USA, 2018; 13p, Available online: https://www.cooperative.com/ (accessed on 11 June 2022).
- Spencer, J. The electric tractor is almost here! Farmers Wkly. 2017, 2017, 68–69. [Google Scholar]
- Subramaniam, Y.; Masron, T.A.; Azman, N.H.N. Biofuels, environmental sustainability, and food security: A review of 51 countries. Energy Res. Soc. Sci. 2020, 68, 101549. [Google Scholar] [CrossRef]
- Mousazadeh, H.; Keyhani, A.; Javadi, A.; Mobli, H.; Abrinia, K.; Sharifi, A. Evaluation of alternative battery technologies for a solar assist plug-in hybrid electric tractor. Transp. Res. Part D Transp. Environ. 2010, 15, 507–512. [Google Scholar] [CrossRef]
- Grasman, S.E. Hydrogen Energy and Vehicle Systems; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Thomas, C. Fuel cell and battery electric vehicles compared. Int. J. Hydrog. Energy 2009, 34, 6005–6020. [Google Scholar] [CrossRef]
- Magalhães, R.O.; Assunção, M.V.D.; Santos, J.P.M.; Silva, E.V.D.; Ferreira, L.d.G.; Magalhães, R.R.; Ferreira, D.D. Review on applications of electric vehicles in the countryside. Ciência Rural 2017, 47, 9. [Google Scholar] [CrossRef]
- Yang, F.; Shu, L.; Liu, Y.; Li, K.; Huang, K.; Zhang, Y.; Sun, Y. Poster: Photovoltaic Agricultural Internet of Things the Next Generation of Smart Farming. In Proceedings of the EWSN, Beijing, China, 25–27 February 2019; pp. 236–237. [Google Scholar]
- Evans, A.; Strezov, V.; Evans, T.J. Sustainability considerations for electricity generation from biomass. Renew. Sustain. Energy Rev. 2010, 14, 1419–1427. [Google Scholar] [CrossRef]
- Tse, T.J.; Wiens, D.J.; Reaney, M.J. Production of bioethanol—A review of factors affecting ethanol yield. Fermentation 2021, 7, 268. [Google Scholar] [CrossRef]
- Mamat, R.; Sani, M.; Sudhakar, K.; Kadarohman, A.; Sardjono, R.E. An overview of Higher alcohol and biodiesel as alternative fuels in engines. Energy Rep. 2019, 5, 467–479. [Google Scholar]
- Dahlgren, S. Biogas-based fuels as renewable energy in the transport sector: An overview of the potential of using CBG, LBG and other vehicle fuels produced from biogas. Biofuels 2020, 13, 587–599. [Google Scholar] [CrossRef]
- Ishaq, H.; Dincer, I. Comparative assessment of renewable energy-based hydrogen production methods. Renew. Sustain. Energy Rev. 2021, 135, 110192. [Google Scholar] [CrossRef]
- Wang, M.; Wang, G.; Sun, Z.; Zhang, Y.; Xu, D. Review of renewable energy-based hydrogen production processes for sustainable energy innovation. Glob. Energy Interconnect. 2019, 2, 436–443. [Google Scholar] [CrossRef]
- Del Cerro, J.; Cruz Ulloa, C.; Barrientos, A.; de León Rivas, J. Unmanned aerial vehicles in agriculture: A survey. Agronomy 2021, 11, 203. [Google Scholar] [CrossRef]
- Maddikunta, P.K.R.; Hakak, S.; Alazab, M.; Bhattacharya, S.; Gadekallu, T.R.; Khan, W.Z.; Pham, Q.V. Unmanned aerial vehicles in smart agriculture: Applications, requirements, and challenges. IEEE Sens. J. 2021, 21, 17608–17619. [Google Scholar] [CrossRef]
- Chowdhury, M.Z.; Shahjalal, M.; Hasan, M.; Jang, Y.M. The role of optical wireless communication technologies in 5G/6G and IoT solutions: Prospects, directions, and challenges. Appl. Sci. 2019, 9, 4367. [Google Scholar] [CrossRef]
- Tomaszewski, L.; Kołakowski, R.; Zagórda, M. Application of Mobile Networks (5G and Beyond) in Precision Agriculture. In Proceedings of the IFIP International Conference on Artificial Intelligence Applications and Innovations, Crete, Greece, 17–20 June 2022; Springer: Cham, Switzerland, 2022; pp. 71–86. [Google Scholar]
- Xing, Y.; Lei, S.; Jianing, C.; Amine, F.M.; Jun, W.; Edmond, N.; Kai, H. A survey on smart agriculture: Development modes, technologies, and security and privacy challenges. IEEE/CAA J. Autom. Sin. 2021, 8, 273–302. [Google Scholar]
- Rehman, A.; Saba, T.; Kashif, M.; Fati, S.M.; Bahaj, S.A.; Chaudhry, H. A revisit of internet of things technologies for monitoring and control strategies in smart agriculture. Agronomy 2022, 12, 127. [Google Scholar] [CrossRef]
- Lassoued, R.; Macall, D.M.; Smyth, S.J.; Phillips, P.W.; Hesseln, H. Expert insights on the impacts of, and potential for, agricultural big data. Sustainability 2021, 13, 2521. [Google Scholar] [CrossRef]
- Kunal, S.; Saha, A.; Amin, R. An overview of cloud-fog computing: Architectures, applications with security challenges. Secur. Priv. 2019, 2, e72. [Google Scholar] [CrossRef]
- Sarker, M.N.I.; Wu, M.; Chanthamith, B.; Yusufzada, S.; Li, D.; Zhang, J. Big data driven smart agriculture: Pathway for sustainable development. In Proceedings of the 2019 2nd International Conference on Artificial Intelligence and Big Data (ICAIBD), Chengdu, China, 25–28 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 60–65. [Google Scholar]
- Jha, K.; Doshi, A.; Patel, P.; Shah, M. A comprehensive review on automation in agriculture using artificial intelligence. Artif. Intell. Agric. 2019, 2, 1–12. [Google Scholar] [CrossRef]
- Patrício, D.I.; Rieder, R. Computer vision and artificial intelligence in precision agriculture for grain crops: A systematic review. Comput. Electron. Agric. 2018, 153, 69–81. [Google Scholar] [CrossRef]
- Sharma, A.; Jain, A.; Gupta, P.; Chowdary, V. Machine learning applications for precision agriculture: A comprehensive review. IEEE Access 2020, 9, 4843–4873. [Google Scholar] [CrossRef]
- Wolfert, S.; Ge, L.; Verdouw, C.; Bogaardt, M.J. Big data in smart farming—A review. Agric. Syst. 2017, 153, 69–80. [Google Scholar] [CrossRef]
- Tantalaki, N.; Souravlas, S.; Roumeliotis, M. Data-driven decision making in precision agriculture: The rise of big data in agricultural systems. J. Agric. Food Inf. 2019, 20, 344–380. [Google Scholar] [CrossRef]
- Lachure, J.; Doriya, R. Fog Computing-Based Seed Sowing Robots for Agriculture; Data Science; Springer: Singapore, 2021; pp. 295–313. [Google Scholar]
- Xu, M.; Chen, X.; Kou, G. A systematic review of blockchain. Financ. Innov. 2019, 5, 27. [Google Scholar] [CrossRef]
- Ronaghi, M.H. A blockchain maturity model in agricultural supply chain. Inf. Process. Agric. 2021, 8, 398–408. [Google Scholar] [CrossRef]
- Antonucci, F.; Figorilli, S.; Costa, C.; Pallottino, F.; Raso, L.; Menesatti, P. A Review on blockchain applications in the agri-food sector. J. Sci. Food Agric. 2019, 99, 6129–6138. [Google Scholar] [CrossRef]
- Ndiaye, M.; Hancke, G.P.; Abu-Mahfouz, A.M. Software defined networking for improved wireless sensor network management: A survey. Sensors 2017, 17, 1031. [Google Scholar] [CrossRef]
- Huang, T.; Yan, S.; Yang, F.; Liu, J. Multi-domain SDN survivability for agricultural wireless sensor networks. Sensors 2016, 16, 1861. [Google Scholar] [CrossRef]
- Milman, N.B. Defining and conceptualizing mixed reality, augmented reality, and virtual reality. Distance Learn. 2018, 15, 55–58. [Google Scholar]
- De Oliveira, M.E.; Corrêa, C.G. Virtual reality and augmented reality applications in agriculture: A literature review. In Proceedings of the IEEE 22nd Symposium on Virtual and Augmented Reality (SVR), Porto de Galinhas, Brazil, 7–10 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–9. [Google Scholar]
- Figueredo, V.; dos Reis, A.V.; Garcia, F.; Araújo, F.C. Virtual reality for agribusiness in the development of a maintenance simulator for agricultural machinery for senar goias. In Proceedings of the IEEE 21st Symposium on Virtual and Augmented Reality (SVR), Rio de Janeiro, Brazil, 28–31 October 2019; IEEE: Piscataway, NJ, USA,, 2019; pp. 17–19. [Google Scholar]
- Yazdinejad, A.; Zolfaghari, B.; Azmoodeh, A.; Dehghantanha, A.; Karimipour, H.; Fraser, E.; Green, A.G.; Russell, C.; Duncan, E. A review on security of smart farming and precision agriculture: Security aspects, attacks, threats and countermeasures. Appl. Sci. 2021, 11, 7518. [Google Scholar] [CrossRef]
- Ramon, M.C.; Zajac, D.A. Cybersecurity Literature Review and Efforts Report. In Prepared for National Cooperative Highway Research Program—NCHRP Project; Southwest Research Institute: San Antonio, TX, USA, 2018; pp. 3–127. [Google Scholar]
- Shahrubudin, N.; Lee, T.C.; Ramlan, R. An overview on 3D printing technology: Technological, materials, and applications. Procedia Manuf. 2019, 35, 1286–1296. [Google Scholar] [CrossRef]
- Kootstra, G.; Wang, X.; Blok, P.M.; Hemming, J.; Van Henten, E. Selective harvesting robotics: Current research, trends, and future directions. Curr. Robot. Rep. 2021, 2, 95–104. [Google Scholar] [CrossRef]
- Jin, Y.; Liu, J.; Xu, Z.; Yuan, S.; Li, P.; Wang, J. Development status and trend of agricultural robot technology. Int. J. Agric. Biol. Eng. 2021, 14, 1–19. [Google Scholar] [CrossRef]
- Reina, G.; Galati, R. Slip-based terrain estimation with a skid-steer vehicle. Veh. Syst. Dyn. 2016, 54, 1384–1404. [Google Scholar] [CrossRef]
- Monsalve, G.; Thiery, O.; De Moreau, S.; Cardenas, A. Development of Agricultural Robot Platform with Virtual Laboratory Capabilities. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Salam, A. Internet of things for sustainability: Perspectives in privacy, cybersecurity, and future trends. In Internet of Things for Sustainable Community Development; Springer: Berlin/Heidelberg, Germany, 2020; pp. 299–327. [Google Scholar]
- Ferrag, M.A.; Shu, L.; Yang, X.; Derhab, A.; Maglaras, L. Security and privacy for green IoT-based agriculture: Review, blockchain solutions, and challenges. IEEE Access 2020, 8, 32031–32053. [Google Scholar] [CrossRef]
- Fountas, S.; Espejo-García, B.; Kasimati, A.; Mylonas, N.; Darra, N. The future of digital agriculture: Technologies and opportunities. IT Prof. 2020, 22, 24–28. [Google Scholar] [CrossRef]
- Ofori, E.; Griffin, T.; Yeager, E. Duration analyses of precision agriculture technology adoption: What’s influencing farmers’ time-to-adoption decisions? Agric. Financ. Rev. 2020, 80, 647–664. [Google Scholar] [CrossRef]
- Valdez-De-Leon, O. How to develop a digital ecosystem: A practical framework. Technol. Innov. Manag. Rev. 2019, 9, 43–54. [Google Scholar] [CrossRef]
- Thomas, E.; Faccin, K.; Asheim, B.T. Universities as orchestrators of the development of regional innovation ecosystems in emerging economies. Growth Change 2021, 52, 770–789. [Google Scholar] [CrossRef]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).




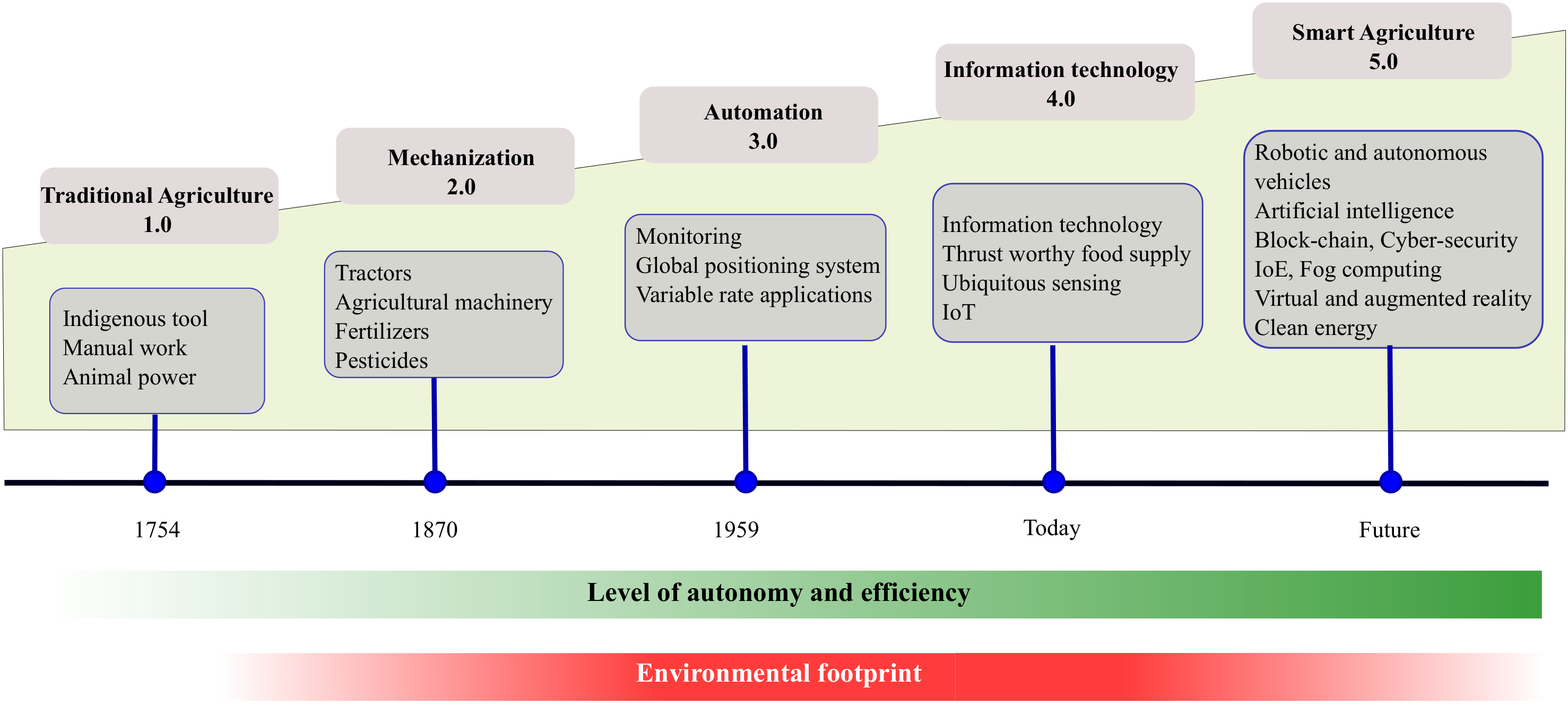{kind=link}
{kind=link}
{kind=link}


